Asynchronous Implementation of 8051 Microcontroller
advertisement

Honor’s Thesis:
Asynchronous Implementation of 8051 Microcontroller
By: Ryan Mabry
Advisor: Dr. Hao Zheng
Abstract
The synchronous 8051 microcontroller is a common processor found in many
embedded systems. By using asynchronous design techniques, the performance of the
8051 microcontroller is increased. Through simulation and the use of existing
synchronous design tools in the asynchronous design flow, a four-phase handshaking
approach with a stoppable clock is simulated and then implemented. The asynchronous
architecture added to the existing synchronous architecture includes an ALU wrapper, a
controller wrapper, and a clocking element. The asynchronous design flow consists of
functional simulation, synthesis of synchronous blocks, timing analysis, asynchronous
wrapper design, and timing simulation. After implementation analysis, the asynchronous
8051 is 28.7% faster then the synchronous 8051 while only using 10% more area.
2
Acknowledgements
I would like to thank Narender Hanchate for devoting a significant amount of his
time in teaching me many of the tools that I used for this project.
I would also like to thank Dr. Hao Zheng for providing me with a thesis
opportunity that allowed me to exercise my hardware engineering design skills.
3
Table of Contents
Chapter 1: Motivation
5
Chapter 2: Overview and Design
7
Chapter 3: Design Flow
12
Chapter 4: Design Implementation and Results
15
Chapter 5: Challenges and Conclusion
25
Appendix A: Divmul Instructions
27
Appendix B: Controller, RAM, and Trace.out Contents
28
Appendix C: Primetime and Buildgates Script Files
42
Appendix D: ALU and Controller VHDL Code
44
4
Chapter 1: Motivation
Overview
The 8051 microcontroller is a device found in many embedded systems. It can be
found as a component in many analog to digital converters, pulse-width modulators, and
bus interfaces.
The 8051 microcontroller this project uses comes from the University of
California’s Dalton Project.1 The microcontroller design found on the Dalton Project
website is fully synchronous. The goal of this project is to develop an asynchronous
version of the 8051 microcontroller and use synchronous design tools in the process. The
divmul program from the Dalton Project website is used as a benchmark comparison
between the synchronous and asynchronous controllers, and it is also used in verifying
the asynchronous simulation results. The instructions executed by the divmul program
are listed in Appendix A.
Asynchronous Advantages
There are many reasons to implement a design using asynchronous techniques.
Asynchronous designs have the advantages over traditional synchronous designs of lower
power consumption, no clock skew, better technology migration, and less global timing
issues.2 There are numerous ways to implement an asynchronous circuit; these include
fundamental mode Huffman circuits, burst-mode circuits, and Muller circuits.
Asynchronous Disadvantages
While asynchronous circuits may be faster and are not subject to some of the
problems that synchronous circuits suffer from, they are much harder to design. While
there are many tools for synchronous design out on the market, there are no complete
design solution tools for asynchronous circuits. Since there is no global clock in
5
asynchronous designs, communication must be done through handshaking or other
means. Since there are no tools that automatically implement handshaking protocol
between communicating modules, if an asynchronous circuit makes extensive use of
handshaking or other asynchronous logic, great care must be taken to ensure timing and
data integrity.
Asynchronous Design Flow with Synchronous Tools
Even though complete asynchronous design solutions do not exist, one can make
use of existing synchronous design tools in the asynchronous design flow. In this flow,
each design is partitioned into blocks, and each block is controlled by a local clock or
handshaking protocol. Simulation tools like Modelsim can be used to simulate the
functionality of the asynchronous design. Once the design has been functionally
simulated, it must now be implemented. While an entire asynchronous circuit cannot be
designed in synchronous tools, individual logic blocks can. During the design of the
asynchronous 8051 chip, VHDL was used to generate certain blocks of the ALU and
controller wrappers. While timing analyzers like Primetime are used in the synchronous
design flow to look for timing and critical path violations, they can be used in the
asynchronous design flow to get delay numbers. With delay numbers from leading
commercial timing analyzers, delay elements or a local clock can be implemented.
6
Chapter 2: Overview and Design
Synchronous 8051 Architecture
Clock
rst
td
Op-code
I8051_DEC
I8051_ALU
addr
ip
Src-1
Src-2
Src-3
Carry-in 1 & 2
I8051_ROM
data
I8051_CTR
td
wr
addr
Is-bit-addr
data
Data-bit
des
Carry-out 1 & 2
Overflow
I8051_RAM
ALU-Op-code
(Rd, wr, addr, data_out, data_in)
Ports
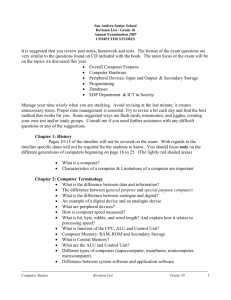
A block diagram of the synchronous 8051 architecture is shown above. The
controller retrieves data from the I8051_ROM module and sends this data to the
I8051_DEC module, where the data is decoded into an appropriate op-code for the
controller to execute. Depending on the decoded instruction, the I8051_CTR module will
assert and deassert the proper control signals to the I8051_ALU and I8051_RAM
module. During the execution phase of a particular instruction, the I8051_CTR module
will usually read data from the I8051_RAM module, send the fetched data to the
I8051_ALU module for an appropriate logical or arithmetic operation, then write the
results of the ALU operation back into the I8051_RAM module. If the 8051 needs to be
accessed by an external hardware device, such as a memory bus or another
7
microprocessor, the I8051_CTR and I8051_RAM modules feature ports that can
interface with the device.
8
Asynchronous 8051 Architecture
rst
td
Op-code
I8051_DEC
I8051_ALU
addr
ip
Src-1
Src-2
Src-3
Carry-in 1 & 2
I8051_ROM
data
I8051_CTR
td
wr
addr
Is-bit-addr
data
Data-bit
des
Carry-out 1 & 2
Overflow
I8051_RAM
ALU-Op-code
ALU
Wrapper
Clock
req
ack
Clocking
Element
CTR
Wrapper
(Rd, wr, addr, data_out, data_in)
Ports
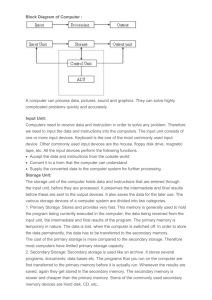
In the case of designing the asynchronous 8051 microcontroller, handshaking
between the ALU and controller is implemented along with a stoppable clock; while the
controller waits for the ALU to complete an operation, the clock is stopped.
In the synchronous version of the 8051 microcontroller, the ALU is the major
source of delay within the chip. RAM reads and writes and controller state transitions
occur much faster than an ALU division operation. The clock period in the synchronous
8051 microcontroller must be longer than the worst-case delay, which is the time needed
to execute ALU division. While most instructions take less time to execute than a
division instruction, the clock period must be long enough in every cycle to ensure that
no data or timing errors occur whenever a division instruction is executed. In the
asynchronous version of the chip, the clock period is dependent on the executed
instruction. For example, the clock period required for an add instruction is much less
9
than the required clock period for a division instruction. This functionality is
implemented through handshaking and a stoppable clock.
A block diagram of the asynchronous 8051 architecture is shown on the previous
page. The operation of the asynchronous microcontroller is similar to that of the
synchronous microcontroller, but with a few key differences. Unlike the synchronous
version, the clock is stopped while the I8051_CTR module waits for the I8051_ALU
module to execute a given operation; this is done through handshaking signals generated
by the ALU and Controller wrappers. Second, since the clock is stopped while the
controller waits for data from the ALU, excess cycles that were in the synchronous
version were eliminated in the asynchronous version; excess cycles are defined as clock
cycles where the controller is waiting for the ALU to complete an operation. Third, since
the clock is stopped while the controller waits for a given operation from the ALU to
complete, the clock must be generated onboard the chip, however, in the synchronous
design, the clock is generated off the chip.
The controller wrapper generates a request signal when the controller requests an
operation from the ALU. Upon receiving an acknowledge signal from the ALU wrapper,
the request signal is deasserted by the controller.
The ALU wrapper generates an acknowledge signal to signify that the ALU has
completed the operation requested by the controller. The delay between the time the
ALU wrapper receives the request signal from the controller wrapper and the time the
ALU wrapper acknowledges by asserting the acknowledge signal is dependent upon the
operation requested. The requested operation is determined by the ALU Op-Code.
10
The clocking unit is used to generate an onboard clock signal for the
asynchronous design. The behavior of the onboard clock is the same as an ordinary
clock, except that the clock is stopped whenever the request line is asserted and the
acknowledge line is deasserted. During this time, the controller is waiting for the ALU to
complete an operation. Once the ALU operation is complete and the ALU wrapper
asserts the acknowledge signal, the clock will resume normal operation.
11
Chapter 3: Design Flow
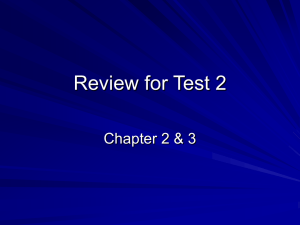
Asynchronous Design Flow
Functional Simulation
Synthesis of
Synchronous Blocks
Timing
Analysis
Asynchronous Wrapper
Design
Timing Simulation
One of the objectives of this project is to develop an asynchronous design flow
that utilizes synchronous tools. An overview of each design flow stage and how
synchronous tools are used follows.
The first step in the asynchronous design flow is functional simulation. Modelsim
is used to simulate the asynchronous design. Standard VHDL compilers, like Xilinx ISE,
Altera Quartus II, and NC VHDL, cannot synthesize VHDL code that implements
asynchronous logic. The wrappers for the ALU and controller were written in VHDL
and interfaced with the reduced controller. These wrappers use wait statements to
produce the handshaking logic that is necessary to stop the clock while the ALU
completes a given operation. Verification of the asynchronous controller was done
against the reduced synchronous controller by performing a memory dump at the end of
simulation. The contents of the RAM memory and controller registers were compared
and verified to be the same.
12
The second step in the asynchronous design flow is the synthesis of synchronous
blocks. In this stage, the synchronous 8051 microcontroller and synchronous elements of
the asynchronous 8051 microcontroller are synthesized and turned into Verilog netlists
by Ambit Buildgates. These netlists are used in later stages of the design flow.
The third step in the asynchronous design flow is timing analysis. In this stage,
Cadence Encounter and Synopsys Primetime are used. Cadence Encounter is used for the
generation of the Resistance-Capacitance model of a circuit. Synopsys Primetime is used
for static timing and critical path analysis. As successive elements of the ALU are
removed to determine the critical path delay for division, multiplication, addition,
subtraction, and logical operations, the RC network model for each case is generated in
Encounter and imported into Primetime to enhance timing accuracy. Critical path
numbers are also generated for the RAM, ROM, decoder, synchronous controller, and
asynchronous controller modules in this stage.
The fourth step in the asynchronous design flow is the design of the asynchronous
wrappers. Since the required delay numbers are obtained in stage four of the design flow
process, the correct number of delay elements can now be implemented in designing the
wrappers. The combinational logic elements of the wrappers are designed in
synthesizable VHDL code that is importable into a schematic, while the delay elements in
the ALU wrapper are laid out by hand in a schematic editor. The schematic editor used
during this project is Cadence Composer.
The fifth step in the asynchronous design flow is timing simulation.
Unfortunately, the asynchronous implementation of the 8051 microcontroller is unable to
13
be tested since the university does not have a post-synthesis timing simulator installed on
its servers.
14
Chapter 4: Design Implementation and Results
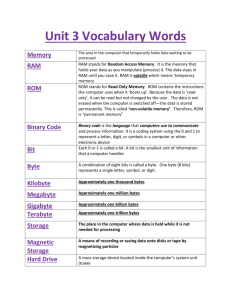
Handshaking
In the asynchronous implementation of the 8051 microcontroller, the
synchronization between the ALU and controller is implemented through four-phase
handshaking by the use of request and acknowledge signals. When the controller needs
an ALU operation to be done, the request signal is asserted. The acknowledge signal
from the ALU wrapper is then asserted after a given delay period, depending on the ALU
operation requested by the controller. During the period that the request signal is asserted
and the acknowledge signal is deasserted, the clock is stopped. The controller’s state
should remain the same as the ALU completes the requested operation. After the
acknowledge signal from the ALU wrapper is asserted, the request signal is deasserted by
the controller wrapper, then a short time later, the acknowledge signal from the ALU
wrapper is also deasserted. A figure showing how such handshaking and clocking works
is given below.
Req+
Stop Clock
Ack+
Start Clock
Ack-
Req-
15
Functional Simulation
The first step towards simulating an asynchronous microcontroller is to
implement its design in VHDL code. The controller is reduced so that it only implements
the instructions executed by the divmul program; the asynchronous controller is further
reduced by removing excess cycles. For example, in the reduced synchronous controller
the NOP instruction takes 7 clock cycles; in the reduced asynchronous controller, the
NOP instruction takes 3 clock cycles.
Wrappers for the ALU and controller are implemented in VHDL to be interfaced
with the asynchronous reduced controller. The controller wrapper consists of VHDL
code that generates a request signal for an appropriate ALU op-code. The ALU wrapper
consists of VHDL code that delays the generation of the acknowledge signal according to
the ALU operation.
Simulation verification in Modelsim consists of two phases. The first phase
compares the memory, registers, and trace.out of the fully synchronous 8051 model and
the asynchronous 8051 model that does not have any excess cycles removed, but does
have ALU and controller wrapper logic inserted. The trace.out file is a recording of each
instruction executed by the controller. As the simulation of both progresses, what is
written to and read from the 8051 RAM module in each clock cycle is dumped into a text
file. After these are verified to be the same, the controller register contents of both
designs are also confirmed to be correct. The trace.out file executed during simulation is
also the same.
The second phase consists of removing excess cycles from the asynchronous 8051
model that had ALU and controller wrapper logic inserted. Instead of comparing what
16
was written to and read from the 8051 RAM module in each cycle during simulation, a
dump of the RAM contents at the end of simulation is performed. VHDL code is
implemented to perform a dump of controller register contents at the end of simulation.
As excess cycles are removed from the asynchronous controller in each instruction case,
the contents of the RAM, controller registers, and trace.out are verified to be correct.
Appendix B gives the final correct controller register, ALU, and trace.out contents.
ALU Wrapper Design
Req
ALU
Opcode
Select
Logic
S2 S1 S0
Logical
Operations
Add
Subtract
Multiply
Divide
0
0
2to1
1 Mux
S0
1
2to1
Mux
S1
0
1
2to1 Ack
Mux
S2
A block diagram showing the ALU wrapper design is given above. The ALU
wrapper operates by selecting an appropriate delay element for a given ALU Op-code.
Signal req to ack connection is delayed for the amount of time it takes for the ALU to
complete the appropriate operation. The select logic takes the ALU Op-code as input and
generates appropriate signals for the select lines that control the multiplexers. The delay
elements for logical operations, addition and subtraction, multiply, and divide are
designed in such a way that the delay of one element builds upon the delay of the
previous element. For example, say logical operations have a delay of 9ns and addition
and subtraction operations have a delay of 12.8ns. The wrapper is designed so that
addition and subtraction delay has to pass through the 9ns delay element of logical
operations; thus, only an additional 3.8ns delay needs to be built into the addition and
subtraction delay element in order to meet the overall delay requirement for addition and
17
subtraction operations. This same design idea holds for the multiplication and divide
elements. The select logic VHDL code for the ALU wrapper is given in Appendix D.
Primetime is used to calculate the critical path through the ALU. In the
ALU, a virtual clock was created to drive all the inputs; this was necessary since
Primetime won’t generate critical path delay numbers without a defined clock. The RC
model for each particular ALU was extracted from Encounter and applied to Primetime
to enhance timing result accuracy.
In calculating ALU delay, successive operations are removed. For example, in
order to calculate multiplication delay, the division case from the ALU VHDL code is
removed, and the critical path delay is assumed to be that of multiplication. This process
continues until delay numbers for logical operations are achieved. Besides the explicit
divide, multiply, add, subtract, and logical operations, there are several ALU operations
that are placed into add or logical operations category based on the function they
performed. For example, the PCSADD ALU op-code is used in calculating address
offsets in jump instructions executed by the controller, and the PCUADD ALU op-code
is used in incrementing the program counter inside the controller; since both op-codes
make use of the addition function, these ALU operations are assumed to be part of the
addition delay.
Initial delay results from Primetime are given below. Since area is also a factor in
delay, the delay must be increased; the ALU decreased in size dramatically from division
to logical operations. In the entire ALU, logical operations may take significantly longer
then 6046ps; the added area from the division and multiplication functionality results in
an increased wire length between the input and output ports. Depending on how the
18
design is physically implemented on chip, the routing of the wires may impart more delay
then the rise and fall times of the transistors used in the actual logical operations.
ALU Ops
Division
Multiplication
Subtraction
Addition
Logical Operations
Delay(ps)
24675.8
10486.1
8579.21
6310.83
6046.16
In order to provide a safety margin to account for real world operating conditions
like voltage and temperature fluctuations, 50% of the initial delay is added to the initial
delay numbers. The correct numbers are given below. Since addition and subtraction
account for one delay element in the ALU wrapper, they are lumped together in the table
below.
ALU Ops
Division
Multiplication
Add & Subtract
Logical Operations
Delay(ps)
37000
15800
12800
9000
Now that the delay for each stage is set, an appropriate number of buffers had to
be placed in each stage in order to implement the required delay. The buffer unit is found
to have a delay of 110.28ps by itself after Primetime analysis. In order to simplify delay
element design, the buffer was rounded down to a delay of 100ps. The number of buffers
required for each delay element is given below; note that each successive delay element
builds upon the delay of the previous element.
ALU Ops
Division
Multiplication
Add & Subtract
Buffers
213
30
38
19
Logical Operations
90
After implementing the delay elements for division, multiplication, add &
subtract, and logical operations, they are wired together with the select logic block and
multiplexers. The wrapper is then exported into a Verilog netlist and imported into
Primetime to make sure the critical path delay in the wrapper is equal to the delay
required by division. Upon finishing Primetime analysis on the wrapper, it is found the
critical path had a delay of 42688.85ps. The difference in the expected and actual critical
path delay comes from the fact that the average delay of each buffer changed from
110.28ps to 114.28ps, and the buffer delay is simplified to 100ps during the design of the
wrapper. In order to bring the critical path delay closer to required specifications, 50
buffer elements are removed from the division delay element. After removing 50 buffers
from the division delay element, the critical path delay in the ALU wrapper is found to be
36975.75ps, which meets the required specifications. The final number of buffers in each
delay element is given below.
ALU Ops
Division
Multiplication
Add & Subtract
Logical Operations
Buffers
163
30
38
90
Controller Wrapper Design
ALU Op-code
Ack
CTR
Wrapper
Req
The design of the controller wrapper is much simpler then the ALU wrapper
design. All the controller wrapper does is assert a request signal while the controller is
20
waiting for data from an ALU operation; the request signal is deasserted once an
acknowledge signal from the ALU wrapper is received. The controller wrapper is
designed in VHDL code. The code for the controller wrapper can be seen in Appendix D.
Controller Modifications
In the case of the synchronous 8051 controller, the controller must wait an
appropriate number of clock cycles for a given instruction while a given ALU operation
is carried out. However, in the case of the asynchronous controller, these excess cycles
can be removed since the clock is stopped while the ALU is carrying out a requested
operation. For example, the ADDC_1 instruction executed by the controller takes 8
clock cycles in the synchronous version and 6 clock cycles in the asynchronous version.
The VHDL code for the ADDC_1 instruction in the asynchronous 8051 controller is on
the left, and the VHDL code for the ADDC_1 instruction in the synchronous 8051
controller is on the right. In the synchronous version, execute states ES_5 and ES_6 are
excess cycles since the controller is doing nothing while waiting for the ALU to complete
the add operation. In the asynchronous version, the excess cycles ES_5 and ES_6 can be
eliminated since the clock is stopped while the ALU completes the add operation.
when OPC_ADDC_1 =>
when OPC_ADDC_1 =>
case exe_state is
case exe_state is
when ES_0 =>
when ES_0 =>
GET_RAM_ADDR_1(v8);
GET_RAM_ADDR_1(v8);
START_RD_RAM(v8);
START_RD_RAM(v8);
exe_state <= ES_1;
exe_state <= ES_1;
when ES_1 =>
when ES_1 =>
exe_state <= ES_2;
exe_state <= ES_2;
when ES_2 =>
when ES_2 =>
alu_op_code <= ALU_OPC_ADD;
alu_op_code <= ALU_OPC_ADD;
alu_src_1 <= reg_acc;
alu_src_1 <= reg_acc;
alu_src_2 <= ram_in_data;
alu_src_2 <= ram_in_data;
alu_src_cy <= reg_cy;
alu_src_cy <= reg_cy;
exe_state <= ES_3;
exe_state <= ES_3;
when ES_3 =>
when ES_3 =>
21
ram_out_data <= alu_des_1;
ram_out_data <= alu_des_1;
START_WR_RAM(R_ACC);
START_WR_RAM(R_ACC);
reg_cy <= alu_des_cy;
reg_cy <= alu_des_cy;
reg_ac <= alu_des_ac;
reg_ac <= alu_des_ac;
reg_ov <= alu_des_ov;
reg_ov <= alu_des_ov;
exe_state <= ES_4;
exe_state <= ES_4;
when ES_4 =>
when ES_4 =>
GET_PSW(v8);
GET_PSW(v8);
ram_out_data <= v8;
ram_out_data <= v8;
START_WR_RAM(R_PSW);
START_WR_RAM(R_PSW);
exe_state <= ES_7;
exe_state <= ES_5;
when ES_7 =>
when ES_5 =>
SHUT_DOWN_ALU;
exe_state <= ES_6;
cpu_state <= CS_1;
when ES_6 =>
exe_state <= ES_0;
exe_state <= ES_7;
when others =>
when ES_7 =>
null;
SHUT_DOWN_ALU;
end case;
cpu_state <= CS_1;
exe_state <= ES_0;
end case;
RAM reads take 2 clock cycles and RAM writes take 1 clock cycle in both
synchronous and asynchronous controller versions.
Clocking Unit
req
ack
...
Inverter Chain
Clock
A diagram for the clocking unit design is shown above. Unlike the synchronous
8051 chip, the asynchronous 8051 chip must have its clock generated onboard because
the clock must be stopped and started by the handshaking signals from the ALU and
controller wrappers. The clocking element takes the request and acknowledge lines from
the two wrappers as inputs. The clock is stopped when signal req is 1 and signal ack is 0.
Signal req is asserted when the controller is waiting for the ALU to complete an
operation, and signal ack is asserted when the ALU has completed the requested
operation. Whenever the request and acknowledge lines are not one and zero at the same
22
time, the clock operates as any synchronous clock would. The purpose of the inverter
chain in the clocking unit is to modulate the clock period of the design. The inverter gate
at the lower input node to the AND gate in the clocking unit acts to change the clock
from zero to one and vice-versa during normal operation. The delay of this change to the
output clock port is dependant on the inverter chain. The delay in the inverter chain must
be longer than the longest critical path in the RAM, ROM, asynchronous controller, and
decoder modules to avoid timing violations. Since the length of the inverter chain
determines how often the clock will change from zero to one and vice-versa during
normal operation, it is equal to half the period of the clock.
After doing Primetime analysis, the module with the longest critical path in the
asynchronous 8051 is the RAM with a critical path of 20.6ns. Applying a 50% safety
margin to the critical path, a critical path delay of 30.9ns is obtained. Since an inverter
has a delay of 49.96ps, 682 inverters are necessary to create the inverter chain.
Targeted Technology
The asynchronous microcontroller design is targeted towards the standard cell
library developed by the Virginia Tech VLSI for Telecommunications. The VTVT
library is based on the TSMC 0.25u CMOS fabrication process.
Area and Speed
Area numbers were generated by pks_shell and delay numbers are generated in
Primetime. The area of the synchronous version is smaller then the asynchronous version
since the synchronous version does not have an onboard clock generator, ALU wrapper,
or Controller wrapper. The delay is the same in both versions since the RAM module
forms the longest critical path.
23
The cell area of the synchronous 8051 chip is 65662; the cell area of the
asynchronous chip is approximately 72400. The RAM module dominates the area of
both asynchronous and synchronous chips; this can be expected since the 128 bytes of
memory the 8051 has requires a large number of flip-flops.
The RAM module dominates the critical path delay in the asynchronous and
synchronous 8051 versions with a delay of 20.6ns. Applying a 50% safety margin to this
number, one obtains a critical path delay of approximately 30.9ns. This translates to a
clock period of 30.9ns and an operating frequency of 32.3 MHz for the synchronous and
asynchronous chip during normal operation when the clock is not stopped.
Even though the university lacks a post-synthesis timing simulator, one can gain a
rough estimate of performance by implementing the delay elements in behavioral VHDL
code in Modelsim. While the timing characteristics of each gate are not reflected in
Modelsim, it can model the behavior of the delay elements and asynchronous
handshaking logic through wait for and wait until statements. During simulation in
Modelsim, the divmul program took 221,390ns to execute on the synchronous 8051 and
172,030ns to execute on the asynchronous 8051. The asynchronous 8051 is 28.7% faster
than the synchronous 8051 in executing the divmul program.
24
Chapter 5: Challenges and Conclusion
Challenges
There were several difficulties encountered while designing the
asynchronous 8051 microcontroller. The most significant difficulty came in learning the
different tools that were used in the asynchronous design flow. While learning tools like
Cadence Encounter and Ambit Buildgates, technical assistance from people familiar with
the tools is readily available, however, while learning tools like Synopsys Primetime, the
sole resources available are the Internet and user manuals. By establishing what tools are
necessary for each stage in the asynchronous design flow, a great amount of time could
be saved. During the timing analysis stage of the design flow, Synopsys Primetime,
Design Analyzer, and Timemill are examined, and a large amount of time is spent
learning each tool. Ultimately, only Primetime proves useful in the search for accurate
delay numbers. The time spent learning Design Analyzer and Timemill is better utilized
in the later stages of the asynchronous design flow.
Conclusion
Even though the idea behind handshaking is very simple, it takes a lot of work to
change an existing synchronous design to an asynchronous design. The use of common
synchronous design tools in the asynchronous design flow makes the design of the
asynchronous 8051 microcontroller much easier.
While the asynchronous version is implemented in schematic form, it is
impossible to verify its correctness; no suitable post-synthesis timing simulators are
installed on university servers.
25
Works Cited
1. Dalton Project. http://www.cs.ucr.edu/~dalton/8051/. University of California,
Department of Computer Science, Riverside, CA 92521. 7 April 2005.
2. Scott Hauk, “Asynchronous Design Methodologies: An Overview,” in
Proceedings of the IEEE, Vol. 83, No. 1, pp. 69-93, January, 1995.
26
Appendix A – Executed divmul Instructions
ADD A, direct
ADDC A, Rn
CJNE RN, #data, rel
CLR A
DIV AB
DNJZ Rn, rel
INC Rn
JNZ rel
LCALL addr16
LJMP addr16
MOV A, Rn
MOV A, direct
MOV Rn, A
MOV Rn, direct
MOV Rn, #data
MOV direct, Rn
MOV direct, direct
MOV direct, #data
MOV @Ri, A
MUL AB
ORL A, Rn
RET
SJMP rel
XCH A, Rn
XCH A, direct
XRL A, #data
27
Appendix B – Controller, RAM, and Trace.out Contents
Characters after “--“ are just comments
Controller register contents at end of simulation:
00000
000
01110011
00101110
11111110
11111110
00000000
0
0
0
0
0
0
0
0
-- reg_pc_15_11
-- reg_pc_10_8
-- reg_pc_7_0
-- reg_op1
-- reg_op2
-- reg_op3
-- reg_acc
-- reg_cy
-- reg_ac
-- reg_f0
-- reg_rs1
-- reg_rs0
-- reg_ov
-- reg_nu
-- reg_p
28
RAM contents at end of simulation:
00000000
00000000
00000000
00000000
00000000
00001111
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00001010
00000000
00000000
00001101
00000000
00001101
00000000
10000010
00000000
10000110
00000000
00001010
00000000
00000100
01001001
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
-- sfr_b
-- sfr_acc
-- sfr_psw
-- sfr_ie
-- sfr_ip
-- sfr_sp
-- sfr_dpl
-- sfr_dph
-- sfr_scon
-- sfr_sbuf
-- sfr_tcon
-- sfr_tmod
-- sfr_tl0
-- sfr_th0
-- sfr_tl1
-- sfr_th1
-- RAM byte 0
-- RAM byte 1
-- RAM byte 2
-- RAM byte 3
-- RAM byte 4
-- RAM byte 5
-- RAM byte 6
-- RAM byte 7
-- RAM byte 8
-- RAM byte 9
-- RAM byte 10
-- RAM byte 11
-- RAM byte 12
-- RAM byte 13
-- RAM byte 14
-- RAM byte 15
-- RAM byte 16
-- RAM byte 17
-- RAM byte 18
-- RAM byte 19
-- RAM byte 20
-- RAM byte 21
-- RAM byte 22
-- RAM byte 23
-- RAM byte 24
-- RAM byte 25
-- RAM byte 26
29
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
-- RAM byte 27
-- RAM byte 28
-- RAM byte 29
-- RAM byte 30
-- RAM byte 31
-- RAM byte 32
-- RAM byte 33
-- RAM byte 34
-- RAM byte 35
-- RAM byte 36
-- RAM byte 37
-- RAM byte 38
-- RAM byte 39
-- RAM byte 40
-- RAM byte 41
-- RAM byte 42
-- RAM byte 43
-- RAM byte 44
-- RAM byte 45
-- RAM byte 46
-- RAM byte 47
-- RAM byte 48
-- RAM byte 49
-- RAM byte 50
-- RAM byte 51
-- RAM byte 52
-- RAM byte 53
-- RAM byte 54
-- RAM byte 55
-- RAM byte 56
-- RAM byte 57
-- RAM byte 58
-- RAM byte 59
-- RAM byte 60
-- RAM byte 61
-- RAM byte 62
-- RAM byte 63
-- RAM byte 64
-- RAM byte 65
-- RAM byte 66
-- RAM byte 67
-- RAM byte 68
-- RAM byte 69
-- RAM byte 70
-- RAM byte 71
-- RAM byte 72
30
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
-- RAM byte 73
-- RAM byte 74
-- RAM byte 75
-- RAM byte 76
-- RAM byte 77
-- RAM byte 78
-- RAM byte 79
-- RAM byte 80
-- RAM byte 81
-- RAM byte 82
-- RAM byte 83
-- RAM byte 84
-- RAM byte 85
-- RAM byte 86
-- RAM byte 87
-- RAM byte 88
-- RAM byte 89
-- RAM byte 90
-- RAM byte 91
-- RAM byte 92
-- RAM byte 93
-- RAM byte 94
-- RAM byte 95
-- RAM byte 96
-- RAM byte 97
-- RAM byte 98
-- RAM byte 99
-- RAM byte 100
-- RAM byte 101
-- RAM byte 102
-- RAM byte 103
-- RAM byte 104
-- RAM byte 105
-- RAM byte 106
-- RAM byte 107
-- RAM byte 108
-- RAM byte 109
-- RAM byte 110
-- RAM byte 111
-- RAM byte 112
-- RAM byte 113
-- RAM byte 114
-- RAM byte 115
-- RAM byte 116
-- RAM byte 117
-- RAM byte 118
31
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
-- RAM byte 119
-- RAM byte 120
-- RAM byte 121
-- RAM byte 122
-- RAM byte 123
-- RAM byte 124
-- RAM byte 125
-- RAM byte 126
-- RAM byte 127
32
Trace.out contents at end of simulation
NOP
LJMP
MOV 7
CLR 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
33
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
34
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
35
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
36
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
37
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 13
DJNZ 1
MOV 12
LJMP
MOV 12
MOV 7
CLR 1
MOV 5
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
38
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
39
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
INC 2
CJNE 3
INC 2
CJNE 3
MOV 1
XRL 4
ORL 1
JNZ
MOV 6
LCALL
CJNE 3
MOV 1
MOV 9
40
DIV
MOV 5
MOV 6
RET
MOV 9
MOV 6
LCALL
CJNE 3
MOV 1
MOV 9
DIV
MOV 5
MOV 6
RET
MOV 9
MOV 6
LCALL
MOV 1
MOV 5
MOV 9
MUL
MOV 5
MOV 1
XCH 2
XCH 1
MUL
ADD 1
41
Appendix C – Sample Primetime and Buildgates script files
Synchronous Controller Buildgates tcl script file:
read_tlf vtvtlib25.tlf
read_lef vtvtlib25.lef
read_vhdl i8051_lib.vhd i8051_ctr.vhd
do_build_generic
set_current_module I8051_CTR
do_optimize
write_Verilog -hier synch_controller_netlist.v
exit
Synchronous Controller Primetime tcl script file:
read_Verilog synch_controller_netlist.v
read_db vtvtlib25.db
set link_path "* vtvtlib25.db"
link_design
create_clock -name clk -period 2 -waveform {0 1} [get_ports clk]
set nonclock_inputs [remove_from_collection [all_inputs] [get_ports clk]]
set_input_delay 1 -clock clk $nonclock_inputs
set_output_delay 1 -clock clk [all_outputs]
set_driving_cell -lib_cell inv_1 [all_inputs]
set_load -pin_load 1 [all_outputs]
read_parasitics -format SPEF \ I8051_CTR.spef
report_timing > timing.txt
42
ALU Division Buildgates tcl script file:
read_tlf vtvtlib25.tlf
read_lef vtvtlib25.lef
read_vhdl i8051_lib.vhd i8051_alu.vhd
do_build_generic
set_current_module I8051_ALU
do_optimize
write_Verilog -hier i8051_ALU_division.v
exit
ALU Division Primetime tcl script file:
read_Verilog i8051_ALU_division.v
read_db vtvtlib25.db
set link_path "* vtvtlib25.db"
link_design
create_clock -name vclk -period 2 -waveform {0 1}
set_input_delay 1 -clock vclk [all_inputs]
set_output_delay 1 -clock vclk [all_outputs]
set_driving_cell -lib_cell inv_1 [all_inputs]
set_load -pin_load 1 [all_outputs]
read_parasitics -format SPEF \ I8051_ALU.spef
report_timing > timing.txt
43
Appendix D – ALU and Controller VHDL Code
ALU wrapper select logic VHDL code:
library IEEE;
use IEEE.STD_LOGIC_1164.all;
use IEEE.STD_LOGIC_ARITH.all;
use WORK.I8051_LIB.all;
entity ALU_wrapper is
port(
alu_op_code :
select0 : out
select1 : out
select2 : out
end ALU_wrapper;
in UNSIGNED(3 downto 0)
std_logic;
std_logic;
std_logic; );
architecture BEHAVIORAL of ALU_wrapper is
begin
process(alu_op_code)
begin
CASE alu_op_code IS
WHEN ALU_OPC_NONE =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_ADD =>
select0 <= '0';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_SUB =>
select0 <= '0';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_MUL =>
select0 <= '0';
select1 <= '0';
select2 <= '1';
WHEN ALU_OPC_DIV =>
select0 <= '0';
select1 <= '0';
select2 <= '0';
WHEN ALU_OPC_DA =>
select0 <= '0';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_NOT =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_AND =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
44
WHEN ALU_OPC_XOR =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_OR =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_RL =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_RLC =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_RR =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_RRC =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_PCSADD =>
select0 <= '0';
select1 <= '1';
select2 <= '1';
WHEN ALU_OPC_PCUADD =>
select0 <= '0';
select1 <= '1';
select2 <= '1';
WHEN others =>
select0 <= '1';
select1 <= '1';
select2 <= '1';
END CASE;
END PROCESS;
END BEHAVIORAL;
45
Controller Wrapper VHDL Code:
library IEEE;
use IEEE.STD_LOGIC_1164.all;
use IEEE.STD_LOGIC_ARITH.all;
use WORK.I8051_LIB.all;
entity CTR_wrapper is
port(
alu_op_code : in UNSIGNED(3 downto 0);
ack : in std_logic;
req : out std_logic);
end CTR_wrapper;
architecture BEHAVIORAL of CTR_wrapper is
begin
process(alu_op_code, ack)
begin
if ack = '1' then
req <= '0';
else
CASE alu_op_code IS
WHEN ALU_OPC_NONE =>
req <= '0';
WHEN ALU_OPC_ADD =>
req <= '1';
WHEN ALU_OPC_SUB =>
req <= '1';
WHEN ALU_OPC_MUL =>
req <= '1';
WHEN ALU_OPC_DIV =>
req <= '1';
WHEN ALU_OPC_DA =>
req <= '1';
WHEN ALU_OPC_NOT =>
req <= '1';
WHEN ALU_OPC_AND =>
req <= '1';
WHEN ALU_OPC_XOR =>
req <= '1';
WHEN ALU_OPC_OR =>
req <= '1';
WHEN ALU_OPC_RL =>
req <= '1';
WHEN ALU_OPC_RLC =>
req <= '1';
WHEN ALU_OPC_RR =>
req <= '1';
WHEN ALU_OPC_RRC =>
req <= '1';
WHEN ALU_OPC_PCSADD =>
req <= '1';
WHEN ALU_OPC_PCUADD =>
req <= '1';
WHEN others =>
req <= '0';
46
END CASE;
END IF;
END PROCESS;
END BEHAVIORAL;
47