Final Report - Mechanical Engineering Department

Group Members:
Todd Piercey
Jack Zarczynski
Emran Mojumdar
Dale Fougere
Chad Samson
Mech 4010 – April Design Report
Group 7 - ROV Hovercraft
Supervisor:
Dr. Julio Militzer
Submission Date: April 11, 2005
Table of Contents
1.0 Introduction………………………………………………………………………Page 1
1.1 Problem…………………………………………………………………..Page 1
1.2 Solution………………….…………………………………………….. Page 1
1.3 History of Hovercrafts…………………………………………………... Page 1
1.4 Our Design……………………………………………………………….Page 1
2.0 Deck - Background………………………………………………………………Page 1
2.1 Deck Design Selection………………………………………………….. Page 2
2.2 Deck Dimensions and Material…………………………………………. Page 2
2.2.1 Deck Dimensions…………………………………………………..Page 2
2.2.2 Deck Material…...………………………………………………… Page 2
2.3 Deck Construction………………………………………………………. Page 3
3.0 Lift Fan – Background…………………………………………………………...Page 3
3.1 Lift Fan Design Selection……………………………………………….. Page 4
3.2 Lift Fan Requirements…………………………………………………...Page 5
3.2.1 Calculated Fan Performance Specifications………………………. Page 5
3.2.2 Chosen Fan Dimensions…………………………………………... Page 5
3.2.3 Fan Material………………………………………………………..Page 6
3.3 Selected Lift Fan…………………………………………………………Page 6
4.0 Lift Motor – Background………………………………………………………...Page 6
4.1 Lift Motor Selection…………………………………………………….. Page 6
4.1.1 Motor Dimensions………………………………………………… Page 7
4.1.2 Motor Material……………………………………………………..Page 7
4.2 Motor Related Construction…………………………………………….. Page 8
4.2.1 Motor Mount……………………………………………………… Page 8
4.2.2 Reasons for Design Change………………………………………..Page 8
4.2.3 Coupling of the Fan to the Lift Motor Crank Shaft………………..Page 8
5.0 Skirt – Background………………………………………………………………Page 9
5.1 Skirt Design Selection…………………………………………………... Page 9
5.2 Skirt Design and Construction………………………………………… Page 10
5.2.1 Associated Skirt Dimensions...…………………………………...Page 10
5.3 Skirt Mounting to Deck………………………………………………... Page 10
6.0 Thrust - Background…………………………………………………………... Page 11
6.1 Thrust Design Selection………………………………………………...Page 11
6.2 Thruster Component Selection………………………………………… Page 12
6.3 Thruster Mounting Instructions………………………………………...Page 12
6.3.1 Motor/Base Assembly Instructions…………………………….…Page 12
6.3.2 Motor/Prop Assembly………………………………………….…Page 13
6.4 Thruster Electronics Configuration and Mounting………………....…..Page 14
6.4.1 General Arrangement……………………………………………..Page 14
6.6 Thrusters Status…………………………………………………………Page 15
7.0 Safety Features………………..………………………………………...……... Page 15
7.1 Kill Switch……………………………………………………………...Page 15
7.2 Fan Shrouds……………………………………………………….…….Page 15 i
8.0 Component Placement on Deck………………………………………………...Page 15
9.0 Summary of who will build each component…………………………………..Page 15
10.0 Construction Problems……………………………………………………….. Page 15
10.1 Lift Fan……………………………………………………………….. Page 15
10.2 Lift Engine…………………………………………………………….Page 16
11.0 Testing………………………………………………………………………... Page 16
11.1 Initial Problems………………………………………………………. Page 16
11.1.1 Skirt……………………………………………………………...Page 16
11.1.2 Craft Weight Balance……………………………………………Page 17
11.1.3 Control…………………………………………………………..Page 17
11.2 Test Results……………………………………………………………Page 19
11.2.1 Load Capacity………………………………………………….. Page 19
11.2.2 Terrain Applications……………………………………………. Page 19
11.2.3 Speed…………………………………………………………… Page 20
11.2.4 Hover Height…………………………………………………….Page 21
11.3 Omitted Tests………………………………………………………….Page 21
11.4 Comparison of Required Deliverables..……………………………….Page 22
11.5 Discussion of Results………………………………………………… Page 22
11.6 Was the Problem Solved With our Design?………………………….. Page 23
12.0 Possible Design Improvements (Recommendations)………………………… Page 23
13.0 Conclusions……………………………………………………………………Page 24
14.0 References……………………………………………………………………. Page 25
Appendices…….………………………………………………………....................Page 26
Appendix A – Drawings…………………………………………………… Page 27
Appendix B – Calculations…………………………………………………Page 28
Appendix C – Gant Chart………………………………………………….. Page 29
Appendix D – Budget………………………………………………………Page 30 ii
List of figures
Figure 1 –
Lift Fan…………………………………………………………………...Page 6
Figure 2 –
Coupler…………………………………………………………………...Page 8
Figure 3 –
Skirt Section…………………………………………………………….Page 10
Figure 4 – Skirt Mounting Technique……………………………………………... Page 11
Figure 5 –
Motor Bas Assembly……………………………………………………Page 13
Figure 6
– Motor Prop Assembly………………………………………………….. Page 13
Figure 7 –
Thruster Assembled……………………………………………………. Page 14
Figure 8 – Electronics Arrangement………………………………………………..Page 14
Figure 9 – Reinforced Skirt………………………………………………………... Page 17
Figure 10 – Balancing Technique…………………………………………………..Page 17
Figure 11 – Tail Rotor………………………………………………………………Page 18
Figure 12 – Loaded Craft…………………………………………………………...Page 19
Figure 13 – Water Test…………………………………………………………….. Page 20
Figure 14 – Grass Test……………………………………………………………...Page 20
Figure 15 – Speed Test Prep………………………………………………………..Page 21 iii
List of Tables
Table 1 –
Deck Selection…………………………………………………………… Page 2
Table 2 –
Lift Fan # Selection………………………………………………………. Page 4
Table 3 – Lift Fan Type Selection…………………………………………………... Page 4
Table 4 – Lift Fan Orientation Selection……………………………………………. Page 5
Table 5 –
Lift Motor Selection……………………………………………………… Page 7
Table 6
–
Skirt Material Selection…………………………………………………...Page 9
Table 7 – Thrust Fan Configuration Selection…………………………………….. Page 11
Table 8 – Thrust Motor Type Selection…………………………………………… Page 11
Table 9 – Terrain Results…………………………………………………………...Page 19
Table 10 – Speed Results………………………………………………………….. Page 20
Table 11 – Hover Height Results………………………………………………….. Page 21
Table 12 – Requirements Comparison…………………………………………….. Page 22 iv
1.0 Introduction
1.1 Problem
The problem we addressed for our design project was to transport approximately a 20 lb object from a location on shore to someone located on or across a body of water. To do this some sort of amphibious vehicle would be necessary
1.2 Solution
The solution we decided to go with was to build an ROV hovercraft. The reason we chose to go with this type of vehicle was its unrivaled versatility, and our high level of interest concerning hovercrafts
1.3 Hovercraft History
The first recorded attempt at designing a hovercraft was said to be by a Swedish designer and philosopher named Emmanuel Swedenborg in 1716. The project was short lived due to his realization that the energy necessary to power his design was not available at that period in history. In the mid 1870’s a British engineer named
Sir John Thornycroft built a number of models to help check air cushion effects but again the technology did not yet exist to implement his concepts. Finally in the early 1950’s a British engineer began the first ever testing of hovercrafts, and in 1955 he obtained a patent for a vehicle that was
"neither an airplane, nor a boat, nor a wheeled land craft." Then finally in 1959 the first commercially built hovercraft was used to cross the English Channel, and then in 1962 a
British vehicle became the first to go into active service on a 19 mile ferry run.
1.4 Our Design
The process we took to design our hovercraft was to split it up into its 4 major components, these being: the deck, the lift component, the skirt and the thrust component.
We then analyzed and designed each component separately and throughout this report we will show our progress with respect to each component. After the designs of each component are completed then all components will be assigned an appropriate position on the deck
2.0 Deck - Background
The deck is the main structural component of a remote control hovercraft. All 4 different components will be mounted to the deck. The deck must be rigid, stable, and should not flex under any loads when it hovers. No flexing will allow no anomalies in the air cushion underneath. Ribs will be added to increase the rigidity of the deck. The purpose of the ribs is to hinder the flexing tendency of the deck during operation.
1
2.1 Deck Design Selection
We needed a material that was strong, reasonable cheap, and had a good strength to weight ratio. We decided fiberglass or carbon fiber would be a viable solution for our design requirements. Both materials have a good strength to weight ratio. A table is given below showing the 8 different factors we considered important in choosing our deck material.
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 1 – Deck Selection
After comparing the 2 options carbon fiber seemed to be the best choice, however we were not able to obtain carbon fiber therefore we chose to use fiberglass.
Chosen Material: fiberglass
2.2 Deck Dimensions and Material
2.2.1 Deck Dimensions
Width: 2 ft
Length: 3 ft
Corner radius: 3 inch
Thickness: 3/16 inch
Side wall length: 2 inches from bottom of deck
Side wall thickness: 3/16 inch
See Drawing D1 and D2 for more detail
2.2.2
Deck Material
We ended up changing the deck material to aluminum because it actually ended up being lighter than the fiberglass deck and was cheaper. It also made mounting components to the deck much easier
2
2.3 Deck Construction
Materials Required
- 9 pieces of Aluminum
- 4 of the 9 pieces must be rolled
Tools Required
- Aluminum welder
- Rolling Machine
- Grinder
Deck Construction Procedure
1) 1 - 3' * 2' piece of Aluminum was cut
2) 2 - 22" * 2" pieces of Aluminum were cut
3) 2 - 34" * 2" pieces of Aluminum were cut
4) 4 quarter circle (3" radius) pieces were made with a rolling machine
5) All pieces were welded together
6) Welds were grinded down to a smooth surface
Counter Weights: One concern for overall deck weight balancing is the fact that it may be difficult to obtain perfect balancing. Our solution was to place 4 small pegs at each corner of the deck. Here we would add small counterweights to counter balance any part of the deck that may be over weight due to varying payloads. At these positions we would obtain the largest moments with the smallest weights. The pegs will be approximately ½ inch in diameter and will be approximately 2-3 inches in length. They would also be attached to the deck using high bond glue.
This was one component we did not have time to implement instead we temporarily taped counterweights to the deck to create the appropriate counter balance
3.0 Lift Fan - Background
When the craft is fully loaded, the operating weight will be approximately 65 lbs. The fan itself must provide appropriate corresponding values of flow rate, static pressure and power to obtain the necessary hover height. Another constraint on the lift fan is its size, we need a fan that will fit into a predetermined area as the deck area is finite and many other components need to fit on the deck. We did not design the fan as it somewhat out of our ability; instead we are planning to purchase one that will fit our requirements.
The calculations were based on a 3 ft by 2 ft deck loaded with 65 lbs and hovering at a height of 0.5 inches. The hover height is the distance between the bottom of the skirt and the ground.
3
3.1 Lift Fan Design Selection
The first step in determining how we would generate our lift was to determine how many fans we would use. We decided that the most we could use would be 2 because any more and we would not have enough space for the remaining components. We then decided to compare 1 fan versus 2 fans by formulating the appropriate criteria and assigning rankings based on how well they perform in each category. The results are illustrated below.
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 2 – Lift Fan # Selection
Overall, 1 fan was the better choice because it is much simpler, i.e. the motor could be directly mounted to it whereas with 2, a belt or gear system would be needed which complicates things, and adds more weight to lift. Balancing and stability simply refers to balancing of weight which then improves stability.
The next step in determining the appropriate fan for our application was to determine the type of fan that would best suit our hovercraft. We decided that there were really only 2 different types of fans to choose from, centrifugal and axial. These 2 are the most common fan types and they are the most readily available. To properly determine which of these 2 would best fit our application various criteria were used to examine which type was more advantageous. Using a number system in tabular form we were able to formulate which type we would use. The table is illustrated below:
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 3 – Lift Fan Type Selection
4
Axial was the overall best choice mostly because it is the most readily available fan. If centrifugal fans were as readily available, it would have been chosen simply due to the advantages shown in the table. Axial was determined to be better as far as ease of design and construction simply because with a centrifugal fan a ducting system would be necessary to distribute the air.
Now that the type was chosen to be axial we also wanted to determine what orientation would be the best for our hovercraft, vertical or horizontal. This basically meant that we wanted to know if having a flow parallel, or perpendicular to the ground would be better. To determine this we did the same as before and formulated some criteria to compare each solution. The results can be seen below in tabular form:
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 4 – Lift Fan Orientation Selection
Horizontal orientation was the best choice mostly due to overall simplicity. If vertical was chosen an L-duct system would have had to have been used to properly channel the air to the cushion. This then would have led to considerable pumping losses.
3.2 Lift Fan Requirements
3.2.1 Calculated Fan Performance Specifications
Flow Rate: 2164.73 CFM
Static Pressure: 2.21 in of H
2
O
Fan Power Required: 0.718 HP
This is the bare minimum output required and it is critical to our design that these numbers be provided and preferably exceeded by the lift fan, if not our hovercraft will not hover.
3.2.2 Chosen Fan Dimensions
Outer Diameter: 14 inches
The diameter of the fan is based on how much space of the deck that can be relegated to it, as well as what is commercially available to us. 14 inches is currently the smallest fan that we can obtain without sacrificing performance, we would like something smaller but this will most likely be unfeasible.
5
3.2.3 Fan Material
We do not have much control over the material as it was ultimately dependent on the material of the purchased fan. However it was a consideration in our search. We were ultimately looking for the lightest material that is used in the construction of high performance fans. It seems that aluminum is the material of choice and it is light enough to suit our design.
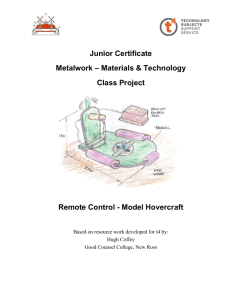
3.3 Selected Lift Fan
The final lift fan that was selected was the 14 inch diameter Aeroflo fan, provided by
Aeroflo Inc. The purchased fan can be seen in the photograph below
14 inch Aeroflo fan
`
`
Material
- Aluminum hub
- 10 Cast nylon airfoil type blades
Performance
2200 CFM, 2.5 inch Static Pressure, 1.88 Hp
@ 3450 rpm and 22° Blade Angle
Figure 1 – Lift Fan
4.0 Lift Motor - Background
The most important part of the Hovercraft is the lift motor. Without it, the fan would not turn, no lift could be generated, and our hovercraft would not hover. This means that determining the necessary power output of a motor is the first calculation that was done.
When the craft is fully loaded, the operating power required is 1.5 horsepower. The motor must produce this much power at a speed the fan is designed for. The main constraint on the lift motor is its weight; we need a light motor so we won’t have to cut back on our payload capacity. We did not design the motor itself because it is much quicker and simpler to procure one that will meet our needs.
4.1 Motor Selection
The first step in determining how we would produce power was to determine how much power we need. We calculated 1.5 HP, but we wanted our motor to be capable of at least twice that much to make up for any losses that may occur. Then we had to choose what type of motor we were going to produce this power with. There were three basic types of motor to choose from; 2 stroke gasoline, 4 stroke gasoline and electric. We compared the
6
three types of motors by using criteria and assigning rankings based on how well they perform in each category. The results are illustrated below.
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 5 – Lift Motor Selection
Overall, in a perfect world, a 2-stroke gasoline engine would be a better choice mainly because of its very favorable power to weight ratio, its inherent simplicity, and the fact that there are many readily available to us for use. However, the RPM range does not suit our application, i.e. the motor cannot be directly mounted to the fan because a 2 stroke’s power band is well above 6000 RPM and the fan is designed to run at 3500 RPM. This would necessitate a belt or gear system to decrease fan speed, which complicates things, and adds more weight. Also, none of the 2 stroke motors available to us had the correct type of mounting arrangement for our application. An electric motor would also have had many advantages, but for one to be used without a tether, it would need very heavy batteries to power it, and because of this it was not used.
We ended up using a 4 stroke gasoline engine rated at 3.75 horsepower at 3500 RPM. It is a Briggs & Stratton model intended for powering a lawn mower.
4.1.1 Motor Dimensions
Length: 10 inches
Width: 6 inches
Height: 6 inches
4.1.2 Motor Material
The engine block is made of Aluminum, like most engine blocks, because it is the lightest and dissipates heat the most rapidly, which is critical with an air cooled engine. The crankshaft is high strength steel.
7
4.2 Motor Related Construction
4.2.1 Motor mount
The motor is mounted on a pedestal that raises it 3.5 inches above the deck. This is so the motor does not obstruct the air intake area. The motor bolts to a circular plate that has four legs connecting it to a square ring surrounding the fan hole. The square ring bolts to the deck.
Leg Dimensions: 4 legs - ¾” OD and 5.5” long
Square ring: inner length of 15”, an outer length of 17” and a thickness of 1/8”
Circular ring: OD of 9”, an ID of 7” and a thickness of 1/8”
All parts are fused together by way of mig welding
Note: The motor’s torque is equal to about 6 lb-ft, However, the maximum induced bending stress is miniscule compared to the strength of the legs.
4.2.2 Reasons for Design Change
It was necessary to change the general design of the motor mount due to the fact that we now had a different motor that we needed to mount to the deck. The same basic design was used for the mount with only slight modifications. We would have used stock bar like we originally had planned but the hollow tubing was much more readily available.
See Drawings MM 0 to MM 3 for more detail of original design
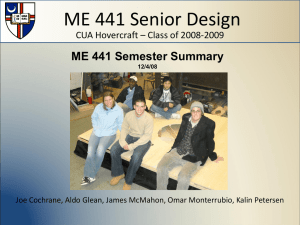
4.2.3 Coupling of the Fan to the Lift Motor Crank Shaft
To properly couple the fan to the lift motor’s crankshaft, a shaft extension was needed because the motor crankshaft is too short for the fan to sit in the hole flush with the deck.
Also the crankshaft diameter is not the same as the purchased fan shaft diameter.
The end of the coupler that couples to the motor is female with an outer diameter of
11/16” and an inner diameter of 7/8” with an inner 1/8” keyway. The end that couples to the fan is male and has a diameter of 1”. There is a 3/8” hole drilled through the length of the coupler to accept a bolt that screws into the crankshaft snout.
This hole is bored to 9/16” for most of its length so the head of the bolt can fit through. The overall length of the coupler is 3.5”. These dimensions produce a part that is exceedingly stronger than it needs to be, but this is acceptable because extra machining would waste
Figure 2 – Coupler
8
resources. Also, the additional rotational moment of inertia the coupler adds helps to stabilize motor operation, somewhat. The thickness of the coupler where the motors crankshaft is accepted into the coupler is fairly thin and because of this, the issue of the keyway creating stress risers was taken into consideration. After an analysis of the stress that may be induced due to the cut keyway we determined that the coupler would be more than strong enough.
5.0 Skirt - Background
When considering lift, the skirt is critical when trying to obtain a stable air cushion. It needs to be flexible and durable. The skirt must also be perfectly sealed so that no air leakage is present when the hovercraft is in operation. Various factors must be considered when constructing a hovercraft skirt: the overall design of the skirt, the skirt material, and the method of mounting the skirt to the deck. All are equally important in obtaining a stable and uniform air cushion.
5.1 Skirt Design Selection
The first aspect of the skirt that was decided upon was the actual type of skirt that was going to be used. We decided that there was really only one choice, a bag skirt. We came to this conclusion simply because it is the most common type of skirt and it is the simplest.
Next we had to come to a decision of what type of material we would use. First we narrowed it down to the 2 most common materials, nylon and Teflon, and then we proceeded to compare them based on various criteria. The results are illustrated below in tabular form:
Note: W.F. = Weighting Factor, W/O W = Without Weighting, WW = With Weighting
Table 6 – Skirt Material Selection
Nylon proved to be better than Teflon, due mainly to cost. It was evident that each material performed equally in each category, however Nylon is much cheaper than
Teflon and this is why Nylon was chosen as our skirt material.
9
5.2 Skirt Design and Construction
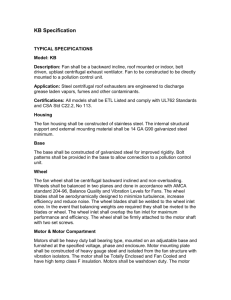
In most hovercraft skirts, the perimeter of the skirt at the bottom is approximately 90% of the skirt perimeter at the top (where the skirt is mounted to the deck). This is done so that the skirt is slightly tucked underneath the craft, effectively forming the air cushion.
4 skirt sections were cut from one large sheet of vinyl coated nylon. Each piece corresponds to the 4 separate sections of the deck perimeter. 2 separate sections for the longitudinal portions of the deck and 2 for the transverse portions of the deck. Each section will have a “V” shape and this is to ensure that the perimeter at the bottom is less than at the top, see the illustration below
Figure 3 – Skirt Section
Each skirt section was sewed together using high strength Kevlar thread.
5.2.1 Associated Skirt Dimensions
Skirt Sections Width: 4 inch
Riveted Skirt Sections: 2 inches of the skirt will be in contact with the deck side walls
Sheet Aluminum width: 1 inch
Sheet Aluminum thickness: 1/8 inch
Sheet Aluminum length: It will cover the entire perimeter of the inside and outside of the deck sidewalls, approximately 20 feet total, 10 ft for both inside and outside aluminum rings
See Drawing S2 in appendix A for more detail
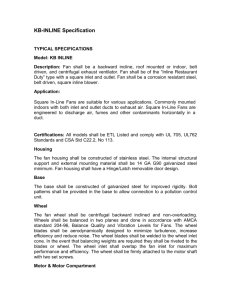
5.3 Skirt Mounting to Deck
To mount the skirt to the deck, the skirt itself was sandwiched between the outside of the deck sidewalls and a ring of 10 gage sheet aluminum lining the outer perimeter.
Aluminum rivets were used to keep the skirt, aluminum ring and deck together. Holes were drilled approximately 1 inch apart throughout the entire deck side wall perimeter.
10
Figure 4 – Skirt Mounting Technique
For a rough diagram of this mounting technique see drawing S-1 in Appendix A
6.0 Thrust - Background
The thruster’s primary function on a hovercraft is to move the hovercraft forward, backward and to provide steering. In this application, the thrusters should be able to move the hovercraft at about 10 km/hr in a reasonable amount of time. Based on a 65lb hovercraft weight, a total thrust of 2 lb was calculated to be suitable for the hovercraft.
This was calculated from online research and basic physics equations. See Appendix B for sample calculations.
6.1 Thrust Design Selection
The standard thrust configuration for R/C hovercrafts is to use either one or two propellers located in the rear with a choice between gas and electric power. Using these constraints, the group devised three (3) methods of thrust for the hovercraft. The selection process is summarized in the following two charts. The columns show design selections, and each row has a criteria with a given weight factor. A highlighted cell indicates the best design for the criteria.
Table 7 – Thrust Fan Configuration Selection
11
Table 8 – Thrust Motor Type Selection
From the table, it is apparent that the dual propeller option with electric power is the ideal solution. The main reason why it is the best is because it uses electric power. This offers simpler and more controllable thrust because of speed control capability and because electric motors are easier to configure and maintain than gas engines. Electric motors allow for reverse thrust whereas gas motors do not. The only real drawback from the other options is that the electric motors don’t run as long as gas motors. However, this drawback can be minimized by using more battery packs configured in parallel.
6.2 Thruster Component Selection
Once the design was selected, the next step was to acquire the equipment which gave the desired performance. This was done through a local supplier, Mighty Small Cars, who were able to select the appropriate R/C gear for our application. To accomplish the design requirement, the following equipment was used for each thruster:
1 – GWS 350 electric motor (Purchased)
1 - sheet metal pedestal (Manufactured - see Drawing)
1 - 10 inch diameter plastic propeller (Purchased)
The electrical system consisted of 4 components:
1 - 6 Channel Radio/Receiver
6 – 7.2V Battery packs, (3 in parallel for each motor)
2 – Reversible Speed controllers
Delta Mixer (for dual motor control)
Wiring (20 Amp)
6.3 Thruster Mounting Instructions
6.3.1 Motor/Base Assembly Instructions
Next the motor and mount was attached to the sheet metal pedestal using small bolts. The sheet metal base was fabricated using shears and a metal break. See drawing below.
12
Figure 5 – Motor base assembly
See drawings BTF 1 and BTF 2 for details on sheet metal base in Appendix A
6.3.2 Motor/Prop Assembly Instructions
The propeller was attached to the motor shaft using a standard prop shaft adapter from
Mighty Small Cars. The adapter slides on the motor shaft and is locked in place with a bolt and Allen key. The prop is held in place on the adapter shaft using a locking nut at the end of the shaft. See diagram below for attachment details.
Figure 6 – Motor prop assembly
13
This is what the thrusters look like once assembled.
Figure 7 – Thruster Assembled
6.4 Thruster Electronics Configuration and Mounting
6.4.1 General Arrangement
The electrical components were ordered from Mighty Small Cars. Therefore, the only work involved with the electronics is soldering and wiring.
The battery packs, speed controllers, and receiver are attached to the deck using 2-Sided foam tape. See diagram for basic arrangements
Figure 8 – Electronics arrangement
Speed Controllers Receiver
Batteries
Thrusters
14
7.0 Safety Features
7.1 Kill Switch
The only important safety feature on our hovercraft is the remotely operated kill switch.
What this is, is a servo that closes the ignition circuit and effectively kills the engine by grounding the ignition system
7.2 Fan Shrouds
The fan shrouds were originally planned to enclose the thrusters but eventually became a side issue to the many problems we faced during testing, especially when we were constantly removing the thrusters to use them as a tail rotor. See section 10 for more detail on these problems.
8.0 Component Placement on Deck
The exact placement of each component was simply based on the best area that suited each component. Because the exact weights were not known we simply placed them so that there was symmetry along the decks longitudinal centerline. This actually worked well as the craft was well balanced along this line.
See Drawing CP1 and Figure 8 for Placement of the major components
9.0 Summary of who built each component
Components Built and Assembled by Group 7
1.
The Deck
2.
Motor Pedestal
3.
Thruster Mounts
4.
Thruster assemblies
5.
Skirt and skirt mountings
Components Built by Technicians
1 Motor crank shaft extension
10.0 Construction Problems
10.1 Lift Fan
Problem #1: The biggest issue we faced throughout the entire construction process was obtaining the appropriate lift fan. Early on in the semester we had discovered the 14 inch
15
Aerofan and had decided to purchase it. When we attempted to place the order we were told that we could not be accommodated because the fan was not designed for our application. For the next month or so we searched for a replacement with no luck
Solution: To obtain the only fan that would give us our required performance we went back to Aeroflo and lied about the real application of the fan and successfully purchased the 14 in Aerofan
Problem #2: The second problem we faced was the fact that the original Aerofan we purchased was designed to spin clockwise. After we had ordered it we discovered that the motor that we would be using had a crank shaft that was designed to spin in the counterclockwise direction.
Solution: To solve this problem we decided to send back the original fan and purchase a counterclockwise spinning 14 inch Aerofan.
10.2 Lift Engine
Problem: The original engine that we had decided on using was rated at approximately
8000 RPM and our fan was designed to perform at 3500 RPM. Originally we were going to gear the motor down but because it took so long to obtain our fan, we had come to the conclusion that we would not have enough time to properly combine this motor and the fan
Solution: We found a 4-stroke Briggs and Stratton lawnmower engine that makes its power at 3500 RPM, and even though it was heavier than we liked it still would keep our craft under our designed weight.
11.0 Testing
11.1 Initial Problems
11.1.1 Skirt
Problem: The first obvious issue with our hovercraft was that the skirt was not keeping the air underneath the hovercraft as we had hoped. The air was easily forcing the longitudinal portions of the skirt outwards so that it could escape underneath causing an unstable air cushion
Solution: To force the sides of the skirt to tuck underneath the hovercraft we simply joined the two sides of the skirt together with 2 lines of Kevlar thread that easily took the load caused by the pressure induced from the air cushion. This successfully kept the air underneath the craft and created a stable air cushion.
16
Figure 9 – Reinforced Skirt
11.1.2 Craft Weight Balance
Problem: once we began more testing on the crafts hovering capabilities we discovered that is was not perfectly balanced and this caused the craft to tilt left and right causing to be uncontrollable
Solution: To properly balance the craft we attached a hook to the center of the lift motor and hung the craft from the ceiling with a rope and added weight where necessary until the hovercraft was hanging perfectly level.
Figure 10 – Balancing Technique
11.1.3 Control
Problem: The biggest issue we faced was the fact that because the craft hovered so well and the fact that the engine that we used was so much larger that originally anticipated, our hovercraft has a tendency to spin counterclockwise which caused us great difficulty in controlling it.
17
Proposed Solutions
1. Drilling a hole in both corners of the hovercraft to allow air to escape and generate a counteracting moment to the torque generated from the engine.
Result: Not enough thrust was generated and larger holes would have decreased our hovering capability
2.
Adding converging nozzles to the preexisting holes to increase the velocity of the air, effectively increasing the thrust generated.
Result: The converging cross-sectional area of the nozzles actually caused less mass flow through the holes because the air “disliked” the constricting area.
3. Installing a tail rotor similar to that of a helicopter, to create a counteracting moment to the torque generated from the engine.
Result: The thrust induced by the fan was just enough to counteract the torque induced by the engine but due to the fact that the tail rotor was also production a lateral force, the hovercraft had a tendency to drift.
Figure 11 – Tail Rotor
Chosen Solution
The solution that we decided would produce the best result was to use 2 tail rotors, one at the bow and one at the stern of our craft. With these rotors the spinning tendency would be nullified and the lateral force induced by the rotors would cancel each other out.
Due to lack of time and money this solution could not be implemented.
18
11.2 Test Results
11.2.1 Load Capacity
To determine the maximum load capacity of our hovercraft we used free weights used in weight lifting to mount to our craft. By incrementally increasing the weight we could determine at what total weight our hovercraft would maintain its hovering capability.
Maximum Payload: At 55 lbs our hovercraft can barely hover
Recommended Maximum Payload: At 45 lbs our hovercraft maintains a proper air cushion and uniform hover.
Figure 12 – Loaded Craft
11.2.2 Terrain Applications
To determine what types of terrain our hovercraft has the capability of traversing we simply tested its hovering capability on 3 different terrains: Concrete, grass, snow and water. Below is a tabular summary of this phase of testing
Terrain
Did it Hover ?
(Y/N) Hover Performance Ranking
Concrete
Grass
Snow
Water
Y
Y
Y
Y
1
2
3
4
Table 9 – Terrain Results
19
Figure 13 – Water test Figure 14 – Grass Test
Hover Performance Ranking: This ranking was based mainly on the stability of the craft on each terrain. Concrete was obviously the best simply due to its surface uniformity.
Grass was almost as good but the craft would occasionally lose stability and tip to either side. Snow had the same issue but was a little more frequent due to the fact that the snow could be displaced by the escaping air from the skirt. Finally water proved to be the worst. Our craft still managed to hover for short periods of time but due to the fact that water is very non uniform and the fact that our craft is quite top heavy, it would lose its stability very quickly.
11.2.3 Speed
To determine the speed at which our hovercraft travels, and whether or not our thrust fans would provide the intended thrust to reach this speed, we found a flat uniform strip of concrete and measured and marked a 12 ft strip to use as a test section. We then positioned 2 people to control the spinning tendency with ropes attached to the hovercraft and 1 person to operate the thrusters. Next we started the craft a few feet from the start line and accelerated it to top speed, once it crossed the first line we began timing it with a stop watch and recorded the total time it took to traverse the 12 ft. We did this 10 times and averaged the results; see the table below for more detail.
Trial #
5
6
7
8
9
1
2
3
4
10
Time (s)
3.68
4.29
3.28
4.85
4.30
4.70
4.30
4.33
4.14
4.59
Average Speed
Time Trials For 12 ft
Approximate Speed (Kph)
3.91
3.36
4.39
2.97
3.35
3.06
3.35
3.33
3.48
3.14
3.43
Table 10 – Speed Results
20
Figure 15 – Speed Test Prep
11.2.4 Hover Height
To determine just how high our hovercraft was hovering off the ground we decided to measure the distance from the ground to the top of the deck when it was not in operation, and then to take a second measurement when it was hovering. Using these measurements and the approximate width of the skirt when the craft is hovering we could then estimate the distance between the bottom of the skirt and the ground. 10 such measurements were carried out and the results are tabulated below.
Hover Height Measurements
Trial #
4
5
6
7
1
2
3
8
9
10
Original Height (inch)
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
Height During Hover
3.75
3.74
3.77
3.75
3.74
3.80
3.73
3.73
3.75
3.75
Average Hover Height
Hover Height
0.50
0.49
0.52
0.50
0.49
0.55
0.48
0.48
0.50
0.50
0.501
Table 11 – Hover Height Results
11.3 Omitted Tests
Some tests that we would have liked to have done were omitted due to lack of time, money, and performance of our hovercraft. These tests are:
21
Maneuverability Test: We would have liked to have thoroughly tested the craft’s maneuvering capabilities but due to the spinning tendency and the inability to implement our rotor solution we could not perform this test
Further Speed Testing: We only managed to test the hovercrafts speed on concrete because on the majority of the other terrains, stability was an issue, especially on water, this coupled with the fact that the craft would only move slower it was deemed that the crafts speed was better tested on concrete.
Range Test: We did not test the range of our hovercraft because it is governed by the
R/C equipment that you use and we decided that it was not necessary as other tests were higher priorities with the limited time we had.
11.4 Comparison of Required Deliverables
To fully understand how we did in bringing our project in to realization we needed to compare what we wanted in September to what we actually achieved in April. We performed this comparison in tabular form, see table below
Parameters Design Requirements (Sept.) Actual Performance (April)
Size
Hovercraft Max Weight
Payload Max Weight
Speed
Range
2ft x 3ft
65 lbs
20 lbs
10 Kph
100 m
Hover height 1/2 inch
Note: Blue indicates performance improvement
Red indicates performance not achieved
2ft x 3ft
52 lbs
45 lbs
3.43 Kph
N/A
0.501 inch
Table 12 – Requirements Comparison
11.5 Discussion of Results
Our hovercraft, for the most part, met all design requirements and in some exceeded them. In particular our hovercraft performed extremely well in the payload department.
This is mainly due to the fact that our hovercraft was under the original maximum weight and because we were using a much larger horsepower engine than originally planned to drive the lift fan. On the other hand some areas of our hovercraft’s performance were less than desirable, in particular its speed, stability on certain terrains, and its tendency to spin. These problems stemmed from different causes.
Speed: The lack of speed was mainly due to the fact that the thrusters simply did not have enough power and thrust to move the craft at the desired speed.
Stability: The lack of stability on some surfaces was due to the fact that the hovercraft was very top heavy, in fact the motor accounted for more than 35% of the total weight.
When the craft moved over a non uniform surface, the air cushion would become
22
unstable, causing the craft to tip. When this occurred the engines mass would exacerbate the problem.
Spinning Tendency:
The tendency to spin present during the hovercraft’s operation was due to the torque generated from the lift engine. This coupled with the fact that the craft hovers on a cushion of air and that there was no resistance present to the crafts rotation, caused this tendency to spin out of control.
11.6 Was the Problem Solved With our Design?
The problem we tackled at the very beginning of the term, i.e. the autonomous transportation of a 20 lb object from a point on land to a point on water, was not fully resolved with our hovercraft design. As discussed in previous sections, the problems we faced did not allow us to fully reveal our hovercraft’s potential. The spinning tendency did not allow for autonomous control and the stability issue on water did not allow for smooth transit on water.
12.0 Possible Design Improvements (Recommendations)
To address the current problems, some design improvements can be implemented if the craft was rebuilt. They are as follows:
1. Higher-End Thrusters: To improve the speed of the craft we recommend that more powerful thrusters be used that have the ability to generate upwards of 5 lbs of thrust, we would even recommend using a larger number of thrusters not only to increase thrust but to increase the maneuverability of the hovercraft.
2. Larger Deck Base: To improve the stability of the craft we would recommend a larger deck base. This would increase the stability of the craft by decreasing the tipping moment created by the lift motor.
3. Lower Center of Gravity: Another improvement that could increase the crafts stability is a lower center of gravity. By increasing the weight of the deck or by placing the more massive components at a lower location on the hovercraft the center of gravity would be lowered effectively lower its center of gravity.
4. Duel Lift Fan and Motor: To eliminate the crafts tendency to spin, we recommend implementing a duel lift fan motor combination. By doing this and ensuring that they both spin in opposite directions, the 2 generated torques would be eliminated. This improvement however is recommended assuming the money is present for duel motors and fans.
5. Duel Tail Rotors: Another solution that we would have implemented with more time and money would have been a duel tail rotor system. The idea behind this solution is that if a tail rotor was located off the bow and stern a counteracting moment can be generated to eliminate the torque generated by the lift engine. Another advantage of this system
23
would be the enhanced maneuverability if the speed of the rotors could be controlled.
This would allow direct control over 360º maneuvers.
13.0 Conclusions
13.1 Design Process
After completing the full year design project it can be said that we have learned an enormous amount with regards to the design process. We have seen what can happen when things are underestimated, i.e. the torque generated by the engine. We have also seen just how many things can go wrong when you are attempting to put your design together. On the other hand we have also seen how things can go right, for example the hovering capability of our craft was exactly as we had envisioned; the combination of lift fan, engine and skirt provided our craft with the innate ability to create a stable air cushion and hover over most surfaces and obstacles. We feel that we have gained a great deal of knowledge in regards to the process of designing and constructing a product, and we feel that if we were to do it again the results would only be better.
13.2 Project Results
The results and performance we obtained from our hovercraft were positive for the most part. The majority of our hovercraft worked and if it were not for a few errors made in the design process we believe it would have worked very well. The underestimation of the torque generated by the lift engine in particular was our biggest error. Had we planned for this spinning tendency and the stability issue on water we could have avoided these problems and ultimately had a fully autonomous ROV hovercraft that could have fully solved the original problem we set our to solve in September.
13.3 Budget
The total cost of our project was $1741.90 which is somewhat over what we had estimated in January of approximately $1000. This underestimate was mainly due to the fact that we made a costly error by initially ordering the wrong fan and having to send it back to get the new, more expensive fan For more detail on how much each separate component cost us compared to what we thought in January see our budget sheet in
Appendix D.
24
14.0 References
1.0
http://www.ic.sunysb.edu/Stu/tmelnico/ , accessed December 4, 2004
25
Appendices
26
Appendix A – Drawings
27
Appendix B – Calculations
28
Appendix C – Gant Chart
29
Appendix D – Budget
30
31