trade-offs between preprocessing time and query time
advertisement

Project number:
Project acronym:
Title:
IST-2001-39250
MOVIE
Motion Planning in Virtual Environments
Deliverable No D 2.2: Trade-offs between preprocessing time and query time
Short description:
The paths generated by a PRM usually contain self-loops and long detours,
unnecessary motions and sharp turns. It is therefore necessary to find methods for
generating more natural-looking motion paths.
We describe various techniques for generating natural-looking motion paths for
moving entities amidst a set of obstacles. We separate postprocessing techniques –
which typically take a path generated from a PRM and make it shorter and smoother –
and preprocessing techniques, which use data structures that can output more natural
motion paths when given motion-planning queries.
We also survey the progress made for infrastructure for robust collision-detection in
3D, and describe how we can preprocess the scene for quickly answering interference
queries.
Due month:
Delivery month:
Partners owning:
Partners contributed:
Classification:
24
24
TEL AVIV
UU/CNRS-LAAS/TELAVIV/KINEO
Public
Project funded by the European Community under the
“Information Society Technologies” Programme (1998-2002).
Tradeoffs between Preprocessing Time
and Query Time
Producing Natural-Looking Motion Paths
A central goal of the MOVIE project is to plan motion paths of entities in virtual
environments that will be not just collision-free (i.e. the entities should not penetrate
any static or moving obstacles and should not collide with one another) but also
natural-looking. By “natural-looking” we mean that each entity should select a path
that will be as close as possible to the path a human would take in the same scene to
reach the goal configuration from its start configuration. This essentially means the
following:
a) The path should be short – that is, it should not contain long detours when
significantly shorter routes are possible;
b) it should have a guaranteed amount of clearance – that is, the distance of any
point on the path from the closest obstacle should not be lower than some
prescribed value;
c) it should be smooth, not containing any sharp turns.
We note that requirements (b) and (c) may conflict with the first requirement (a) in
case it is possible to considerably shorten the motion path by taking a shortcut through
a narrow passage. In such cases we may prefer a path with less clearance (and perhaps
containing sharp turns).
Many motion planning techniques, with the Probabilistic Roadmap (PRM) method
being a good example, generate low-quality motion paths. A PRM is a graph that is
usually constructed by incrementally adding new configurations as graph vertices,
trying to connect each new configuration with its nearest neighbors. However, in
order to keep the PRM compact, we usually do not try to connect to configurations if
they already belong to the same connected component, so no cycles are created and
the resulting PRM is a forest (or a tree) of free configurations connected by straight
line segments (in the configuration space). As a result, the paths that PRMs output
usually contain unnecessarily long detours and even loops. Moreover, as these paths
are sequences of straight line segments, they have first order discontinuities, namely
they contain sharp turns.
Most known techniques use smoothing as a postprocessing step to improve the path
obtained from the PRM. While smoothing is generally good at removing artifacts
(mainly loops) from the path, it is not good at finding alternative routes that differ
considerably from the original one.
PRMs with Cycles
Nieuwenhuisen and Overmars [1] suggest an alternative approach for constructing the
PRM: Let u and v be two configurations that belong to the same connected
component, such that the length of the path from u to v is dPRM(u,v). We will add an
edge connecting u and v, whose length is d(u,v) only if dPRM(u,v) > K·d(u,v), where K
≥ 1 is a parameter. This way it is possible to created cycles in the PRM, but only if
these cycles are “useful”, namely when they allow taking a significant shortcut
instead of a long detour. The parameter K controls the amount of cycles in the graph:
If K = 1 then all cycles are allowed, while for K = ∞ no cycles are allowed and the
resulting PRM is a forest.
Once we have a PRM with cycles, we can query it with a start and a goal
configuration by simply connecting these configurations to the graph and running
Dijkstra's algorithm from the start configuration.
This algorithm, if implemented in a naïve manner, may considerably increase the time
needed to construct the PRM (the preprocessing time). This is because for computing
dPRM(u,v) we should repeatedly execute Dijkstra's algorithm for every pair of vertices
we try to connect. However, Nieuwenhuisen and Overmars devise a simple
augmentation for Dijkstra's algorithm that helps keeping the construction time
reasonable. Recall that during the execution of Dijkstra's algorithm the vertices are
stored in a priority queue, sorted by their increasing distance from u. So we can
simply do the following:
• Once v is popped out of the queue, we can terminate the process, since we have
dPRM(u,v) and need not proceed to other vertices.
• Once we pop a vertex w such that dPRM(u, w) > K·d(u,v), we can terminate the
process, since it is obvious that dPRM(u,v) > dPRM(u, w) and we do not connect u
and v.
The new connection technique for PRMs decreases the average path length and the
variance of the path lengths without increasing the preprocessing time considerably.
Another important advantage is that its allows extracting alternative routes from the
roadmap, which is important for some applications, for example it allows for variation
in the routes computer entities in a game take, or helps avoiding deadlock situations
when multiple entities move in the same environment.
Improved Smoothing Techniques
Unfortunately, although a PRM with cycles produce shorter paths, there is no
guarantee that these paths are indeed the shortest ones available. These paths also
contain sharp turns, as they are still sequences of straight line segments. Geraerts and
Overmars [2] focused on postprocessing motion paths extracted from PRMs with
cycles. They suggest a two-phase approach, where the first phase focuses on local
path enhancements and is comprised of two steps:
• Removal of redundant nodes. A node along the path (representing a free
configuration) is considered redundant if its predecessor and its successor nodes
can be connected using a straight line segment. Once a node is removed, new
adjacencies are created along the path, so the removal process is performed
iteratively.
• Increasing clearance. The path is retracted to the medial axis of the obstacles. The
resulting path may contain degenerate loops (known as branches or antennas), but
they are easy to detect and remove.
The second phase, called partial shortcut, aims to globally improve the path by
removing redundant motions, and is suited for problems with a large number of
degrees of freedom (DOFs). The main idea is to select a subset of the DOFs and to try
to replace portions of the path by linearly interpolating on the set of selected DOFs
(for example, we may wish to prevent unnecessary rotations when the entity translates
along the path – see Figure 1 for an illustration).
Figure 1 – Performing partial shortcut on the path to the left yields the path on the
right, without the redundant rotations.
Experiments show that the path length can be decreased considerably by removing
redundant nodes and by enhancing the path clearance. The partial shortcut technique
is able to remove redundant motions. The main disadvantage in this scheme is that it
may add a few seconds to the query time (especially if partial shortcuts are applied),
as it has to be performed as a postprocessing stage.
The LAAS/Kineo group uses the Dubins steering method as a postprocessing step for
producing natural-looking trajectories for moving entities. The initial motion path,
generated using a PRM with cycles, is first optimized by eliminating any loops it may
contain, they the Dubins method is applied to produce a smooth trajectory. The
steering method is robust, having a low computational cost, and produces smooth
trajectories formed by straight segments and circular arcs.
Humanoids using the Dubins steering method can only walk on a fixed plane. In order
to let them walk in a multi-level building with floors and stairs between them, an
enhanced steering method , which allows planning on uneven terrains, is used.
Improved Roadmap Generation
Another drawback in having a postprocessing stage is that it may significantly modify
the original path. Suppose we associate a weight with each of the PRM edges,
according to some optimization criterion we wish to pursue. Using this weighting
function Dijkstra's algorithm can compute the best path available in the PRM with
respect to our optimization criterion, but after this path is postprocessed we can
guarantee nothing about its optimality any more.
A good example is the application of motion-planning for coherent groups of entities
in a two-dimensional environment cluttered with obstacles. Kamphuis and Overmars
[3] solve this problem by planning a collision-free path π from the start location to the
goal for a single entity (a small disc). The entities are constrained to a group shape,
which has a constant area A during traversal of the path. The group shape is
constructed symmetrically about the path π and has a “pear”-like shape, created by
sweeping a disc (with a diameter equal to the preferred group width w) along the path
from the current position of the group. The disc becomes smaller only when it collides
with obstacles. That is, its radius becomes equal to the amount of clearance along the
path. This sweep extends along the path to the point where the total swept area by the
disk becomes equal to the desired group area A. The motions of the individual entities
inside the “pear”-like shape are governed by a potential field. A natural weighting
criterion for this application is the time it takes the group to traverse an edge. While
being proportional to the edge length, the clearance of the edge must also be taken
into account, as the group needs more time to pass through a narrow passage.
However, if we use a PRM with cycles and obtain a path from it, we will have to
smooth it in order to achieve natural group behavior along the path.
Nieuwenhuisen et al. [4] describe a method for constructing an enhanced PRM with
cycles, guaranteeing that the paths generated from this PRM are smooth (C1continuous) and always keep some minimum amount of clearance from the obstacles
in the scene. The preprocessing stage of constructing the PRM is performed as
follows:
1. When a free configuration is randomly selected, we retract it to the Voronoi
diagram (the medial axis) of the obstacles. This is done by identifying the pair of
closest obstacles to the configuration and moving it so it will be equidistant from
these obstacles.
2. When two configurations are connected by a straight line segment, this segment
may get very close to the obstacles. The edges are therefore retracted to the
Voronoi diagram as well. This is done by adding intermediate nodes
(configurations) along them and retracting them to the Voronoi diagram.
3. In order to remove first order discontinuities, circular blends are added to the
roadmap (see Figure 2). The radius of the circular blend is selected such that its
clearance does not fall below some predefined threshold.
Figure 2 – Adding circular blends to a node of degree 2 (left) and to a node of
degree 4 (right).
Whenever an entity has to move to a new location, it can search the graph in real-time
to plan its route through the environment. To obtain a path we first need to connect
the current position of the entity to the graph. This can easily be done by finding the
closest vertex in the graph and connecting the current placement to this vertex using
circular blends. We proceed in the same way for the goal placement of the entity.
Now we can use a shortest path algorithm in the graph to find the path between the
current and goal positions. Because of the properties of the roadmap, paths will be
short, have enough clearance from the obstacles, and are smooth. No postprocessing
is required in this case and no overhead is incurred during the query stage.
The VV(c)-diagram and the VV-Complex
A different data structure, called the VV(c)-diagram, for planning natural motion paths
in the plane amidst polygonal obstacles is introduced by Wein et al. [5]. Given a
preferred clearance value c, we dilate the polygonal obstacles by a radius c and
compute the visibility graph of the dilated obstacles. This visibility graph contains all
shortest paths with a clearance of at least c from the obstacles. Moreover, as each
convex polygon vertex becomes a circular arc of radius c, the valid visibility edges
are bitangents to two circular arcs (note that the dilated polygon edges are also valid
visibility edges). This guarantees that a shortest path extracted from such a visibility
graph is C1-smooth, and contains no sharp turns. However, even though the original
polygonal obstacles are disjoint, the dilated obstacles may no longer be disjoint,
meaning that narrow, yet collision-free, passages can be blocked when we dilate the
obstacles. It is clearly not possible to pass in such passages with a clearance of at least
c, but we still wish to allow a path with the maximal clearance possible in these
regions. To do this, we compute the portions of the free configuration space that are
contained in at least two dilated obstacles, and add their intersection with the Voronoi
diagram of the original polygons to our diagram. The resulting structure is called the
VV(c)-diagram. It should be noted that if a path contains a portion of the Voronoi
diagram it may not be smooth any more. This is however acceptable, as we consider
making sharp turns inside narrow passages to be natural.
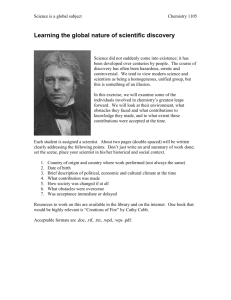
An interesting observation is that for c = 0, the VV(c)-diagram equals the visibility
graph, while for c = ∞ it equals the Voronoi diagram. Thus, the diagram interpolates
between the visibility graph and the Voronoi diagram.
Figure 3 – The VV(c)-diagram of four polygons inside a rectangular room. The dilated
obstacles boundaries are drawn in blue, the Voronoi chains that are contained in the
diagram are drawn in red and the visibility edges are drawn in dashed black lines.
Given a start and a goal configuration we just have to connect them to the VV(c)diagram by computing the visibility edges from these configurations to the circular
arcs and to the endpoints of the Voronoi chains in the diagram. We then compute the
shortest path between the start and goal using Dijkstra's algorithm, with the proper
weights associated with the diagram edges. The weighting function controls whether
we prefer taking shortcuts through narrow passages on selecting longer routes with
more clearance.
Like the retracted PRM with circular blends, the construction the VV(c)-diagram is
performed as a preprocessing stage, while the queries achieve run-time performance.
The main advantage of the VV(c)-diagram is its deterministic nature: If constructed in
an exact manner, it is guaranteed to contain the shortest possible paths. Moreover, due
to the probabilistic nature of PRM method it is not complete, namely a PRM may fail
to connect two configurations even if there exists a collision-free path between them.
The VV(c)-diagram does not suffer from this drawback.
In some cases, we may want to plan paths between two configurations using different
c-values and select the best one. Wein et al. [5] further explain how to preprocess a
scene of polygonal obstacles and to create a data structure called the VV-complex that
can be used to efficiently plan motion paths for any start and goal configuration and
any clearance value c, without having to explicitly construct the VV(c)-diagram for
that c-value. The preprocessing time of constructing the VV-complex is O(n2 log n),
where n is the total number of obstacle vertices, and the query takes O(n log n + k)
time, where k is the number of edges encountered during the search.
It is possible to construct both the VV(c)-diagram and the VV-complex in a robust
manner, using costly exact arithmetic. However, once we have the data structure, we
can query it using just floating-point arithmetic. This way we reduce the number of
costly geometric operations in the query stage and perform the time-consuming
computations only in the preprocessing stage.
Collision Detection in 3D
A basic operation for motion-planning in 3D is detecting collision between to objects,
the moving entity and one of the obstacles. Let P and Q be two closed polyhedra in
R3. The Minkowski sum of P and Q is the polyhedron:
P ⊕ Q = { p + q | p∈ P, q ∈ Q }.
In order to determine whether P and Q intersect we can simply check whether the
origin is contained in P ⊕ -Q (where -Q is the polyhedron Q rotated by 180°). It
should be noted that as the combinatorial structure of the Minkowski sum is invariant
to translations of P or Q, then precomputing P ⊕ Q is especially desirable when the
motion of the polygons is restricted to translations only,.
Fogel and Halperin [6] present an exact implementation of an efficient algorithm that
computes Minkowski sums of convex polyhedra in R3. Their implementation is
complete in the sense that it does not assume general position, namely, it can handle
degenerate input, and produces exact results.
The key idea is to use a dual representation for a convex polyhedron. A well-known
representation is the Gaussian map GP of a compact convex polyhedron P in R3 is a
set-valued function from P to the unit sphere S2, which assigns to each point p the set
of outward unit normals to support planes to P at p. Thus, an entire facet f of P is
mapped under GP to a single point, which is the outward unit normal to f. An edge e
of P is mapped to a geodesic segment GP (e) on S2 whose length is easily seen to be
the exterior dihedral angle at e. And a vertex v of P is mapped by GP to a spherical
polygon whose sides are the images under of edges incident to v. However, Fogel and
Halperin use a modified representation called the cubical Gaussian map (CGM). The
CGM CP of a polytope P in R3 is obtained by defining a similar mapping from P’s
features to the six faces of the parallel-axis cube circumscribing the unit sphere,
referred to as the unit cube, instead of mapping them to the unit sphere itself. The
decomposition of the unit cube faces into maximal connected regions, so that the
extremal point is the same for all directions within any region forms the CP.
It is possible to show that CP⊕Q is the overlay of CP and CQ, so using the CGM
representation of two convex polyhedra it is easy to construct the dual representation
of their Minkowski sum (see Figure 34 for an illustration). Once the structure of the
Minkowski sum is determined, it is possible to answer collision-detection queries very
efficiently, as it is only necessary to check whether the origin is contained in the sum.
Moreover, as this method is exact, it is possible to determine whether the two
polygons just touch but do not penetrate one another, which is impossible to do in an
approximate scheme.
Figure 4 – A dioctagonal pyramid (above) and the Minkowski sum of two orthogonal
dioctagonal pyramids (below). The figures on the left show the primal space, the middle ones
show the corresponding cubical Gaussian roadmaps, while the figures on the right show the
folding of the cubical map into 6 planar maps.
References
[1] D. Nieuwenhuisen, M.H. Overmars, Useful Cycles in Probabilistic Roadmap
Graphs. Technical report UU-CS-2004-064, 2004.
[2] R. Geraerts, M.H. Overmars, Clearance Based Path Optimization for Motion
Planning. In IEEE International Conference on Robotics and Automation
(ICRA'04) pp. 2386-2392, 2004.
[3] A. Kamphuis, M.H. Overmars, Motion Planning for Coherent Groups of Entities.
In IEEE International Conference on Robotics and Automation (ICRA'04)
pp. 3815-3822, 2004.
[4] D. Nieuwenhuisen, A. Kamphuis, M. Mooijekind, M.H. Overmars, Automatic
Construction of High Quality Roadmaps for Path Planning. Technical report UUCS-2004-068, 2004.
[5] R. Wein, J.P. van den Berg, D. Halperin, The Visibility-Voronoi Complex and Its
Applications. Manuscript, submitted to the 21st ACM Symposium on
Computational Geometry (SoCG’05).
www.cs.tau.ac.il/~wein/publications/pdfs/vv_complex_TR.pdf
[6] E. Fogel, D. Halperin, Exact an Efficient Construction of Minkowski Sums of
Convex Polyhedra with Applications. Manuscript, submitted to the 21st ACM
Symposium on Computational Geometry (SoCG’05).
www.cs.tau.ac.il/~efif/collision_detection




![[#GRP-871] MembershipFinder.findMemberships doesn`t appear to](http://s3.studylib.net/store/data/007422299_1-e8f5b300a55fd76701b09e629a1c1653-300x300.png)