Our dear teachers Madame Marsifah and Madame Aswita,
advertisement

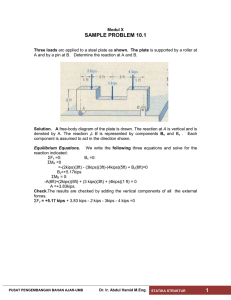
Modul II VECTORIAL REPRESENTATION OF HARMONIC MOTIONS The motion sustained by the sinusoidal excitation is called the steady -state vibration or the steady-state response. Hence the steady-state response must be at the excitation frequency regardless of the initial conditions or the natural frequency of the system. It will be shown in Chap. 2 that the steady-state response is described by the particular integral and the transient motion by the complementary function of the differential equation of the system. Resonance occurs when the excitation frequency is equal to the natural frequency of the system. No energy input is needed to maintain the vibrations of an undamped system at its natural frequency. Thus, any energy input will be used to build up the amplitude of the vibration, and the amplitude at resonance of an undamped system will increase without limit. where k2 is a constant. When the acceleration of a particle with rectilinear motion is always proportional to its displacement from a fixed point on the path and is directed towards the fixed point, the particle is said to have simple harmonic motion. It can be shown that the solution of Eq. (1-7) has the form of a sine and a cosine function with circular frequency equal to ω. It is convenient to represent a harmonic motion by means of a rotating vector X of constant magnitude X at a constant angular velocity ω. In Fig. 1-7, the displacement of P from the center O along the x axis (a) Vectorial representation PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 1 (b) Harmonic motions FIG. 1-7. Harmonic motions represented by rotating vector. In complex variables, the length of a vector is called the absolute value or modulus, and the phase angle is called the argument or amplitude. The length of the vector in this discussion is the amplitude of the harmonic motion. To avoid confusion, we shall use magnitude to denote the length of the vector. is OP = x(t)=X cosωt. This is the projection of the rotating vector X on the diameter along the x axis. Similarly, the projection of X on the y axis is OQ= y(t) = Xsin ωt. Naming the x axis as the "real" axis and the y axis as the "imaginary" one, the rotating vector X is represented by the equation: X = X cos ωt + jX sin ωt = Xeωt (1-9) where X is the length of the vector or its magnitude and j = v (-1) is called the imaginary unit. If a harmonic function is given as x(t) = X cos ωt, it can be expressed as x(t) = Re[Xejωt], here the symbol Re denotes the real part of the function Xeiait. Similarly, the function y(t) = Xsin ωt can be expressed as y(t} = Im[Xelωt!], where the symbol Im denotes the imaginary part of Xejωt. It should be remembered that a harmonic motion is a reciprocating motion. Its representation by means of a rotating vector is only a convenience. This enables the exponential function ejωtto be used in equations involving harmonic functions. The use of complex functions and complex numbers greatly simplifies the mathematical manipulations of this type of equations. In reality, all physical quantities, whether they are displacement, velocity, acceleration, or force, must be real quantities. The differentiation of a harmonic function can be carried out in its vectorial form. The differentiation of a vector X is PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 2 ………(1.10) Thus, each differentiation is equivalent to the multiplication of the vector by jω. Since X is the magnitude of the vector X, ω is real, and |j| = 1, each differentiation changes the magnitude by a factor of ωt. Since the multiplication of a vector by |j| is equivalent to advancing it by a phase angle of 90°, each differentiation also advances a vector by 90°. If a given harmonic displacement is x(t) = X cos ωt , the relations between the displacement and its velocity and acceleration are …………(1.11) These relations are identical to those shown in Eqs. (1-4) to (1-6). The representation of displacement, velocity, and acceleration by rotating vectors is illustrated in Fig. 1-8. PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 3 Since the given displacement x(t) is a cosine function, or along the real axis, the velocity and acceleration must be along the real axis. Hence the real parts of the respective vectors give the physical quantities at the given time t. Harmonic functions can be added graphically be means of vector addition. The vectors X1 and X2 representing the motions Xl cos ωt and X2 cos(ωt + α), respectively, are added graphically as shown in Fig. l-9(a). The resultant vector X has a magnitude X ( X 1 X 2 cos ) 2 ( X 2 sin ) 2 And a phase angle tan 1 sin X 1 X 2 cos with respect to X1. Since the original motions are given along the real axis, the sum of the harmonic motions is Re[X] = X cos(ωt + α). The addition operation can readily be extended to include the subtraction operation. Since both X1 and X2 are rotating with the same angular velocity ωt, only the relative phase angle of the vectors is of interest. It is convenient to assign arbitrarily ωt =0 as a datum of measurement of phase angles. The vector X 1 ,X2, and their sum X are plotted in this manner in Fig. 1-9(b). Note that the vector X2 can be expressed as ………(1.12) The quantity X2 = X2ejωt is a complex number and is called the complex amplitude or phasor of the vector X2. Similarly, X= Xejωt in Fig. 1-9(b) is the phasor of the vector X. Harmonic functions can be added algebraically by means of vector addition. Using the same functions x: = X1 cos ωt and X2 = X2 cos(ωt+ α), their vector sum is PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 4 Since the given harmonic motions are along the real axis, their sum is In representing harmonic motions by rotating vectors, it is often necessary to determine the product of complex numbers. The product can be found by expressing the complex numbers in the exponential form. For example, the product of the complex numbers A and B is ……….(1.13) where A = a a and B = b b are the magnitudes of the numbers and α =tan-1 a2/a1 and β = tan-1 b2/bl are their phase angles. Equation (1-13) indicates that 2 1 2 2 2 1 2 2 ……(1.14) AB = (phase of A) + (phase of B)…….. (1-15) Obviously, the multiplication operation can be generalized to include the division operation. PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 5 Example 2-1.Manipulation of Complex Numbers The last two examples indicate that the multiplication of a vector by j advances the vector –clockwise by a phase angle of 900 and a division by j retards it by 900. 1.6 Units Since there will be a change from the English engineering (customary) to the International System of Units (SI), the two systems of units will co-exist for some years. The student and the practicing engineer will need to know both systems. We shall briefly discuss the English units and then the SI units in some detail in this section. Newton's law of motion may be expressed as Force = (mass)(acceleration)…… (1-16) Dimensional homogeneity of the equation is obtained when the force is in pounds Ity, the mass in slugs, and the acceleration in ft/sec2. This is the English ft-lbpsec system in which the mass has the unit of Ibf-sec2/ft. A body falling under the influence of gravitation has an acceleration of g ft/sec2, where g=32.2 is the gravitational acceleration. Hence one pound-mass lbm exerts one pound-force lb; under the gravitational pull of the earth. In other words, 1 lbm weighs one pound on a spring scale. If a mass is given in pounds, lbm or weight, it must be divided by g to obtain dimensional homogeneity in Eq. (1-16). The in.-lbf-sec system is generally used in the study of vibrations. The gravitational acceleration is (32.2)(12) = 386 in./sec2. Hence the weight is divided by 386 in order to obtain dimensional homogeneity in Eq. (1-16). We assume that the gravitational acceleration is constant unless otherwise stated. In the derivation of equations, the mass m is assumed to have the proper units. PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 6 The International System of Units (SI) is the modernized version of the metric system. SI consists of (1) seven well-defined base units, (2) derived units, and (3) supplementary units. The base units are regarded as dimensionally independent. Those of interest in this study are the meter, the kilogram, and the second. The meter m is the unit of length. It is defined in terms of the wave-length of a krypton-85 lamp as "the length equal to 1 650 763.73 wave-lengths in vacuum of the radiation corresponding to the transition between the levels 2p10 and 5d5 of the krypton-86 atom." The kilogram kg is the unit of mass. The standard is a cylinder of platinum-indium, called the International Standard, kept in a vault at Sevres, France. The second s is the unit of time. It is defined in terms of the frequency of atomic resonators. "The second is the duration of 9 192631 770 PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 7 periods of the radiation corresponding to the transition between the two hyperfine levels of the ground state of the cesium-133 atom."* The derived units are formed from the base units according to the algebraic relations linking the corresponding quantities. Several derived units are given special names and symbols. The supplementary units form a third class of SI units. Examples of derived and supplementary units are shown in Tables l-2(a) and (&), respectively. The common prefixes for multiples and submultiples of SI units are shown in Table 1-3. Examples of conversion from the English to the SI units are given in Table 1-4. Note that a common error in conversion is to become ensnared in too many decimal places. The result of a computation cannot have any more significant numbers than that in the original data. For uniformity in the use of SI units, the recommendations* are: (1) In numbers, a period (dot) is used only to separate the integral part of numbers from the decimal part. Numbers are divided into groups of three to facilitate reading. For example, in defining the meter above, we have ". . . equal to 1 650 763.73 wave-lengths . . ." (2) The type used for symbols is illustrated in Table 1-2. The lower case roman type is generally used. If the symbol is derived from a proper name, capital roman type is used for the first letter. The symbols are not followed by a period. (3) The product of units is denoted by a dot, such as N • m shown in Table 1-2. The dot may be omitted if PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 8 there is no risk of confusion with another unit symbol, such as Nm but not mN. (4) The division of units may be indicated by a solidus (/), a horizontal line, or a negative power. For example, velocity in Table 1-2 can be expressed as m/s, —, or m • s. The solidus must not be repeated on the same line unless ambiguity is avoided by parentheses. For example, acceleration may be expressed as m/s2 or m • s-2 but not m/s/s. (5) The prefix symbols illustrated in Table 1-3 are used without spacing between the prefix symbol and the unit symbol, such as in mm. Compound prefixes formed by the use of two or more SI prefixes are not used. 1.7 Bentuk Exponential Dari Gamb.5,vektor A dpt ditulis: A x jy .....(1-17). Gamb.5. ,dari pers.(1) didpt : 1 Disini j x A cos(t ) y A sin( t ) yg bila disubstitusikan ke pers.(10) didpt: A Acos(t ) j sin( t ) ...(1-18). Dari hubungan : e j cos j sin ,maka A Ae j (t ) Ae j e jt A0 e jt ....(1-19). disini A0 Ae j disebut amplitudo komplek .Dlm bentuk bilangan komplek adalah: x A0 e jt ....(13) Contoh.2-2 Hitunglah amplitudo 6e j (t ) 2 dan.8e maksimum dari gabungan antara dua vektor yaitu j (t ) 6 Jawab. PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 9 Ambil t=0,sehingga ωt=0.Dan kalau diambil komponen datar dan tegak lurus yaitudari pers.(13) bahwa bagian riel: x A cos(t ) dan bagian imaginer: y A sin( t ) Dari ωt=0,maka α=π/2 dan α=π/6,maka x 6 cos / 2 8 cos / 6 8 cos 30 0 6.93 y 6 sin / 2 8 sin / 6 6 8 sin 30 0 10 Resultante: R= 10 2 6.932 12.2 ,dan besar sudut α: Tanα=10/6.93=1.443,maka 0 55 013' 55 13 360 0 Gabungan dari dua vektor tsb : j (t / 2 ) j (t / 6 ) 8e 6e 2 0.962 rad 12.2e j (t 0.962) Soal-soal latihan 2: 2-1.Tunjukkanlah bahwa komplek 5+j2 adalah bentuk dari Aej 2-2.Hitunglah: j / 6 j / 2 5e 7e 2-3. Sketch the motion described by each of the following equations: (a) x = 5e~2rsin(10irt + 7r/4) (b) x = 5<T2'sinC for 0<rsl.0s. 1-18 Express the following complex numbers in the exponential form Ae'°. (a) 1+jJl (e) 3/(V3-j) (b) -2 (I) (V3+j)(3 (c) 3/(V3-j) (g) (d) 5j (h) PUSAT PENGEMBANGAN BAHAN AJAR-UMB Dr. Ir. Abdul Hamid M.Eng. GETARAN MEKANIS 10