3-7-nosov-corrected
advertisement

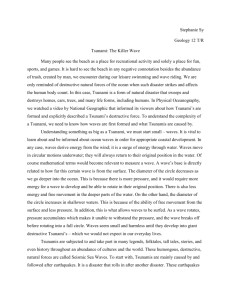
129 TSUNAMI GENERATION IN COMPRESSIBLE OCEAN OF VARIABLE DEPTH M.A. NOSOV, S.V. KOLESOV Physics of Sea and Inland Water Chair, Faculty of Physics, M.V. Lomonosov Moscow State University, Vorobjevy Gory, Moscow 119899 Russia Abstract This paper presents results of numerical modelling of tsunami waves generation by small bottom displacements in compressible ocean of variable depth. The problem is considered within the framework of the linear potential theory. Free surface disturbance, dynamic pressure distribution, and energy of compressible water layer for different bottom profiles are calculated and analyzed. 1. Introduction The role of water compressibility in the tsunami problem has been discussed many times [15]. It is well-known that submarine earthquakes can radiate not only gravitational but hydroacoustic waves (T-phase) [6]. However, in most cases, perhaps except very few studies [7, 8], tsunami is considered as a process in incompressible fluid. From the physical point of view [9], a fluid can be regarded as incompressible if / 1 ( is the fluid’s density). In case of time-independent motion, this condition is fully equivalent to the following one: (1) v c , where v is the mass velocity of fluid and c is the acoustic velocity in fluid. It is obvious that the problem of tsunami generation is timedependent; therefore, an additional condition must be satisfied. As related to the tsunami generation problem [13], the second condition is as follows: (2) H / c, L / c. Here, H is the depth of the ocean, L is a horizontal size of the source, and is the duration of bottom motion. Note that, in justifying the applicability of the theory of incompressible fluid to the description of tsunami, the second condition is usually ignored. The characteristic values of the above parameters are as follows: v ~ 1 m / s , c ~ 1500 m / s , H ~ 4000 m , L ~ 104 105 m , and ~ 1 100 s . One can see that the first condition is well satisfied, while the second condition can be broken in many cases. However, if a fast traveling motion, such as seismic waves or rupture formation (2000-6000 m/s), is taken as a tsunami source, then the first condition is also broken. It should be noted that, in problems of tsunami propagation and run-up, the first condition is well satisfied. The second condition assumes the form: T H / c, / c, where T is the period and is the wavelength of tsunami ( T ~ 10 2 10 4 s , ~ 10 4 10 5 m ). Thus, the second condition is also satisfied. In framework of linear potential theory of compressible fluid the problem of wave generation by small bottom displacements of finite duration was examined by us analytically in case of ocean of constant depth [10-13]. Major results for ocean of constant depth are as follows: independently on the time-spatial history of bottom displacements, the A. C. Yalçıner, E. Pelinovsky, E. Okal, C. E. Synolakis (eds.), Submarine Landslides and Tsunamis 129-137. @2003 Kluwer Academic Publishers. Printed in Netherlands 130 behavior of a compressible ocean differs from that of an incompressible one mostly by the formation of “fast” surface oscillations with the dominating period 4 H / c . In the source domain, the oscillations amplitude can be several times greater than the amplitude of bottom displacements. In this paper, particular features of the problem in case of ocean of variable depth are examined numerically. 2. Mathematical model Let us consider a layer of an ideal compressible homogeneous fluid in the field of gravity. The layer is bounded by free surface above and by absolutely rigid bottom below. The origin of the Cartesian coordinate system OXZ finds itself at the unperturbed free surface, and the OZ-axis is oriented vertically upward. The bottom position is set by function z b ( x, t ) H( x ) ( x , t ) , where H (x) is the depth, and ( x, t ) is the bottom displacements of small amplitude ( H ). It is assumed that a given point of the bottom moves in a given direction 0 ( 0 1 , 0 f ( x) ) with velocity U ( x, t ) . To find acoustic and gravitational waves generated by bottom displacements the following linear problem for the current velocity potential ( x, z, t ) is solved: xx zz c 2tt , (1) tt gz , z 0, (2) 0 , n ( x ) U( x , t ), z H( x ), n (3) c xt tt 0.5c zz 0, x x min , x max , 2 (4) where g is the acceleation of gravity, n (x ) is the normal to the bottom surface at given point x. All characteristics required to describe fluid behavior can be calculated using the potential [9]: the dynamic pressure p t , the fluid velocity v , the fluid particles displacements v dt , and the fluid surface displacement g 1t . z 0 3. FD scheme The following traditional explicit Finite Difference scheme (rectangular grid) is used for equation (1): t 2 tx, z1 2 tx , z tx, z1 c 2 ( tx 1, z 2 tx , z tx 1, z ) x 2 t 2 c2 ( tx , z 1 2 tx , z tx , z 1 ) z 2 (5) 131 where t is time increment, x and z are space increments. The condition for stability of the scheme is Courant criterion t min( x, z) c . In practice, the time increment was computed as follows: t 0.68 min( x, z) c . Formula (5) allows computing values of the current velocity potential in interior grid points. The values on the boundary are computed in accordance with equations (2)-(4) using the following schemes: free surface t 1 x,z 2 t x,z t 1 x,z gt 2 tx , 0 tx ,1 z , left and right boundaries (free pass condition) ct x 1t ,z1 1t , z 0t , z 20t , z 0t , z1 ct x t x 2 2 c t x 0t , z 1 20t , z 0t , z 1 , 2 2z t x ct x tN , z tN 1, z tN11, z 2tN , z tN,1z ct x t x c 2 t 2 x tN , z 1 2tN , z tN , z 1 , 2 2z t x 0t , z1 tN,1z bottom (5 cases) x , z x , z 1U x cos z (horizontal bottom), x , z x 1, z U x sin x (left vertical wall), x , z x 1, z U x sin x (right vertical wall), x , z 1 x 1, z tg U x cos( ) x 2 z 2 tg tg 2 1 (left slope), 2 x , z x , z x , z 1 x 1, z tg 2 U x cos( ) x 2 z 2 tg tg 2 1 (right slope), where tg z / x , is the angle between the normal n (x ) and the bottom movement direction 0 . 4. Verification of model Before practical calculations the numerical model was tested in respect of the following points: physical adequacy of results, efficiency of the free pass boundary condition, fulfillment of the energy conservation law, etc. Since the problem (1)-(3) have been solved analytically for ocean of constant depth [1013], in verification of the numerical model we could rely on exact analytical solutions. The 132 comparison of free surface displacements calculated analytically and numerically give us ground to state that numerical model compute amplitudes of both gravitational and acoustic waves with accuracy better than 1% if number of grid points between surface and bottom is more than 20. In case of variable depth the numerical model was tested in respect of gravitational waves only. A few numerical experiments show that in a basin with slightly sloping bottom, the wave amplitude changes exactly in accordance with the Green’s law A ~ H 1 / 4 . 5. Discussion of results In order to reduce number of initial parameters we choose rather simple bottom topography. Two domains of fixed depths H 1 and H 2 are connected by a slope of length L=80km. The depths H 1 and H 2 have range within 0.5 - 8.5 km ( H 1 H 2 ). Waves in fluid are generated by bottom displacements of duration . The displacements are in the direction of the normal n . The displacements duration range is 1 100 s . The increments for the FD scheme are determined as follows: x 800 m , z H1 / 20 , and t 0.68 z c . The calculating area and the governing law for bottom displacements are shown on Fig. 1. Fig. 2 demonstrates free surface disturbance generated by bottom displacements of duration =10 s. The disturbance is calculated at time t=1000 s. It incorporates both slow gravitational and fast acoustic modes (tsunami precursor). It is seen that the acoustic mode radiation directivity is strongly depended on bottom topography, whereas the gravitational mode is hardly sensitive to changes of bottom topography. Anyway the gravitational disturbance is also asymmetrical; the wave of larger amplitude propagates toward the shallow domain. Nevertheless, larger part of gravitational waves energy radiates in the deep domain. Figure 1. Bottom topography and time-spatial history of bottom displacements. 133 H1=0.5 km, H2=8.5 km H1=1 km, H2=8 km H1=2 km, H2=7 km H1=3 km, H2=6 km max H1=4 km, H2=5 km H1=4.25 km, H2=4.75 km H1=4.5 km, H2=4.5 km -1500 -1000 -500 0 500 1000 1500 x, km Figure 2. Free surface disturbance calculated for different bottom topography . Being a wave of significant amplitude in the deep part of the basin, acoustic tsunami precursor is not observed at the water surface in the shallow domain. It means that acoustic waves generated by bottom motions can not penetrate in the shallow regions. This point can be explained in terms of the normal mode theory. Compressible water layer bounded above by free surface and below by absolutely rigid bottom is a sound waveguide. Any disturbance in such waveguide can be considered as a superposition of the normal modes. The longest one has wavelength max 4 H , where H is the water layer thickens (depth). km km km km 134 0 -1 -2 -3 -4 0 -1 -2 -3 -4 0 -1 -2 -3 -4 -5 -6 -7 0 -1 -2 -3 -4 -5 -6 -7 -8 -200 -150 -100 -50 0 50 100 km 0 1 2 3 4 150 200 p max c v max Figure 3. Spatial distribution of maximum pressure amplitude. Bottom displacements of duration radiates wavelength c . Thus penetration of the acoustic waves in region where depth H is smaller than c / 4 is suppressed. Actually bottom motions generate a wide spectrum of acoustic waves, including components which 135 are short enough to reach near shore regions, where these waves can be registered as the Tphase. Examples of spatial distributions of the maximum dynamic pressure are shown on Fig. 3. In case of constant depth the distribution is symmetrical. The dynamic pressure reaches its maximum values near bottom, just above the source. Even for slightly sloping bottom (1:160) the distribution changes significantly. The maximum pressure area is tended to shift outside the source toward the deep domain, where the maximum pressure reaches value of 4 cvmax ( vmax is the maximum bottom velocity). At the same time the maximum dynamic pressure in the shallow region does not exceed relatively small value ~ 0.02 cvmax , which is mostly a contribution of the gravitational wave. This confirms the reasoning above that shallow domains are closed for penetration of the acoustic waves. During tsunami (or tsunami earthquakes) fish migration is often observed [14-16]. In particular, it was reported that some deepwater species have been found on beach or watched in the vicinity of water surface. Such fish behavior can be easily explained in terms of the maximum dynamic pressure distribution. Avoiding large pressure variations, fish migrates toward shallow regions or water surface. At calculation of the energy transferred from the moving bottom to the compressible water layer, the following components should be considered: v 2x v 2z dxdz 2 - kinetic energy; 2 1 p Wp 2 dxdz 2 c - elastic potential energy; Wk 2 Wg g dx 2 - gravitational potential energy. Also we determine the energy imparted to the water layer [9]: 2 W0 c dxdt t . An example of the time-history of the energy components is shown on Fig 4. After finishing of the bottom motions, total energy W Wk W p Wg remains a constant. It proves, that gravitational and elastic (acoustic) waves exist in the system inseparably. The normalized total water layer energy ( W /W0 ) is plotted as a function of the bottom displacement duration in Figure 5. If the duration is shorter than acoustic wave propagation time along the distance “bottom-surface-bottom” 2 H / c the value W is equal to W0 . Otherwise W W0 , moreover W depends on the duration non-monotonically. It is important to emphasize, that in the realistic range of the duration values (~10 s) the energy captured by water layer can changes considerably (more than one order of magnitude). Oscillatory character of the dependence in questions is a consequence of resonance features of compressible fluid with free surface on rigid bottom (quarter-wave resonator). The increase of the bottom slope “detunes” the resonator, and the dependence becomes smoother. In case of large values of the ratio W /W0 tends to go up. It can be explained in the following way. Value W0 is calculated as integrated acoustic energy flux, 136 W W0 0.8 W 0.6 Wk+Wp 0.4 Wk 0.2 Wp Wg 0 0 2 4 6 8 10 t 12 Figure 4. Example of the time-history of energy components. 10 H1=4.5 km, H2=4.5 km H1=3 km, H2=6 km H1=0.5 km, H2=8.5 km W W0 1 0.1 0.01 1 10 , s 100 Figure 5. Total water layer energy as a function of the bottom displacement duration. missing gravitational potential energy of “initial elevation”. At large , this gravitational potential energy becomes not negligible compared to the value W0 . This is why the right part of the curve deviates upward. Acknowledgements This work was supported by the Russian Foundation for Basic Research, project 01-0564547. 137 References 1. Sells, C.C.H. (1965), The effect of a sudden change of shape of the bottom of a slightly compressed ocean. Philos. Trans. R. Soc. A (London), no.1092, pp. 495-528. 2. Kajiura, K. (1970), Tsunami Source, Energy and the Directivity of Wave Radiation. Bull. Earthquake Res. Inst. Univ. Tokyo, Vol. 48, pp. 835-869. 3. Podyapolsky, G.S. (1970), Generation of the tsunami wave by earthquake. In: Tsunamis in the Pacific Ocean, Honolulu, pp.19-32. 4. Gusiakov, V.K. (1972), Excitation of Tsunami and Oceanic Rayleigh Waves under a Submarine Earthquake (in Russ.). Mathematical Problem in Geophysics, Novosibirsk, issue 3, pp.250-272. 5. Yanushaushkas, A.I. (1981), Cauchy-Poisson Theory for a Compressible Fluid (in Russ.). Tsunami propagation and run-up, Moscow, pp.41-55. 6. Fox, C.G. and Hammond, S.R. (1994), The VENTS Program T-Phase Project and NOAA's role in ocean environmental research. MTS Journal, 27(4), pp. 70-74. 7. Panza, F.G., Romanelli, F., Yanovskaya, T.B. (2000), Synthetic Tsunami Mareograms for Realistic Oceanic Models, Geophys. J. Int., 141, pp.498-508. 8. Ohmachi, T., Matsumoto, H., Tsukiyama, H. (2001), Seawater Pressure Induced by Seismic Ground Motions and Tsunamis. ITS 2001 Proceedings, Session 5, Number 5-4, pp.595-609. 9. Landau, L.D., Lifshitz, E.M. (1982), Fluid Mechanics, Oxford: Pergamon, 2 nd ed. 10. Nosov, M.A. (1999), A Model for Tsunami Generation by Bottom Movements Incorporating Water Compressibility, Volcanology and Seismology, 20, 731-741. 11. Nosov, M.A. and Sammer, K. (1998), Tsunami Excitation by a Moving Bottom Displacement in Compressible Water, Moscow University Physics Bulletin, 53, 67-70. 12. Nosov, M.A. (1999), Tsunami Generation in Compressible Ocean, Phys. Chem. Earth (B), 24, 437-441. 13. Nosov, M.A. (2000), Tsunami Generation in a Compressible Ocean by Vertical Bottom Motions, Izvestiya, Atmospheric and Oceanic Physics, 36, 718-726. 14. Soloviev, S.L. and Go, Ch.N. (1974), Catalog of Tsunamis on the Western shore of the Pacific Ocean (in Russian). Nauka, Moscow, 308 p. [Translated in 1984 by the Canadian Institute for Scientific and Technical Information, National Research Council, Ottawa, Canada, K1A 0S2]. 15. Soloviev, S.L. and Go, Ch.N. (1975) Catalog of Tsunamis on the Eastern Shore of the Pacific Ocean (in Russian). Nauka, Moscow, 203 p. [Translated in 1984 by the Canadian Institute for Scientific and Technical Information, National Research Council, Ottawa, Canada, K1A 0S2]. 16. Soloviev, S.L., Solovieva, O.N., Go, Ch.N., Kim, Kh.S., Shchetnikov, N.A. (2000), Tsunamis in the Mediterranean Sea 2000 B.C. - 2000 A.D. Dordrecht/Boston/London, Kluwer Academic Publishers, 237 p. 138