1 - Rensselaer Hartford Campus - Rensselaer Polytechnic Institute
advertisement

Velocities, Pressures and Temperature Distributions near a Stagnation
Point in Planar Incompressible Flow
by
Eleanor D. Kaufman
An Engineering Seminar Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF SCIENCE
Major Subject: Mechanical Engineering
Approved:
_________________________________________
Ernesto Gutierrez-Miravete, Seminar Adviser
Rensselaer Polytechnic Institute
Hartford, Connecticut
May 2008
CONTENTS
LIST OF TABLES ............................................................................................................ iv
LIST OF FIGURES ........................................................................................................... v
ACKNOWLEDGMENT ................................................................................................ viii
ABSTRACT ..................................................................................................................... ix
INTRODUCTION ............................................................................................................. 1
1) BACKGROUND ........................................................................................................... 2
2) THE GOVERNING EQUATIONS............................................................................... 4
2.1) General Equations of Motion and Energy for a Fluid .......................................... 4
2.2) Viscous Steady Planar Incompressible Flow ....................................................... 5
2.3) Inviscid Steady Planar Incompressible Flow ....................................................... 8
3) INVISCID SOLUTION FOR PLANE STAGNATION FLOW ................................. 10
3.1) Velocity Distribution .......................................................................................... 10
3.2) A Cylinder in Cross-Flow .................................................................................. 14
3.3) Pressure Distribution .......................................................................................... 19
3.4) Temperature Distribution ................................................................................... 23
4) VISCOUS SOLUTION FOR PLANE STAGNATION FLOW ................................. 32
4.1) Viscous Planar Stagnation Flow in the Vicinity of the Stagnation Point ........... 32
4.2) Similarity Solution ............................................................................................. 37
4.3) Method for Numerical Solution of the Hiemenz Equation [3.2.6] ..................... 41
4.4) Velocity Distribution in Viscous Planar Stagnation Flow ................................. 47
4.5) Pressure Distribution in Viscous Planar Stagnation Flow.................................. 50
4.6) Temperature Distribution in Viscous Planar Stagnation Flow ........................... 54
5) COMPUTATIONAL FLUID SIMULATION ............................................................ 60
6) RESULTS: COMPARISON OF INVISCID AND VISCOUS SOLUTIONS ............ 69
6.1) Velocity Distribution .......................................................................................... 69
6.2) Pressure Distribution .......................................................................................... 70
ii
6.3) Temperature Distribution ................................................................................... 74
7) CONCLUSIONS ......................................................................................................... 75
Appendix A: Numerical Solutions to the Hiemenz and Blasius Equations ..................... 77
Appendix B: List of Symbols .......................................................................................... 81
Appendix C: Selected MATLAB Scripts ........................................................................ 84
REFERENCES: ............................................................................................................... 91
iii
LIST OF TABLES
Table 1: Numerical Solution To Hiemenz Equation ……………………..……….……75
Table 2: Numerical Solution to Blasius Equation………………..………...………...…76
iv
LIST OF FIGURES
Figure 1: Planar Stagnating Flow……………………………………………………..…8
Figure 2: Streamlines and Lines of Constant Velocity Potential ……………………....11
Figure 3: x- and y-Velocity Profiles in Inviscid Planar Stagnation Flow ……………...11
Figure 4: Control Volume ……………………………………………………………...12
Figure 5: Flow Approaching A Circular Cylinder ……………………………………..13
Figure 6: Pressure Contours in Inviscid Planar Stagnating Flow ……………………...20
Figure 7: Inviscid Planar Stagnating Flow Pressures Parallel to the Wall …………….20
Figure 8: Inviscid Planar Stagnating Flow Pressure Normal to the Wall …..……….…21
Figure 9: Temperature Profile in Inviscid Planar Stagnating Flow Subjected to a
Constant Wall Temperature……………………………………………………………..27
Figure 10: Steady Planar Viscous Stagnating Flow ……………………………………30
Figure 11: Numerical Solution to the Hiemenz Equation …………………………….. 44
Figure 12: Numerical Solution to the Blasius Equation …………………………….....45
Figure 13: Viscous Streamlines in Planar Stagnating Flow ………………………..… 47
Figure 14: x- and y-Velocity Profiles in Inviscid Planar Stagnation Flow…………… 47
Figure 15: Numerical Solution for the Function F……………………………………..49
v
Figure 16: Pressure Contours In Viscous Planar Stagnating Flow……………………..50
Figure 17: Pressure Profiles along Cuts Parallel to the Wall in Viscous Planar
Stagnating Flow ………………………………………………………………………...51
Figure 18: Pressure Profiles along Cuts Normal to the Wall In Viscous Planar
Stagnating Flow ……………………………………………………………………..… 51
Figure 19: Numerical Result for ∫(x)dx………………………………………………. 53
Figure 20: Numerical Result for exp(-∫(x)dx)…………………………………..……. 54
Figure 21: Numerical Result for ∫exp(-∫(x)dx) )………………………………..……. 54
Figure 22: Temperature Profile in Viscous Plane Stagnation Flow ………………….. 55
Figure 23a: COMSOL Mesh …………..………………………………………………59
Figure 23b: FLUENT Mesh …...………………………………………………………60
Figure 24a: COMSOL Velocity Streamlines ………………………………………….61
Figure 24b: FLUENT Velocity Streamlines …………………………………….……..61
Figure 24c: COMSOL Velocity Field ………...………….……….…….……………..62
Figure 24d: FLUENT Velocity Field………………………….……..…….…………..62
Figure 25a: COMSOL Pressure Contours ………………………………………….….64
Figure 25b: FLUENT Pressure Contours ………………………….…………………..64
vi
Figure 26a: CFD Pressure Profiles at Cuts Normal to the Wall ……………………….65
Figure 26b: CFD and Exact Pressure Profiles at Cuts Normal to the Wall ……………66
Figure 27: Viscous and Inviscid Streamlines in Planar Stagnating Flow ……………..67
Figure 28: x- and y-Velocity Profiles in Viscous and Inviscid Planar Stagnation Flow
…………………………………………………………………………………………..68
Figure 29: Viscous and Inviscid Pressure Contours in Planar Stagnating Flow ..……..69
Figure 30: Viscous and Inviscid Pressure Profile Along the Symmetry Line y=0…..…69
Figure 31: Viscous and Inviscid Pressure Distributions Along Constant x-Cuts ……...70
Figure 32: Viscous and Inviscid Pressure Profile along Lines Parallel to the Wall …...71
Figure 33: Viscous and Inviscid Pressure Profile along Lines Normal to the Wall.….. 71
Figure 34: Viscous and Inviscid Temperature Profiles …………………………..……72
vii
ACKNOWLEDGMENT
I would like to thank everyone, including friends, family, co-workers and especially my
advisor, Ernesto Gutierrez-Miravete, all of whom encouraged, assisted, and harassed me
sufficiently so that I was finally able to complete this project.
viii
ABSTRACT
The Hiemenz solution for planar stagnating flow is explored in detail. Steady, planar
incompressible flow in the vicinity of a stagnation point is explored in both the inviscid
and viscous cases. A numerical technique is employed to solve the Hiemenz equation.
The flow fields, pressure distributions and temperature distribution in the case of
constant wall temperature are derived and presented for a representative nondimensional case. The computational fluid dynamics solvers FLUENT and COMSOL
are also used to solve for the viscous flow field, and these results are compared to the
exact analytical solution.
ix
INTRODUCTION
It is the purpose of this paper to carefully explore the situation of incompressible
planar stagnating flow. Exact solutions to this flow field are available for both the
inviscid and viscous cases. These solutions are of interest in several practical situations,
including that of the heat transfer at the leading edge of an airfoil, which is subjected in
operation to incoming flows at elevated temperatures.
An assumption of
incompressibility is acceptable in the case of incoming Mach numbers of less than 0.3.
In mid-span regions close to the stagnation point, the 2-dimensional planar assumption
can provide useful information.
The flow field, pressure distribution and temperature distribution in the case of
constant wall temperature will be derived for steady, 2-dimensional inviscid,
incompressible flow, starting from the general equations of motion for a fluid in three
dimensions. Subsequently, the inviscid solution will be built upon in the manner of
referenced texts [1], [2] to derive a governing equation for the viscous case, the Hiemenz
equation. The Hiemenz equation will then be solved using a numerical technique. For
comparison, the Blasius equation, describing viscous flow along a flat plate, will also be
solved using a similar technique. COMSOL and FLUENT CFD codes are then used to
review the same problem. Velocities, pressures and temperatures will be presented and
compared for the inviscid, viscous and CFD solutions.
Future work will involve exploring the heat flux in more detail and applying the
methods of Reference [6] to both a cylinder in cross-flow and a representative airfoil.
1) BACKGROUND
As gas turbine engine turbine temperatures and component life requirements
continue to rise, it becomes increasingly important to have a good understanding of the
operating temperatures of turbine components. Subject to some of the highest heat loads
in the engine, turbine airfoils are of particular interest. Oxidation is a significant cause
of turbine airfoil distress, and is a temperature dependent failure mode. Improvements in
external heat load predictions enable design of more efficient airfoil cooling
configurations, which then lead to improvements in efficiency, or Thrust-Specific Fuel
Consumption (TSFC). Accurate simplifications are also of great value as they allow
rapid analysis iterations in the early phases of a design. Recent work at the University of
Connecticut [6] has explored the possibility of approximating the leading edge
stagnation heat transfer coefficient through analogy with the Hiemenz flow solution for
stagnating flow in front of a blunt body. This technique could prove a useful addition to
the current set of external heat load prediction tools.
This project will further explore the technique for predicted airfoil leading edge
external heat transfer coefficient outlined in Reference [6]. Specifically, I will explore
the governing equations defining the basis upon which the technique was built. The
eventual goal is to explore whether a Hiemenz flow approximation based on measured
static pressures near an airfoil leading edge provides a better indication of the leading
edge heat transfer coefficient than a Reynolds’s analogy based on the cylinder in crossflow solution.
Historically, the cylinder in cross-flow solution has been used in
conjunction with a mechanical leading edge diameter. Since CFD predictions are now
readily available as part of airfoil design, the proposed method has the benefit of
providing a more accurate “perceived” leading edge diameter which is based on flow
characteristics around the leading edge.
In this paper, I will review the analytical solution for Hiemenz flow in detail.
Eventually, I hope to apply the new methodology using experimental stagnation point
heat transfer data from published literature. CFD predictions for static pressure can be
used to predict the leading edge heat transfer using the Hiemenz flow analysis. This
2
result can then be compared both to the traditional technique and to CFD predictions for
heat transfer coefficient.
An exact solution to the Navier-Stokes Equations can be found in the case of
stagnating in-plane flow, often described as Hiemenz flow (References [1] & [2]). The
derivation from Reference [1] will be repeated here in more detail. First, the potential
flow solution for stagnating flow will be derived. Then this solution will be used as the
basis to derive the similarity solution for the case in which viscous contributions are not
neglected, and a numerical technique will be used to solve the similarity solution. The
computation fluid dynamics solvers COMSOL and FLUENT are then used to solve for
the same flow field.
3
2) THE GOVERNING EQUATIONS
2.1) General Equations of Motion and Energy for a Fluid
The general equations of motion and energy for a fluid are presented here as a starting
point for subsequent derivations. Conservation of momentum leads to the Navier-Stokes
equations. The general form of the Navier-Stokes equations in a rectangular Cartesian
system of coordinates x-, y- and z- are, respectively:
[1.1.1.a]
Dv
p v 2 v w u v
g y
2 V
Dt
y y y 3
z z y x y x
[1.1.1.b]
Dw
p w 2 w u v w
g z
2 V
Dt
z z z 3
x x z y z y
[1.1.1.c]
Where V uiˆ vˆj wkˆ is the velocity vector and g x , g y , g z are the body forces in the
x-, y-, and z-directions, respectively.
Conservation of mass yields the continuity equation:
u v w
0
t
x
y
z
[1.1.2]
And conservation of energy yields the energy equation, which in a general form in three
dimensions is:
Dh Dp
kT
Dt
Dt
[1.1.3]
4
kT is the vector heat flow per unit area, and Φ is the dissipation function, which for a
Newtonian fluid can be expressed as:
2
2
2
2
2
2
u 2
v
u v w
w v u w v u w
2 2 2
z x y y z z x
x
y
x y z
[1.1.3a]
λ is the “bulk viscosity” which by Stokes theorem can in many situations be said to be
equal to 23 .
2.2) Viscous Steady Planar Incompressible Flow
In the case of steady, 2-dimensional, incompressible flow with constant viscosity these
equations are simplified.
For steady, 2-dimensional flow with constant viscosity, the momentum equations
become:
u
u
p u 2 u v
v g x
2 V [1.2.1.a]
dy
x x x 3
y y dx
dx
u
v
v
p v 2 u v
v g y
2 V [1.2.1.b]
y
y y y 3
x
x y x
u
Adding the incompressibility requirement, continuity becomes:
u v
V 0
x y
[1.2.2]
And for steady, 2-dimensional flow with constant conductivity the energy equation
becomes:
5
h
h
p
p T ˆ T
v u
v k
i
y
x
y
y
x
x
u
ˆj
[1.2.3]
2
2
2
u 2
v v u
u v
2 2
x
y x y
x y
[1.2.3.a]
These can be further simplified via the following manipulations. From the
incompressible continuity equation [1.2.2] we know that V 0 . Using this to
simplify the x-momentum equation [1.2.1.a], we have:
u
u
u
1 p
2u 2u 2 v
v
gx
2
x
y
x
x 2 y 2 xy
Or, rearranging terms:
u
u
u
1 p 2 u 2 u u v
.
v
gx
x
y
x x 2 y 2 x x y
u v
Again from the continuity equation, we know that V 0 , so the
x y
simplified x-momentum equation for the case of steady, 2-dimensional, incompressible
flow with constant viscosity becomes:
u
u
u
1 p 2 u 2 u
v
gx
x
y
x x 2 y 2
Similarly it can be shown that the y-momentum equation becomes:
6
[1.2.4]
u
v
v
1 p 2 v 2 v
v gy
x
y
y x 2 y 2
[1.2.5]
The energy equation can also be simplified given an assumption of incompressibility.
Here the steady, 2-dimensional flow with constant conductivity energy equation [1.2.3]
is repeated:
h
h
p
p T ˆ T
v u
v k
i
y
x
y
x
y
x
u
ˆj
Expanding the Del operator:
2T 2T
h
h
p
p
v u v k 2 2
y
x
y
y
x
x
u
For an incompressible fluid, the enthalpy h varies with temperature as shown (Reference
[1]):
dh c p dT
1
dp
h
T 1 p
cp
x
x x
and
h
T 1 p
cp
y
y y
The incompressible 2-D energy equation becomes:
2T 2T
T
1 p
T
1 p
p
p
u v k 2 2
uc p
u
vc p
v
x
x
y
y
x
y
y
x
Rearranging:
7
2T 2T
T
T
dp
dp
p
p
u
v
v
u v k 2 2
y
dx
dy
x
y
y
x
x
c p u
Combining terms, we get a simple expression for the temperature distribution in a
steady, 2-dimensional, incompressible flow with constant conductivity and viscosity:
2T 2T
T
T
k 2 2
v
y
y
x
x
c p u
[1.2.6]
2.3) Inviscid Steady Planar Incompressible Flow
In the case of inviscid flow in the absence of body forces, these equations are further
simplified.
The x- and y- momentum equations become:
u
u
u
1 p
v
x
y
x
[1.3.1.a]
u
v
v
1 p
v
x
y
y
[1.3.1.b]
Continuity is still:
u v
V 0
x y
[1.3.2]
And for 2-dimensional, inviscid, steady flow with constant conductivity the energy
equation becomes:
8
2T 2T
T
T
k 2 2
v
y
y
x
x
c p u
[1.3.3]
ˆ
ˆ
i and v
If a scalar function can be found such that V , or u
j , then
x
y
from continuity we see that:
u v
V 0
x y
Or equivalently:
2 0
[1.3.4]
So the scalar function must be a solution to Laplace’s equation. Functions such as
can be described as “velocity potential” functions, and flows for which such a function
exists are described as “potential” flows. A velocity potential exists for all irrotational
flows; inviscid incompressible flows fall into this category. Note that in cylindrical
coordinates the velocity components are derived from the velocity potential as follows:
1 ˆ
rˆ and V
.
V , Vr
r
r
9
3) INVISCID SOLUTION FOR PLANE STAGNATION FLOW
3.1) Velocity Distribution
In the case of steady, 2-dimensional inviscid flow stagnating at a rigid boundary as
depicted in Figure 1, near the stagnation point one quadrant of the flow can be described
by a velocity potential 12 B x 2 y 2 , such that u
Bx and v
By .
x
y
Consider flow impinging on a surface as depicted in Figure 1 below:
y
U8
x
Figure 1: Planar Stagnating Flow
The function 12 B x 2 y 2 can be shown to be a solution to the Laplace’s equation
2 0 as follows:
12 B x 2 y 2
[2.1.1]
10
So:
Bx
x
2
B
x 2
and
By
y
2
B
y 2
Substituting these into Laplace’s equation, we see that it is satisfied:
2 2
2 2 B B 0 .
x
y
2
Therefore, is a potential function describing an irrotational flow field, which in this
case happens to be planar. So V :
u
x
[2.1.2.a]
v
y
[2.1.2.b]
Solving for the x and y components of velocity u and v, we find:
u Bx and v By
V Bx iˆ Byˆj
[2.1.3]
Because this is 2-dimensional steady flow, there is also a stream function that exists that
describes the same flow field. We can see that the function Bxy satisfies this
condition:
11
ˆ
V
iˆ
j
y
x
By and
Bx
x
y
V Bx iˆ Byˆj
This is identical to the expression [2.1.3].
Plotting lines of constant illustrates the fluid streamlines in the flow field described by
this velocity vector, and it is apparent that this flow field appears to describe a situation
similar to the stagnation flow depicted in Figure 1.
Figure 2 depicts streamlines for
values of ranging from -0.1 to 0.1 in intervals of 0.01. Figure 3 presents the velocity
profiles. For this situation, we see that the x-velocity depends only on x, and the yvelocity depends only on y.
It is interesting to note that because it is also a solution to Laplace’s equation, is also
the velocity potential describing a flow field orthogonal to this one, considered to be the
conjugate flow field. In this conjugate flow lines of constant are the streamlines, and
V ' By iˆ Bxˆj .
12
Ψ=0
ΔΨ= 0.010
Figure 2: Streamlines and Lines of Constant Velocity Potential
Figure 3: x- and y-Velocity Profiles in Inviscid Planar Stagnation Flow
13
For the case of stagnating flow near a stagnation point, we see that as y approaches zero,
the velocity in the y-direction approaches zero. Similarly as x approaches zero, the
velocity in the x-direction approaches zero. At the point where both x and y are zero,
both the velocity components in the x and y directions are also zero, as this is the
stagnation point. We can see by inspection that this flow field satisfies these conditions:
at x=0, V Byˆj , at y=0, V Bxiˆ , and at x=y=0, V 0 . If a control volume is
constructed between streamlines as depicted by the green dotted line in Figure 4 below,
we see that as x becomes increasingly negative, the velocity in the x-direction should
increase, to satisfy continuity, and similarly as y becomes increasingly positive (for the
flow in the top left quadrant), the velocity in the y-direction should increase. These are
consistent with the velocity profiles shown in Figure 3.
y
U∞
x
Figure 4: Control Volume
3.2) A Cylinder in Cross-Flow
14
It can be shown that the on surface of a cylinder in cross flow near the stagnation point,
the solution for plane inviscid flow is a reasonable approximation of the flow field. In
fact, the inviscid solution describing flow impinging upon a cylinder in cross-flow will
simplify to this flow field in the case of small surface distance s, close to the surface of
the cylinder. That is: when both θ is small and r R .
If my coordinate system is translated so as to be consistent with Figure 5, the velocity
vector [2.1.3] derived above becomes:
V B x R iˆ Byˆj
[2.2.1]
u Bx R and v By
The velocity potential becomes:
12 B x R2 y 2
[2.2.2]
y
U∞
R
r
x
Figure 5: Flow Approaching A Circular Cylinder
For stagnating flow over a circular cylinder, the following has been shown to be a
solution, in cylindrical coordinates:
15
U r cos 1
R2
,
r 2
[2.2.3]
where
vr
R2
R2
R2
U r cos 2 3 U cos 1 2 U cos 1 2
r
r
r
r
[2.2.4.a]
and
R2
1
v
U sin 1 2
r
r
[2.2.4.b]
For small values of θ, lim sin and lim cos 1 , so these become:
0
0
R2
R2
vr U 1 2 and V U 1 2
r
r
[2.2.5]
As R becomes very large, these can be further simplified to
R2
R2
vr U 2 and V U 2
r
r
[2.2.6]
For the streamline on the surface of the cylinder, where r=R, these become:
v r ,r R 0 and v ,r R 2U sin
[2.2.7]
And the velocity on the surface of the cylinder for small values of θ is:
16
v , 1 2U .
[2.2.8]
We can see that in the vicinity of the stagnation point, this approaches the plane
stagnation flow solution, as follows:
According to the coordinate systems I have defined in Figure 4, we have the following
transformations:
x r cos
[2.2.9.a]
y r sin
[2.2.9.b]
u vr cos rv sin
[2.2.9.c]
v vr sin rv cos
[2.2.9.d]
Using these expressions, the velocity for large R and small θ can be expressed in
Cartesian coordinates. Using the expressions [2.2.4.a] and [2.2.4.b], we can calculate
the u-velocity in cylindrical coordinates:
u vr cos rv sin
R2
R2
u U cos 1 2 cos r U sin 1 2 sin
r
r
Simplifying:
R2
R2
u U cos 2 1 2 r sin 2 1 2
r
r
Now substitute r=R:
17
u U 2r sin 2 , for r=R
Noting that sin 2 1 cos 2 , this becomes:
u U 2R 1 cos 2 2U R x cos
For small θ, cosθ approaches 1, so the expression for u-velocity near the stagnation point
on the surface of the cylinder becomes:
u 2U x R
[2.2.10]
Similarly, we can calculate the expression for v-velocity in cylindrical coordinates:
v vr sin rv cos
R2
R2
v U cos 1 2 sin r U sin 1 2 cos
r
r
Simplifying:
R2
R2
v U sin cos 1 2 r 1 2
r
r
r 2 R 2 r 3 rR 2
v U sin cos
2
r
18
r 2 1 r R 2 1 r
v U sin cos
r2
Now substitute r=R:
v 2RU sin cos 2U y cos , for r=R
For small θ, cosθ approaches 1, so this becomes:
v 2U y
[2.2.11]
Examining equations [2.2.10] and [2.2.11], we see that these are of a form equivalent to
equation [2.2.1]. So these simplified expressions for the Cartesian velocity components
near the surface of a cylinder in cross-flow approach the plane-potential flow solution
for stagnating flow, in which the constant “B” is equal to 2U .
3.3) Pressure Distribution
Substituting the velocity vector [2.1.3] into the inviscid planar momentum equations, we
can find an expression describing the pressure distribution.
From the x-momentum equation [1.3.1.a], we have:
u
u
u
1 p
v
x
y
x
[1.3.1.a]
Substituting into this our expressions for velocity [2.1.3]:
u Bx and v By
[2.1.3]
19
u
B
x
u
0
y
v
0
x
v
B
y
B2 x
1 p
x
Rearranging:
p
B 2 x
x
Integrating:
1
p B 2 x 2 fcn y
2
Similarly, from y-momentum [1.3.1.b] we have:
u
v
v
1 p
v
x
y
y
[1.3.1.b]
Substituting into this our expressions for velocity [2.1.3]:
B2 y
1 p
y
Rearranging:
p
B 2 y
y
Integrating:
20
1
p B 2 y 2 fcn x
2
Combining the 2 integrated results, we that:
1
p B 2 x 2 y 2 const
2
[2.3.1]
Specifying a stagnation pressure at the stagnation point:
p x 0, y 0 const p 0
[2.3.2]
The expression for pressure becomes:
p0 p
1
B 2 x 2 y 2 ,
2
[2.3.3]
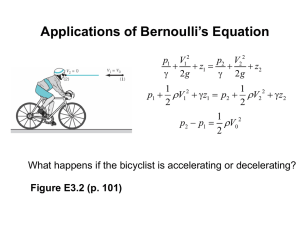
This is equivalent to the result obtained using the familiar Bernoulli equation [2.3.4].
p0 p
1
V 2
2
[2.3.4]
Using our velocity vector:
u Bx and v By
Calculate the velocity magnitude:
V u2 v2
Bx 2 By 2
B x2 y2
Substituting into the Bernoulli equation [2.3.4]:
p0 p
1
1
V 2 B x 2 y 2
2
2
We can see that this is equivalent to expression [2.3.3].
21
The pressure contours for the simple case in which p0 B 1 are plotted in
Figure 6. Pressure profiles at the wall, where x=0, and also at constant x-cuts at x=0.5
and x=1.0 are shown in Figure 7. Pressure profiles for constant y-cuts, normal to the
wall, are shown in Figure 8.
Figure 6: Pressure Contours in Inviscid Planar Stagnating Flow
Figure 7: Inviscid Planar Stagnating Flow Pressures Parallel to the Wall
22
Flow Direction
Upstream of Wall
Wall
Figure 8: Inviscid Planar Stagnating Flow Pressure Normal to the Wall
3.4) Temperature Distribution
Following the derivation presented in Reference [2], we can determine the temperature
distribution corresponding to this inviscid, incompressible, plane stagnation flow. In
section (2.3), the steady, 2-dimensional, incompressible, inviscid energy equation in the
absence of body forces and with constant properties was found to be:
2T 2T
T
T
c p u
v
k x 2 y 2
x
y
[1.3.3]
If we consider the situation of a constant wall temperature Tw , we see that in this case
the temperature can only vary with the coordinate corresponding to distance away from
the wall: T functionx .
23
The energy equation is now simplified to:
2T
T
2
k
x
x
c p u
Or
2T c p
T
2
ux
k
x
x
[2.4.1]
To solve this equation, we first define the dimensionless parameter
T Tw
. At the
T Tw
wall the temperature will be equal to Tw, providing the boundary condition x 0 0 .
Far away from the wall the temperature approaches the freestream temperature, yielding
another boundary condition: x 1.
We see that
T T Tw Tw
[2.4.2]
So
T
T Tw
x
x
[2.4.3.a]
And
2T
2
T Tw 2
x 2
x
[2.4.3.b]
24
Substituting these back into the energy equation we find:
2 c
T Tw 2 p u x T Tw
k
x
x
Dividing both sides by T Tw :
2 c p
2
u x
k
x
x
[2.4.4]
With the boundary conditions
x 0 0 and x 1 .
[2.4.5]
Now, define
x
[2.4.6]
So
2
x x 2
Substituting this into equation [2.4.4]:
c p
u x
x
k
Re-arranging terms:
25
c p
1
u x x
k
Integrating:
ln
c p
k
x
ux dx
1
1
C '1
0
Or:
c p x
c p x
exp
u
x
dx
C
'
C
exp
u
x
dx
1
1
1
1
1
1
k
k
0
0
(Note that x1 is a dummy variable for the integration).
Integrate once more to solve for x :
c p x
C1 exp
u x1 dx1
x
k 0
Or
x
c p
C1 dx 2 exp
k
0
x2
u x dx C
1
1
0
[2.4.7]
2
Where once again x1 and x2 are dummy variables for the integration.
Applying the boundary condition x 0 0 , we find that C2=0:
x 0 C1 * 0 C2 C2 0
26
And applying the boundary condition x 1, we can solve for C1:
x C1
x
0
C1
c p
dx 2 exp
k
x2
ux dx C
1
0
1
2
1
1
x
c p x2
dx
exp
0 2 k 0 ux1 dx1
[2.4.8]
Substituting these values for C1 and C2 back into [2.4.7] yields:
c p x2
dx
exp
u
x
dx
0 2 k 0 1 1
x2
c p
dx
exp
u
x
dx
2
1
1
0
k
0
x
[2.4.9]
Finally, note that the definition of Prandtl number can simplify this expression:
Pr
k
c p
c p
k
x2
dx
exp
0 2 Pr 0 ux1 dx1
x2
0 dx2 exp Pr 0 ux1 dx1
x
[2.4.10]
27
Now let’s use this expression to determine the temperature distribution in the case of
planar steady inviscid stagnating flow. For this case, we have u Bx . First evaluating
x2
ux dx , we find:
the expression for
1
1
0
x2
x2
2
x2
0 ux1 dx1 0 Bx1dx1 B 2
Substituting this into the numerator of equation [2.4.10] yields:
c p B 2 x
dx
exp
0 2 2k x2 0 dx2
x
Where erf z
2
z
e
t 2
dt
c p B
2k
c p B
2k
2
c p B
exp x2
2k
2
1
c p B
erf x
2k
is the error function (Reference [5]).
0
Citing Reference [5], erf 1 , so the denominator in our expression for is:
c p B 2
dx
exp
x2
2
0
2k
2
2k
k
erf
c p B
2 c p B
[2.4.11]
And the numerator is:
c p B 2
dx
exp
x2
2
0
2k
2
x
2k
erf x
c p B
k
erf x
2 c p B
[2.4.12]
So the expression for the dimensionless temperature distribution in inviscid,
incompressible plane stagnation flow subject to constant wall temperature becomes:
28
x
T x Tw
erf x
T Tw
[2.4.13]
A quick review of the limits indicates that this solution is reasonable:
erf 0 0 T 0 Tw , and erf x 1T x T .
The profile is
plotted below in Figure 9. We can see that for this case, the temperature profile appears
to converge by the time it is 2 units away from the wall.
Figure 9: Temperature Profile in Inviscid Planar Stagnating Flow Subjected to a
Constant Wall Temperature
This expression can now be used to make an estimate of the heat transfer rate close to
the wall. From Fourier’s Law, we have:
29
qw k
T
x
x 0
We just derived an expression for Θ:
x
T x Tw
erf x
T Tw
[2.4.13]
And we know that:
T
T Tw
x
x
[2.4.3.a]
So:
T
T Tw erf x
x
x
Recalling that erf z
2
z
e
t 2
dt , we can see that
0
2
erf x erf x 2 e x
x
x
So
T
2 x2
T Tw
e .
x
[2.4.14]
Evaluating this at the wall:
T
x
T Tw
x 0
2
So the heat flux per unit surface area at the wall is:
30
qw k
T
x
k
x 0
2
T Tw
[2.4.15]
From the definition of heat transfer coefficient we have q w hT Tw , so we can see
that for the case of steady, 2-dimensional, inviscid incompressible flow with constant
properties, the heat transfer coefficient is h k
number as Nu y
2
1.1284k . Defining the Nusselt
hy
2y
, we see that for this case Nu y
1.1284 y , where y in this
k
case is the coordinate defining the distance along the wall from the stagnation point.
The Nusselt number is not very descriptive in this situation, noting that the heat transfer
rate is in fact constant with changing values of y. However, it is a common form in
which to represent heat transfer rate.
31
4) VISCOUS SOLUTION FOR PLANE STAGNATION FLOW
4.1) Viscous Planar Stagnation Flow in the Vicinity of the Stagnation
Point
The potential flow solution for flow in the vicinity of a stagnation point is the basis for
the derivation of the similarity flow solution for viscous flow in the same situation.
Following the derivation as outlined in References [1] and [2], the inviscid stream
function Bxy is modified as follows so that the no-slip condition at the wall can be
satisfied: viscous Bxf y , where the function f depends only on the coordinate y. (For
this section, the co-ordinate system has been rotated 90 degrees as shown in Figure 9
below so as to be consistent with the referenced texts). The viscous velocity components
can then be expressed as:
u
df
and
Bx
y
dy
v
[3.1.1.a]
Bf y
x
[3.1.1.b]
U∞
y
x
Figure 10: Steady Planar Viscous Stagnating Flow
32
To satisfy the no-slip condition at the wall, we have the following boundary conditions:
u
y 0
Bx
v y 0 f
f
y
y 0
0
y 0
0 f
f
y
y 0
0
[3.1.2.a]
y 0
0
[3.1.2.b]
We also know that at a large distance from the wall, the velocity in the x-direction will
approach the inviscid solution U ax , based on an inviscid stream function 0 axy .
u
y
xf ' y y ax f ' y y a
[3.1.2.c]
Because the first derivative of the function f approaches the value a asymptotically, we
can also deduce that its derivative, or the second derivative of the function f, approaches
0 as y approaches infinity:
f '
y
f ' ' ( y ) y 0
[3.1.2.d]
y
It is interesting to note that this logic now continues. That is; once a derivative of a
function asymptotically approaches a constant value, all higher order derivatives of that
function will asymptotically approach zero.
We make the further assumption that the pressure can be described as follows:
p 0 p 12 a 2 x 2 F y
[3.1.4]
Where the constant “a” is based on the inviscid stream function 0 axy .
33
Defining the stagnation pressure p0 as the pressure at the stagnation point, where x=y=0
yields a final boundary condition:
F y y 0 0
[3.1.5]
The expressions for velocity can now be substituted into the 2-dimensional, steady
incompressible momentum equations [1.2.4] & [1.2.5]:
u
u
u
1 p 2 u 2 u
v
gx
x
y
x x 2 y 2
[1.2.4]
u
v
v
1 p 2 v 2 v
v gy
x
y
y x 2 y 2
[1.2.5]
From the definitions for u and v provided in equation [3.1.1], we have:
u
df
Bx
y
dy
and v
Bf y .
x
Differentiating, we find:
u
df
B
x
dy
u
d2 f
Bx 2
y
dy
v
0
x
v
df
B
y
dy
2u
0
x 2
2u
d3 f
Bx
y 2
dy 3
34
[3.1.1]
2v
0
x 2
2v
d2 f
B
y 2
dy 2
So:
2
Du
u
u
d2 f
2 df
2
u
v
B x B xf y 2 B 2 x f ' 2 ff ' '
Dt
x
y
dy
dy
And:
Dv
v
v
df
u v
0 B 2 f y B 2 ff '
Dt
x
y
dy
And:
u v w
df
df
V
B
B
00
x y z
dy
dy
(We knew this to be true from the incompressible steady continuity equation [1.2.2]).
Now we can substitute these results into the momentum equations [1.2.4] & [1.2.5]. The
x-momentum equation becomes:
B 2 x f ' 2 ff ' ' g x
p
Bxf ' ' '
x
[3.1.6]
And the y-momentum equation becomes:
B 2 ff ' g y
p
Bf ' '
y
[3.1.7]
Rearranging the y-momentum equation, we see that
p
is independent of the coordinate
y
x, and our assumption for the viscous pressure distribution [3.1.4] is appropriate in this
regard:
35
p
g y B 2 ff ' ' Bf ' ' function y
y
Further, we can now also see that
2 p
p
0 .
xy x y
2 p
p p
Because
, we can now integrate this result to find that:
xy x y y x
2 p
p
xy dy 0dy x functionx .
This is also consistent with our assumption
[3.1.4].
Now we can substitute the assumed pressure distribution [3.1.4] into the x- and ymomentum equations [3.1.6] and [3.1.7].
p 0 p 12 a 2 x 2 F y
p
a 2 x
x
[3.1.4]
p
12 a 2 F '
y
The x- and y- momentum equations, respectively, become:
B 2 x f ' 2 ff ' ' g x a 2 x Bxf ' ' '
B 2 ff ' g y 12 a 2 F 'Bf ' '
Neglecting body forces & simplifying:
B 2 f ' 2 ff ' ' a 2 Bf ' ' '
36
B 2 ff ' 12 a 2 F ' Bf ' '
We can set the value of the constant B to be 1 without losing generality. This further
simplifies the expressions for x- and y-momentum, and they are now consistent with
equations (5.36) & (5.37) on page 96 of Reference [1].
f ' 2 ff ' ' a 2 f ' ' '
[3.1.8]
ff ' 12 a 2 F ' f ' '
[3.1.9]
These are of course subject to the boundary conditions [3.1.2.a-d] and [3.1.5]:
f
y 0
f ' y 0 F
y 0
0
f ' y a
f ' ' y 0
Because the differential equation [3.1.8] involves f only, and is independent of F, it can
be solved first for the function f(y). The function f(y) is useful on its own, as once it is
known; the velocities u and v are known. And once f is known, it can then be used
together with the differential equation [3.1.9] to determine the function F and
subsequently the pressure distribution.
4.2) Similarity Solution
The difficulty now lies in solving equation [3.1.8]. This problem has been set up so as to
be scalable, so it fits into a category of situations to which the characteristics of
37
similarity can be applied. That is, it has been contrived so as to be dependent on only one
coordinate. This premise aids the solution. At this point, it is convenient to make the
following substitutions, which are consistent with the similarity solution technique. A
similarity coordinate η is defined as a non-dimensional y-coordinate:
y
[3.2.1]
d
dy
And a non-dimensional function is defined as follows:
f y A
[3.2.2]
The derivatives of f y can be derived in terms of :
f ' A '
d
A '
dy
f ' ' A ' '
d
A 2 ' '
dy
f ' ' ' A 2 ' ' '
d
A 3 ' ' '
dy
Note that in these expressions, the prime on the function f denotes differentiation with
respect to y, and the prime on the function denotes differentiation with respect to the
similarity coordinate η.
Substituting these back into the x-momentum equation [3.1.8], and, consistent with its
definition, substituting kinematic viscosity ν for the ratio of viscosity to density μ/ρ, we
see that:
38
f ' 2 ff ' ' a 2 f ' ' '
[3.1.8]
Substituting:
A2 2 ' 2 A * A 2 ' ' a 2 A 3 ' ' '
Rearranging:
A2 2 ' 2 A2 2 ' ' a 2 A 3 ' ' '
Simplifying:
A2 2 ' 2 ' ' a 2 A 3 ' ' '
[3.2.3]
Because when we defined the coordinate η and the function , we selected arbitrary
multiplicative factors, we can now, without loss of generality, set the values of these
constants α and A such that 2 A 2 a 2 and A 3 a 2 .
a
[3.2.4]
A a
[3.2.5]
Note that these choices yield units of length for α and units of length per time for ν,
yielding η and f(η) dimensionless. Now substituting these expressions back into [3.1.8],
we see that the equation for has a simple form:
A2 2 ' 2 ' ' a 2 A 3 ' ' '
[3.2.3]
Rearranging:
a 2 ' 2 ' ' a 2 a 2 ' ' '
39
Simplifying:
' 2 ' ' 1 ' ' '
Finally, rearranging terms, we have the Hiemenz equation:
' ' ' ' ' ' 2 1 0
[3.2.6]
The boundary conditions must now be transformed from f(y) to . We accomplish
this by substituting the expressions [3.1.10], [3.1.11], [3.1.13], [3.1.14] into equations
[3.1.2.a-d]:
1. f ' y 0 0
Substituting:
[3.1.2.a]
A' * 0 A' 0 0
f ' y 0 A '
y 0
' 0 0
2. f
y 0
[3.2.7.a]
0
[3.1.2.b]
Substituting:
f
y 0
A * 0 A 0 0
A
y 0
0 0
[3.2.7.b]
3. f ' y y a
[3.1.2.c]
Substituting:
f ' y A'
y
A'
a
' 1
a
' a ' a
[3.2.7.c]
40
4. f ' ' ( y ) y 0
Substituting:
[3.1.2.d]
f ' ' y A 2 ' '
A ' ' 0
2
y
' ' 0
[3.2.7.d]
Now we have a differential equation for with all required boundary conditions:
' ' ' ' ' ' 2 1 0
[3.2.6]
With:
' 0 0
[3.2.7.a]
0 0
[3.2.7.b]
' 1
[3.2.7.c]
' ' 0
[3.2.7.d]
Equation [3.2.6] is commonly referred to as the Hiemenz equation; named after an early
student of Prandtl who first discovered this exact solution to the Navier-Stokes equations
[2]. An analytical solution to this differential equation has not been found, but a
numerical technique may be employed. One method for such a solution is presented in
the next section.
4.3) Method for Numerical Solution of the Hiemenz Equation [3.2.6]
Commonly used numerical algorithms to solve nonlinear differential equations require
that initial conditions be known for all derivatives of the function. This complicates the
41
solution of the Hiemenz equation, for which we know 0 and ' 0 , but not ' ' 0 . So
to solve this equation, an assumption must be made as to the value of this 2nd derivate.
This value must then be tested and iterated upon until a satisfactory solution has been
found.
For the numerical solution I use a Runge-Kutta algorithm, following the technique
presented in Reference [2]. First, the Hiemenz equation is reformulated as a vector of 1 st
order differential equations. Let the values of the vector Y be equal to the function and
its 1st and 2nd derivatives, as shown:
Y1
Y '
2
Y3 ' '
From the Hiemenz equation, we can write the derivative of the function Y as shown:
' ' ' ' ' ' 2 1 0
[3.2.6]
Y2
Y1 '
d
Y2 ' '
Y3
d 2
Y3 ' ' ' Y2 Y1Y3 1
[3.3.1]
With initial conditions:
Y1 0 0 0
Y 0 ' 0 0
2
Y3 0 ' ' 0 b
[3.3.2]
Where ' ' 0 is not immediately known.
42
In order to determine the appropriate value for the initial condition Y3(0)=b, consider
that we know Y2 ' must approach the constant value of 1. Because ' 1 ,
Y2 asymptotically approaches a constant value. So we know that its slope, or ' ' y
must be approaching zero, as must be all higher order derivatives.
If we consider the
Hiemenz equation in the limit as approaches zero, we find the following result:
lim ' ' ' ' ' ' 2 1 0 0 ' 2 1 0
Or:
1 '2 0
Also since we know that the its first derivative approaches a value of 1, we can deduce
that for very larger values of η, is approximately linear with a slope of 1. That is,
c , where c is some constant value.
If these 2 results are substituted back into the Hiemenz equation, we get an
approximation for large values of η:
' ' '' ' ' ' ' c ' ' 0
'''
c
''
And for large values of η we can also make the approximation c . So, for
large values of η we have:
'''
''
And, solving this:
ln ' ' 12 2 const
' ' Ce
12 2
In Reference [2] White uses the fact that this expression is equal to zero within 5
decimal places by the time η is 4.8 to conclude that for our purposes, η has effectively
reached infinity by the time is equal to 4.8.
43
This can be used to help narrow the range over which we must vary select parameters to
achieve a numerical solution.
The algorithm involves several steps, and utilized a MATLAB subroutine to solve a
differential equation using a 4th order Runge-Kutta technique (Appendix C).
To use the numerical algorithm, several parameters must be specified. First, the initial
conditions must be known. In this case, this means guessing a value for Y3(0)=b.
Second, the range over which to evaluate the difference equations must be determined,
which in this case requires determining xfinal. Third, the step size h for the numerical
algorithm must be determined.
I elected to vary these unknown inputs within a series of nested loops in a MATLAB
routine until the value of the 1st derivative Y2 at the end of the evaluated integral, xfinal,
was equal to 1 within 6 decimal places. (Thus assuming that the selected value for xfinal
was approximately equal to infinity). The basic steps of the algorithm are listed here:
1. Select initial guesses for xfinal, Y3(0)=b, initial numerical algorithm step size h
and initial step size a with which to vary parameter b.
2. Using the 4th Order Runge-Kutta subroutine, solve the difference equation
over the interval from 0 to xfinal using the step size h.
3. Repeat step 2 using successively smaller step sizes h until the value of the Y1 at
xfinal is the same for 2 successive step size iterations within 10-6.
4. Reset the step size h at this point to its value for the previous iteration, as the
solution can be considered to have converged at that step size.
5. Evaluate the value of Y2 at xfinal against the known value at infinity of 1.
44
a. If Y2(xfinal) is greater than 1, then reduce the value of b by the step size
defined for this purpose, a, which should then reduced by a factor of 2 for
subsequent iterations.
b. If Y2 (xfinal) is different from 1 by more than 10-6, increment the value
chosen for b by the step size a.
6. Repeat steps 2-5 until the value of Y2 at xfinal is within 10-6 of 1.
This algorithm is an example of a shooting technique, in which various initial slopes are
selected until the appropriate final value is achieved. I repeated these steps using various
initial guesses for xfinal, Y3(0)=b, h and a and found the solution to be very sensitive.
The calculated solution diverged unless initial guesses were selected from within a fairly
narrow range. The guideline for xfinal determined by White’s asymptotic analysis was
helpful to narrow the range.
For comparison, I also used this algorithm to solve the Blasius equation for viscous flow
over a flat plate and found that solution to be much more orderly. For this case, the
algorithm converged on the same solution given a wide range of input initial guesses for
xfinal, Y3(0)=b, h and a. The differential equation describing Blasius flow is presented
here as equation [3.3.3].
' ' ' ' ' 0
[3.3.3]
Using initial guesses of 5, 1, 0.1 and 0.01 respectively for xfinal, Y3(0)=b, h and a, I
arrived at a satisfactorily converged solution to the Hiemenz equation for which the
appropriate value of Y3(0) was found to be 1.2326. The results for , ' , ' ' are plotted in
Figure 11 below:
45
Figure 11: Numerical Solution to the Hiemenz Equation
And for the Blasius equation, using initial guesses of 6, 0, 0.1 and 0.5 respectively for
xfinal, Y3(0)=b, h and a, I arrived at a satisfactorily converged solution. In this case, I
found that the appropriate value of Y3(0) was 0.4696. The results for , ' , ' ' are plotted
in Figure 12 below:
46
Figure 12: Numerical Solution to the Blasius Equation
These results are also presented in Tables 1 & 2, in Appendix A. The MATLAB
Routines are available in Appendix C.
4.4) Velocity Distribution in Viscous Planar Stagnation Flow
Now that we have determined , we can calculate f. And, once f is known, the velocity
components u and v can be calculated.
We previously defined:
y
[3.2.1]
and
f y A
[3.2.2]
47
And we later decided that:
a
[3.2.4]
and
A a .
[3.2.5]
To be consistent with the results plotted for the inviscid case, select a 1 .
In this case, we see that the function f is equal to , and y = η.
Recalling equation [3.1.1] the velocity vector V uiˆ vˆj can now be determined.
ux
df
dy
and
v f y
[3.1.1]
Rotating the co-ordinate system once again so as to be consistent with the orientation in
parts (2) and (3), these become:
u f x
and
v yf ' x
Streamlines for this velocity field are plotted in Figure 13 below. These streamlines
have been seeded at the same locations as the inviscid streamlines in Figure 2. The
velocity profiles at constant x- and y-cuts are presented in Figure 14. As in the inviscid
solution, the x-velocity varies only with x. However, unlike the inviscid solution, the yvelocity now can be seen to depend on both x and y.
48
Figure 13: Viscous Streamlines in Planar Stagnating Flow
Figure 14: x- and y-Velocity Profiles in Inviscid Planar Stagnation Flow
49
4.5) Pressure Distribution in Viscous Planar Stagnation Flow
The pressure distribution can also be solved for numerically, now that f is known. To do
this, solve the y-momentum equation for F and the pressure distribution. From equations
[3.1.9] and [3.1.5], we have:
ff ' 12 a 2 F ' f ' '
[3.1.9]
F y y 0 0
[3.1.5]
Rearranging equation [3.1.9] to solve for F:
1
2
a2 F'
F'
2
a2
f ' ' ff '
f ' ' ff '
Integrating:
2
F y 2
a
y
0
2
f ' ' dy1 2
a
y
ff ' dy
1
0
Simplifying:
2
2
f y
F y 2 f 'y
a
2
[3.5.1]
50
We can see from the fact that f(0) = f’(0)=0 that the initial condition for F(0)=0 is
satisfied. Additionally, we already have numerical solutions for f and f’ from section
(4.3). These can now be used directly to solve for F, again assuming a value of a=1.
The numerical solution for F is also included in Table 1, and the MATLAB algorithm is
included in Appendix C. The solution is presented graphically in Figure 15.
Figure 15: Numerical Solution for Function F
These solutions are good to six significant figures, consistent with data tables available
in the referenced texts. If additional precision is desired, the algorithms can be easily
modified. Changing the convergence criteria from 10-6 to 10-7 or smaller will improve
the precision, but at the cost of increased solution time.
Recalling equation [3.1.4] we have enough information now to solve for the pressures in
the viscous flow field.
51
p 0 p 12 a 2 x 2 F y
[3.1.4]
Transforming coordinate systems once again for consistency in the figures, this
becomes:
p 0 p 12 a 2 y 2 F x
Contours of constant pressure for the case in which p0=1 are presented in Figure 16. The
pressure profiles along cut parallel to the wall are presented in Figure 17, and along cuts
normal to the wall in Figure 18. The pressure decays more rapidly as one moves away
from the wall in this case than in the inviscid case.
Figure 16: Pressure Contours In Viscous Planar Stagnating Flow
52
Figure 17: Pressure Profiles along Cuts Parallel to the Wall in Viscous Planar
Stagnating Flow
Flow Direction
Upstream of Wall
Wall
Figure 18: Pressure Profiles along Cuts Normal to the Wall In Viscous Planar
Stagnating Flow
53
4.6) Temperature Distribution in Viscous Planar Stagnation Flow
In a similar fashion, now that the velocity distribution is known, the temperature
distribution in the case of constant wall temperature can also be determined numerically.
This derivation is similar to the inviscid case up to the point of equation [2.4.10].
x2
0 dx2 exp Pr 0 ux1 dx1
x2
0 dx2 exp Pr 0 ux1 dx1
x
[2.4.10]
Recall that our coordinate system has been inverted, so to be consistent with the current
derivation, this becomes:
y2
Pr v y1 dy1
dy
exp
2
0
0
y2
0 dy 2 exp Pr 0 v y1 dy1
y
[3.6.1]
Reverting now to the earlier coordinate system, so as to be consistent for plotting, we
have the following expressions for the velocities:
u f (x )
and
v yf ' x
[3.1.1]
Assuming once again that a 1 , we have Pr=1. Recall also that for this
case f is equal to , and y = η.
So:
54
x2
dx
exp
0 2 0 x1 dx1
x2
0 dx2 exp 0 x1 dx1
x
[3.6.2]
This can be solved numerically now that we have a solution for . The integral of
x is shown in Figure 19. (Note that in Figures 19-21 the sign of coordinate x is
inverted from that of our example).
Figure 19: Numerical Result for ∫(x)dx
x
From this we can calculate exp x1 dx1 . Adding this function to the graph in
0
Figure 20, we see that it converges on a value of zero as the value of x increase, or as we
get farther and farther from the wall. This is a good sign, indicating that the integral in
the denominator of equation [3.6.2] will converge to some value, and Θ will converge to
1, as expected.
55
Figure 20: Numerical Result for exp(-∫(x)dx)
Figure 21: Numerical Result for ∫exp(-∫(x)dx)
56
Now we can evaluate the outer integral. Adding this expression to the graph in Figure
21, we can see that it appears to converge at around x=3. Inspecting the numerical data
enables us to confirm that the expression indeed reaches 99% of its eventual value at
x=3.1. This data is included in Table 1. Referring to Table 1 we determine that the
denominator in [3.6.2] is 1.7529. The viscous dimensionless temperature distribution Θ
can now be evaluated readily, and is presented in Figure 22. The temperature in this case
appears to converge at about 3 units away from the wall. (Again, note that relative to
our example case, the sign of the coordinate x has been inverted in Figures 19-21).
Figure 22: Temperature Profile in Viscous Plane Stagnation Flow
To determine the heat flux and Nusselt number for the viscous case, we’re interested in
the derivative of the temperature distribution at the wall. Here I will repeat the steps
from section II.D. From Fourier’s Law, we have:
qw k
T
x
x 0
We have an expression for Θ:
57
x2
dx
exp
0 2 0 x1 dx1
x2
0 dx2 exp 0 x1 dx1
x
[3.6.2]
And we know from our definition for Θ that:
T
T Tw
x
x
[2.4.3.a]
Evaluating the derivative of Θ:
x
exp Pr x1 dx1
0
x1
x
0 dx2 exp Pr 0 x1 dx1
Evaluating this at y=0 yields:
y y 0
0
exp Pr x1 dx1
0
x2
Pr x1 dx1
dx
exp
2
0
0
Or:
x
x 0
exp 0
=
x2
x
dx
exp
Pr
0 2 0 x1 dx1
x 0
1
x2
dx
exp
Pr
0 2 0 x1 dx1
As in Reference [2], here I will define a function G(Pr).
58
GPr
1
[3.6.3]
x2
dx
exp
Pr
0 2 0 x1 dx1
Now I can write the derivative of Θ in a simple form, in terms of the Prandtl Number:
x
G(Pr)
[3.6.4]
x 0
And we can express the heat flux per unit area at the wall as equation [3.6.5].
qw k
T
x
k T Tw GPr
[3.6.5]
x 0
Once again recall that the heat transfer coefficient h can be defined as q w hT Tw .
So h kG(Pr) , and Nu y
hy
G (Pr) x .
k
For the case where Pr = 1 with incoming velocity coming from the left, we have already
determined that
x2
dx
exp
0 2 0 x1 dx1 1.7529 .
[3.6.6]
So we can calculate G(1).
G 1
1
0.5705 .
1.7529
[3.6.7]
From this result, we can determine that for the viscous case where Pr = 1:
h 0.5705k and Nu y 0.5705 y . These are consistent with the results presented in
Reference [2], equation (3.176). Recall that for the inviscid case, h 1.1284k .
59
5) COMPUTATIONAL FLUID SIMULATION
Both COMSOL and FLUENT flow solvers were also used to study the viscous flow
field in the case of a 2-dimensional, steady, incompressible flow with constant
properties. It became apparent early in this exercise that selection of appropriate domain
and boundary conditions are essential to obtaining a solution consistent with the ideal
cases explored in the analytical part of this project. Several variations on the geometry
were investigated:
1) Employing a symmetry boundary condition or modeling both sides of the
flow
2) Adding length to move the boundary condition effects away from the region
of interest, at both the inlet and / or the outlet
3) Applying the inlet condition along the entire face opposite the wall or only
along a finite region
Boundary conditions were also varied:
1) Both pressure and velocity inlet and exit boundary conditions were
investigated
2) The boundary opposite to the wall was modeled as either a free boundary or a
wall
3) Inlet and exit boundary condition profiles were investigated
Each of these cases exhibited streamlines qualitatively consistent with the analytical
solutions.
Qualitatively, pressure contours were also generally consistent with the
analytical solution in the vicinity of the stagnation point. However, pressure magnitudes
did not generally agree well with the exact solutions.
The most successful case was one in which the domain was 6 units by 6 units, and inlet
and exit boundary conditions were specified so as to be consistent with the boundary
conditions used in the analytical case. (A “unit” represents the similarity co-ordinate η.
In the simulations, a unit was 1 meter).
In order to be consistent with the analytical
60
case, the density was set to 1 kg/m3 and viscosity was set equal to 1 kg/ms
( 0 ). The domain size of 6 was sufficient to ensure that the boundaries were
effectively at far field; i.e. the velocities should have asymptotically achieved their farfield character by the boundaries of the domain. This was established based on the
viscous exact solution, for which 99% of far-field conditions are achieved at 3 units from
the wall. Note that for these cases the coordinate system is once again rotated. The inlet
is along the line y=6 at the top of the domain. The exit is along the line x=6 on the right
side of the domain. The symmetry line is at x=0 and the no-slip wall is at y=0. The
COMSOL and FLUENT meshes are shown in Figures 23 (a) and 23(b):
Figure 23a: COMSOL Mesh
61
Figure 23b: FLUENT Mesh
The inlet velocity was set such that u=x and v=-5.3521. The inlet x-velocity comes from
the boundary condition U ax far from the wall, and the inlet y-velocity was based on
the results of the viscous exact solution. The specified inlet x-velocity defines the final
parameter, a, required to ensure that the case is properly non-dimensionalized:
U y ax a 1 . The inlet y-velocity is equal to the analytical prediction at
y=η=6. The exit pressure was specified so as to be consistent with the analytical
prediction at x=6, though the reference pressure p0 was set to 100 Pa rather than 1.
Streamlines are plotted in Figures 24a and 24b. The velocity fields are shown in Figure
24c and 24d. It can be seen that the velocity fields predicted by these 2 codes are nearly
identical, with a maximum value of 8.04 m/s in each case. This maximum value is also
consistent with the viscous exact solution, in which at the corner (x,y)=(6,6) we have a
velocity vector (u,v)=(6,-5.3521), with a magnitude of 8.04 m/s. The inviscid solution
predicts a higher velocity magnitude at this corner of 8.49 m/s.
62
Figure 24a: COMSOL Velocity Streamlines
Figure 24b: FLUENT Velocity Streamlines
63
Figure 24c: COMSOL Velocity Field
Figure 24d: FLUENT Velocity Field
64
The pressure contours from COMSOL and FLUENT are shown in Figures 25a and 25b.
They are close in shape to the analytical solution, and in each case indicate a stagnation
pressure very close to the specified value of 100 Pa. The contours are, however, slightly
different between the 2 codes. This could be attributable to differences in mesh density,
visible in Figures 23a and 23b, the density of applied boundary condition profiles, which
was comparable to the mesh density in the FLUENT case but finer than the COMSOL
case, and perhaps also to solver differences.
Pressure profiles along cuts normal to the wall are presented in Figure 26a. Note that
these are presented along a greater distance from the wall than the earlier profiles from
the analytical solution; earlier charts limited the domain to 1 unit, while these encompass
6 units. Additionally note that the coordinate system is rotated relative to the earlier
exercises; here the fluid is coming from the positive y-direction. We can see in these
figures that the pressure decays more slowly closer to the symmetry plane, and more
rapidly as we move away from it, consistent with our earlier results. We can also see
from these profiles that there is reasonably good agreement between the 2 computational
solvers.
The CFD pressure profiles along cuts normal to the wall are compared with the exact
viscous and inviscid solutions in Figure 26b. The domain in these charts has been
reduced to 1 unit in size, and the analytical solution was re-assessed based on a reference
pressure of 100 rather than 1. In these charts, the COMSOL solution appears to agree
more closely with the analytical viscous solution than the FLUENT solution. Again,
there are several possible explanations for this difference including mesh density,
density of applied boundary condition profiles, and solver differences.
However the
differences are slight; the entire pressure axis in Figure 26b varies only by 4 Pascals.
65
Figure 25a: COMSOL Pressure Contours
Figure 25b: FLUENT Pressure Contours
66
Pressure Profile at Sym m etry Plane (X=0)
Flow
Direction
FLUENT
COMSOL
6
6
5
5
4
4
Y coordinate (m)
Y coordinate (m)
Upstream
of Wall
COMSOL
Pressure Profile at X=0.5m
3
2
3
2
1
1
Wall
0
0
80
85
90
95
100
105
80
85
Pressure (Pa)
Flow
Direction
FLUENT
COMSOL
6
6
5
5
4
4
3
2
1
Wall
95
100
105
Pressure Profile at Exit (X=6.0m )
Y coordinate (m)
Y coordinate (m)
COMSOL
90
Pressure (Pa)
Pressure Profile at X=1.0m
Upstream
of Wall
FLUENT
FLUENT
3
2
1
0
0
80
85
90
95
100
105
60
Pressure (Pa)
65
70
75
80
Pressure (Pa)
Figure 26a: CFD Pressure Profiles at Cuts Normal to the Wall
67
85
Pressure Profile at X=1.0m
Pressure Profile at X=0.5m
Flow
Direction
COMSOL
FLUENT
COMSOL
FLUENT
Hiemenz
Inviscid
Hiemenz
Inviscid
0.9
0.8
0.8
0.7
0.7
Wall
1
Y coordinate (m)
Y coordinate (m)
Upstream 1
of Wall 0.9
0.6
0.5
0.4
0.6
0.5
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
98
99
100
101
98
102
99
100
101
102
Pressure (Pa)
Pressure (Pa)
Pressure Profile at Sym m etry Plane (X=0)
Flow
Direction
COMSOL
FLUENT
Hiemenz
Inviscid
Upstream 1
of Wall 0.9
0.8
Y coordinate (m)
0.7
0.6
0.5
0.4
0.3
0.2
0.1
Wall
0
98
99
100
101
102
Pressure (Pa)
Figure 26b: CFD and Exact Pressure Profiles at Cuts Normal to the Wall
68
6) RESULTS: COMPARISON OF INVISCID AND VISCOUS
SOLUTIONS
6.1) Velocity Distribution
Overlaying the viscous and inviscid streamlines as in Figure 27, it becomes apparent that
the inviscid streamlines get closer to the wall before diverging. This same trend is
visible in Figure 28, where the viscous and inviscid velocity profiles can be compared.
As x increases, indicating greater distance from the wall, the viscous y-velocity
approaches the inviscid solution.
Figure 27: Viscous and Inviscid Streamlines in Planar Stagnating Flow
69
Figure 28: x- and y-Velocity Profiles in Viscous and Inviscid Planar Stagnation
Flow
6.2) Pressure Distribution
The pressure contours are overlayed in Figure 29. The pressure profile along the y=0
symmetry line is shown in Figure 30. Figure 31 depicts the decay of the pressure profile
along cuts parallel to the wall. It can be seen in this series of charts that while both the
inviscid and viscous pressure distributions are identical at the wall, the inviscid pressure
distribution decays much more slowly as we move away from the wall, consistent with
expectations.
70
Figure 29: Viscous and Inviscid Pressure Contours in Planar Stagnating Flow
Figure 30: Viscous and Inviscid Pressure Profile Along the Symmetry Line y=0
71
Figure 31: Viscous and Inviscid Pressure Distributions Along Constant x-Cuts
Overlaying the pressure profiles at constant x- and y- cuts in Figures 32 and 33, the same
trend is visible. In these views, we see though they start at the same value, at a distance
of 0.5 from the wall the inviscid pressure profile has already decayed to the same level
that the viscous pressure profile reaches at a distance of 1.0 from the wall. It is expected
that frictional contributions to the flow behavior will slow the decay rate. In a viscous
flow field, the fluid particles transfer energy to each other via frictional interactions and
thus the influence of the wall is felt farther into the domain.
72
Figure 32: Viscous and Inviscid Pressure Profile along Lines Parallel to the Wall
Figure 33: Viscous and Inviscid Pressure Profile along Lines Normal to the Wall
73
6.3) Temperature Distribution
The viscous and inviscid temperature profiles for the case of constant wall temperature
and Pr=1 are presented below in Figure 34. As expected, we can see that the viscous
temperature profile converges more slowly than the inviscid profile.
Figure 34: Viscous and Inviscid Temperature Profiles
The steeper slope of the inviscid profile near the wall hints that the predicted heat
transfer coefficient for this case is higher than for the viscous case. The predicted
Nusselt number in the inviscid case, Nu 1.1284x , is about 2 times that for the viscous
case Nu 0.5705x . The addition of friction to a stagnation flow field actually slows the
rate of convection between the fluid and the wall.
74
7) CONCLUSIONS
This study has revealed the details of viscous and inviscid planar stagnation flow.
The basic equations and solutions have been carefully derived and presented.
A
shooting algorithm was used with a Runge-Kutta numerical technique to solve the nonlinear Hiemenz equation describing the viscous flow. Velocities, pressures and
temperatures have been compared for a simple, dimensionless case. This investigation
has highlighted some expected distinctions between the viscous flow field and the
inviscid approximation. These include:
Streamlines diverge farther from the wall in the viscous case
Pressures decay more rapidly in the inviscid case
Temperatures approach freestream levels more rapidly in the inviscid case
Each of these conclusions is an expected result of frictional interaction between fluid
particles. In a viscous flow field, the fluid particles transfer energy to each other via
frictional interactions and thus the influence of the wall is felt farther into the domain.
Thus velocities, pressures and temperature all decay more slowly in a viscous flow field
than in an inviscid flow field. This result can be applied to many situations in addition
to the case of Hiemenz flow presented here.
In addition to these expected results is an interesting result that I did not anticipate:
The Nusselt number at the wall in the inviscid case is about twice that of the
viscous case.
Thus, the addition of friction to a stagnation flow field actually slows the rate of
convection between the fluid and the wall.
In addition, these results were compared to two CFD simulations. The COMSOL
and FLUENT simulations were shown to be reliable for predicting the velocity field and
75
pressure distribution, with the COMSOL result showing slightly closer agreement to the
exact solution than the FLUENT result.
Initial differences in the pressure contours
predicted by both computational solvers were resolved by careful application of
boundary conditions consistent with the analytical solution, and by selecting a sufficient
domain for calculation. This experience underscores the need for great care in use of
finite element software packages, which can be exremely powerful tools when used
properly, but can also provide misleading results to the inexperienced user.
Future work will involve employing the Multi-Physics capability of the COMSOL
software package to calculate the predicted heat flux result and compare it to the exact
solutions presented here.
Additionally, these results have developed the framework
upon which now can be built a better understanding of the modeling technique described
in Reference [6]. Future work will also involve applying this technique to both a
cylinder in cross-flow and a representative airfoil.
76
Appendix A: Numerical Solutions to the Hiemenz and Blasius
Equations
Table 1: Hiemenz Solution
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2.0
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3.0
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
0.000000
0.005996
0.023322
0.050995
0.088057
0.133585
0.186701
0.246573
0.312423
0.383529
0.459227
0.538910
0.622028
0.708089
0.796652
0.887329
0.979779
1.07371
1.16886
1.26501
1.36197
1.45960
1.55776
1.65634
1.75525
1.85443
1.95381
2.05334
2.15300
2.25274
2.35256
2.45242
2.55233
2.65226
2.75221
2.85217
2.95215
3.05213
3.15212
3.25211
'
0.000000
0.118265
0.226612
0.325241
0.414456
0.494649
0.566281
0.629861
0.685937
0.735079
0.777865
0.814873
0.846671
0.873808
0.896809
0.916168
0.932348
0.945774
0.956834
0.965877
0.973217
0.979128
0.983853
0.987601
0.990549
0.992851
0.994634
0.996003
0.997046
0.997834
0.998424
0.998863
0.999186
0.999422
0.999593
0.999716
0.999803
0.999865
0.999908
0.999938
''
1.23259
1.13283
1.03445
0.938631
0.846325
0.758308
0.675171
0.597350
0.525131
0.458672
0.398013
0.343096
0.293776
0.249836
0.211003
0.176958
0.147351
0.121813
0.099964
0.081425
0.065825
0.052809
0.042040
0.033205
0.026020
0.020227
0.015597
0.011929
0.009049
0.006807
0.005078
0.003756
0.002755
0.002003
0.001444
0.001032
0.000731
0.000514
0.000358
0.000247
77
F
0.00000
0.23657
0.45377
0.65308
0.83667
1.0071
1.1674
1.3205
1.4695
1.6173
1.7666
1.9202
2.0803
2.2490
2.4283
2.6197
2.8247
3.0444
3.2799
3.5320
3.8014
4.0887
4.3943
4.7187
5.0620
5.4246
5.8066
6.2082
6.6295
7.0705
7.5314
8.0121
8.5127
9.0333
9.5738
10.1343
10.7148
11.3152
11.9357
12.5761
∫exp(-∫(η)dη)
0.00000
0.09999
0.19992
0.29960
0.39877
0.4971
0.5940
0.6892
0.7821
0.8721
0.9587
1.0414
1.1198
1.1935
1.2621
1.3255
1.3835
1.4361
1.4833
1.5253
1.5624
1.5947
1.6227
1.6466
1.6668
1.6838
1.6980
1.7096
1.7191
1.7267
1.7328
1.7376
1.7414
1.7443
1.7465
1.7483
1.7495
1.7505
1.7512
1.7517
4.0
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
5.0
3.35211
3.45211
3.55210
3.65210
3.75210
3.85210
3.95210
4.05210
4.15210
4.25210
4.35210
0.999959
0.999972
0.999982
0.999988
0.999992
0.999995
0.999997
0.999998
0.999999
0.999999
1.000000
0.000169
0.000114
0.000077
0.000051
0.000034
0.000022
0.000014
0.000009
0.000006
0.000004
0.000002
Table 2: Blasius Solution
'
''
0.0
0.000000
0.000000
0.469601
0.1
0.002348
0.046959
0.469564
0.2
0.009391
0.093905
0.469307
0.3
0.021128
0.140806
0.468609
0.4
0.037549
0.187605
0.467255
0.5
0.058643
0.234228
0.465031
0.6
0.084386
0.280576
0.461735
0.7
0.114745
0.326533
0.457178
0.8
0.149675
0.371964
0.451191
0.9
0.189115
0.416718
0.443629
1.0
0.232990
0.460633
0.434380
1.1
0.281208
0.503536
0.423369
1.2
0.333658
0.545247
0.410566
1.3
0.390212
0.585589
0.395985
1.4
0.450724
0.624387
0.379693
1.5
0.515032
0.661475
0.361805
1.6
0.582957
0.696700
0.342487
1.7
0.654306
0.729932
0.321951
1.8
0.728873
0.761058
0.300446
1.9
0.806445
0.789998
0.278251
2.0
0.886798
0.816696
0.255669
2.1
0.969708
0.841129
0.233010
2.2
1.05495
0.863305
0.210580
2.3
1.14230
0.883262
0.188674
78
13.2366
13.9170
14.6174
15.3378
16.0782
16.8387
17.6191
18.4195
19.2399
20.0804
20.9408
1.7521
1.7523
1.7525
1.7527
1.7528
1.7528
1.7529
1.7529
1.7529
1.7529
1.7529
2.4
1.23153
0.901067
0.167560
2.5
1.32244
0.916809
0.147475
2.6
1.41483
0.930602
0.128613
2.7
1.50850
0.942577
0.111124
2.8
1.60329
0.952877
0.095113
2.9
1.69902
0.961651
0.080637
3.0
1.79557
0.969056
0.067710
3.1
1.89279
0.975244
0.056307
3.2
1.99058
0.980366
0.046370
3.3
2.08884
0.984564
0.037814
3.4
2.18747
0.987971
0.030535
3.5
2.28641
0.990710
0.024415
3.6
2.38559
0.992889
0.019329
3.7
2.48497
0.994606
0.015151
3.8
2.58450
0.995945
0.011759
3.9
2.68415
0.996980
0.009035
4.0
2.78389
0.997771
0.006874
4.1
2.88370
0.998370
0.005178
4.2
2.98356
0.998819
0.003861
4.3
3.08346
0.999153
0.002851
4.4
3.18339
0.999398
0.002084
4.5
3.28334
0.999576
0.001508
4.6
3.38330
0.999704
0.001081
4.7
3.48328
0.999796
0.000767
4.8
3.58326
0.999860
0.000538
4.9
3.68325
0.999906
0.000374
5.0
3.78324
0.999937
0.000258
5.1
3.88323
0.999958
0.000176
5.2
3.98323
0.999973
0.000119
5.3
4.08323
0.999983
0.000079
5.4
4.18323
0.999989
0.000052
5.5
4.28323
0.999993
0.000034
5.6
4.38323
0.999996
0.000022
5.7
4.48322
0.999998
0.000014
5.8
4.58322
0.999999
0.000009
5.9
4.68322
1.000000
0.000006
6.0
4.78322
1.000000
0.000004
79
6.1
4.88322
1.000000
0.000002
6.2
4.98321
1.000000
0.000000
6.3
5.08321
1.000000
-0.000002
6.4
5.18321
1.000000
-0.000003
6.5
5.28320
1.000000
-0.000005
6.6
5.38320
1.000000
-0.000007
80
Appendix B: List of Symbols
ˆ ˆ ˆ
i
j k in Cartesian coordinates
x
y
z
DEL Operator =
2
Laplacian Operator =
Ф
Velocity potential function
2
2
2
in Cartesian coordinates
x 2 y 2 z 2
Dimensionless version of the function f
Γ
1st derivative of the dimensionless temperature parameter
Θ
Dimensionless temperature parameter
ψ
Stream Function
η
Similarity variable
λ
Coefficient of bulk viscosity
Viscosity
υ
Kinematic Viscosity
Density
θ
Cylindrical tangential coordinate
B
Freestream velocity factor in inviscid stream function
D
Dt
Total derivative =
R
Cylinder radius
u v w in Cartesian coordinates
t
x
y
z
81
T
Temperature
U
Freestream velocity
V
Velocity vector
a
Freestream velocity factor
Step size
e
mass specific internal energy
gi
The mass-specific body force in direction of i
h
mass specific enthalpy
step size
heat transfer coefficient
iˆ, ˆj , kˆ
Cartesian unit vectors in the x, y and z directions
k
thermal conductivity
p
pressure
p0
stagnation pressure
r
cylindrical radial coordinate
u, v, w
velocity component in x-, y- and z- directions
82
x,y,z
Cartesian x- y- and z- coordinates
Ф
Dissipation function
83
Appendix C: Selected MATLAB Scripts
C.1 Runge-Kutta 4th Order Algorithm
function [tout,yout]=rko4(ypfun,t0,tfinal,y0,N,trace);
%This is a Runge-Kutta Order-Four algorithm to solve ODE Initial
%value problems.
%ypfun is a system of user defined ODEs, (see ODE23 notes)
%t0, tfinal are the inital and final values for t
%y0 is the initial value for the (vector) y
%N is the number of evenly divided subintervals
%Trace allow the user to see each output
% Initialization
if nargin < 7, trace = 0; end
%determine step size
h=(tfinal-t0)/N;
y = y0(:); %turns y into a column
tout=zeros(N+1,1);
yout=zeros(N+1,length(y));
t=t0;
k=1;
tout(k) = t;
yout(k,:) = y.'; %turns y into a row
if trace
clc, t, h, y
end
% The main loop
84
for i=[1:1:N]
K1=h*feval(ypfun,t,y); K1=K1(:);
K2=h*feval(ypfun,t+h/2, y+K1/2); K2=K2(:);
K3=h*feval(ypfun,t+h/2, y+K2/2); K3=K3(:);
K4=h*feval(ypfun,t+h,y+K3); K4=K4(:);
y=y+(K1+2*K2+2*K3+K4)/6;
t=t0+i*h;
yout(i+1,:)=y.';
tout(i+1)=t;
if trace
home, t, h, y
end
end
tout;
yout;
C.2 Shooting Method to Solve Hiemenz Equation:
1. Function to define the differential equation:
function yprime=hiemenz(t,y);
%
yprime=zeros(3,1);
yprime=[y(2);
y(3)
y(2)*y(2)-1-y(1)*y(3)];
2. Function to solve the differential equation:
85
% use various numerical techniques to solve the Hiemenz equation
% desired accuracy to 5 decimal places
% must select appropriate step size, xfinal, and f''(0)
% do this within nested loop:
% 1) select xfinal
% 2) Select guess for f''(0)
% 3) select step size
%
-iterate on step size until change in f is in 6th decimal place at
%
x=xfinal
%
-then iterate on f''(0) until the value of f' at xfinal is 0.999999
%
(trials indicate that as f''(0) increases, f'(xfinal) also
%
increases)
%
-finally, try repeating the exercise with a different xfinal, to
%
see if the results are changed in the 5th or 6th decimal place
%
clear
format long
count=0;
countb=0; %initialize variable to store # iterations
xfinal=5.0; %guess adequate value for xfinal (seems to blow up if xfinal > 3)
fprime2=1.0; %set starting point for f''(0) (blows up if I set to 0)
x0=0;
a=.01; %1st pass step size for f''(0) guess
h=.1; %1st pass step size for numerical algorithm
ypfinal=0; % initialize f'(xfinal) for convergence check
A=['xfinal = ',num2str(xfinal), ', b= ', num2str(fprime2), ', h = ', num2str(h), ', a = ', num2str(a)];
save1=[a ypfinal fprime2 h];
while (abs(ypfinal-1)>10^-6)&(countb<100)
countb=countb+1;
fprime2=fprime2+a;
y0=[0 0 fprime2];
86
counta=0;
yfinallast=0; %initialize yfinallast for step size convergence check
dely_final=1000; %initialize change between trials at successive step sizes to be 1000
while (abs(dely_final) > 10^-6)
N=round((xfinal-x0)/h);
counta=counta+1;
[x,y]=RKO4('hiemenz', x0, xfinal, y0, N, 0);
y1=y(:,1);
y2=y(:,2);
y3=y(:,3);
dely_final=y1(size(y,1))-yfinallast;
fprintf(1,'%15.8f %15.8f %15.8f %15.8f %15.8f %15.8f\n', ...
counta, h, fprime2, y1(size(y,1)), yfinallast, dely_final );
yfinallast=y1(size(y,1));
h=h/2;
end
count=[count; counta];
h=4*h; % increase step size to value at previous iteration, because this was adequate
ypfinal=y2(size(y,1));
save1=[save1 ;
a ypfinal fprime2 h]
if ypfinal>1
fprime2=fprime2-a;
a=a/2;
end
end
plot(x,y1,x,y2,'--x',x,y3,'.')
title('Numerical Solution Attempt for the Hiemenz Equation')
xlabel('\eta')
87
legend('\Phi(\eta)', '{\Phi}''(\eta)','{\Phi}''''(\eta)','Location','NorthWest','Orientation','horizontal' )
gtext('{\Phi}''''''+{\Phi}{\Phi}''''-{\Phi}''{\^2}+1=0');
gtext(A)
gtext(['{\Phi''''}(0)=', num2str(fprime2)])
C.3 Shooting Method to Solve Blasius Equation
1. Function to define the differential equation
function yprime=blasius(t,y);
%
yprime=zeros(3,1);
yprime=[y(2);
y(3)
-y(1)*y(3)];
2. M-file to solve the differential equation
% use various numerical techniques to solve the Blasius equation
% desired accuracy to 5 decimal places
% must select appropriate step size, xfinal, and f''(0)
% do this within nested loop:
% 1) select xfinal
% 2) Select guess for f''(0)
% 3) select step size
%
-iterate on step size until change in f is in 6th decimal place at
%
x=xfinal
%
-then iterate on f''(0) until the value of f' at xfinal is 0.999999
%
(trials indicate that as f''(0) increases, f'(xfinal) also
%
increases)
%
-finally, try repeating the exercise with a different xfinal, to
88
%
see if the results are changed in the 5th or 6th decimal place
%
(where should I check for this??)
%
clear
format long
count=0;
countb=0; %initialize variable to store # iterations
xfinal=6; %guess adequate value for xfinal- tried 6 & 50, essentially identical results
fprime2=0; %set starting point at 0 for f''(0)
x0=0;
a=.5; %1st pass step size for f''(0) guess
h=.1; %1st pass step size for numerical algorithm
ypfinal=0; % initialize f'(xfinal) for convergence check
A=['xfinal = ',num2str(xfinal), ', b= ', num2str(fprime2), ', h = ', num2str(h), ', a = ', num2str(a)];
save1=[a ypfinal fprime2 h];
%while (abs(ypfinal-1)>10^-6) & (sum(count)<10000) & (countb<20)
while (abs(ypfinal-1)>10^-6)
countb=countb+1;
fprime2=fprime2+a;
y0=[0 0 fprime2];
counta=0;
yfinallast=0; %initialize yfinallast for step size convergence check
dely_final=1000; %initialize change between trials at successive step sizes to be 1000
while (abs(dely_final) > 10^-6)
N=round((xfinal-x0)/h);
counta=counta+1;
[x,y]=RKO4('blasius', x0, xfinal, y0, N, 0);
y1=y(:,1);
y2=y(:,2);
y3=y(:,3);
dely_final=y1(size(y,1))-yfinallast;
89
fprintf(1,'%15.8f %15.8f %15.8f %15.8f %15.8f %15.8f\n', ...
counta, h, fprime2, y1(size(y,1)), yfinallast, dely_final )
yfinallast=y1(size(y,1));
h=h/10;
end
count=[count; counta];
h=100*h; % increase step size to value at previous iteration, because this was adequate
ypfinal=y2(size(y,1));
save1=[save1 ;
a ypfinal fprime2 h]
if ypfinal>1
fprime2=fprime2-a;
a=a/2;
end
end
plot(x,y1,x,y2,'--',x,y3,'.')
title('Numerical Solution Attempt for the Blasius Equation')
xlabel('\eta')
%set(gcf,'Units','normalized')
legend('\Phi(\eta)', '{\Phi}''(\eta)','{\Phi}''''(\eta)','Location','NorthWest','Orientation','horizontal' )
gtext('{\Phi}''''''+{\Phi}{\Phi}''''=0');
gtext(A)
gtext(['{\Phi''''}(0)=', num2str(fprime2)])
90
REFERENCES:
1.
Schlichting, H., “Boundary-Layer Theory”, McGraw-Hill Classic Textbook
Reissue, Translated by Dr. J. Keston, New York, 1979
2.
White, Frank M., “ Viscous Fluid Flow”, 2nd Ed., McGraw-Hill, Inc. New York,
1991
3.
Holman, J.P., “Heat Transfer”, Seventh Edition, McGraw-Hill, Inc. New York,
1990
4.
Hildebrand, Francis B., “Advanced Calculus or Applications”, Second Edition,
Prentice-Hall, Inc. New Jersey, 1976
5.
Weisstein, Eric W., "Erf." from MathWorld--A Wolfram Web Resource.
http://mathworld.wolfram.com/Erf.html
6.
Holly, Brian M. and Lee S. Langston, “Analytical Modeling of Turbine Cascade
Leading Edge Heat Transfer using Skin Friction and Pressure Measurements”,
GT2007-28120, Proceedings of GT200 AMSE Turbo Expo 2007: Power for
Land, Sea and Air, May 14-17, Montréal, Canada
91