ECE 597 - Course Website Directory
advertisement

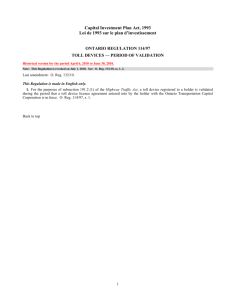
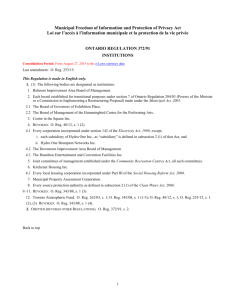
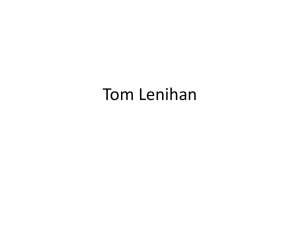
ECE 597 Spring 2006 Electronic Slide Whistle MIDI Controller Peter F. Klemperer May 9, 2006 1 Abstract: The purpose of this project is to create a MIDI controller which will allow a slide whistle like musical instrument to interface with a MIDI synthesizer. The instrument is designed in two parts, the mechanical instrument and the electronics to implement the MIDI interface. Introduction: The purpose of this project is to create a MIDI controller which will allow a slide whistle like musical instrument to interface with a MIDI synthesizer. The slide whistle is probably best known for its use in slapstick comedy and cartoons. This instrument has, however, been used in more serious musical compositions. According to Wikipedia, several notable performers, including Louis Armstrong, Paul Trietsch, have performed or recorded using this instrument. Furthermore, composers such as Maurice Ravel, Cornelius Cardew, Alberto Ginastra and several other have composed classical works employing the slide whistle. One significant motivation for the creation of the MIDI slide whistle is to allow disabled musicians to perform. This new musical instrument will expand the accessibility of MIDI synthesizers to a larger group of disabled musicians. The project will be composed of two parts, the electronic slide whistle and the MIDI controller interface. The electronic slide whistle will require two sensors, a breath sensor and a slide position sensor. A Xilinx FPGA serves as the basis of the MIDI controller to receive the instrument signals and convert them to MIDI format. 2 Design: The electronic slide whistle midi controller’s design can be broken down into two main assemblies. The physical slide whistle instrument body and the MIDI interface support circuitry. These assemblies are marked and can be clearly identified in figure 1. This document will first describe the physical instrument, then the analog electronics, and finally the FPGA VHDL. Instrument: The instrument consists of two major subparts. The slide determines the pitch of the sound output and the breath sensor which determines the loudness of the tone. These two components are mounted in a PVC housing designed and fabricated by the UIUC ECE Machine Shop. Caliper The caliper chosen is an Avenger products 6” digital caliper. This caliper is a low-cost model stocked by the ECE storeroom. There is a two wire serial interface which can be accessed through the interface port on the caliper body which was used in this product to interface with the FPGA. This caliper offers 24 bit precision through the serial interface 3 but is limited in its position update rate to roughly 300 ms update period. I would recommend this product for future projects requiring digital readout distance measurement, but not for applications which require accurate measurement in time, like this application. For future improvements on this project I would recommend using a caliper with a higher update rate as mentioned on this website: http://www.shumatech.com/support/chinese_scales.htm Calipers of this type can be obtained from the following distributor as well as pre-built serial adaptor cables: http://www.littlemachineshop.com/ Another alternative would be a quadrature encoder based approach which I feel is most appropriate as it can be used to provide near instantaneous measurement information. One supplier of linear quadrature encoders can be found here: http://www.usdigital.com/products/pes/ One final comment is that the sliding action is a large consideration for the slide whistles suitability for use as an actual instrument. The digital caliper does not have very smooth sliding action and made it difficult to reliably hit specific notes while playing. Breath Sensor The breath sensor used in this project is a Freescale Semiconductor MPXM2010GS 0-1 Psi gage pressure sensor. This pressure range is very appropriate for the human breath input. The sensor also has some ability to indicate negative pressure if the circuit is carefully designed. In future projects I would recommend this sensor for it’s suitability 4 as well as low cost. The mouthpiece design used in this project is a piece of 1 inch PVC underground sprinkler flexible tubing to hard tubing adapter available at Do It Best hardware store. Circuit: The circuitry can be divided into two major subparts: the analog circuitry and the FPGA VHDL. The analog circuitry includes the analog to digital circuitry and buffers for the breath sensor, the caliper line level adaptor circuit, and the MIDI output circuitry. The FPGA can be broken into four parts: the caliper serial to parallel, the MIDI serial interface, the breath sensor, and the pinout definition file (UCF). Analog-to-Digital and Buffer The analog to digital circuitry is the most complicated circuit in this project and is illustrated in figure 5. The initial opamp is used to convert the differential 0-40 mV output from the pressure sensor to the 0-5 V reference voltage required by the analog to digital converter in the next stage. A LM324N opamp was chosen for this application due to its ease of availability from the ECE electronics shop and its ability to operate in a wide range of voltages. The analog to digital converter is an ADC0841 which is operated in continuous operation mode. The schematic in figure 5 is taken directly from the datasheet. One drawback of this configuration is that the start on power up button must be pressed on initial startup of the device, this could be automated using the FPGA or 5 through some other circuit design. Finally this output was buffered before being input to the FPGA to assure that it met LVTTL specifications using a standard hex buffer, just about any choice will do and is probably unnecessary. An extremely steady supply voltage for the sensor is required as the differential voltage output from the sensor will be directly affected by the supply voltage fluctuations, and with only a few mV range, only a few mV fluctuation on the supply is acceptable. Caliper Line Level Circuitry The digital readout caliper is operated by a 1.5 volt battery and the serial output uses 0V and 1.5 V as the low and high logic levels respectively for the clock and data lines. A 1.5 V and ground voltage level reference is also provided in the output from the caliper. An opamp circuit is used to raise the signal voltages to zero and five volt levels required for the LVTTL interface standard to use with the FPGA. The circuit is illustrated in figure 4 and is directly connected to the pins of the FPGA. MIDI Output Circuitry The MIDI interface is a 5 mA current loop interface which uses 5-pin DIN standard cables. The circuit I was used was lifted from the schematic described on: http://www.cnmat.berkeley.edu/~norbert/midi/node6.html This circuit uses a 7417N buffer to interface with the FPGA output to the pin 5 of the din connector through a 220 ohm resistor. The third pin of the connector is connected to 6 ground and the fourth pin is connected to the five volt supply through another 220 ohm resistor. This interface is very simple to implement and works well with the Yamaha MIDI-to-USB adaptor. FPGA The FPGA circuitry consists of a Digilent D2 board containing an XC2S200 FPGA. This board has several output ports which provide an unregulated nine volt supply. This supply was tapped to a standard 7805 regulated supply to provide the five volt reference supply for the analog circuitry. The Xilinx ISE 8.1 tool flow was used for VHDL synthesis and bitfile download. VHDL: Breath Sensor The breath sensor VHDL is found in figure 5 but is very simple. It reorders the bits for correct data processing and sets a minimum threshold for output. This threshold had to be set very high as the supply noise on the pressure sensor was carrying all the way through to the FPGA and as a result, little tone volume modulation could be achieved. A better implementation might attempt to remove the supply noise using DSP techniques and I think this could be implemented relatively easily. Caliper Interpolation 7 The caliper output is a clock and data line and the signal is illustrated in figure 3. The VHDL describing the caliper input can be found in Figure 7. The clock line is monitored for a rising edge and the data lines value is stored. Each set of information consists of 48 bits, 24 bits of relative scale measurement and 24 bits of measurement in two’s compliment format with MSB first. The caliper output is limited to roughly three times per second, which sounds rather rough when played as an instrument and not a smooth continuous progression as one expects from a slide whistle. A simple linear interpolation scheme was implemented to provide 32 samples of the pitch instead of just 3 per second. This sounds much smoother but a higher update rate, probably close to the maximum capabilities of the MIDI standard would be a better choice. The combination of a quadrature encoder and some DSP will provide a much nicer solution. MIDI Serial Interface The MIDI interface VHDL is very simple with a single line serial. The 50 MHz clock is down clocked by a factor of 1600 to provide the correct bit rate for the MIDI standard. Then a sort of circular shift register is used to push the MIDI data out over the line. Figure 6 contains the VHDL for this design. The MIDI sequence that is sent is: Note off Note On Note Number Velocity 8 Pitch Bend The note number is determined from the first 12 bits of the caliper’s 24 bit output and the pitch bend is determined from the remaining 12 bits. The velocity is received from the breath sensor’s VHDL block. The note number of the previous note is stored so that it can be shut off before the next note begins to provide a smooth transition. It is important when using this type of scheme that the MIDI synthesizer has a “legato” mode which helps create smooth note transitions or else using sample which have no attack so that the transitions are masked. This MIDI signal is then picked up by the Yamaha MIDI-to-USB adaptor. A few good free programs can be used to debug the MIDI interface in windows. One program is called “MIDI Input Viewer” which is a bit buggy but provides a great graphical view of the incoming MIDI stream. For a synthesizer I would recommend the demonstration version of the program called “Pro-53” which can also be found online and provides a pleasing slide whistle sound and a good “glide” mode. FPGA Pinout Definitions The FPGA pinout definitions used in this project can be found in figure 8. The UCF file shows that I used LVTTL levels for input and output. The FPGA cannot source or sink very much current and buffers should be used to protect the delicate circuitry. Xilinx datasheets for the Spartan 2 should help in the selection of a voltage level standard if LVTTL will not work in future applications. 9 Figure 1: Slide Whistle System Overview 10 Figure 2: Breath Sensor Diagram 11 Figure 3: Caliper Serial Output Figure 4: Caliper Circuit 12 Figure 5: slidewhistle.vhd ----------------------------------------------------------------------------------- Company: -- Engineer: --- Create Date: 20:01:08 04/17/2006 -- Design Name: -- Module Name: slidewhistle - Behavioral -- Project Name: -- Target Devices: -- Tool versions: -- Description: --- Dependencies: --- Revision: -- Revision 0.01 - File Created -- Additional Comments: ----------------------------------------------------------------------------------library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.STD_LOGIC_ARITH.ALL; use IEEE.STD_LOGIC_UNSIGNED.ALL; ---- Uncomment the following library declaration if instantiating ---- any Xilinx primitives in this code. library UNISIM; use UNISIM.VComponents.all; entity slidewhistle is Port ( atod : in STD_LOGIC_VECTOR (7 downto 0); caliper : in STD_LOGIC_VECTOR (1 downto 0); led : out STD_LOGIC_VECTOR (7 downto 0); midi : out STD_LOGIC; rst : in STD_LOGIC; brdled : out STD_LOGIC; clk : in STD_LOGIC); end slidewhistle; architecture Behavioral of slidewhistle is component midiComp Port ( rst : in std_logic; clk : in std_logic; note : in std_logic_vector(7 downto 0); midi: out std_logic; velocity : in std_logic_vector(6 downto 0); pitch : in std_logic_vector(11 downto 0)); end component; component bufgp Port ( I : in std_logic; O : out std_logic ); end component; component caliperComp Port ( clk : in STD_LOGIC; rst : in STD_LOGIC; caliperclk : in STD_LOGIC; caliperdata : in STD_LOGIC; width : out STD_LOGIC_VECTOR (15 downto 0); note : out STD_LOGIC_VECTOR (7 downto 0); pitch : out STD_LOGIC_VECTOR(11 downto 0)); end component; signal clkcount : std_logic_vector(23 downto 0); signal rst_buf : std_logic; signal pitch : std_logic_vector(11 downto 0); 13 signal signal signal signal begin note : std_logic_vector(7 downto 0); caliperWidth : std_logic_vector(15 downto 0); velocity : std_logic_vector(6 downto 0); atod_1, atod_2, atod_3, atod_0, atod_sum, atod_avg : std_logic_vector(7 downto 0); midi0 : midiComp port map ( rst => rst_buf, clk => clk, note => note, midi => midi, velocity => velocity, pitch => pitch); caliper0 : caliperComp port map ( clk => clk, rst => rst_buf, caliperclk => not caliper(0), caliperdata => not caliper(1), width => caliperWidth, note => note, pitch => pitch); RESETBUF : BUFGP port map( I=>rst, O=>rst_buf ); --led(1) <= caliper(1); --led(0) <= caliper(0); --led(5 downto 2) <= caliperWidth(15 downto 12); --led(7 downto 2) <= not caliperWidth(5 downto 0); --led(1 downto 0) <= not caliper(1 downto 0); --led(0 to 7) <= caliperWidth(15 downto 8); led(0) <= caliperWidth(10); led(1) <= caliperWidth(9); led(2) <= caliperWidth(8); led(3) <= caliperWidth(7); led(4) <= caliperWidth(6); led(5) <= caliperWidth(5); led(6) <= caliperWidth(4); led(7) <= caliperWidth(3); --led <= note; --led <= X"F0"; --led(6 downto 0) <= not note(6 downto 0); --led <= not atod; process( clk, rst_buf ) begin if rst_buf = '1' then clkcount <= X"000000"; brdled <= '0'; else if clk'event and clk = '0' then ------------------- if( clkcount <= X"00000F" ) then atod_3(0) <= not atod(7); atod_3(1) <= not atod(6); atod_3(2) <= not atod(5); atod_3(3) <= not atod(4); atod_3(4) <= not atod(3); atod_3(5) <= not atod(2); atod_3(6) <= not atod(1); atod_3(7) <= not atod(0); atod_2 <= atod_3; atod_1 <= atod_2; atod_0 <= atod_1; atod_sum <= atod_3 + atod_2 + atod_1 + atod_0; atod_avg <= "00" & atod_sum(7 downto 2); clkcount <= X"000000"; else clkcount <= clkcount + 1; end if; 14 if( atod < "00110000" ) then velocity <= not atod(6 downto 0); else velocity <= "0000000"; end if; end if; end if; end process; end Behavioral; 15 Figure 6: midi.vhd ----------------------------------------------------------------------------------- Company: -- Engineer: --- Create Date: 20:45:33 04/17/2006 -- Design Name: -- Module Name: midi - Behavioral -- Project Name: -- Target Devices: -- Tool versions: -- Description: --- Dependencies: --- Revision: -- Revision 0.01 - File Created -- Additional Comments: ----------------------------------------------------------------------------------library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.STD_LOGIC_ARITH.ALL; use IEEE.STD_LOGIC_UNSIGNED.ALL; ---- Uncomment the following library declaration if instantiating ---- any Xilinx primitives in this code. --library UNISIM; --use UNISIM.VComponents.all; entity midiComp is Port ( clk : in rst : in STD_LOGIC; STD_LOGIC; note : in STD_LOGIC_VECTOR(7 downto 0); pitch: in STD_LOGIC_VECTOR(11 downto 0); velocity : in std_logic_vector(6 downto 0); midi : out STD_LOGIC); end midiComp; architecture Behavioral of midiComp is signal midipointer : natural; signal midiclock : std_logic_vector(11 downto 0); signal midistream : std_logic_vector(89 downto 0); signal pitchbend : std_logic_vector(15 downto 0); signal velocity_on : std_logic_vector(6 downto 0); signal note_on, note_off : std_logic_vector(7 downto 0); begin process( rst, clk ) begin if rst = '1' then midi <= '1'; midipointer <= 0; midiclock <= X"000"; -note off note vel note # note on -midistream <= "1011001000" & "1" & note & "0" & "1100000000" & "1011001000" & "1" & note & "0" & "1100100000"; -midistream <= "1100000000" & "1011001000" & "1" & note_off & "0" & "1100100000" & "1011001000" & "1" & note & "0"; midistream <= "1" & pitchbend(15 downto 8) & "0" & "1" & pitchbend(7 downto 0) & "0" & "1111000000" & "1011001000" & "1" & note_on & "0" & "1100100000" & "1011001000" & "1" & note_off & "0" & "1100000000"; else if clk'event and clk = '0' then 16 -midistream <= "1100000000" & "1011001000" & "1" & note_old & "0" & "1100100000" & "1011001000" & "1" & note & "0"; -midistream <= "1011001000" & "1" & note_on & "0" & "1100100000" & "1011001000" & "1" & note_off & "0" & "1100000000"; midistream <= "10" & "10" & pitchbend(15 downto 11) & "0" & "10" & pitchbend(10 downto 4) & "0" & "1111000000" & -midistream <= "10" & "1000000" & "0" & "10" & "0000001" & "0" & "1111000000" & "10" & velocity_on & "0" & "1" & note_on & "0" & "1100100000" & "1011001000" & "1" & note_off & "0" & "1100000000"; if midipointer < 90 then midi <= midistream(midipointer); else midi <= '1'; end if; if midiclock = X"000" then if midipointer >= 2000 then midipointer <= 0; pitchbend <= pitch & "0000"; note_off <= note_on; note_on <= note; velocity_on <= velocity; else midipointer <= midipointer + 1; end if; end if; if midiclock > 1650 then midiclock <= X"000"; else midiclock <= midiclock + 1; end if; end if; end if; end process; end Behavioral; 17 Figure 7: caliper.vhd ----------------------------------------------------------------------------------- Company: -- Engineer: --- Create Date: 10:11:30 04/18/2006 -- Design Name: -- Module Name: caliper - Behavioral -- Project Name: -- Target Devices: -- Tool versions: -- Description: --- Dependencies: --- Revision: -- Revision 0.01 - File Created -- Additional Comments: ----------------------------------------------------------------------------------library IEEE; use IEEE.STD_LOGIC_1164.ALL; use IEEE.STD_LOGIC_ARITH.ALL; use IEEE.STD_LOGIC_SIGNED.ALL; ---- Uncomment the following library declaration if instantiating ---- any Xilinx primitives in this code. --library UNISIM; --use UNISIM.VComponents.all; entity caliperComp is Port ( clk : in STD_LOGIC; rst : in STD_LOGIC; caliperclk : in STD_LOGIC; caliperdata : in STD_LOGIC; width : out STD_LOGIC_VECTOR (15 downto 0); note : out STD_LOGIC_VECTOR (7 downto 0); pitch : out STD_LOGIC_VECTOR( 11 downto 0)); end caliperComp; architecture Behavioral of caliperComp is signal caliperclk_deb : std_logic_vector(127 downto 0); signal caliperclk_debounced : std_logic; signal caliperclk_old : std_logic; signal data_reg : std_logic_vector(49 downto 0); signal data_reg_hold : std_logic_vector(23 downto 0); signal data_reg_hold_old, data_reg_hold_new, data_reg_hold_new_temp, data_reg_hold_temp, data_reg_hold_temp2 : std_logic_vector(47 downto 0); signal data_reg_pointer : natural; signal pitch_scaler_old : std_logic; signal data_reg_scaler : std_logic_vector(31 downto 0); begin width(15 downto 0) <= data_reg_hold(23 downto 8); --width(0) <= caliperclk_debounced; process( data_reg_hold, rst ) begin if rst = '1' then note <= X"2B"; else -if data_reg_hold(15 downto 0) > X"FFFF" then -note <= X"33"; -else -note <= X"3C"; -end if; 18 if data_reg_hold(23 downto 12) < "0000000" then note <= X"33"; pitch <= "000000000000"; else note <= X"33" + data_reg_hold(20 downto 13); pitch <= data_reg_hold(12 downto 1); --pitch <= "000000000000"; end if; end if; end process; process(rst, clk) begin if rst = '1' then data_reg <= X"000000000000" & "00"; data_reg_hold <= (others=>'0'); data_reg_pointer <= 0; caliperclk_deb(7 downto 0) <= (others=>caliperclk); caliperclk_old <= caliperclk; else if clk'event and clk = '1' then caliperclk_deb(127 downto 0) <= caliperclk_deb(126 downto 0) & caliperclk; caliperclk_old <= caliperclk_debounced; pitch_scaler_old <= data_reg_scaler(20); if( data_reg_scaler = X"00000000" ) then data_reg_hold_temp <= X"000000" & (data_reg_hold_new(23 DOWNTO 0) - data_reg_hold_old(23 DOWNTO 0)); -data_reg_hold_new_temp <= data_reg_hold_old; DATA_REG_HOLD <= DATA_REG_HOLD_OLD(23 DOWNTO 0); -data_reg_hold <= data_reg_hold_temp(47 downto 24) + data_reg_hold_new_temp(23 downto 0); elsif( data_reg_scaler = X"001156EB" ) then -- 1 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"002FAF08" ) then -- 2 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"003404C1" ) then -- 3 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00455BAC" ) then -- 4 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"0056B297" ) then -- 5 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00680982" ) then -- 6 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"0079606D" ) then -- 7 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"008AB758" ) then -- 8 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"009C0E43" ) then -- 9 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00AD652E" ) then -- 10 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00BEBC19" ) then -- 11 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00D01304" ) then -- 12 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); 19 elsif( data_reg_scaler = X"00E169EF" ) then -- 13 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"00F2C0DA" ) then -- 14 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); elsif( data_reg_scaler = X"010417C5" ) then -- 15 DATA_REG_HOLD <= DATA_REG_HOLD + DATA_REG_HOLD_TEMP(23 DOWNTO 4); end if; if( data_reg_scaler = X"017D7840" ) then data_reg_scaler <= X"00000000"; data_reg_hold_new <= data_reg_hold_temp2; data_reg_hold_old <= data_reg_hold_new; else data_reg_scaler <= data_reg_scaler + 1; end if; if caliperclk_deb = X"FFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFF" then caliperclk_debounced <= '1'; elsif caliperclk_deb = X"0000000000000000" then caliperclk_debounced <= '0'; else caliperclk_debounced <= caliperclk_debounced; end if; if caliperclk_debounced /= caliperclk_old and caliperclk_debounced = '1' then -- data_reg_hold(15 downto 0) <= data_reg_hold(15 downto 0) + 1; data_reg(data_reg_pointer) <= caliperdata; if data_reg_pointer >= 48 then data_reg_hold_temp2(23 downto 0) <= not data_reg(48 downto 25); -- data_reg_hold(15 downto 0) <= not data_reg_hold(15 downto 0); data_reg_pointer <= 0; else data_reg_pointer <= data_reg_pointer + 1; end if; end if; end if; end if; end process; end Behavioral; 20 Figure 8: slidewhistle.ucf #PACE: Start of Constraints generated by PACE #PACE: Start of PACE I/O Pin Assignments NET "atod<0>" LOC = "P102" | IOSTANDARD = LVTTL ; NET "atod<1>" LOC = "P110" | IOSTANDARD = LVTTL ; NET "atod<2>" LOC = "P112" | IOSTANDARD = LVTTL ; NET "atod<3>" LOC = "P113" | IOSTANDARD = LVTTL ; NET "atod<4>" LOC = "P115" | IOSTANDARD = LVTTL ; NET "atod<5>" LOC = "P120" | IOSTANDARD = LVTTL ; NET "atod<6>" LOC = "P122" | IOSTANDARD = LVTTL ; NET "atod<7>" LOC = "P126" | IOSTANDARD = LVTTL ; NET "brdled" LOC = "P71" ; NET "caliper<0>" LOC = "P101" | IOSTANDARD = LVTTL ; NET "caliper<1>" LOC = "P99" | IOSTANDARD = LVTTL ; NET "clk" LOC = "P80" ; NET "led<0>" LOC = "P73" | IOSTANDARD = LVTTL ; NET "led<1>" LOC = "P75" | IOSTANDARD = LVTTL ; NET "led<2>" LOC = "P82" | IOSTANDARD = LVTTL ; NET "led<3>" LOC = "P86" | IOSTANDARD = LVTTL ; NET "led<4>" LOC = "P87" | IOSTANDARD = LVTTL ; NET "led<5>" LOC = "P89" | IOSTANDARD = LVTTL ; NET "led<6>" LOC = "P94" | IOSTANDARD = LVTTL ; NET "led<7>" LOC = "P96" | IOSTANDARD = LVTTL ; NET "midi" LOC = "P74" | IOSTANDARD = LVTTL ; NET "rst" LOC = "P77" ; #PACE: Start of PACE Area Constraints #PACE: CONFIG CONFIG CONFIG CONFIG CONFIG CONFIG CONFIG CONFIG Start of PROHIBIT PROHIBIT PROHIBIT PROHIBIT PROHIBIT PROHIBIT PROHIBIT PROHIBIT PACE Prohibit Constraints = P125; = P114; = P111; = P109; = P84; = P95; = P98; = P100; #PACE: End of Constraints generated by PACE 21