Bifurcation and Chaos in Non
advertisement

Bifurcation and Chaos
in Non-smooth
Mechanical Systems
Remco Leine
March 2006
CEA-EDF-INRIA SCHOOL
"NONSMOOTH DYNAMICAL SYSTEMS.
ANALYSIS, CONTROL, SIMULATION AND APPLICATIONS"
INRIA Rocquencourt 29 May to 2 June 2006
Dr. ir. R.I. Leine
Center of Mechanics - IMES
CH-8092 ETH Zürich
SWITZERLAND
remco.leine@imes.mavt.ethz.ch
1 Introduction
Contents
1. Introduction
2
2. Non-smooth Dynamical Systems
3
3. Steady-state Behaviour
7
4. Definitions of Bifurcation
15
5. Bifurcations of Equilibria
18
6. Bifurcations of Fixed Points
29
7. Bifurcations of Periodic Solutions
44
8. Literature
61
Aim
To give a brief introduction to
Nonlinear Dynamics & Bifurcations of
· smooth systems
· non-smooth systems
2
2 Non-smooth Dynamical Systems
A dynamical system is a system whose state
evolves with time. The evolution is governed by
a set of rules (usually differential equations).
A dynamical system can be non-smooth...
2.1 Continuous-time Dynamical Systems
smooth system
rhs is differentiable up to any order
non-smooth continuous system
rhs is continuous but non-smooth
Example:
3
Filippov system
not everywhere
rhs is discontinuous on hypersurfaces
replace with differential inclusion
almost everywhere
attractive sliding mode
4
Example:
x
x
measure differential inclusion
or
with
A measure differential inclusion is able to describe
discontinuities in the state.
5
2.2 Discrete-time Dynamical Systems
A discrete-time dynamical system is described by a
mapping
The iteration parameter i defines a "discrete time".
The mapping can be iterated:
Example: Predator-Prey Model
number of rabbits on Malta in year i
number of foxes on Malta in year i
reproduction
predation
starvation
6
3 Steady-state Behaviour
A dynamical system expressed by
or
or
with initial condition
defines a solution curve
or trajectory in the state-space which we denote by
or simply by
.
A solution of an initial value problem of a non-smooth system
is not always unique and might even not exist!
Some special solutions
equilibria, (quasi)-periodic solutions and chaotic solutions
are called steady-states of the system.
A limit point/set is a point or set of points in the state-space
which can be approached in forward or backward time.
attracting, repelling or saddle-type of steady-states are
limit points/sets.
3.1 Equilibria
An equilibrium
is a point for which there exists a
solution curve
for all
i.e. an equilibrium is a constant solution of the system
and it holds that
or
or
7
Types of equilibria of a linear planar system
or
Node
real
x2
v2 x2
v1
v1
x1
x1
stable
unstable
,
Focus
,
x2
x2
x1
x1
stable
v2
unstable
8
Center
x2
not a limit point!
x1
Saddle
real,
v1
(or
)
x2
v2
x1
9
3.2 Periodic Solutions
Non-autonomous systems
A trajectory for which holds
is called a periodic solution.
is a point on the
periodic solution. is the period time and is the minimal period
for which the periodicity property holds.
Differentiation:
System is also periodic!
Generally
with
A periodic solution with
is a called a period-k solution.
period-2 solution
10
Autonomous systems
A trajectory for which holds
is called a periodic solution.
is a point on the
periodic solution. is the period time and is the minimal period
for which the periodicity property holds.
A periodic solution of an autonomous system can be
k -periodic with respect to a Poincaré map (as we will see..).
An isolated periodic solution of a system (autonomous or
non-autonomous), which is a limit set, is called a limit cycle.
Example:
Center
x2
x
x1
infinitely many
periodic solutions
x
unstable focus
limit cycle (attracting)
11
3.3 Quasi-Periodic Solutions
Two frequencies !1 and !2 are incommensurate if
!1=!2 is an irrational number.
A quasi-periodic solution is characterised by two or
more incommensurate frequencies.
Example:
no resonance
is quasi-periodic
is periodic with
quasi-periodic
dense solution on a torus
sec
periodic
12
not
ver
yc
o
def nstru
ctiv
init
e
ion
3.4 Chaos
smooth dynamical systems:
Chaos in a deterministic dynamical system is bounded
steady-state behaviour that is not a equilibrium, periodic solution
or quasi-periodic solution.
A chaotic limit set is, when it is attracting, called a
chaotic attractor or strange attractor.
Example: Duffing system
1.5
0.8
1
0.4
. 0
0
x
x
0.5
-0.5
-0.4
-1
-0.8
-1.5
0
20
40
60
80
100 120 140 160 180
t
-1.5
-1
-0.5
0
x
0.5
1
1.5
aperiodic oscillation with sensitive dependence on
initial conditions; fractal structure
Lyapunov exponents:
Floquet multiplier
non-smooth dynamical systems: ??
13
3.5 Fixed Points
A fixed point
of a system
is a point which is mapped to itself
A point
which satisfies
is called a period k-point and is a fixed point of
.
Quasi-periodic and chaotic solutions are also possible
in a discrete-time system.
yi+1
1
fixed points
0
-1
-1
0
1
yi
14
4 Definitions of Bifurcation
Geometric Definition of Bifurcation
A bifurcation of a dynamical system
Poin
car
é (1
905
)
is a change in the number of steady-states under
influence of parameter ¹.
A diagram depicting some scalar measure
of
versus ¹, where
is on a steady state, is called
a bifurcation diagram.
Examples
bifurcation
point
change: 3-1-1
)bifurcation
kxk
bifurcation
point
change: 2-1-2
)bifurcation
15
Homeomorph = identical after stretching and scaling
x2
homeomorph
phase portraits
x2
x1
x1
A homeomorphism is a continuous invertible map.
mat
Topological Definition of Bifurcation
hem
atic
The appearance of topologically nonequivalent
ians
phase portraits under variation of a parameter ¹
is called a bifurcation.
The geometric definition and the topological definition
agree for smooth dynamical systems.
16
phase portrait of a non-smooth dynamical system
x
x
not homeomorph
phase portraits!!!
topological definition = geometric definition
for non-smooth dynamical systems
In the following, we use the geometric definition of bifurcation.
17
5 Bifurcations of Equilibria
An equilibrium branch is described by
Along an equilibrium branch it holds that
slope of the branch:
with
If
regular
, then s is undefined
kxk
kxk
not unique
full rank
not full rank
18
5.1 Saddle-Node Bifurcation (Turning Point Bif.)
normal form:
equilibria:
for
eigenvalue goes
through zero
Jacobian:
eigenvalues:
slope at the bifurcation point:
19
non-smooth continuous system:
equilibria:
for
-1
1
eigenvalue jumps
through zero
discontinuous saddle-node bifurcation
Jacobian:
generalised differential!
set-valued sign-function
eigenvalue jumps though 0!
or, eigenvalue is set-valued at bif.point with 0 in its set.
20
5.2 Transcritical Bifurcation
smooth:
asymmetric
buckling
non-smooth:
discontinuous transcritical
bifurcation
21
5.3 Pitchfork Bifurcation
smooth:
symmetric
buckling
non-smooth:
discontinuous pitchfork
bifurcation
22
5.4 Hopf Bifurcation
normal form:
Jacobian at equilibrium:
eigenvalues:
creation of periodic solutions
eigenvalues go as a complex conjugated pair
through the imaginary axis
Transformation:
normal form pitchfork bifurcation
23
Non-smooth continuous counter part:
somewhat strange
jump
jump
discontinuous Hopf bifurcation
after transformation in polar coordinates:
discontinuous pitchfork bif.
24
An easier example of a discontinuous Hopf bifurcation
equilibrium:
generalised Jacobian:
convex combination
25
5.5 Multiple Crossing Bifurcations
Single crossing bifurcation:
one (pair) of eigenvalue(s) of the set-valued
generalised Jacobian crosses the imaginary axis once
jump
-1
1
eigenvalue jumps
through zero
jump
Much like classical bifurcations in smooth dynamical systems
Multiple crossing bifurcation:
one (pair) of eigenvalue(s) of the set-valued
generalised Jacobian crosses the imaginary axis more than once
jump
jump
jump
Much more complicated than single crossing bifurcations
26
Combined Hopf and turning point behaviour
generalised Jacobian:
two crossings of
the imaginary axis
non-smooth system
periodic
sol.
multiple
crossing
bifurcation
smooth approximating system
periodic
sol.
Hopf
bifurcation
pitchfork
bif.
27
28
6 Bifurcations of Fixed Points
Nonlinear map:
Fixed point:
6.1 Linearisation around a Fixed Point
Perturbation:
Substitution and linearisation:
Study the linear map:
29
6.2 One-dimensional Linear Maps
stable
unstable
a = 1/2
yi+1
1
1
0
0
-1
-1
-1
yi+1
0
1
yi
a = {1/2
-1
1
0
0
-1
-1
0
1
yi
0
1
yi
1
yi
a = {2
yi+1
1
-1
a=2
yi+1
-1
0
30
6.3 Turning Point Bifurcation
fixed points:
1
eigenvalue goes
through unit circle
1
0
-1
-1
0
1
31
non-smooth continuous map:
fixed points:
eigenvalue jumps
discontinuous turning-point bif.
through unit circle
similarly:
1
discontinuous pitchfork
0
&
discontinuous transcritical
-1
bifurcation
-1
0
1
32
6.4 Flip Bifurcation
unique fixed point for
eigenvalue:
eigenvalue goes
1
through -1
stability is exchanged...
is there a bifurcation?
33
1/2
flip!
0
-1/2
-1/2
0
1/2
A flip bifurcation of the
period-1 map is a
pitchfork bifurcation of the
period-2 map
34
continuous flip bifurcation
discontinuous flip bifurcation
eigenvalue jumps
1
through -1
35
6.5 Naimark-Sacker Bifurcation (2nd Hopf bifurcation)
complex pair of eigenvalues
crosses the unit cricle
If and
are commensurate,
then a period-k solution is created/destroyed.
If and
are incommensurate,
then a quasi-periodic solution is created/destroyed.
36
6.5 The Logistic Map
A simple nonlinear map can have very complicated dynamics
Fixed points:
and
for
non-invertible
map!
stability:
stable for
goes through
at
flip bifurcation
37
Logistic map, r = 3.4
2nd iterated Logistic map, r = 3.4
38
Logistic map, r = 3.5
2nd iterated Logistic map, r = 3.5
39
Logistic map, r = 3.8
3rd iterated Logistic map, r = 3.8
40
y
r
Logistic map, brute force diagram
y
r
Logistic map, brute-force diagram zoom
41
Logistic map, r = 3.835
3rd iterated Logistic map, r = 3.835
42
6.6 The Tent Map
eigenvalue jumps
through +1 and -1
1
multiple crossing bifurcation
creation of infinitely many
unstable branches
)instant chaos
y
brute-force
bifurcation
diagram
r
43
7 Bifurcations of Periodic Solutions
7.1 Stability of Periodic Solutions
Fundamental solution matrix
small perturbations:
describes the influence of
Smooth systems:
is a local linearsation around the periodic solution!
Monodromy matrix:
Floquet multipliers:
describe the exponential convergence/divergence of
the perturbed solution w.r.t. the periodic solution
44
Autonomous systems: phase of the periodic solution is not fixed
if
then
is an eigenvector of
stable
with eigenvalue
unstable
If all Floquet multipliers, which are not associated with the
freedom of phase, are within the unit circle, then the
periodic solution is stable and attractive.
45
7.2 The Poincaré Map
Poincaré map
periodic solution
period-2 solution
The Poincaré map transforms a
continuous-time system into a discrete-time system.
The
eigenvalues of
are identical to the
Floquet multipliers
46
Example: Stick-slip Oscillator
1.5
1
0.5
0
-0.5
-1
-1.5
0
0.5
1
1.5
2
2.5
3
2
2.5
3
3
non-smooth
continuous map!
2.5
2
1.5
47
turning-point
bifurcation
discontinuous turning-point bifurcation in the Poincaré map
m
discontinuous fold bifurcation of the periodic solution
If the eigenvalues of the Poincaré map jump,
then also the Floquet multipliers jump!
48
7.3 Overview of Bifurcations
Bifurcation in the
Poincaré map
Bifurcation in the
continuous-time system
turning-point
bifurcation
saddle-node bifurcation (eq.)
or
fold bifurcation (per.sol.)
transcritical
bifurcation
transcritical
bifurcation (eq.)
pitchfork bifurcation
in the period-1 map
pitchfork
bifurcation (eq.)
or
Hopf bifurcation
(eq.+per.sol.)
flip bifurcation
in the period-1 map
=
pitchfork bifurcation
in the period-2 map
Naimark-Sacker
bifurcation
period-doubling
bifurcation (per.sol.)
Naimark-Sacker
bifurcation
(per.sol.+quasi-per.sol.)
can all be discontinuous!
49
7.4 Saltation Matrix for Filippov Systems
Filippov system:
almost everywhere
variational equation:
Jacobian:
does not exist everywhere!
The fundamental solution matrix jumps
with the saltation matrix
50
if
and
are infinitely close to each other:
no jump in
jump in
51
7.4 Trilinear Spring System
supports are massless
Vector field jumps if contact is made
)
Filippov system
52
saltation matrices on each side of the
corner points are not each others inverse:
53
fold bifurcation
discontinuous fold
bifurcation
jump
54
7.5 Stick-slip System with External Excitation
non-autonomous
Filippov system
55
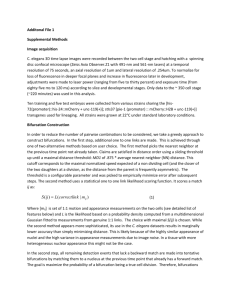
7.6 The Woodpecker Toy
Pfeiffer (1984)
Glocker (1995,2005)
Leine (2003)
Glocker (1995)
1
sleeve displacement
3 56
4
sleeve rotation
1
body rotation
8
7
2
8
4
56
sleeve rotation
4 5
3
1,2,7,8
3,5,6
4
7
body rotation
1
2
7
7
8
3
3
4
5
6 4
5
57
The dynamics is described by a one-dimensional map
jumps in the map!
"N1 = 0.5
58
Map of period-1 solutions
stable solution
unstable solution
marginally stable solution
discontinuous map crossing
59
Map of period-1 and -2 solutions
stable solution
unstable solution
marginally stable solution
discontinuous map crossing
60
8 Literature
Non-smooth Systems
Brogliato, B. Nonsmooth Mechanics, 2ed.,
Springer, London, 1999.
Glocker, Ch. Set-valued Force Laws, Dynamics
of Non-smooth Systems, Lecture Notes in
Applied Mechanics Vol.1, Springer, Berlin,
2001.
Monteiro Marques, M.D.P. Differential
Inclusions in Nonsmooth Mechanical Problems.
Shocks and Dry Friction, Birkhäuser, Basel,
1993.
Nonlinear Dynamics
Leine, R.I. & Nijmeijer, H. Dynamics and
Bifurcations of Non-Smooth Mechanical
Systems, Lecture Notes in Applied and
Computational Mechanics Vol.18, Springer,
Berlin, 2004.
Strogatz, S. Nonlinear Dynamics and Chaos,
Studies in Nonlinearity, Addison-Wesley,
Reading, 1994.
61