File
advertisement

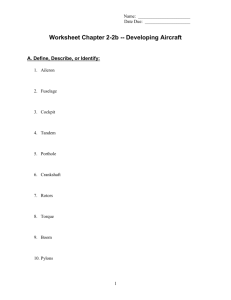
Project Fuga Mini Report #1 Memorial University Jan 31, 2012 Jason Stevens Cara Winsor Evan Power Byron Bennett Alastair Jenkins Executive Summary This report summarizes the work conducted by Project Fuga in preparation for the SAE Aero Design competition. It outlines the objectives of the SAE competition as well as some design goals set out by Project Fuga. It also summarizes the research that was completed as part of the preliminary design phase of the project. Finally the report highlights the forward path of the project and the next steps in the design stage. As the research has shown us, there are many options when designing an airplane and there are a lot of components available for radio controlled models. As the research information was gathered design matrices were created to determine what design aspects would be the best for our project. Through the design matrices the following criteria was selected: 1 motor set up which will be a brushless out-runner. We will use one 2 blade propeller with 2 Li-Po batteries. We are going with a high wing placement, which will be of constant shape and have a deep camber airfoil. The tail will be of standard design and the controls will consist of ones for the elevators, rudder, ailerons, flaps and slats. These outcomes are subject to change as the project progress and analytical and physical testing is conducted. The next stage for Project Fuga is to move into the detailed design stage, where work will take place on performing detailed analysis on wing and fuselage designs. Once the aerodynamic design is complete and simulations have been conducted, the motor sizing and propeller sizing and take place and radio controlled parts can be ordered. After the finalization of the design the group will move into the construction and testing phase where further design changes may take place to cope with arising construction problems. When construction is complete, the competition course can be navigated and weight lifting capabilities fully tested to determine the final results of the airplane. i Contents Executive Summary........................................................................................................................................ i 1. 2. Competition Overview .......................................................................................................................... 1 1.1. Competition Overview................................................................................................................. 1 1.2. Competition Strategy .................................................................................................................. 1 1.3. Functional Goals .......................................................................................................................... 2 Conducted Research ............................................................................................................................. 4 2.1. 2.1.1. Wing Design .......................................................................................................................... 4 2.1.2. Tail Design ............................................................................................................................. 8 2.1.3. Fuselage Design..................................................................................................................... 9 2.2. 4. Propulsion Research .................................................................................................................. 10 2.2.1. Propeller Selection .............................................................................................................. 10 2.2.2. Motor Selection .................................................................................................................. 11 2.2.3. Battery Selection ................................................................................................................. 12 2.3. 3. Aerodynamic Research ................................................................................................................ 4 Control Research ....................................................................................................................... 12 2.3.1. Radio Control Components ................................................................................................. 13 2.3.2. Wing Connections ............................................................................................................... 14 2.3.3. Payload Loading .................................................................................................................. 14 Design Selection .................................................................................................................................. 15 3.1. Research Application ................................................................................................................. 15 3.2. Safety Concerns ......................................................................................................................... 15 3.3. Environmental Issues................................................................................................................. 15 3.4. Ethical Issues.............................................................................................................................. 15 Project Management Plan .................................................................................................................. 16 4.1. Work Breakdown Structure ....................................................................................................... 16 4.2. Project Schedule ........................................................................................................................ 16 4.3. Preliminary Cost Estimate ......................................................................................................... 17 5. Forward Plan ....................................................................................................................................... 18 6. Conclusion ........................................................................................................................................... 18 ii 7. References .......................................................................................................................................... 19 8. Appendix A: Design Matrices .............................................................................................................. 20 9. Appendix B: Gantt Chart ..................................................................................................................... 22 iii 1 Project Fuga Design Report #1 1. Competition Overview 1.1. Competition Overview The SAE Aero competition is an SAE sponsored collegiate design competition. The task set out by SAE is to design and fabricate an R/C plane to the specifications listed in 2012 Collegiate Design Series Aero Design East and West Rules. Within these rules are 3 classes of the competition: regular, advanced, and micro. Project Fuga is following the rules for the micro class section of the competition. Where the micro class differs from the regular class is primary in the size of the aircraft desired. For the micro class the plane and all required flight components must fit in a box with the inside dimensions 24 inches by 18 inches by 8 inches. As with all the classes the goal is to have your plane carry the maximum payload, in the micro class this is determined by the percent of the total plane plus payload weight that the payload is, called the payload fraction. The rules also designate that the payload bay must be a minimum size of 2 inches by 2 inches by 5 inches which will be tested by inserting an object of those dimensions into the payload bay. Another component of the micro class is that the plane is supposed to be designed to be autonomous; however this will be removed from Project Fuga's scope. The decision to forgo this design goal was made after internal discussions and confirmation from the project supervisor. The main reasons for this are it is not believed to be a necessary design and from the team's previous experience with autonomous vehicles it is seen as to intensive and problematic a goal for the short time of this project. 1.2.Competition Strategy In order to meet the design goals of our project, the project team decided it was important to break the physical design up into multiple components. These components will be virtually tried and tested to maximize performance efficiency. Once we have achieved acceptable designs for each component, they will then be assembled together, virtually, to test their compliance with one another. Once a desired outcome is achieved, we will then proceed to building a physical prototype. The separate basic design sections are: Fuselage Aircraft wings Tail section Landing gear Propulsion system Controls system The design process for the physical prototype will first require the use of flow simulation programs to test the lift and aerodynamics before an actual prototype is created. This enables us to maximize the lift and minimize the drag on a virtual model, thus eliminating construction costs on prototypes that would have to be redesigned to maximize efficiencies. Engineering 8936 January 31, 2012 2 Project Fuga Design Report #1 Once an acceptable virtual model is completed and performs to its maximum efficiency, we will then move to construction phase of the model to create a full working prototype. This will be done by making use of Memorial University's rapid prototyping machine. Implementing a SolidWorks model of the fuselage, wings, tail section, landing gear and any other smaller pieces separately will give us the ability to make use of the machine to automatically construct these components so that they may be assembled once completed. Designing the controls system will make for a different approach. Model testing and construction is not required here. This will involve research into how remote control systems in planes are laid out. Of course, our physical model will have to be designed so that it compensates for the control system components. Some of our resources include: Our supervisor, Dr. Krouglicof, has a good background in mechatronics which combines the disciplines of mechanical, electrical and computer engineering. Faculty technicians who have experience in designing and constructing remote control vehicles. Using a store bought remote control airplane to disassemble for better understanding on how a remote control system is designed to compliment a physical aircraft. While the aircraft is being designed, it will be very important to keep an open mind into how the control system will be integrated. This includes circuits, batteries, wires and motors. The final design must have all systems evenly distributed so that there are no imbalances, sufficient space inside to store all control system components, and assembly/disassembly remains quick and easy. Like the control systems that are built inside the plane, the controller will not require a design path as outlined for our physical prototype. We will use a controller built for a remote controlled plane but reprogrammed to suit our own. This will require that we use some of the skills that we have acquired from earlier electromechanical courses in order to design a system with mechanical components that responds to a remotely operated device. Much of this stage of our design will be a trial and error since with most electromechanical systems there are always bugs to work out in order to perfect a final operating model. 1.3. Functional Goals Project Fuga will be designing its aeroplane as per SAE International 2012 Collegiate Design Series Areo Design East and West Rules adhering to the Micro Class requirements. The decision to attempt the Micro class instead of the intended Standard was largely influenced by Dr. Nickolas Krouglicof’s belief that the advantages of the rapid prototyper could be better exploited if the design size better matched the build envelope of the rapid prototyper. The table below outlines the design requirements and limitations that are detailed in the SAE rules. Along with the requirements outlined by the SAE rules the team has reviewed the scoring criteria and it is evident that the two most important aspects to a team’s flight score are operational availability and payload fraction, their use in determining flight score is shown by the equations below. Engineering 8936 January 31, 2012 3 Project Fuga Design Report #1 Because of the importance of these the team felt it important to set metrics for these to ensure that project is progressing well. To determine appropriate values for these the results for the 2011 Micro competition were reviewed. Along with payload fraction and availability the team concluded that a flight time per charge should also be specified. The concluded metrics are shown in the table below: # Design requirements/limitations 1 2 3 Autonomous No lighter than air or rotary wing aircraft Aircraft Identification 4 Assembly 5 Payload requirements 6 Launching requirements 7 8 Radio Requirements Power Supply requirements 9 Propulsion 10 Sizing 11 Mission requirements Details/Comments/ Explanations As previously mentioned Project Fuga will not adhere to this constraint Rules out the design of a helicopter or blimp. Requirement of a 3” identification number on a vertical portion of the plane. Plus other numerous identification requirements, however no others state required dimensions A Complete Assembly and launch must be achievable in 3 minutes by a 2 member team. The payload bay is to have minimum dimensions of 2” x2” x5” and consist of a support structure and payload plates, the payload can not be used to increase structural stability and no portion of it or the aircraft may be made of lead Within the Micro class there are 2 launching launching alternates, a hand held launch or an elastic launching device of the tams design. All planes must have full radio control-ability by a 2.4 GHz radio. The Micro class is fully electric and a two or one battery setup is permitted. If a single battery setup is used system isolation must be achievable. The aircraft is allowed to have as many motors and propellers as desired and may use gearboxes to achieve different motor and propeller speeds. No metal propellers are allowed. The aircraft and all necessary flying components, including any launching devices must all fit into a padded case with maximum inside dimensions 24” x 18” x 8” For a successful mission the aircraft must take off and complete a minimum of one 360 loop of the course (~600ft) and then land in the designated landing area in a single touch landing. Table 1: SAE Requirements Engineering 8936 January 31, 2012 4 Project Fuga Design Report #1 Fuga Design Metrics Metric # Description 1 Operational Availibility 100% 2 Payload Fraction 0.65 3 Sustainable Flight Time 20 mins Reasonning Making sure the aircraft is is reliable is just as important to making it competitive for the team, if you can't count on operation what's the value of what you've created. Results from 2011 show that this is an achivable goal. This value is calculated by the equation above for payload fraction and represents 80% of the highest payload fraction from last years competition. While to compete the aircraft must only complete one short course the team believes for this design to have real world application it needs to operate for a more substantial time. 20 min flight time is believed to be substaintial time for the aircraft to reach the limit of the controller range and back. Table 2: Fuga Design Metrics 2. Conducted Research 2.1. Aerodynamic Research Since the early twentieth century when the Wright brothers invented and built the worlds first successful flying machine, the design of the airplane has gone through endless changes to account for improve aerodynamics, stability, handling and efficiency. In this section, many of these different designs will be evaluated based on what is most desired for the goal of the project. The differentiating designs will be outlined in three sections: wing design, tail design, and fuselage design. Designing the proper wing is the most essential part for providing a plane with the maximum efficiency. The wings are what provide the lift, drag and movement of the plane. Designing these properly will determine how fast of a plane will be required for take-off and landing, how much weight the plane can carry and how stable the plane will be during flight. When compiling information about wing design, there was a lot of information about the manufacturing of the wings and storage of fuel within the wing sections. Since Fuga will be using the rapid prototyper, and an electric motor these design considerations are not relevant and therefore not covered in this report. 2.1.1. Wing Design The design of the airplane wing has gone through many changes over the years and only continues to do so with designers always looking for ways to improve the efficiency of an aircraft. Some ways to achieve this are cutting down on drag forces; increasing the lift as a result of increasing wing area and aircraft speed; and improving stability and handling while in flight. These three main points of wing design were the driving factors in choosing a suitable wing layout for the project. Engineering 8936 January 31, 2012 5 Project Fuga Design Report #1 Airfoils are the cross-sectional shape of the wings of an airplane. They create the lift and drag on the wings which move the whole aircraft. Figure 1: Airfoil Design Considerations (1) When designing the airfoils for the wings of an aircraft here are some main parameters that must be considered when determining the proper aerodynamics (2). Leading edge radius The leading edge radius is found at the front of an airfoil. A circle is drawn on the front of the crosssection with tangent lines coming off its left side to create the top and bottom of the wing. The radius of this circle is the leading edge radius. The radius effects the boundary layer separation (the stall characteristics). A standard for leading edge radius set by the National Advisory Committee of Aerodynamics is it should be one percent of the chord length (the chord length being the full length of the airfoil). Mean camber line The mean camber line, as shown in Figure 1 is the line that is midway between the upper and lower surface. This is important in developing the aerodynamic characteristics of an airfoil as it contributes to the maximum lift coefficient achievable, which impacts the maximum lift capabilities of the aircraft. Max thickness and the thickness distribution of the profile The max thickness of an airfoil is located approximately 1/3 from the tip. This affects the speed and lift of an aircraft. As the maximum thickness of the wing increases, the velocity of the air particles around the airfoil increases. This creates a minimum pressure on the airfoil. With an increase in the thickness of the airfoil there is a positive effect to the maximum lift coefficient which increases the maximum lift of the aircraft. However this beneficial effect can come at a cost. As the maximum thickness is increased the boundary layer separation occurs at an earlier point along the wing, creating larger drag on the aircraft. Planforms are the shape of the wingspan looking at the plane from the top view. There are multiple planforms for airplanes, such as rectangular, elliptical, tapered and delta swept. Each has pros and cons, Engineering 8936 January 31, 2012 6 Project Fuga Design Report #1 some such as rectangular are easier to manufacture while tapered creates a stiffer structure. Although, these benefits are for commercial size aircrafts for the purpose designing a micro-airplane the most important design is the aspect ratio (AR). This is the ratio of the wingspan length (b) and the average chord length(c). Therefore, for a rectangular wing AR = b/c, for a nonrectangular wing AR = b2/S, where S is the wing area (2). The Fuga team will be looking for a wing design with a high AR; so long and slender wings. This creates less drag at low speeds. Other characteristics that are important for wing design are the section distribution, the taper ratio, the twist and the sweep back. However, these designs are not important for an R/C plane with one propelled engine and therefore are not discussed. Elliptical Wing – An aircraft with an elliptical wing configuration are aerodynamically the most efficient. It’s design will make it simple to cut down on drag forces however these wings are the most difficult to make and have less available wing area for lift. [3] Constant Chord – The greatest wing area can be found with the constant chord configuration. A greater wing area translates into a greater lift area, giving the constant chord wing design the greatest lift capabilities. This increased area will also generate high drag forces and increase the stresses on the root structure. However, these disadvantages only become significant on large or fast aircrafts. So, due to the size constraints of the SAE micro class the project Fuga aircraft will be small and moving at slow speeds so these should not be an issue. The constant chord wing design is also the easiest and cheapest to create. [3] Tapered – More aerodynamically and structurally efficient than a constant chord wing however there is a loss of wing area and therefore a loss of potential lift. This wing span design is still much easier to make than elliptical and is therefore the most commonly used type of planform for commercial planes. [3] a) Elliptical b) Constant Cord c) Tapered Figure 2: Planforms The vertical wing position on a number of different aircrafts was researched to find which positioning is best for which plane requirement. High position wings are mostly used on aircrafts that require low speed and heavy loads, such as cargo carriers and water bombers. Mid position wings are designed for most commercial aircrafts that need a higher speed and weight. Low position wings are designed for high-speed aircrafts with lighter weight, such as fighter jets and private jets. As the wings are elevated from low to high as shown in Figure 3, the aircraft's manoeuvrability is lowered while its stability is increased. Once a high wing elevation is reached, an aircraft is the most stable with a higher possible payload at the cost of reduced manoeuvrability. Because the main design Engineering 8936 January 31, 2012 7 Project Fuga Design Report #1 goal of the project is to carry as high of a payload that is possible, a higher wing elevation is therefore more desired. [3] a) Low Wing b) Mid Wing c) High Wing Figure 3: Wing Placement The twist of the wings is the angle of attack. This is the angle which the wings are positioned on the plane to produce the highest amount of lift to get the plane in the air. Team Fuga will be doing further calculations to find the correct angle of attack once the plane weight and size are finalized. Figure 4: Angle of Attack (1) The purpose of a flap is to increase the lift to drag radio at reduced airspeeds by increasing the wing area and airfoil camber. Ideally with a flap that covers half the wingspan length a coefficient of lift (CL) of approximately 1.9 is achievable. There are two different designs for flaps that will be considered for the Project Fuga R/C plane shown in Figure 5 below. Engineering 8936 January 31, 2012 8 Project Fuga Design Report #1 Figure 5: Common Flap Designs (1) There is the Common or plain flap, which is hinged as part of the trailing edge of the wing. One downfall for the Common flap is that the airstream flowing over the airfoil does not have enough momentum to overcome the change in direction causing an increase in drag. With a flap angle of fifteen degrees there is too much drag to provide any improvement. [1] The other option being considered is the Fowler flap with is more efficient. It is designed with a servo that creates a gap so that the air from underneath is caught in a funnel, accelerated and blown into the boundary layer at the upper surface. This design allows the flap to contour up to twenty-five degrees. [1] Slats are smaller airfoils that are mounted on the front of the wing assisting in turning the air around the leading edge at high angles of attack thereby delaying leading-edge stalling. This provides additional lift during takeoff and landing. Depending on the final weight and wing design, Project Fuga is looking into designing a fixed slat. This design was chosen over the retractable design because of the extra weight and space of the servos required to operate the retractable slats. However further analysis is required to determine if the amount of lift generated by the slats overcomes the additional weight added. 2.1.2. Tail Design The tail section, or also known as the empennage, provides stability to an aircraft. The empennage on most aircrafts host vertical and horizontal stabilizing elements that control the flight dynamics of pitch and yaw. These two elements are the elevators (pitch) and rudder (yaw). The choice in a proper tail section for the project will depend on which configuration is the most stable while also being the most simple to incorporate both elevators and rudder. Standard Tail – The standard tail design is when the horizontal stabilizer is mounted on the bottom of the vertical stabilizer. This is the most common aircraft empennage design as it offers a lot of simplicity for the designer as he may add one elevator (known as a stabilator) instead of two and one rudder. This arrangement also reduces costs as it uses less material than other empennage designs. Engineering 8936 January 31, 2012 9 Project Fuga Design Report #1 Twin Tail – The twin tail empennage design houses two vertical stabilizers on each end of one horizontal stabilizer. The most obvious benefit of this arrangement is that each of the rudders are located outside the wake of the propulsion system located at the nose of the aircraft. Due to this, the yaw is better controlled since the airflow through the rudders is clean air and not turbulent air from the propeller. This increased control is a very desirable quality, however because the airspeeds for this project are very low the effect of the propeller wash should be minimal. This makes the added weight and increased complexity of the controls for this design unfavourable. T-Tail – T-Tail designs are often used where clean air is required for more efficient pitch control [ep1]. Because of the elevated vertical stabilizer, the elevators are kept well above the turbulent flow coming from the thrust system. Because of the clean air flow, this arrangement is especially good for airplanes operating at relatively low speeds where that clean airflow is required. The major drawback of the T-Tail design is that it’s susceptible to a deep stall condition that results from airflow over the empennage and elevators producing a stalled wing leading to a total loss of pitch control [ep1]. The T-Tail is also more expensive to fabricate as it requires more expensive materials to be strong and heavy enough to support the forces generated by the tailplane. V-Tail – Otherwise known as the butterfly tail, the V-Tail has reduced surface area as opposed to the TTail and thus produces less drag force. The V-Tail does not use rudders or elevators but instead combines them both to use ruddervators. Ruddervators combine the pitch and yaw controls as they are physically placed on the aircraft empennage on matching angles to the horizontal. The biggest drawback of the V-Tail is that, using ruddervators to combine pitch and yaw is difficult and requires a complex control system [ep2]. Many other empennage designs exist besides the four that are covered above. Some of these designs include: X-Tail, inverted V-tail, Pelikan tail, Cruciform, and Vertical fin. These other designs were also researched in order to arrive at a suitable choice for the project but were not included in detail as the ones above. This was because out of all the designs, the Standard tail, Twin tail, T-Tail and V-Tail were those that seemed the most suitable and were therefore researched further. The empennage design that is believed to most suitable is the Standard Tail. A big reason for this decision is because of the main goal of the project: reduce aircraft weight to maximise payload. Because the Standard Tail uses the least amount of materials, the project is then able to save on costs and materials used. This is also a desirable arrangement because of its simplicity. The tail section is going to need enough space for internal integration of the control system connection to the rudder and elevators and it is believed to be the easiest to accommodate with a Standard Tail. It was originally thought that a Twin-Tail design would be decided on, mostly due to the fact that yaw control is much better because of the clean airflow through the rudders. However, the will be travelling at low speeds so the turbulent flow from the propeller wash to the rudder is believe to be minimal. 2.1.3. Fuselage Design The fuselage is the main body that will hold the payload and majority of the control system. A properly designed fuselage is important for position control and as a stabilization surface to maintain stability and improve manoeuvrability [ep3]. Engineering 8936 January 31, 2012 10 Project Fuga Design Report #1 Many fuselage designs exist, and vary as a function of both speed (subsonic, supersonic and hypersonic) and carrying capacity. Some of these standard designs are shown below. Figure 6: Standard Fuselage Designs These designs are as follows: 1. Subsonic speeds 2. Supersonic speeds 3. High carrying capacity subsonic 4. High manoeuvrability supersonic 5. Water landing plane 6. Hypersonic speeds The design plan for the fuselage differs from that used for wings and empennage. The current designs that have been researched will be used as a template and recreated within flow modelling software. Changes to the fuselage design will then come as a result of viewing each iteration under airflow and modifying it to achieve the results that are desired. Such variables that will be targeted for improvement will be lift, balance and size. 2.2. Propulsion Research One of the main components of the airplane is the propulsion system. As model airplanes have been around for some time now, there are many options available for the selection of motors, propellers and batteries. Below is a comparison of the commonly available propulsion components for our radio controlled airplane. 2.2.1. Propeller Selection There are many options available to choose from when it comes to propellers. Current options vary in size, shape and material construction. Some characteristics of a propeller to take into consideration when designing the airplane are the propellers diameter, the blade angle, the number of blades and the material of construction. These characteristics combine to vary a propellers axial velocity flow, thrust and efficiency. When the motor has been selected a range of available propellers will be specified for Engineering 8936 January 31, 2012 11 Project Fuga Design Report #1 that motor. Selecting a propeller within this range to ensure the propeller and motor are work together properly is important. 2.2.2. Motor Selection When choosing a motor there are two main characteristics to consider, the first is whether or not the motor is brushless or brushed. The second is if the motor is an out-runner or in-runner. Brushless motors have several desired characteristics which will be beneficial to the project: Less required maintenance due to absence of brushes High efficiency, no voltage drop across brushes High output power/frame size. Reduced size due to superior thermal characteristics. Brushless DC motors have their windings on the stator, which is connected to the case providing better heat dissipation Higher speed range - no mechanical limitation imposed by brushes/commentator Low electric noise generation However the brushless motors are more expensive than the standard brushed motor and the control of them is slightly more complex. Brushed Motors have several characteristics which make it appealing to the project as well, these include: Two wire control Replaceable brushes for extended life Low cost of construction Simple and inexpensive control No controller is required for fixed speeds Operates in extreme environments due to lack of electronics However there are many disadvantages with a brushed motor, these include: Periodic maintenance is required Speed/torque is moderately flat. At higher speeds, brush friction increases, thus reducing useful torque Poor heat dissipation due to internal rotor construction Higher rotor inertia which limits the dynamic characteristics Lower speed range due to mechanical limitations on the brushes Brush Arcing will generate noise causing EMI Based on the pros and cons listed above for the brushed and brushless motor, Project Fuga is considering a brushless motor for its propulsion design. Out-runner motors have rotating magnets on the outside of a stationary stator, which is on the inside. Compared to in-runners, (which have rotating magnets on the inside of a stationary stator) Our-runners are capable of providing greater amounts of torque and run at lower rpms, therefore being able to rotate a larger propeller. The main design goal of the project is to lift as much weight as possible while keeping the weight as low as possible, with this goal in mind, Project Fuga is Engineering 8936 January 31, 2012 12 Project Fuga Design Report #1 considering an out-runner motor. The size of the motor will be determined by the weight of the airplane and its aerodynamic characteristics. 2.2.3. Battery Selection There are many battery options available to the group which can be used for the project. These include Li-Cd, Li-MH and Li-Po. The characteristics of each battery are listed below. Li-Cd Uses nickel oxide hydroxide and metallic cadmium as electrodes Cadmium is a toxic element Capable of supplying huge surge currents 40-60 W*h/kg Li-MH Uses nickel oxide hydroxide and a hydrogen absorbing alloy as electrodes High rate of self-discharge similar to Li-Cd battery Has a capacity of 2-3 times that of a Li-Cd battery High energy density similar to the Ni-ion battery 100 W*h/kg Li-Po Lithium-salt electrolyte is held in a solid polymer rather than an organic solvent found in the Liion battery Lower cost of manufacturer Reliable Rugged The final choice of the battery will be chosen when a final motor is selected. The requirements of the motor will dictate which battery choice is the best. 2.3. Control Research To have full control of a fixed wing model aircraft there are four main components which need to be controlled with the option of a fifth and sixth component: [6] 1. 2. 3. 4. 5. 6. Throttle Control Ailerons Control Elevator Control Rudder Control Flap Control Slat Control By having control over these components the aircraft will be fully manoeuvrable in the air, however with each controllable component added to the aircraft the total cost of the project will increase, due to the increased number of servos and channels required to control the servos. Engineering 8936 January 31, 2012 13 Project Fuga Design Report #1 1. Throttle Control: Throttle control is a necessary component to the aircraft design. It allows the operator to vary the power input to the engine, which in turn varies the rotational speed of the propeller which changes the speed at which the aircraft moves forward, changing the amount of lift the wings will generate. Without the throttle control the aircraft will go full power from take off until the batteries run out of power and the engine cuts out. This is not a reasonable way to fly the aircraft, therefore making throttle control a must have control component for the project. 2. Aileron Control: The ailerons allow for an aircraft to control its rolling motion. With ailerons an aircraft is able to dip its wings from side to side, putting the aircraft into a banking motion. This motion allows the aircraft to turn during flight. On model aircraft ailerons are not always necessary as the wings of the aircraft can have an upward slope to them. This slope along with rudder control allows for a model aircraft to make large turns with just the rudder control. However to have full control of the aircraft ailerons are required. 3. Elevator Control: The elevators control the pitch of an aircraft, which controls the up and down movement of the aircraft. Changing the pitch of an aircraft changes the angle of attack for the wings, which in turn changes the lift characteristics of the wing, either increasing the lift or decreasing depending on the shift in angle of attack. 4. Rudder Control: Controlling the rudder allows for an aircraft to yaw about its center of gravity. Moving the rudder creates a skidding motion for the aircraft, much like a car on a perfectly slippery road turning its wheels but the car continues to move in its initial trajectory. With rudder control the aircraft can be controlled in the yaw motion countering the external disturbances which may cause the aircraft to yaw undesirably. 5. Flaps Control: Flaps are used on aircraft to increase the lift generated by the wings, lowering the stall speed and increase the drag. Having flaps on aircraft allow for increase lift at lower speeds as compared to aircraft without flaps. This is extremely beneficial to the project as the goal is to generate as much lift as possible to allow for a large payload. This makes the addition of flaps to the project a highly desirable option; however, further testing into the added weight of flap control vs. the additional payload achievable needs to be conducted. 6. Slat Control: Slats on an aircraft allow for the aircraft to operate at an increase angle of attack. This increased angle of attack creates a higher lift coefficient and allows the aircraft to fly at slower speeds as well as take off and land in shorter distances. The increased lift coefficient makes slats a desired component for the project. 2.3.1. Radio Control Components The radio components required to control a radio controlled plane are: 1. 2. 3. 4. Transmitter Receiver Electronic Speed Controller Servos Engineering 8936 January 31, 2012 14 Project Fuga Design Report #1 The type of each component changes depending on how many components are required to be controlled. Each controlled component requires its own channel on the transmitter, for example, the throttle control will be separated from the elevator control. Besides the throttle control, each component will require a servo to provide motor movement. 1. Transmitter: The Transmitter sends radio waves from the operator of the aircraft to the aircraft itself, instructing the aircraft on what to do. With the movement of a joystick the throttle of the plan can be increased, or with the movement of another joystick the ailerons can be adjusted to put the plane into a banked turn. Transmitters come in a range of channel numbers, from 2 channels to 18 channels, where each channel controls a different component of the aircraft. 2. Receiver: The receiver takes the radio waves being sent from the transmitter and translates them into electrical signals which can be used to move servo motor or change the throttle position. The receiver is paired with one transmitter to ensure there are no crossed signals when multiple aircraft are flying in one location. 3. Electronic Speed Control: The electronic speed control regulates the speed of the motor to allow for varying speeds of the electric motor. It is placed in the electric circuit between the receiver and the motor as well as between the battery and the electric motor. 4. Servos: Servos are small electric motors which control various components of the radio controlled aircraft. The number of servos on an aircraft depends on the number of channels on the transmitter and the requirements of the plane. On top of a servo is an arm which translates the electrical signal from the receiver into a mechanical movement to control the plane. 2.3.2. Wing Connections Currently Project Fuga is looking at two different types of wing connections. The first type is a mechanical connection to ensure the wings are secured firmly to the fuselage , as well as an electrical connection to control servos mounted in the wings for the flaps and the ailerons. This will ensure full control of the plane as well as give the ability to dismantle the plane for transportation. The second type of connection is a mechanical connection of the wings to the fuselage, as well as a mechanical connection to translate the servo movements inside the fuselage into aileron movement or flap movement in the wings. Further analysis, research and design will be conducted to decide which connection combination will be most suitable for this project. 2.3.3. Payload Loading Currently payload considerations consist of a quick loading system, where the payload is attached to rails and there are rails inside the fuselage. The payload will be loaded on these rails and there will be quick release fasteners in place to secure the payload to the fuselage. Further analysis will be performed on the payload loading once the design and shape of the fuselage has been finalized. Engineering 8936 January 31, 2012 15 Project Fuga Design Report #1 3. Design Selection 3.1.Research Application All the knowledge of the research was complied together in design matrices to determine the best set up for our airplane. As a result of group discussions about the design matrices the following outcomes were produced. The group is going with a 1 motor set up, with a brushless out-runner motor. For the propeller the matrix showed 2 blades will be the best. We will have a 2 battery set up with Li-Po batteries. For the aerodynamic design we are going with a high wing placement, constant wing shape with a deep camber airfoil shape. The tail section will be of standard design and we are going with elevators, rudders, ailerons, flaps and slats for the controls. See Appendix A for the Design Matrices. 3.2. Safety Concerns In the design and construction of this project there are very few safety concerns. The main concerns are being mindful of the prop if it is rotating and be safe using any tools. Also if any toxic glues are used it will be important to ensure that the work space is well ventilated. These concerns will be minimized by the implementation of a buddy system whenever we are working on the plane. This means that no one will ever be working alone on the plane. Also appropriate personal protective equipment will be used during all phases of the project which will mainly be safety glasses, boots, and work gloves. For the testing and operation phase there are more safety concerns and the SAE Aero rules set out to address these. The rules require that the plane is only flown by a certified RC pilot and that PPE is worn during take off; “Safety gear must be used by individuals launching the aircraft. Safety glasses and hard hat with full face shield are required.” Along with these there are safety design requirements, such as safety nuts on propellers. Overall as an SAE sponsored competition safety is stresses as the most important consideration. 3.3.Environmental Issues In reviewing the project from an environmental point-of-view it is seen as a very low threat. Due to its size it does not posses the ability to start any major environmental crisis. While the material choice of a thermoset plastic may not be as biodegradable as a more common choice of wood and paper the materiel is highly recyclable and could be reused for future rapid prototyping. As the plane will be battery powered there is no threat of harmful emissions, however care will have to be taken in the proper disposal of the batteries when they pass their expiry date, as well as following proper cleanup procedures if the battery were to leak. 3.4. Ethical Issues The design goal of this project is to minimize the aircraft weight to payload ratio as much as possible. Many designers have pursued this result for many reasons: improving commercial aircraft carrying capacity and increasing loads for transportation of goods to name a couple. Considering the micro size and quick assembly goals of the competition the aircraft is being designed with a fairly specific design in Engineering 8936 January 31, 2012 16 Project Fuga Design Report #1 mind which would be recognisance of some sort. Where this project has the ability to cross an ethical line is if the design were to be used in a military capacity. This could include using the design for carrying explosive weaponry either for transport or use in bombing runs. To use the design for such a purpose would cross an ethical boundary that we as a team had no motivation in doing. 4. Project Management Plan 4.1. Work Breakdown Structure As part of Project Fuga’s project management plan a work breakdown structure was created, which consists of three project phases and four project elements (as shown in table3 and 4 below). The work breakdown structure is the basis for the project management and is used to organize the project and the project activities. Phase Description Consists of the research into airplane design, the concept selection Preliminary Engineering process, cost estimates and plan for detailed design. Detailed Engineering Construction Consists of detailed analysis of all airplane components, issued for construction drawings, final detailed estimate, early procurment of items and planning of construction phase. Consits of fabrication, construction, assembly, testing and troubleshooting of the model airplane. After this phase the airplane is delievered to the client. Table 3: WBS of Project Phases WBS Elements Description Includes: Scheduling, cost control, procurment, reporting, communications, estimating, rules and regulations, informationg Project Management management and client interface. Engineering and construction of the airplane aerodynamic Aerodynamic Design components Propullision Engineering and construction of the airplane propullision systems Engineering and constructino of the airplane radio control R/C and Electronic Comp. components. Table 4: WBS of Project Elements 4.2. Project Schedule Part of the project management plan was to create a detailed design schedule. This schedule was created at the beginning of the project to provide the team with an outline of project and the milestones which are required for the team. To develop a detailed project schedule, Micorsoft Project was utilized as the planning software. A copy of the project schedule can be seen in appendix #. Engineering 8936 January 31, 2012 17 Project Fuga Design Report #1 Currently the project is concluding the preliminary design phase of the project and prepare for the detailed design phase. This section has been estimated for the schedule, but due to unforeseen problems, the timeline will be changed, therefore the project plan will be updated weekly to capture these events. One of the key challenges of this project is to ensure that all design teams are working closely together to ensure the aircraft is moving towards the same goal with minimal reworking. 4.3.Preliminary Cost Estimate The funding for Project Fuga comes from two sources. The first source is from Memorial University of Newfoundland which has agreed to provide $250 of funding. The second source of funding for the project comes from the team members which have agreed to provide $50 each towards the project. This brings the total available funds to $500, as shown in Table 2. Revenue Source Amount $250.00 $250.00 $500.00 MUN FUGA Total Table 5: Project Revenue As part of the financial plan the team came up with a brief estimate of the expenses expected to be encountered throughout the project. The expenses can be seen in Table 3. The estimate won’t include all expenses which will be encountered throughout the project but is a starting point to help determine the cash flow for the project. Expenses General Item Covering Material Rapid Prototype Material Wheels Controls Description CoverLite Syn Tissue 19.5" x 36" $6/in3, 16 Tread Lite Wheels - 2" (2) Miscellaneous Items Electronics Linkage and Hinges Electric Motor Motor Battery Chargers Props Field Equipment Total Connectors, Adapters, Charger, Wire, Testers, Speed Control Pushrod Kit, Ball Link, Hinges Park 370 Brushless Mtr 4100KV Lithium-Ion, LiPo, NiMH, NiCd Lithium-Ion, LiPo, NiMH, NiCd Elastic Launch, etc Cost $6.00 $96.00 $6.00 Item Radio System Servos (x4) Receivers $20.00 Radio Batteries $75.00 Total Description Cost $50.00 $60.00 $30.00 $10.00 $150.00 $15.00 $30.00 $20.00 $17.00 $5.00 $10.00 $300.00 Table 6: Project Expenses A summary of the financial is shown in table #. Currently each team member is not required to provide the full $50 for the project, however having the extra $10 from each member will provide the project with capital leeway. Engineering 8936 January 31, 2012 18 Project Fuga Design Report #1 Budget Money Flow Revenue Expenses Net Net / Member Amount $500.00 $450.00 $50.00 $10.00 Table 7: Budget 5. Forward Plan As provided in the project schedule, the next phase of the design process is to create a greater detailed design model. Based on the understandings from research and concept selection, further research and calculations must be done to determine the proper size and final design of the R/C plane. As well, developing a model on SolidWorks will allow testing of the aerodynamics of the concept plane. On completion of the SolidWorks model a physical model will be made using Memorial’s Fortus 400mc rapid prototyper. This model will allow possible testing in the wind tunnel to further confirm aerodynamics, as well as completion of the controls for the aircraft for flight tests. 6. Conclusion Project Fuga is well on its way to designing a high payload airplane. The team is currently gearing up for the detailed engineering phase of the project, where detailed analysis will be conducted on all components of the airplane and the final design of the airplane will be determined. Once the detailed engineering phase is complete, the group will move onto the construction and testing phase of the project, where the final design iterations will be made to cope with construction problems. If time permits, the team will implement design considerations from testing the model. Engineering 8936 January 31, 2012 19 Project Fuga Design Report #1 7. References (1) Chris Heintz, P. Eng., “Airfoils Part II”, EAA Light Plane World Magazine [online], June 1987, [cited Jan. 28, 2012], available from World Wide Web:<http://zenithair.com/kit-data/ht-87-6.html> (2) John J. Bertin, Aerodynamics for Engineers, 4th ed., Upper Saddle River, N.J.: Prentice-Hall, 2010 (3) Dan Johnston, “An Introduction to the Airplane”, U.S. Centennial of Flight Commission [online], [cited Jan. 17,2012], available from World Wide Web: <http://www.centennialofflight.gov/essay/Theories_of_Flight/airplane/TH2.htm> (4) Ira H. Abbott and Albert E Von Doenhoff, Theory of Wing Sections – including a summary of airfoil data, Dover Publications, Inc. New York, 1959 (5) Peter Garrison, “Rectangular Wings”, Flying Magazine [online], Published: Jan 01,2003 [cited Jan, 21, 2012], available from World Wide Web: <http://www.flyingmag.com/rectangular-wings> [6] Manish. (2011,September,14). RC Planes for Beginners [Online]. Available: www.rcplanesforbeginners.net Engineering 8936 January 31, 2012 20 Project Fuga Design Report #1 8. Appendix A: Design Matrices RelativeW eights Propulsion Set-up 1m otorset-up 2m otorsset-up M otor In-runnerm otor O ut-runner brushless brush Blades 2bladepropeller 3bladepropeller 0.15 Thrust RelativeW eights Battery Chem istry Li-CdBattery Li-M HBattery Li-PoBattery Li-IonBattery Set-up 1batteryset-up 2batteryset-up 0.15 RPM 0.25 0.05 LiftCapability Price 0.25 W eight 1 Total 0.75 1.05 0.75 1.05 0.75 0.75 1.25 1.75 0.5 0.25 2.25 1.25 6.25 6.1 0.75 1.05 1.05 0.75 0.75 1.05 1.05 0.75 0.75 1.05 1.05 0.75 1.25 1.75 1.75 1.25 0.35 0.15 0.25 0.25 1.25 1.75 1.75 1.25 5.1 6.8 6.9 5 0.9 0.75 0.9 0.75 0.9 0.75 1.5 1.25 0.25 0.25 1.5 1 5.95 4.75 0.15 0.15 0.15 0.3 0.05 0.2 1 Life Capacity EnergyD ensity Safety Price W eight Total 0.45 0.6 1.35 1.35 0.45 0.9 1.2 1.2 0.45 0.75 1.2 1.2 0.6 1.8 2.4 2.4 0.25 0.25 0.45 0.25 1.2 1.2 1.2 1.2 3.4 5.5 7.8 7.6 0.75 1.05 0.75 1.05 0.75 1.05 1.5 2.1 0.35 0.15 1.4 0.6 5.5 6 RelativeWeights Aerodynamics WingPlacement High Mid Low WingShapes Elliptical Constant Tapered Airfoil Shape 0.15 Torque 0.4 Lift 0.25 Weight 0.15 Stability 0.15 0.05 Controlablilty Price 1 Total 2 2 2 1.25 1.25 1.25 1.5 0.75 0.15 0.75 1.05 1.5 0.25 0.25 0.25 5.75 5.3 5.15 2 3.2 2.8 2 1 1.25 0.75 1.2 0.9 1.05 0.75 0.9 0.25 0.25 0.25 6.05 6.4 6.1 2 1.5 0.75 0.75 0.25 5.25 DeepCamber- 3.2 1 0.75 0.75 0.25 5.95 DeepCamber- 3.2 1.5 0.75 0.75 0.25 6.45 LowLift- 1.2 1.5 1.2 0.75 0.25 4.9 Symmetrical- 1.2 1 1.2 0.75 0.25 4.4 GA(W)-1airfoil- 2.4 1 1.05 0.75 0.25 5.45 Tail Standard Twin Tee Vee 2 2 2 1.6 1.75 1.25 1.25 1.25 0.75 1.05 1.05 0.6 1.05 1.05 0.75 0.6 0.35 0.2 0.25 0.15 5.9 5.55 5.3 4.2 LowCamber- Engineering 8936 January 31, 2012 21 Project Fuga Design Report #1 R e l a t i v e W e i g h t s 0 . 5 0 . 2 5 0 . 1 0 . 1 0 . 0 5 1 C o n t r o l s L i f t W e i g h tS t a b i l i t y C o n t r o l a b i l i t y P r i c e T o t a l E l e v a t o r s + R u d d e r 2 . 5 2 0 . 5 0 . 3 0 . 3 5 5 . 6 5 E l e v a t o r s + R u d d e r + A i l e r o n s 2 . 5 1 . 7 5 0 . 5 0 . 8 0 . 2 5 5 . 8 E l e v a t o r s + R u d d e r + A i l e r o n s + F l a p s 3 . 5 1 . 2 5 0 . 5 0 . 9 0 . 2 6 . 3 5 E l e v a t o r s + R u d d e r + A i l e r o n s + S l a t s 3 . 5 1 . 2 5 0 . 5 0 . 9 0 . 2 5 6 . 4 E l e v a t o r s + R u d d e r + A i l e r o n s + F l a p s + S l a t s 4 . 5 1 0 . 5 0 . 9 0 . 2 7 . 1 Engineering 8936 January 31, 2012 22 Project Fuga Design Report #1 9. Appendix B: Gantt Chart Engineering 8936 January 31, 2012