doc - CCAR
advertisement

AAS 05-380
CHAINING SIMPLE PERIODIC THREE BODY ORBITS
Martin W. Lo* and Jeffrey S. Parker†
This paper studies the chaining of periodic orbits via their invariant manifolds to
provide various types of low energy orbits for space exploration, particularly in
the Sun-Earth-Moon system. This technique was used for the design of the
Genesis mission (see Howell et al.1) as well as the Lunar Sample Return mission
study (see Lo & Chung2). Recent work shows that this approach may be used to
design planetary flyby and planetary capture orbits. This shows that the
technique for chaining periodic orbits is much more general and widely
applicable, and is not restricted to libration missions only. The use of invariant
manifolds provides a unified theoretical approach for studying these different
mission applications. It also provides robust numerical algorithms for the
computation and optimization of such trajectories.
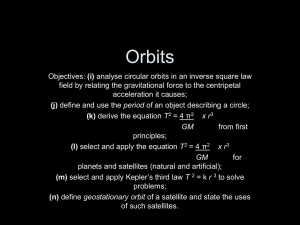
INTRODUCTION
Poincaré once said that the key to understanding a dynamical system (i.e. a system of ordinary
differential equations) is through its periodic orbits. The practical importance of periodic orbits for space
missions is obvious to everyone. Periodic orbits about planets and moons, halo orbits, are but a few obvious
examples. However, periodic orbits have another feature which in recent years have become increasing
more important in the design of complex missions. In the case of unstable periodic orbits, they possess
stable and unstable manifolds, also collectively known as invariant manifolds. Invariant manifolds are
made up of asymptotic orbits to the periodic orbit; those which approach the periodic orbit form the stable
manifold, while those which depart the periodic orbit form the unstable manifold. These manifolds form
tubes in space providing free transport to and from the periodic orbit, in some instances covering vast
distances. The collection of all such invariant manifolds form a complex transport system in the Solar
System that is popularly called the “Interplanetary Superhighway” (see Lo3).
In our previous paper (Lo and Parker 2004 4), we provided a study of several families of unstable
planar periodic orbits in the Earth-Moon system which we think may have potential applications for the
exploration of the Moon and beyond. In this paper, we study the invariant manifolds of those periodic
orbits and their applications to space missions. In addition to providing ultra low energy transfers between
various parts of the Earth-Moon region, by intersecting invariant manifolds, we can construct new periodic
orbits with almost arbitrary properties. Moreover, they require very little propellant for control. In
particular, starting with several unstable periodic orbits of the same energy (Jacobi constant), using this
technique we are able to construct a new periodic orbit built upon the behavior of these periodic orbits,
thereby producing a cycler orbit that visits each of the periodic orbits.
*
Visiting Associate, Computer Science, California Institute of Technology, Pasadena ,CA 91125. E-mail: Martin.Lo@jpl.nasa.gov.
Doctoral Student, Colorado Center for Astrodynamics Research, University of Colorado at Boulder, 431 UCB, Boulder, CO 803090431. E-mail: parkerjs@colorado.edu.
†
1
Historically, the idea of chaining periodic orbits has been around for quite some time frequently
under other names. For example, the technique of multiple gravity assist is achieved by chaining arcs of
resonant conic orbits. Recently Anderson & Lo 2004 5 have shown that in fact the underlying dynamics is
provided by the invariant manifolds of unstable resonant orbits. Thus we see that the idea of chaining
periodic orbits together via their invariant manifolds is crucial for trajectory design. It, in fact, provides a
unifying principle for trajectory design and optimization that includes conic orbits, 3-body orbits, n-body
orbits, impulsive thrust orbits, and low thrust orbits. There lies its significance.
INVARIANT MANIFOLDS OF PERIODIC ORBITS
Three Body Problem
The Circular Restricted Three-Body Problem (CRTBP) is used as a model for the motion of a
spacecraft in the Earth-Moon and Sun-Earth systems. The CRTBP places two primary bodies, e.g., the Sun
and Earth-Moon barycenter or the Earth and Moon, in circular orbits about their barycenter and uses their
gravitational attraction to approximate the motion of a massless third body. The primary bodies are
assumed to be point-masses and no other forces or perturbations are included in the model. This system
approximates the real solar system well since most bodies in the solar system orbit are in nearly circular
orbits and their masses are much larger than a spacecraft’s mass. For more information about the CRTBP,
see Szebehely6.
Periodic Orbits of the Three Body Problem
LL4
300
200
100
3
y (x10 km)
The CRTBP has five equilibrium
solutions, known as the five Lagrange points,
where the gravity of the two massive bodies
balances with the motion of the system.
Figure 1 shows a plot of these five points in
the Earth-Moon system, labeled LL1 to LL5.
Numerous periodic orbit solutions exist
in this system and the solutions may be
grouped into families. Strömgren7 classified
many families of solutions as simple periodic
orbits, including all solutions that were
symmetric about the x-axis that pierced the xaxis exactly twice per orbit.
Several
examples of such orbits are shown in Figure
2, below. Further discussion of simple
periodic orbits may be found in Hénon8-13
and Broucke14 and references therein.
LL3
0
LL1
Earth
LL2
Moon
-100
-200
LL5
-300
-400
-300
-200
-100
0
100
200
300
400
500
x (x103 km)
Figure 1. The Earth, Moon, and five Lagrange points in the
rotating coordinate system of the CRTBP.
Invariant Manifolds
The periodic orbits shown in the previous section are typically unstable. Unstable periodic and
quasiperiodic orbits in the RTBP (a property of Hamiltonian systems) generate two families of asymptotic
orbits: one family asymptotically departs the periodic orbit forming the unstable manifold, another family
asymptotically winds onto the periodic orbit forming the stable manifold. Collectively, they are referred to
as invariant manifolds. We refer to the periodic orbit as the generating orbit for the invariant manifolds.
For periodic orbits, they form tubes in space. Their structure can become extremely complex through
repeated intersections with other tubes. See Parker & Chua 15 for more information.
Figure 3 shows the stable and unstable invariant manifolds for a typical libration orbit around
2
Figure 2. Several example families of simple, periodic, three-body orbits in the Earth-Moon CRTBP.
Top-left: the family of Lyapunov orbits about LL1.
Top-right: the family of 5:1 resonant orbits about the Earth-Moon system.
Bottom-left: the family of Lyapunov orbits about LL2.
Bottom-right: the family of Distant Prograde Orbits about the Moon.
LL2. The invariant manifolds of other libration orbits, such as those about the LL 1 point, are similar. One
can see the underlying tubular structure in the manifolds. Notice that there are two stable and two unstable
invariant manifold sets for a given periodic orbit, corresponding to perturbations in both the positive and
negative directions. As the manifolds approach one of the primaries, this structure begins to break down
due to complex interactions with other tubes near the primaries.
3
Stable Invariant Manifold
Unstable Invariant Manifold
120
60
100
40
20
Moon
0
Motion
Y (x103 km)
Y (x103 km)
20
Motion
60
Periodic Orbit
40
Moon’s
Orbit
80
0
Moon
-20
-40
-60
-20
Moon’s
Orbit
-80
-40
Periodic Orbit
-100
Figure 3. The stable (left) and unstable (right) invariant manifolds for an orbit about LL2.
-60
300
-120
400
450
500
550
600
300
350
400
450
500
550
3
Mission designers
may
use
these
invariant
manifolds
to
model the motion
of spacecraft in their
X (x10 km)
3
X (x10
vicinity. If a mission’s objective is to transfer onto an unstable periodic orbit,
thenkm)
the spacecraft need only
target any point (both position and velocity) on that orbit’s stable manifold in order to arrive onto that orbit.
350
CHAINING PERIODIC ORBITS BY INTERSECTING MANIFOLDS
A spacecraft in orbit about an unstable periodic orbit only needs to make a slight deviation in its state
to depart from that orbit, after which it would closely follow a trajectory in the orbit’s unstable manifold.
Similarly, a particle or spacecraft that is traveling on a periodic orbit’s stable manifold will asymptotically
approach the generating periodic orbit. Thus, to transfer from one unstable periodic orbit to another, a
spacecraft only needs to find the intersections of its current orbit’s unstable manifold with the desired final
periodic orbit’s stable manifold. If the intersection of the manifolds is in configuration space only, the
spacecraft may then perform a single maneuver at the intersection to transfer from its initial orbit to its
desired orbit. This is shown in Figure 4, below.
Figure 4. The intersection of the unstable manifold of a Lyapunov orbit about LL1 with
the stable manifold of a Lyapunov orbit about LL2.
4
600
Figure 5. Two example free transfers between the two manifolds shown in Figure 4.
If the intersection of the manifolds takes place in phase space, then no maneuver is necessary for the
transfer and the transfer is free. This can happen only if the two periodic orbits have the same Jacobi
constant and their manifolds intersect in phase space. Two examples of such free transfers are shown in
Figure 5 for the same periodic orbits shown in Figure 4.
Intersecting Invariant Manifolds
80
τ = 0.25
60
40
20
y (x103 km)
An orbit in a family may be uniquely identified
by some parameter, where that parameter varies
continuously from one end of the family to the other. 8
The Jacobi constant of the periodic orbit is a typical
parameter that varies continuously from one end of a
family of periodic orbits to the other. Finally, the
parameter τ may be used to uniquely identify the
location of a particle or spacecraft as it orbits a given
periodic orbit. In this paper, the parameter τ is defined
as the ratio of tc to P, where tc corresponds to the time
that has elapsed from some reference point to the
current point about the orbit and P is the period of the
orbit. Thus, τ varies continuously from 0 to 1 as a
particle moves about the periodic orbit. The reference
point of the orbit is the orthogonal x-axis crossing in the
+vy direction, as shown in Figure 6. Thus, τ is defined
to be 0 at the orbit’s initial x-axis crossing in the +vy
direction (see arrow in Fig. 6) and 0.5 in the –vy
direction.
0
Moon
τ = 0.0
τ = 1.0
LL2
τ = 0.5
-20
-40
-60
τ = 0.75
-80
360
380
400
420
440
460
480
x (x103 km)
Figure 6. The definition of τ for this study.
Trajectories on an orbit’s stable and unstable manifolds may be approximated by taking the state of a
particle along the orbit at various values of τ and perturbing those states along the direction of the local
stable or unstable eigenvectors of the monodromy matrix (see Parker & Chua15). Furthermore, the states
may be perturbed in a positive sense or a negative sense, producing the two sets of manifolds seen in Figure
3.
5
Shadow Periodic Orbits (Non-Free Transfers)
Using the above nomenclature, a state space map may be constructed that shows the cheapest
intersection between the two trajectories T 1 and T2, where T1 is the trajectory on one orbit’s unstable
manifold produced at 1 and T2 is the trajectory on a second orbit’s stable manifold produced at
2 .
Figure 7 shows the state space map when one intersects the unstable manifold of a Lyapunov orbit
about LL1 with the stable manifold of a Lyapunov orbit about LL2. They must have the same Jacobi
constant for intersection in phase space to occur. These are the same orbits shown in Figures 4 and 5,
above. The dark regions of the state space map indicate regions that require very little energy for transfer;
the light regions require larger ΔVs. Figure 8 shows the same state space map with plots of some of the
corresponding trajectories around it. Trajectories have been plotted for inexpensive transfers as well as for
expensive transfers. This illustrates what the state space map represents.
Heteroclinic and Homoclinic Orbits (Free Transfers)
The darkest regions shown in Figure 7 indicate trajectories that require very little energy to transfer
orbits. To transfer from one orbit to another for free, the unstable manifold of the first orbit must intersect
the stable manifold of the second orbit in phase space. Two requirements for that condition to occur are
that both orbits must be unstable and their Jacobi constants must be identical. With those requirements
met, one may construct transfers such as those given in Figure 5.
Figure 9 represents several families of simple, planar, symmetric orbits in the Earth-Moon CRTBP.
This was described in Lo and Parker2, see also Broucke14. Each curve in the plot represents a family of
periodic orbits. Each point along each curve represents an orbit that has an orthogonal x-axis crossing
given by the x0-value in the plot and a Jacobi constant given by the C-value in the plot. The dark curves
represent unstable orbits and the light curves represent neutrally stable orbits.
Any two families of unstable orbits that share the same Jacobi constant may have a free transfer
between them. The free transfers shown in Figure 5 are between two unstable orbits with a Jacobi constant
of 3.13443929. Figure 10 shows a blow-up of a small region on the right side of Figure 9, indicating that
the two orbit families do indeed share that Jacobi constant value. Furthermore, a particle or spacecraft with
that Jacobi constant may also transfer to a distant prograde orbit for free, as well as many other types of
unstable orbits. A free transfer orbit between two distinct periodic orbit is called a heteroclinic orbit. A free
transfer orbit from a periodic orbit onto itself is called homoclinic orbit. Homoclinic and heteroclinic orbits
are actually asymptotic orbits since they are produced from the intersection of stable and unstable
manifolds which consist of asymptotic orbits. This means they require infinite time to wind off and wind on
to the periodic orbits. At first glance they may appear to be of little value to mission design since all orbits
must be traversed in finite time. It turns out that nearby these asymptotic orbits are finite time orbits with
similar behavior which can be used for mission design. For example, the heteroclinic dynamics between
EL1 and EL2 was used to produce the Genesis Earth-Return trajectory (see Howell et al.1, Koon et al. 16)
6
Figure 7. The state space plot of the intersection of the unstable manifold of a Lyapunov orbit about LL 1 with
the stable manifold of a Lyapunov orbit about LL2. The darkest regions require the least amount of energy to
transfer.
Figure 8. The state space plot shown in Figure 7, above, with example transfers.
7
5
Lyapunov Orbits
about LL1
4
C (Jacobi Constant)
Distant Retrograde
Orbits about the System 3
Lyapunov Orbits
about LL3
Distant Prograde Orbits
about the Moon
2
Lyapunov Orbits
about LL2
1
Distant Retrograde
Orbits about the Moon
0
-1
LL1
-2
-3
-1200
LL3
-1000
-800
-600
Earth
-400
-200
LL2
Moon
0
200
400
X0 (x103 km)
Figure 9. A plot of x0 vs. C for several families of planar, symmetric, periodic orbits in the Earth-Moon CRTBP.
Orbits plotted in black are unstable; orbits plotted in gray are neutrally stable.
3.2
C (Jacobi Constant)
3.15
C = 3.13443929
3.1
3.05
Lyapunov Orbits
about LL2
Lyapunov Orbits
about LL1
Distant Prograde
Orbits about the Moon
3
2.95
2.9
240
LL1
260
280
300
320
LL2
Moon
340
360
3
380
400
420
440
X0 (x10 km)
Figure 10. A blow-up of Figure 9 showing the heteroclinic transfers displayed in Figure 5. The blue line
indicates a Jacobi constant equal to 3.13443929.
8
50
40
30
y (x103 km)
20
10
LL1
LL2
Moon
0
-10
-20
-30
-40
-50
320
340
360
380
400
420
440
x (x103 km)
Figure 11. Free transfers between a Lyapunov orbit about LL1, a Distant Prograde Orbit about the Moon, and
a Lyapunov orbit about LL2, where every orbit and trajectory has the same Jacobi constant C = 3.13443929.
Figure 11 shows four other free transfers between the same Lyapunov orbits shown above and a
Distant Prograde Orbit (DPO) of the same Jacobi constant. The transfers shown in brown travel away from
the DPO; the transfers shown in green travel toward the DPO.
FINDING NEW PERIODIC ORBITS USING CHAINS
Symmetric periodic orbits have exactly two orthogonal x-axis crossings per period. There may
certainly be other x-axis crossings, but no more and no fewer than two of them may be orthogonal. Simple
periodic orbits, as defined by Strömgren7, do not pierce the x-axis except at the two orthogonal crossings.
We next show that many complicated periodic orbits may be generated by chains of simple periodic orbits.
A logical way to construct a symmetric orbit is to begin at one of the orthogonal x-axis crossings and
find a trajectory that pierces the x-axis orthogonally in the opposite sense at a later time. That trajectory
would then be half of the periodic orbit. A symmetric orbit may therefore be uniquely represented by one
of its orthogonal x-axis crossings using either [x0, vy0] or [x0, C], where vy0 is the y-component of the
velocity at the x crossing and C is the orbit’s Jacobi constant. Figure 12 shows the initial conditions [x0,
vy0] needed to construct the orbits in the family of Lyapunov orbits about LL 1. Figure 13 shows the same
family of orbits plotted as x0 vs. C.
9
1.8
3.2
1.6
1.4
3.1
C (Jacobi Constant)
1
0
vy (km/s)
1.2
0.8
0.6
2.9
2.8
0.4
0.2
0
100
3
2.7
150
200
250
300
350
150
x 0 (x103 km)
200
250
300
350
x 0 (x103 km)
Figure 12. A plot of x0 vs. vy0 for the family of
Lyapunov orbits about LL1.
Figure 13. A plot of x0 vs. C for the family of
Lyapunov orbits about LL1.
In theory, a free transfer between two unstable symmetric periodic orbits is itself a periodic orbit, but
with a period of infinity. After leaving the first periodic orbit, e.g., the Lyapunov orbit, the particle
asymptotically approaches the second orbit, e.g., the DPO. At infinity, the particle would finally pierce the
x-axis again orthogonally and could then begin the route back. With a slight modification, one can instead
construct a trajectory that does not actually trace out either of the two generating orbits, but comes
arbitrarily close to them before piercing the x-axis orthogonally in a finite amount of time. The new
trajectory would Lyapunov orbit around LL1 n1 times, transfer to the DPO and follow the DPO n2 times. In
the event we are able to make two of the x-crossings of this new orbit orthogonal to the x-axis, the
resulting orbit would be periodic. We call such a periodic orbit a compound periodic orbit generated by the
chain of simple periodic orbits.
REPRESENTATION OF CHAINS WITH SYMBOLIC DYNAMICS
We now need some notation to describe the orbits that chain of periodic orbits. Suppose we let A, B,
C denote 3 simple periodic orbits. Suppose that the invariant manifolds of A and B intersect in phase space,
next, suppose the invariant manifolds of B and C also intersect in phase space, then it is possible to transfer
from A to B to C via their intersecting invariant manifolds. Let n A be a natural number and let { nA } denote
an orbit which shadows A closely for nA revolutions, although we do not assume that it is necessarily
periodic. Similarly, we let { nA , nB} denote an orbit which shadows A closely for n A revolutions, then
shadows orbit B for nA revolutions. Once again we do not assume that it is necessarily periodic. Such finite
sequences are fragments of more complex orbits which can be used to construct orbits with specific
properties for a particular mission. In the case of a periodic orbit that shadows A and B n A and nB
revolutions respectively, we can represent it by the doubly infinite sequence, { … n A , nB, nA , nB, nA , nB,
…}. More simply, we use square brackets to denote such periodic orbits: [n A , nB] for a periodic orbit with
generating orbits A and B, [nA , nB, nC] for a periodic orbit with generating orbits A, B, C. We refer to the
compound periodic orbit [nA , nB, nC] as a chain generated by A, B, C.
The fact that given any sequence of numbers nA , nB, nC, one can find a natural orbit { nA , nB, nC} is a
highly non-trivial theorem of Moser’ involving a subject known as “symbolic dynamics”. In order for this
to be true, there must be a heteroclinic connections between A, B, and C. However, this theory is not
important for our discussion, the interested reader is referred to Koon et al.16 and references therein for
more information. All that is important for our discussion is the fact the such compound periodic orbits
exist and by using differential correctors, one can easily produce them at will.
Some example of chains produced in this manner are shown in Figure 14 for [n1, n2] = [11, 11], [5,
5], [1, 3], and [1, 1], where n1 refers to a Lyapunov orbit about LL1, and n2 refers to a DPO (Distant
Prograde Orbit) around the Moon. As the value of ni increases, the trajectory gets closer to tracing the true
10
40
30
30
20
20
10
n1=11, n2=1110
y (x103 km)
y (x103 km)
40
0
-10
-20
-30
-30
-40
320
340
360
380
400
420
310
x (x103 km)
40
320
330
340
30
30
20
20
10
n1=5, n2=5
0
-10
360
370
380
390
400
410
10
n1=1, n2=1
0
-10
-20
-20
-30
-30
-40
350
x (x103 km)
40
y (x103 km)
y (x103 km)
-10
-20
-40
n1=1, n2=3
0
-40
310
320
330
340
350
360
370
380
390
400
310
410
320
330
340
350
360
370
380
390
400
410
x (x103 km)
x (x103 km)
Figure 14. Example periodic chains between a Lyapunov orbit about LL1 and a Distant Prograde Orbit about the
Moon.
generating periodic orbit. One can see, though, that the value of ni does not need to be very high before the
trajectory approximates the generating periodic orbit quite closely.
Constant Homotopy Type (Orbital Families)
Each periodic orbit family in the CRTBP can be classified by its homotopy type, i.e. its winding
numbers around certain prescribed points which we call centers. For instance, the family of Lyapunov
orbits about LL1 revolves about the LL1 point as center once per orbit, piercing the x-axis orthogonally each
time. The choice of the center is somewhat arbitrary and depends on what is convenient to the
classification problem at hand. Each compound periodic orbit generated by a chain of simple periodic
orbits is a member of a family of periodic orbits, as observed in Figure 9. Figure 15 shows the evolution of
the family of the chained periodic orbit produced from two revolutions about LL1 followed by one
revolution about the Moon. Figure 16 shows the initial conditions (x0 vs. vy0 for the first orthogonal x-axis
crossing) needed to produce these orbits and the evolution of their Jacobi constant (x0 vs. C). Compare
these plots with the family of Lyapunov orbits about LL1and notice that the differences are small.
11
25
60
80
30
20
60
40
15
20
40
-5
y (x103 km)
0
0
-10
y (x103 km)
20
10
5
y (x103 km)
y (x103 km)
10
0
20
0
-20
-20
-10
-40
-20
-15
-40
-20
-60
-30
-80
-60
-25
320
330
340
350
360
370
380
320
330
340
350
3
360
370
380
390
400
280
300
320
340
3
x (x10 km)
360
380
400
420
250
300
3
x (x10 km)
350
400
450
x (x103 km)
x (x10 km)
150
100
150
100
80
100
100
60
50
-20
-40
0
50
y (x103 km)
0
50
y (x103 km)
20
y (x103 km)
y (x103 km)
40
0
0
-50
-50
-50
-60
-100
-100
-80
-100
-150
-100
-150
200
250
300
350
400
450
200
250
300
3
350
400
450
500
150
200
250
x (x103 km)
x (x10 km)
300
350
400
450
500
550
150
200
250
x (x103 km)
300
350
400
450
500
550
x (x103 km)
Figure 15. The evolution of a family of chained orbits, beginning in the top-left and continuing left-to-right and
top-to-bottom. These orbits consist of two revolutions about LL1 followed by one revolution about the Moon.
-3
x 10
2
1
vy - 0.2701
1
0.8
0.6
0.4
0
vy
0
1.5
0.5
0.2
0.4
0.45
0.5
0.55
0.6
x0
0.65
0.7
0.75
0.8
0
0.85
Jacobi Constant (C)
3.4
3.2
3
2.8
2.6
0.35
0.4
0.45
0.5
0.55
0.6
x0
0
1
2
3
4
-4
Jacobi Constant (C) - 3.1222
0
0.35
0.65
0.7
0.75
0.8
0.85
5
x 10
5
6
x 0 - 0.8101
7
5
6
x 0 - 0.8101
7
8
9
-5
x 10
4
3
2
1
0
0
1
2
3
4
8
9
-5
x 10
Figure 16. The initial conditions at the first orthogonal x-axis crossing (top) and the Jacobi constants (bottom)
of the family of chained orbits shown in Figure 15. The plots on the right show a direct comparison between
these plots and the plot of the initial conditions and Jacobi constants of the family of Lyapunov orbits about LL 1.
Constant Energy
Chains of periodic orbits may be constructed in countless combinations. One may construct a
periodic orbit chain that encircles LL1 n1 times followed by the Moon n2 times, where n1 and n2 may be any
positive integer. For this paper, every periodic orbit chain has been constructed for n1 and n2 in the range
1 ≤ n1 ≤ 13 and 1 ≤ n2 ≤ 15. Figures 17 and 18 show the families of these chains relative to one another by
plotting their x0-value vs. their vy0-value and their C-value, respectively. The families are colorcoordinated such that the families with n1 = 1 are colored in the darkest blue and the colors vary until the
families with n1 = 13 are colored in the darkest red. The notation in the plot n1 = 2+ means n1 = 2, 3, 4, …
One can see that the orbital parameters for each of these families are very similar, but all have unique
parameters. As the value of n1 gets very large, the orbital parameters for the family approach the orbital
parameters of the family of Lyapunov orbits about LL1. It appears these orbits form a Cantor set.
12
-3
x 10
2
n1 = 2+
1
n1 = 1
0
-1
-2
-150
-100
-50
0
50
100
Nominal x 0 = 312,421.1 km
Nominal vy = 0.2534265 km/s
-200
-6
x 10
1
n1 = 2
n1 = 3+
0.5
0
200
-5
x 10
5
n1 = 1
n2 = 2+
n1 = 1
n2 = 1
0
-8
x 10
2
1
0
0
0
0.15
-1
-3
-2
-1
0
1
Nominal x 0 = 312,280.82822 km
2
3
-5
-6
-4
-2
0
2
Nominal x 0 = 312,546.24 km
-5
x 10
2
1
-1
-2
0
-3
-2
-3
x 10
-1
0
1
Nominal x 0 = 312,281.0067390 km
2
3
-3
4
6
-8
x 10
5
0
0
-8
x 10
1
0.1
Nominal vy = 0.2533786 km/s
-0.05
0
0.05
Nominal x 0 = 312,280.914 km
0
-0.1
Nominal vy = 0.2529641 km/s
-0.15
Nominal vy = 0.2534046 km/s
-1
0
Nominal vy = 0.2529641 km/s
150
0
-0.5
0
Nominal vy = 0.2529640 km/s
0
Nominal vy = 0.25289 km/s
The plots in Figures 17 and 18 demonstrate that every chain has a unique set of states, but one
chain’s states may be very close to another chain’s states. Station keeping would be required to ensure that
a spacecraft followed its prescribed chain for a practical mission. Additionally, a particle or spacecraft may
transfer from one chain to another very inexpensively using the same procedures as those presented above
using the invariant manifolds of the chains themselves.
-1
-2
-2.5
-2
-1.5
x 10
-1
-0.5
0
0.5
1
Nominal x 0 = 312,543.6343900 km
1.5
2
2.5
-5
-0.01 -0.008 -0.006 -0.004 -0.002
0
0.002 0.004 0.006 0.008
Nominal x 0 = 312,551.1888756 km
0.01
Figure 17. A plot of the x0 vs. the vy0 of families of chained periodic orbits between LL1 and the Moon. The
plots are zoomed-in to explore the details and to show that each family indeed has unique orbital parameters.
-4
Nominal C = 3.133495
x 10
5
n1 = 2+
n1 = 1
0
-5
-200
-150
-100
-50
0
50
100
Nominal x 0 = 312,421.1 km
-7
n1 = 2
n1 = 3+
0
-1
-2
-0.1
-0.05
0
0.05
Nominal x 0 = 312,257.946 km
-8
0
-2
0.1
-8
0
-1
-2
0
2
Nominal x 0 = 312,257.84235 km
4
6
-4
-2
0
2
4
Nominal x 0 = 312,580.07 km
-6
2
1
0
-1
-2
-1
-3
x 10
-6
-0.5
0
0.5
Nominal x 0 = 312,258.0469251 km
1
8
x 10
5
0
-5
-2.5
-3
x 10
6
-8
x 10
Nominal C = 3.1334952
Nominal C = 3.1333524
0.5
-0.5
n1 = 1
n2 = 2+
-1
x 10
1
n1 = 1
n2 = 1
1
-9
x 10
Nominal C = 3.1333524
2
Nominal C = 3.1335065
1
Nominal C = 3.1335061
Nominal C = 3.1333524
x 10
2
-4
200
-5
x 10
-6
150
-2
-1.5
-1
-0.5
0
0.5
1
1.5
Nominal x 0 = 312,575.1757282 km
2
2.5
1
0.5
0
-0.5
-1
-5
-4
-3
-2
-1
0
1
2
Nominal x 0 = 312,583.5642257 km
3
4
5
-3
x 10
Figure 18. A plot of the x0 vs. the C of the families of chained periodic orbits between LL1 and the Moon. The
plots are zoomed-in to explore the details and to show that each family indeed has unique orbital parameters.
13
Invariant Manifolds of Periodic Chained Orbits
An unstable periodic orbit chain also has an associated set of invariant manifolds. These manifolds
resemble the invariant manifolds of the generating simple periodic orbits near the regions of space where
the chain resembles its generating orbits. Figure 19 shows the stable invariant manifold of a chain that
makes one revolution about LL1 followed by two revolutions about the Moon, compared with the stable
invariant manifolds of a Lyapunov orbit about LL1 and a Distant Prograde Orbit about the Moon, each
having the same Jacobi constant as the chain. One can see that the large-scale structure of the chain’s
manifolds contains elements from both generating orbits. Figure 20 shows the same comparison for the
unstable invariant manifolds of these three periodic orbits.
APPLICATIONS TO EXPLORATION OF SPACE
One of the key technology required for any age of exploration is the development of accurate maps. During
the age of Columbus, maps of the world were treasured state secrets; map making went hand in hand with
each expedition launched from Europe. Just imagine today the space program without an accurate map of
the stars, how would spacecraft point and navigate? The Exploration of Space is no different. What we
need now is a map of the periodic orbits and their invariant manifolds in the Solar System, basically a map
of the Interplanetary Superhighway. Such a map would provide us with the starting points for designing
ultra efficient, low energy orbits for any mission through out the Solar System. As we mentioned earlier in
the Introduction Section, this would capture all orbits from conic orbits to N-body trajectories, trajectories
using impulsive or continuous thrust, trajectories using planetary flybys, etc. The methodology developed
in this paper is but an infinitesimal step towards a unified theoretical framework for designing and
optimization space trajectories from the simplest to the most complex imaginable.
How would this unified theoretical framework built upon the maps of the periodic orbits benefit
space exploration? For one thing, there are many interesting orbits which we have yet to discover that have
potentially extremely useful properties for space travel and transport. Consider some of the chains
discussed earlier, these cycler orbits may provide an ideal system for inexpensive cargo transport in the
Earth-Moon environment. By considering larger periodic orbits on the scale of the Earth’s orbit, these may
provide a chain to capture rogue near Earth asteroids and comets to provide an infinite source of raw
material for the hungry Earth and its colonies on the Moon and in space.
Another key reason for the importance of the map of the periodic orbits and their manifolds is the
fact that they replace the role of orbital elements for highly nonlinear N-body trajectories which cannot be
described by a simple set of 6 orbital elements. With such a map available on board a spacecraft, we can
serious consider the capability for the spacecraft computer to autonomous plan the trajectory and navigate it
without human intervention. On the ground, this would help automate the complex process of mission
design that currently requires painstaking trajectory design and optimization by a team of engineers.
Imagine if the mission manager can simply search the map of periodic orbits and quickly order the
computer to construct a chain [A, B, C] to tour these three periodic orbits for his/her mission.
14
50
50
40
30
20
y (x103 km)
y (x103 km)
10
0
-10
0
-20
-30
-40
-50
300
350
400
-50
260
450
280
300
320
x (x103 km)
340
360
380
400
420
360
380
400
420
x (x103 km)
50
50
40
30
10
y (x103 km)
y (x103 km)
20
0
-10
0
-20
-30
-40
-50
300
350
400
-50
260
450
280
300
320
x (x103 km)
340
x (x103 km)
Figure 19. The stable invariant manifold of a [1,2] chain (top) compared with the stable
invariant manifolds of the two generating orbits (bottom).
50
50
40
30
y (x103 km)
y (x103 km)
20
10
0
-10
0
-20
-30
-40
-50
300
350
400
-50
260
450
280
300
320
x (x103 km)
340
360
380
400
420
x (x103 km)
50
50
40
30
10
y (x103 km)
y (x103 km)
20
0
-10
0
-20
-30
-40
-50
300
350
400
450
x (x103 km)
-50
260
280
300
320
340
360
380
400
420
x (x103 km)
Figure 20. The unstable invariant manifold of a [1,2] chain (top) compared with the unstable
invariant manifolds of the two generating orbits (bottom).
CONCLUSIONS AND NEXT STEPS
We have shown how unstable simple periodic orbits may be chained together using their invariant
manifolds to produce new periodic orbits called “chains”. These chains strongly resemble their generating
orbits and their invariant manifolds are also very similar. These chains are the natural cycler orbits defined
15
by their winding numbers around various centers. From symbolic dynamics theory, we know that there are
infinitely many chains generated by practically any combination of unstable simple periodic orbits.
For the next steps, we need to characterize the periodic orbits and the chains their generate as well as
their associated invariant manifolds. For example, how close can one approach the Moon using these
chains? What kinds of cycler orbits (chains) exists between the Earth and the Moon? How suitable are these
chains for cargo transport.
These chains are delicate orbits the live in the chaotic regime. They have been created in the CRTBP.
What happens when we add in perturbations from the Sun, other planets, the solar wind, and use a more
accurate ephemeris model? Will these delicate orbits simply vanish? From our experience working with
halo orbits and complex planetary flyby orbits, the answer is that something useful may persist, although
with changed characteristics. Exactly what persists and how the orbits are changed are important problems
that must be studied and understood before we can take advantage of the great bounty periodic orbits
provide us for space exploration.
REFERENCES
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
Howell, K., B. Barden, M. Lo, “Application of Dynamical Systems Theory to Trajectory Design for a Libration
Point Mission”, JAS 45(2), April-June 1997.
Lo, M.W., M.K. Chung “Lunar Sample Return via the Interplanetary Superhighway”, AIAA/AAS Astrodynamics
Specialist Meeting, Monterey, CA, August, 2002, Paper No. AIAA 2002-4718.
Lo, M.W., “The Interplanetary Superhighway and the Origins Program”, IEEE Aerospace 2002 Conference, Big
Sky, MT., March, 2002.
Lo, M.W. and Parker, J.S., “Unstable Resonant Orbits near Earth and Their Applications in Planetary Missions,”
AIAA/AAS Conference, Paper No. 5304, Providence, RI, August, 2004.
Anderson, R., M. Lo, “The Role of Invariant Manifolds in Low Thrust Trajectory Design (II)”, AIAA/AAS
Astrodynamics Specialist Conference, Providence, RI, Paper No. AIAA2004-5305, August 2004.
Szebehely, V., Theory of Orbits: The Restricted Problem of Three Bodies, Academic Press, New York, 1967.
Strömgren, E., “Connaissance actuelle des orbites dans le problème des trios corps,” Copenhagen Observatory
Publications No. 100; also Bull. Astr. Vol. 9, No. 87, 1935.
Hénon, M., “Exploration Numérique du Problème des Trois Corps, (I), Masses Egales, Orbites Périodiques,” Ann.
Astrophys., Vol. 28, No. 3, pp. 499-511, 1965.
Hénon, M., “Exploration Numérique du Problème des Trois Corps, (II), Masses Egales, Orbites Périodiques,” Ann.
Astrophys., Vol. 28, No. 6, pp. 992-1007, 1965.
Hénon, M., “Exploration Numérique du Problème des Trois Corps, (III), Masses Egales, Orbites Non
Périodiques,” Bull. Astron., Vol. 1, No. 1, pp. 57-80, 1966.
Hénon, M., “Exploration Numérique du Problème des Trois Corps, (IV), Masses Egales, Orbites Non
Périodiques,” Bull. Astron., Vol. 1, No. 2, pp. 49-66, 1966.
Hénon, M., “Numerical Exploration of the Restricted Problem. V., Hill’s Case: Periodic Orbits and Their
Stability,” Astron. & Astrophys., 1, 223-238, 1969.
Hénon, M., “New Families of Periodic Orbits in Hill’s Problem of Three Bodies,” Celestial Mech. & Dynamical.
Astr., Vol. 85, pp. 223-246, 2003.
Broucke, R.A., “Periodic Orbits in the Restricted Three-Body Problem with Earth-Moon Masses,” Technical
Report 32-1168, Jet Propulsion Laboratory, Cal. Tech., 1968.
Parker, T., L. Chua, “Practical Numerical Algorithms for Chaotic Systems”, Springer Verlag, New York, 1989.
Koon, W., M. Lo, J. Marsden, S. Ross, “Heteroclinic Connections”
ACKNOWLEDGEMENTS
This work has been completed under partial funding by the National Aeronautics and Space
Administration through Jet Propulsion Laboratory, California Institute of Technology; and by a National
Defense Science and Engineering Graduate (NDSEG) Fellowship sponsored by the Deputy Under
Secretary of Defense for Science and Technology and the Office of Naval Research.
16