Thermodynamic Pareto Optimization of Turbojet Engines using Multi
advertisement

Multi-objective Genetic Algorithms for Thermodynamic Optimization of Turbojet
Engines
a
K. Atashkari, aN. Nariman-zadeh , bX. Yao, aA. Pilechi
a
Department of Mechanical Engineering,Engineering Faculty, The University of Guilan
P.O. Box 3756, Rasht, IRAN
b
School of Computer Science, The University of Birmingham
Edgbaston, Birmingham B15 2TT, U.K.
Abstract:- A multi-objective genetic algorithm (GAs) is used for Pareto based optimization of thermodynamic
cycle of ideal turbojet engines considering different pairs of objective functions, namely, specific thrust (ST),
specific fuel consumption (SFC), propulsive efficiency (p), and thermal efficiency (t) for two-objective
optimization processes. This provides the best Pareto front of different two-objective optimization from the
space of design variables, which are Mach number and pressure ratio, to the space of the above-mentioned
objective functions. In this way, a new diversity preserving algorithm is proposed to enhance the performance
of multi-objective evolutionary algorithms (MOEAs) in optimization problems with multi-objective functions.
Key-Words:- Thermodynamics, Pareto Optimization, Jet Engines, Multi-objective Optimization, Genetic
Algorithms.
solutions that are non-dominated to each other but
are superior to the rest of solutions in search space.
1 Introduction
This means that it is not possible to find a single
In the optimization of complex real-world problems,
solution to be superior to all other solutions with
there are several objective functions or cost
respect to all objectives. In other words, changing
functions (a vector of objectives) to be optimized
the vector of design variables in such Pareto front
(minimized
or
maximized)
simultaneously.
consisting of these non-dominated solutions could
Optimization in engineering design has always been
not lead to the improvement of all objectives
of great importance and interest particularly in
simultaneously. Consequently, such change leads to
solving complex real-world design problems.
deteriorating of at least one objective to an inferior
Recently, some heuristic optimization methods such
one. Thus, each solution of the Pareto set includes at
as Genetic Algorithms (GAs) have been used
least one objective inferior to that of another
extensively for such real-world optimisation
solution in that Pareto set, although both are
problems. Such nature-inspired evolutionary
superior to others in the rest of search space. It must
algorithms [1-2] differ from other traditional
be noted that this non-dominancy does exist in
calculus based techniques. The population-based
different levels, forming different ranked Pareto
approach of evolutionary algorithms is very fruitful
fronts, although the first Pareto front is the most
to solve many real-world optimal design or decision
important and will be the ultimate solution. The
making problems which are indeed multi-objective
inherent parallelism in evolutionary algorithms
optimization issues. In these problems, there are
makes them suitably eligible for solving MOPs.
several objective or cost functions (a vector of
There has been a growing interest in devising
objectives) to be optimized (minimized or
different evolutionary algorithms for MOPs. Among
maximized) simultaneously. These objectives often
these methods, the Vector Evaluated Genetic
conflict each other so that improving one of them
Algorithm (VEGA) proposed by Schaffer [2],
will deteriorate another objective function.
Fonseca and Fleming’s Genetic Algorithm (FFGA)
Therefore, there is no single optimal solution as the
[2], Non-dominated Sorting Genetic Algorithm
best with the respect to all the objective functions.
(NSGA) by Srinivas and Deb [1], and Strength
Instead, there is a set of optimal solutions, well
Pareto Evolutionary Algorithm (SPEA) by Zitzler
known as Pareto optimal solutions or Pareto front,
and Thiele [2], and the Pareto archived evolution
which distinguishes significantly the inherent
strategy (PEAS) by Knowles and Corne [2] are the
natures between single-objective and multimost important ones. A very good and
objective optimization problems. The concept of
comprehensive survey of these methods has been
Pareto front or set of optimal solutions in the space
presented in [2]. Basically, both NSGA and FFGA
of
objective
functions
in multi-objective
as Pareto-based approaches use the revolutionary
optimization problems (MOPs) stands for a set of
non-dominated sorting procedure originally
proposed by Goldberg [3]. Besides, the diversity
issue and the lack of elitism was also a motivation
for modification of that algorithm to NSGA-II [4] in
which a direct elitist mechanism, instead of sharing
mechanism, has been introduced to enhance the
population diversity. This modified algorithm has
been known as the state-of-the-art in evolutionary
MOPs. A comparison study among SPEA and other
evolutionary algorithms on several problems and
test functions showed that SPEA clearly
outperforms the other multi-objective EAs [2].
Some further investigations developed in reference
[5] demonstrated, however, that the elitist variant of
NSGA (NSGA-II) equals the performance of SPEA.
The thermal systems, like many other real-world
engineering design problems, are highly complex,
non-convex, and multi-objective in nature [6]. The
objectives in thermal systems are usually conflicting
and non-commensurable, and thus Pareto solutions
provide more insights into the competing objectives.
Recently, there has been a growing interest in
evolutionary Pareto optimization in the thermal
systems. A thermoeconomic analysis has been
performed by Toffolo and Lazzareto [5] in which
two exergetic and economic issues in a cogeneration
power plant have been considered as conflicting
objectives. A similar point of view has also been
considered by Wright, et al [7] in a multi-criterion
optimization of building thermal design problem. A
monetary multi-objective optimization of a
combined cycle power system has been studied by
Roosen, et al [8].
In this paper, an optimal set of design variables in
turbojet engines, namely, the input Mach number Mo
and the pressure ratio of compressor c are found
using Pareto approach to multi-objective
optimization. In this study, different pairs of
conflicting objectives in ideal subsonic turbojet
engines are selected for optimization. These include
a combination of thermal efficiency (t) and
propulsive efficiency (p) together with specific fuel
consumption (SFC) and specific thrust (ST). In this
way, a new preserving diversity algorithm called єelimination diversity algorithm is proposed to
enhance the performance of NSGA-II in terms of
diversity of population and Pareto fronts.
2 Multi-Objective Optimization
Multi-objective optimization which is also called
multicriteria optimization or vector optimization has
been defined as finding a vector of decision
variables satisfying constraints to give acceptable
values to all objective functions [2]. In general, it
can be mathematically defined as:
find the vector X * x1* , x2* ,..., xn*
T
to optimize
F ( X ) f1 ( X ), f 2 ( X ),..., f k ( X ) ,
T
(1)
subject to m inequality constraints
gi ( X ) 0 ,
i 1 to m ,
(2)
and p equality constraints
hj (X ) 0
,
j 1 to p ,
(3)
where X * n is the vector of decision or design
variables, and F ( X ) k is the vector of
objective functions which each of them be either
minimized or maximized. However, without loss of
generality, it is assumed that all objective functions
are to be minimized. Such multi-objective
minimization based on Pareto approach can be
conducted using some definitions:
DEFINITION OF PARETO DOMINANCE
A vector U u1 , u2 ,..., uk k is dominance to
vector V v1 , v2 ,..., vk k (denoted by U V )
i 1,2,..., k , ui vi
j 1,2,..., k : u j v j . In other words, there is at
if
and
only
if
least one u j which is smaller than v j whilst the rest
u ’s are either smaller or equal to corresponding
v ’s.
DEFINITION OF PARETO OPTIMALITY
A point X * ( is a feasible region in n
satisfying equations (2) and (3)) is said to be Pareto
optimal (minimal) with respect to the all X if
and only if F ( X * ) F ( X ) . Alternatively, it can
be readily restated as
i 1,2,..., k , X { X *} f i ( X * ) f i ( X )
j 1,2,..., k :
f j ( X * ) f j ( X ) . In other
words, the solution X * is said to be Pareto optimal
(minimal) if no other solution can be found to
dominate X * using the definition of Pareto
dominance.
DEFINITION OF PARETO SET
For a given MOP, a Pareto set Ƥ ٭is a set in the
decision variable space consisting of all the Pareto
optimal
vectors
Ƥ ٭ { X | ∄ X : F ( X ) F ( X )} . In
other words, there is no other X as a vector of
decision variables in that dominates any X ∈Ƥ٭.
DEFINITION OF PARETO FRONT
For a given MOP, the Pareto front ƤŦ ٭is a set of
vector of objective functions which are obtained
using the vectors of decision variables in the Pareto
setƤ٭,
that
is
ƤŦ ٭ {F ( X ) ( f1 ( X ), f 2 ( X ),...., f k ( X )) : X Ƥ
}٭. In other words, the Pareto front ƤŦ ٭is a set of
the vectors of objective functions mapped from Ƥ٭.
Evolutionary algorithms have been widely used for
multi-objective optimization because of their natural
properties suited for these types of problems. This is
mostly because of their parallel or population-based
search approach. Therefore, most of difficulties and
deficiencies within the classical methods in solving
multi-objective
optimization
problems
are
eliminated. For example, there is no need for either
several run to find the Pareto front or quantification
of the importance of each objective using numerical
weights. In this way, the original non-dominated
sorting procedure given by Goldberg [3] was the
basic motivation for emerging different versions of
multi-objective optimization algorithms. However,
it is very important that the genetic diversity within
the population be preserved sufficiently [9]. This
main issue in MOPs has been addressed by many
related research works. Consequently, the premature
convergence of MOEAs is prevented and the
solutions are directed and distributed along the true
Pareto front if such genetic diversity is well
provided. The Pareto-based approach of NSGA-II
[4] has been recently used in a wide area of
engineering MOPs because of its simple yet
efficient non-dominance ranking procedure in
yielding different level of Pareto frontiers. However,
the crowding approach in such state-of-the-art
MOEA is not efficient as a diversity-preserving
operator, particularly in problems with more than
two objective functions. In fact, the crowding
distance computed by routine in NSGA-II [4] may
return an ambiguous value in such problems. The
reason for such drawback is that sorting procedure
of individuals based on each objective in this
algorithm will cause different enclosing hyper-box.
Thus, the overall crowding distance of an individual
computed in this way may not exactly reflect the
true measure of diversity or crowding property.
In this work, a new method is presented to modify
NSGA-II so that it can be safely used for any
number of objective functions (particularly for more
than two objectives) in MOPs. Such modified
MOEA is then used for a four-objective
thermodynamic optimization of subsonic turbojet
engines and the results are compared with those of
original NSGA-II.
3
є-elimination diversity algorithm
In the є-elimination diversity approach that is used
to replace the crowding distance assignment
approach in NSGA-II [4], all the clones and/or єsimilar individuals are recognized and simply
eliminated from the current population. Therefore,
based on a pre-defined value of є as the elimination
threshold (є=0.001 has been used in this paper) all
the individuals in a front within this limit of a
particular individual are eliminated. It should be
noted that such є-similarity must exist both in the
space of objectives and in the space of the
associated design variables. This will ensure that
very different individuals in the space of design
variables having є-similarity in the space of
objectives will not be eliminated from the
population. The pseudo-code of the є-elimination
approach is depicted in figure (1). Evidently, the
clones or є-similar individuals are replaced from the
population with the same number of new randomly
generated individuals. Meanwhile, this will
additionally help to explore the search space of the
given MOP more efficiently.
4
Multi-Objective Thermodynamic
Optimization of Turbojet Engines
Turbojet engines use air as the working fluid and
produce thrust based on the variation of kinetic
energy of burnt gases after combustion. The study
of thermodynamic cycle of a turbojet engine
involves different thermo-mechanical aspects such
as developed specific thrust, thermal and propulsive
efficiencies, and specific fuel consumption. A
detailed description of the thermodynamic analysis
and equations of ideal turbojet engines are given in
[10]. Such introductory thermodynamic model is
basically enough to capture the principles of
behaviour and interactions among different input
and output parameters in a multi-objective optimal
sense. Furthermore, this provides a suitable real-
//pop includes
objective functions//
define
є
k=1
i=1
until i+1<pop_size
j=i+1
until j< pop_size
//Define elimination threshold
//Front No.
IF {║F(X(i), F(X(j))║< є ⋀ ║X(i), X(j)║< є}
F(X(i), F(X(j))∈ ƤŦk٭
THEN pop= pop\ pop( j )
individual
X(i), X(j) ∈ Ƥk٭
// Remove the є-similar
r_new_ind = make_new_random_individual
//Generate new random
individual
pop=pop ∪ r_new_ind
//Add new randomly generated
individual
Figure 1: Pseudo-code of є-elimination for
preserving genetic diversity
world engineering benchmark for comparison
purpose between MOEA using the new diversity
preserving mechanism of this work with NSGA-II.
Input parameters involved in such thermodynamic
analysis in an ideal turbojet engine given in
Appendix A are Mach number (M0), input air
temperature (T0, ºK), specific heat ratio ( ), heating
value of fuel (hpr, kj/kg), exit burner total
temperature (Tt4, K), and pressure ratio, c. Output
parameters involved in the thermodynamic analysis
in the ideal turbojet engine given in [10]are, specific
thrust, (ST, N/kg/sec), fuel-to-air ratio (f), specific
fuel consumption (SFC, kg/sec/N), thermal
efficiency (t), and propulsive efficiency (p).
However, in multi-objective optimization study,
some input parameters are already known or
assumed as, T0 = 216.6 K, =1.4, hpr =48000 kj/kg,
and Tt4 = 1666 K. The input Mach number 0 < M0 ≤
1 and the compressor pressure ratio 1 ≤ c ≤ 40 are
considered as design variables to be optimally found
based on two-objective optimization of 4 output
parameters, namely, ST, SFC, ηt, and ηp.
Evidently, it can be observed that p, t, and ST are
maximized whilst SFC is minimized in those sets of
objective functions. A population size of 100 has
been chosen in all runs with crossover probability Pc
and mutation probability Pm as 0.8 and 0.02,
respectively.
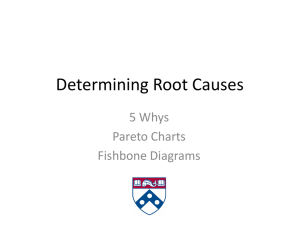
Figure (2) shows the Pareto front of two objectives,
propulsive efficiency and specific fuel consumption
(p, SFC), obtained using both the approach of this
work. It is clear from this figure that choosing
appropriate values for the decision variables,
namely Mach number (M0) and pressure ratio (c),
to obtain higher value of p would normally cause
higher value of SFC. However, if the set of decision
variables are selected based on this Pareto front, it
will consequently lead to the best possible
combination of propulsive efficiency and specific
fuel consumption (p, SFC). In other words, if any
other pair of decision variables M0 and c is chosen,
the corresponding values of p and SFC will locate
a point inferior to this Pareto front. Such inferior
area in the space (plane in this case) of p and SFC
is conspicuously the bottom/right side of this Pareto
front. In figure (2) two sections can be clearly
distinguished. The corresponding values of decision
variables and objective functions in the first section
of figure (2-a) are as c = 40, 0 < Mo ≤1, 2.096x10-5
≤ SFC ≤2.43x10-5, and 0 < p ≤0.39. These values in
the second section of that figure are as 1.07 ≤c ≤
8.25, Mo ≈1., 3.16x10-5 ≤ SFC ≤6.8x10-5, and 0.4 <
p ≤0.55. Therefore, this Pareto front provides
optimal solutions for decision variables M0 and c if
Propulsion Efficiency vs Specific Fuel
Consumption
0.6
0.72
0.7
0.5
0.4
0.3
0.2
parameters, namely, ST, SFC, t, and p, are
considered individually. Such pairs of objectives to
0.68
0.66
0.64
0.62
0.6
0.58
0.56
0.1
0.54
0.52
0
2.E-05
4.E-05
6.E-05
8.E-05
specific fuel consumption (kg/sec/N)
In order to investigate the optimal thermodynamic
behaviour of subsonic turbojet engines, 5 different
set each including two objectives of output
Thermal Efficiency vs Specific Fuel
Consumption
thermal efficiency
є-elim=є-elimination (pop)
design variables and
propulsion efficiency
Pseudo-code of є-elimination
Figure 2: Pareto front of
propulsive
efficiency
and
specific fuel consumption in 2objective optimization
2.1E-05 2.2E-05 2.3E-05 2.4E-05 2.5E-05
specific fuel consumption (kg/sec/N)
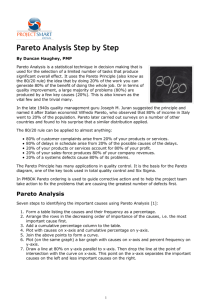
Figure 3: Pareto front of
thermal efficiency and specific
fuel consumption in 2-objective
optimization
be optimized separately have been chosen as (p,
the two-objective optimization of p and SFC is of
importance to the designer. Figure (3) shows the
Pareto front of two objectives, thermal efficiency
SFC), (p, ST), (t, SFC), (t, ST), and (p, t).
and specific fuel consumption (t, SFC), obtained
efficiency and specific fuel consumption (t, SFC).
In other words, if any other pair of decision
variables M0 and c is chosen, the corresponding
values of t and SFC would locate a point inferior
to this Pareto front. Such inferior area in the space
(plane in this case) of t and SFC is conspicuously
the bottom/right side of this Pareto front. The
corresponding values of decision variables and
objective functions of figure (3) are as c = 40, .01 <
Mo ≤1, 2.1x10-5 ≤ SFC ≤2.43x10-5, and 0.65 ≤ t ≤
0.71. Therefore, this Pareto front provides optimal
solutions for decision variables M0 and c if the twoobjective optimization of t and SFC is of
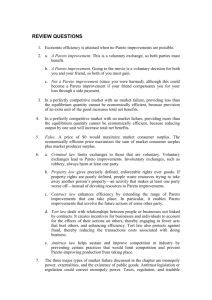
importance to the designer. Figure (4) shows the
Pareto front of two objectives, propulsive efficiency
and specific thrust (p, ST), obtained using the
approach of this work. It is clear from this figure
that choosing appropriate values for the decision
variables, namely Mach number (M0) and pressure
Thermal Efficiency vs Specific Thrust
0.7
0.69
thermal efficiency
pressure ratio (c), to obtain higher value of t
would normally cause higher value of SFC.
However, if the set of decision variables are selected
based on this Pareto front, it will consequently lead
to the best possible combination of thermal
Propulsion Efficiency vs Specific Thrust
0.6
0.5
propulsion efficiency
using the approach of this work. It is clear from this
figure that choosing appropriate values for the
decision variables, namely Mach number (M0) and
0.4
0.3
0.2
0.1
0.68
0.67
0.66
0.65
0.64
0.63
0
0.62
0
500
1000
1500
specific thrust (N/kg/sec)
Figure 4: Pareto front of
propulsive
efficiency
and
specific thrust in 2-objective
optimization
850
950
1050
1150
specific thrust( N/kg/sec)
Figure 5: Pareto front of
thermal efficiency and specific
thrust
in
2-objective
optimization
efficiency and specific thrust (t, ST), obtained
using the approach of this work. It is clear from this
figure that choosing appropriate values for the
decision variables, namely Mach number (M0) and
pressure ratio (c), to obtain higher value of t
would normally cause lower value of SFC.
However, if the set of decision variables are selected
based on this Pareto front, it will consequently lead
to the best possible combination of thermal
efficiency and specific thrust (t, ST). In other
words, if any other pair of decision variables M0 and
c is chosen, the corresponding values of t and ST
will locate a point inferior to this Pareto front. Such
ratio (c), to obtain higher value of p would
normally cause lower value of ST. However, if the
set of decision variables are selected based on this
Pareto front, it would consequently lead to the best
possible combination of propulsive efficiency and
inferior area in the space (plane in this case) of t
and ST is conspicuously the bottom/left side of this
Pareto front. The corresponding values of decision
variables and objective functions of figure (5) are as
37.3 ≤ c ≤ 40, 0 < Mo ≤1, 890 ≤ ST ≤1169, and 0.64
≤ t ≤ 0.7. Therefore, this Pareto front provides
optimal solutions for decision variables M0 and c if
specific thrust (p, ST). In other words, if any other
pair of decision variables M0 and c is chosen, the
the two-objective optimization of t and ST is of
importance to the designer.
corresponding values of p and ST will locate a
point inferior to this Pareto front. Such inferior area
Figure (6) depicts the Pareto front of two objectives,
in the space (plane in this case) of p and ST is
conspicuously the bottom/left side of this Pareto
front. In figure (4), two sections can be clearly
distinguished. The corresponding values of decision
variables and objective functions in the first section
of figure (4) are as 13.5 ≤ c ≤ 39.3, 0 < Mo ≤1,
817.8 ≤ ST ≤1169.4, and 0 < p ≤0.41. These values
in the second section, where p is more than 0.4, are
as 1.22 ≤c ≤ 4.28, 0 ≤ Mo ≤ 1, 515.1 ≤ ST ≤ 906.,
and 0.41 < p ≤0.51. Therefore, this Pareto front
provides optimal solutions for decision variables M0
and c if the two-objective optimization of p and
ST is of importance to the designer. Figure (5)
shows the Pareto front of two objectives thermal,
thermal efficiency and propulsive efficiency (t,
p), obtained using the approach of this work. It is
obvious from this figure that choosing appropriate
values for the decision variables, namely Mach
number (M0) and pressure ratio (c), to obtain higher
value of t would normally cause lower value of p.
However, if the set of decision variables are selected
based on this Pareto front, it will consequently lead
to the best possible combination of thermal
efficiency and propulsive efficiency (t, p). In
other words, if any other pair of decision variables
M0 and c is chosen, the corresponding values of t
and p will locate a point inferior to this Pareto
front. Such inferior area in the space (plane in this
and, in fact, demonstrates the optimal compromise
of such pair of objectives.
Propulsion Efficiency vs Thermal efficiency
0.6
5
propulsion efficiency
0.55
0.5
0.45
0.4
0.35
0.3
0.1
0.3
0.5
0.7
thermal efficiency
Figure 6: Pareto front of propulsive efficiency and
thermal efficiency in 2-objective optimization
case) of t and p is conspicuously the bottom/left
side of this Pareto front. The corresponding values
of decision variables and objective functions of
figure (6) are as 1 ≤ c ≤ 8.78, Mo =1, 0.4 ≤ p ≤
0.56, and 0.16 ≤ t ≤ 0.55. Such values for the
single point in this figure are as, c = 40, Mo =1, p=
0.4, and t =0.71, respectively.
Evidently, figures (2-6) reveal some important and
interesting optimal
relationships
of
such
thermodynamic parameters in ideal thermodynamic
cycle of turbojet engines that may have not been
known without a multi-objective optimization
approach. For example, figures (2-4) demonstrate
that the optimal behaviours of p with respect to
both SFC and ST are approximately linear.
However, the corresponding relationships of t with
respect to both SFC and ST from figures (3-5) can
be readily represented by
t=(7x109)(SFC)2 –323350 (SFC)+4.1524,
(4)
with R2=0.9931, and
t =(6x10-7)(ST)2 +0.0014 (ST)+1.5233,
(5)
with R2=0.9986.
Moreover, figure (6) also represents a non-linear
optimal relationship of t and p in the form of
p =0.8047 (t)2 +9.874(t)+0.6998,
(6)
with R2=0.9982.
It should be noted that these relationships are valid
when the corresponding two-objective optimization
of such functions is of importance to the designer
Conclusion
A new diversity preserving mechanism called єelimination algorithm has been proposed and
successfully used with the Pareto approach of
MOEAs for thermodynamic cycle optimization of
ideal turbojet engines. Such multi-objective
optimization led to important relationships and
useful optimal design principles in thermodynamic
optimization of ideal turbojet engines in the space of
objective functions. These optimal principles could
not have been discovered without the use of multiobjective optimization process.
References:
[1]Srinivas, N. and Deb, K., “ Multiobjective
optimization Using Nondominated Sorting in
Genetic Algorithms”, Evolutionary Computation,
Vol. 2, No. 3, pp 221-248, 1994.
[2]Coello Coello, C.A., “A comprehensive survey of
evolutionary based multiobjective optimization
techniques”, Knowledge and Information Systems:
An Int. Journal, (3), pp 269-308, 1999.
[3]Goldberg, D. E., “Genetic Algorithms in Search,
Optimization, and Machine Learning”, AddisonWesley, 1989.
[4]Deb, K., Agrawal, S., Pratap, A., Meyarivan, T.,
“A fast and elitist multi-objective genetic algorithm:
NSGA-II”, IEEE Trans. On Evolutionary
Computation 6(2):182-197, 2002.
[5]Toffolo, A., and Lazzaretto, A., “Evolutionary
algorithms for multi-objective energetic and
economic optimization in thermal system design”,
Energy 27:549-567, 2002.
[6]Bejan, A., Tsatsaronis, G., and Moran, M.,
“Thermal & Design Optimization”, John Wiley &
(4)
Sons, NY, 1996.
[7]Wright, J.A., Loosemore , H.A., and Farmani, R.,
“optimization of building thermal design(5)
and control
by multi-criterion genetic algorithm”, Energy and
Buildings 34:959-972, 2002.
[8]Roosen, P., Uhlenbruck, S., and Lucas, K.,
“Pareto optimization of a combined cycle power
system as a decision support tool for trading off
investment vs. operating costs”, Int. J. of Thermal
Sciences 42: 553-560, 2003.
(6)
[9]Yao, X., “Evolving Artificial Neural Networks”,
Proceedings of IEEE, 87(9):1423-1447, Sept.,
(1999).
[10] Mattingly, J.P., “Elements of Gas Turbine
Propulsion”, Mc-Graw Hill, 1996.