A Multiresolution Stochastic Process Model for Basketball
advertisement

A Multiresolution Stochastic Process Model for
Basketball Possession Outcomes
Dan Cervone, Alex D’Amour, Luke Bornn, Kirk Goldsberry
Harvard Statistics Department
August 11, 2015
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
NBA optical tracking data
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
NBA optical tracking data
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
NBA optical tracking data
(x, y ) locations for all 10 players (5 on each team) at 25Hz.
(x, y , z) locations for the ball at 25Hz.
Event annotations (shots, passes, fouls, etc.).
1230 games from 2013-14 NBA, each 48 minutes, featuring 461 players in
total.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
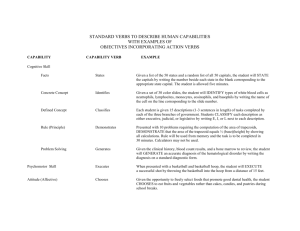
1.6
Expected Possession Value (EPV)
RASHARD
LEWIS
POSS.
LEBRON JAMES POSSESSION
James
shot
Splits the defense;
clear path to
basket
Slight dip in EPV after
crossing 3 point line
0
3
Pass
{
Runs behind
basket and
defenders close
Accelerates
into the
paint
Pass
{
1.0
1.2
Accelerates
towards basket
Slight dip in EPV after
crossing 3 point line
EPV constant while
pass is en route
0.8
EPV
1.4
NORRIS COLE POSSESSION
6
9
12
15
18
time
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
T (ω): possession length
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
T (ω): possession length
Zt (ω), 0 ≤ t ≤ T (ω): time series of optical tracking data.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
T (ω): possession length
Zt (ω), 0 ≤ t ≤ T (ω): time series of optical tracking data.
(Z )
Ft
= σ({Zs−1 : 0 ≤ s ≤ t}): natural filtration.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
T (ω): possession length
Zt (ω), 0 ≤ t ≤ T (ω): time series of optical tracking data.
(Z )
Ft
= σ({Zs−1 : 0 ≤ s ≤ t}): natural filtration.
Definition
The expected possession value (EPV) at time t ≥ 0 during a possession is
(Z )
νt = E[X |Ft ].
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
EPV definition
Let Ω be the space of all possible basketball possessions. For ω ∈ Ω
X (ω) ∈ {0, 2, 3}: point value of possession ω.
T (ω): possession length
Zt (ω), 0 ≤ t ≤ T (ω): time series of optical tracking data.
(Z )
Ft
= σ({Zs−1 : 0 ≤ s ≤ t}): natural filtration.
Definition
The expected possession value (EPV) at time t ≥ 0 during a possession is
(Z )
νt = E[X |Ft ].
EPV provides an instantaneous snapshot of the possession’s value, given its
full spatiotemporal history.
(Z )
νt is a Martingale: E[νt+h |Ft ] = νt for all h > 0.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Calculating EPV
(Z )
νt = E[X |Ft
]
Regression-type prediction methods:
– Data are not traditional input/output pairs.
– No guarantee of stochastic consistency.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Calculating EPV
(Z )
νt = E[X |Ft
]
Regression-type prediction methods:
– Data are not traditional input/output pairs.
– No guarantee of stochastic consistency.
Markov chains:
+ Stochastically consistent.
– Information is lost through discretization.
– Many rare transitions.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Calculating EPV
(Z )
νt = E[X |Ft
]
Regression-type prediction methods:
– Data are not traditional input/output pairs.
– No guarantee of stochastic consistency.
Markov chains:
+ Stochastically consistent.
– Information is lost through discretization.
– Many rare transitions.
Brute force, “God model” for basketball.
+ Allows Monte Carlo calculation of νt by simulating future possession paths.
– Zt is high dimensional and includes discrete events (passes, shots, turnovers).
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
A coarsened process
Finite collection of states C = Cposs ∪ Cend ∪ Ctrans .
Cposs : Ball possession states
{player} × {region} × {defender within 5 feet}
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
A coarsened process
Finite collection of states C = Cposs ∪ Cend ∪ Ctrans .
Cposs : Ball possession states
{player} × {region} × {defender within 5 feet}
Dan Cervone (Harvard)
Cend : End states
Multiresolution Basketball Modeling
{made 2, made 3, turnover}
August 11, 2015
A coarsened process
Finite collection of states C = Cposs ∪ Cend ∪ Ctrans .
Cposs : Ball possession states
{player} × {region} × {defender within 5 feet}
Cend : End states
{made 2, made 3, turnover}
Ctrans : Transition states
{{ pass linking c, c 0 ∈ Cposs },
{shot attempt from c ∈ Cposs },
turnover in progress,
rebound in progress }.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
A coarsened process
Finite collection of states C = Cposs ∪ Cend ∪ Ctrans .
Cposs : Ball possession states
{player} × {region} × {defender within 5 feet}
Cend : End states
{made 2, made 3, turnover}
Ctrans : Transition states
{{ pass linking c, c 0 ∈ Cposs },
{shot attempt from c ∈ Cposs },
turnover in progress,
rebound in progress }.
Ct ∈ C: state of the possession at time t.
C (0) , C (1) , . . . , C (K ) : discrete sequence of distinct states.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Ctrans
Cend
Turnover
Made 2pt
Shot
Made 3pt
Player 4
Pass to P5
Player 3
Pass to P4
Cposs
Player 2
Pass to P3
Player 1
Pass to P2
Possible paths for Ct
Player 5
Rebound
End of possession
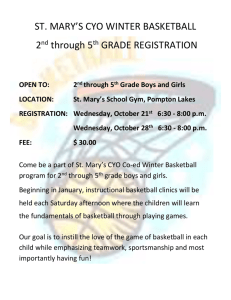
Figure 1: Schematic of the coarsened possession process C, with states (rectangles) and possible
state transitions (arrows) shown. The unshaded states in the first row compose Cposs . Here, states
corresponding to distinct ballhandlers are grouped together (Player 1 through 5), and the discretized
court in each group represents the player’s coarsened position and defended state. The gray shaded
rectangles are transition states, Ctrans , while the rectangles in the third row represent the end states,
Cend . Blue arrows represent possible macrotransition entrances (and red arrows, macrotransition
exits) when Player 1 has the ball; these terms are introduced in Section ??.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Ctrans
Turnover
Cend
Made 2pt
Shot
Made 3pt
Player 4
Pass to P5
Player 3
Pass to P4
Cposs
Player 2
Pass to P3
Player 1
Pass to P2
Possible paths for Ct
Player 5
Rebound
End of possession
Figure 1: Schematic of the coarsened possession process C, with states (rectangles) and possible
min{s : s > t, Cs ∈ Ctrans } if Ct ∈ Cposs
state transitions (arrows)
τt = shown. The unshaded states in the first row compose Cposs . Here, states
corresponding to distinct ballhandlers
are grouped together (Player
1 tthrough
5), and the discretized
t
if C
6∈ Cposs
court in each group represents the player’s coarsened position and defended state. The gray shaded
δt =states,
min{sCtrans
: s, ≥
τt ,the
Cs rectangles
6∈ Ctrans }.
rectangles are transition
while
in the third row represent the end states,
Cend . Blue arrows represent possible macrotransition entrances (and red arrows, macrotransition
exits) when Player 1 has the ball; these terms are introduced in Section ??.
(
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Stopping times for switching resolutions
(
min{s : s > t, Cs ∈ Ctrans }
τt =
t
δt = min{s : s ≥ τt , Cs 6∈ Ctrans }.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
if Ct ∈ Cposs
if Ct ∈
6 Cposs
August 11, 2015
Stopping times for switching resolutions
(
min{s : s > t, Cs ∈ Ctrans }
τt =
t
δt = min{s : s ≥ τt , Cs 6∈ Ctrans }.
if Ct ∈ Cposs
if Ct ∈
6 Cposs
Key assumptions:
A1 C is marginally semi-Markov.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Stopping times for switching resolutions
(
min{s : s > t, Cs ∈ Ctrans }
τt =
t
δt = min{s : s ≥ τt , Cs 6∈ Ctrans }.
if Ct ∈ Cposs
if Ct ∈
6 Cposs
Key assumptions:
A1 C is marginally semi-Markov.
(Z )
A2 For all s > δt , P(Cs |Cδt , Ft ) = P(Cs |Cδt ).
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Stopping times for switching resolutions
(
min{s : s > t, Cs ∈ Ctrans }
τt =
t
δt = min{s : s ≥ τt , Cs 6∈ Ctrans }.
if Ct ∈ Cposs
if Ct ∈
6 Cposs
Key assumptions:
A1 C is marginally semi-Markov.
(Z )
A2 For all s > δt , P(Cs |Cδt , Ft ) = P(Cs |Cδt ).
Theorem
Assume (A1)–(A2), then for all 0 ≤ t < T ,
X
(Z )
νt =
E[X |Cδt = c]P(Cδt = c|Ft ).
c∈{Ctrans ∪Cend }
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Multiresolution models
EPV:
νt =
(Z )
X
c∈{Ctrans ∪Cend }
Dan Cervone (Harvard)
E[X |Cδt = c]P(Cδt = c|Ft ).
Multiresolution Basketball Modeling
August 11, 2015
Multiresolution models
EPV:
(Z )
X
νt =
c∈{Ctrans ∪Cend }
E[X |Cδt = c]P(Cδt = c|Ft ).
Let M(t) be the event {τt ≤ t + }.
(Z )
M1 P(Zt+ |M(t)c , Ft ): the microtransition model.
(Z )
M2 P(M(t)|Ft ): the macrotransition entry model.
(Z )
M3 P(Cδt |M(t), Ft ): the macrotransition exit model.
M4 P, with Pqr = P(C (n+1) = cr |C (n) = cq ): the Markov transition probability
matrix.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Multiresolution models
EPV:
(Z )
X
νt =
c∈{Ctrans ∪Cend }
E[X |Cδt = c]P(Cδt = c|Ft ).
Let M(t) be the event {τt ≤ t + }.
(Z )
M1 P(Zt+ |M(t)c , Ft ): the microtransition model.
(Z )
M2 P(M(t)|Ft ): the macrotransition entry model.
(Z )
M3 P(Cδt |M(t), Ft ): the macrotransition exit model.
M4 P, with Pqr = P(C (n+1) = cr |C (n) = cq ): the Markov transition probability
matrix.
Monte Carlo computation of νt :
(Z )
Draw Cδt |Ft using (M1)–(M3).
Calculate E[X |Cδt ] using (M4).
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Microtransition model
Player `’s position at time t is z` (t) = (x ` (t), y ` (t)).
x ` (t + ) = x ` (t) + αx` [x ` (t) − x ` (t − )] + ηx` (t)
ηx` (t) ∼ N (µ`x (z` (t)), (σx` )2 ).
µx has Gaussian Process prior.
y ` (t) modeled analogously (and independently).
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Microtransition model
Player `’s position at time t is z` (t) = (x ` (t), y ` (t)).
x ` (t + ) = x ` (t) + αx` [x ` (t) − x ` (t − )] + ηx` (t)
ηx` (t) ∼ N (µ`x (z` (t)), (σx` )2 ).
µx has Gaussian Process prior.
y ` (t) modeled analogously (and independently).
TONY PARKER WITH BALL
Dan Cervone (Harvard)
DWIGHT HOWARD WITH BALL
Multiresolution Basketball Modeling
August 11, 2015
Microtransition model
Player `’s position at time t is z` (t) = (x ` (t), y ` (t)).
x ` (t + ) = x ` (t) + αx` [x ` (t) − x ` (t − )] + ηx` (t)
ηx` (t) ∼ N (µ`x (z` (t)), (σx` )2 ).
µx has Gaussian Process prior.
y ` (t) modeled analogously (and independently).
TONY PARKER WITHOUT BALL
Dan Cervone (Harvard)
DWIGHT HOWARD WITHOUT BALL
Multiresolution Basketball Modeling
August 11, 2015
Microtransition model
Player `’s position at time t is z` (t) = (x ` (t), y ` (t)).
x ` (t + ) = x ` (t) + αx` [x ` (t) − x ` (t − )] + ηx` (t)
ηx` (t) ∼ N (µ`x (z` (t)), (σx` )2 ).
µx has Gaussian Process prior.
y ` (t) modeled analogously (and independently).
TONY PARKER WITHOUT BALL
DWIGHT HOWARD WITHOUT BALL
Defensive microtransition model based on defensive matchups
[Franks et al., 2015].
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Macrotransition entry model
Recall M(t) = {τt ≤ t + }:
Six different “types”, based on entry state Cτt , ∪6j=1 Mj (t) = M(t).
(Z )
Hazards: λj (t) = lim→0
P(Mj (t)|Ft
)
.
log(λj (t)) = [Wj` (t)]0 β `j + ξj` z` (t)
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Macrotransition entry model
Recall M(t) = {τt ≤ t + }:
Six different “types”, based on entry state Cτt , ∪6j=1 Mj (t) = M(t).
(Z )
Hazards: λj (t) = lim→0
P(Mj (t)|Ft
)
.
log(λj (t)) = [Wj` (t)]0 β `j + ξj` z` (t)
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Macrotransition entry model
Recall M(t) = {τt ≤ t + }:
Six different “types”, based on entry state Cτt , ∪6j=1 Mj (t) = M(t).
(Z )
Hazards: λj (t) = lim→0
P(Mj (t)|Ft
)
.
log(λj (t)) = [Wj` (t)]0 β `j + ξj` z` (t) + ξ˜j` (zj (t)) 1[j ≤ 4]
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Hierarchical modeling
Dwight Howard’s shot chart:
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Hierarchical modeling
Shrinkage needed:
Across space.
Across different players.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Basis representation of spatial effects
Spatial effects ξj`
`: ballcarrier identity.
j: macrotransition type (pass, shot, turnover).
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Basis representation of spatial effects
Spatial effects ξj`
`: ballcarrier identity.
j: macrotransition type (pass, shot, turnover).
Functional basis representation
ξj` (z) = [wj` ]0 φj (z).
φj = (φji . . . φjd )0 : d spatial basis functions.
wj` : weights/loadings.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Basis representation of spatial effects
Spatial effects ξj`
`: ballcarrier identity.
j: macrotransition type (pass, shot, turnover).
Functional basis representation
ξj` (z) = [wj` ]0 φj (z).
φj = (φji . . . φjd )0 : d spatial basis functions.
wj` : weights/loadings.
Information sharing
φj allows for non-stationarity, correlations between disjoint regions
[Higdon, 2002].
wj` : weights across players follow a CAR model [Besag, 1974] based on player
similarity graph H.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Basis representation of spatial effects
Basis functions φj learned in pre-processing step:
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Basis representation of spatial effects
Basis functions φj learned in pre-processing step:
Graph H learned from players’ court occupancy distribution:
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Inference
“Partially Bayes” estimation of all model parameters:
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Inference
“Partially Bayes” estimation of all model parameters:
Multiresolution transition models provide partial likelihood factorization
[Cox, 1975].
All model parameters estimated using R-INLA software
[Rue et al., 2009, Lindgren et al., 2011].
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Inference
“Partially Bayes” estimation of all model parameters:
Multiresolution transition models provide partial likelihood factorization
[Cox, 1975].
All model parameters estimated using R-INLA software
[Rue et al., 2009, Lindgren et al., 2011].
Distributed computing implementation:
Preprocessing involves low-resource, highly parallelizable tasks.
Parameter estimation involves several CPU- and memory-intensive tasks.
Calculating EPV from parameter estimates involves low-resource, highly
parallelizable tasks.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
1.6
New insights from basketball possessions
RASHARD
LEWIS
POSS.
LEBRON JAMES POSSESSION
James
shot
Splits the defense;
clear path to
basket
Slight dip in EPV after
crossing 3 point line
0
3
Pass
{
Runs behind
basket and
defenders close
Accelerates
into the
paint
Pass
{
1.0
1.2
Accelerates
towards basket
Slight dip in EPV after
crossing 3 point line
EPV constant while
pass is en route
0.8
EPV
1.4
NORRIS COLE POSSESSION
6
9
12
15
18
time
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
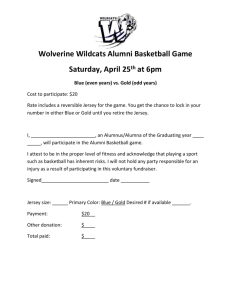
New insights from basketball possessions
1.6
LEGEND
1.4
1.09
2V
P 0.00
D
2
A
MOVEMENT
A
Macro
4 V 1.01
1.2
History
Micro
MACROTRANSITION VALUE (V)
P 0.06
3
High
Medium
Low
4
V 1.42
P 0.83
C
1.0
EPV
3
V 0.98
P 0.04
1
15
0.8
B
MACROTRANSITION PROBABILITY (P)
High
Medium
Low
P 0.04
TURNOVER
V 0.00
P 0.02
OTHER
V 0.99
P 0.02
3
C
5 V 1.03
0
3
6
9
12
15
18
time
V 1.02
P 0.03
V 0.98
P 0.04
2
3
B
2
V 1.01
P 0.04
2
2
4 V 1.01
3
V 1.00 1
P 0.13
3
4
115
V 1.17
P 0.27
2
V 1.09
P 0.01
2
V 1.01
P 0.01
2
DEFENSE
Deron Williams 1
Jason Terry 2
Joe Johnson 3
Andray Blatche 4
Brook Lopez 5
D
1
V 0.98
3 P 0.04
1
1.01
4V
P 0.61
P 0.23
5 1
OFFENSE
Norris Cole
Ray Allen
3 Rashard Lewis
4 LeBron James
5 Chris Bosh
1
3
4
V 1.01
P 0.05
4
4
V 1.50
P 0.83
5
5 V 1.05
5
V 1.03
P 0.12
Dan Cervone (Harvard)
TURNOVER
V 0.00
P 0.16
OTHER
V 1.00
P 0.16
P 0.04
TURNOVER
V 0.00
P 0.01
OTHER
V 0.97
P 0.13
Multiresolution Basketball Modeling
V 1.03 5
P 0.00
TURNOVER
V 0.00
P 0.04
OTHER
V 1.06
P 0.06
August 11, 2015
New metrics for player performance
EPV-added:
Rank
1
2
3
4
5
6
7
8
9
10
Player
Kevin Durant
LeBron James
Jose Calderon
Dirk Nowitzki
Stephen Curry
Kyle Korver
Serge Ibaka
Channing Frye
Al Horford
Goran Dragic
EPVA
Rank
3.26
2.96
2.79
2.69
2.50
2.01
1.70
1.65
1.55
1.54
277
278
279
280
281
282
283
284
285
286
Player
Zaza Pachulia
DeMarcus Cousins
Gordon Hayward
Jimmy Butler
Rodney Stuckey
Ersan Ilyasova
DeMar DeRozan
Rajon Rondo
Ricky Rubio
Rudy Gay
EPVA
-1.55
-1.59
-1.61
-1.61
-1.63
-1.89
-2.03
-2.27
-2.36
-2.59
Table : Top 10 and bottom 10 players by EPV-added (EPVA) per game in 2013-14,
minimum 500 touches during season.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
New metrics for player performance
Shot satisfaction:
Rank
1
2
3
4
5
6
7
8
9
10
Player
Mason Plumlee
Pablo Prigioni
Mike Miller
Andre Drummond
Brandan Wright
DeAndre Jordan
Kyle Korver
Jose Calderon
Jodie Meeks
Anthony Tolliver
Satis.
Rank
0.35
0.31
0.27
0.26
0.24
0.24
0.24
0.22
0.22
0.22
277
278
279
280
281
282
283
284
285
286
Player
Satis.
Garrett Temple
Kevin Garnett
Shane Larkin
Tayshaun Prince
Dennis Schroder
LaMarcus Aldridge
Ricky Rubio
Roy Hibbert
Will Bynum
Darrell Arthur
-0.02
-0.02
-0.02
-0.03
-0.04
-0.04
-0.04
-0.05
-0.05
-0.05
Table : Top 10 and bottom 10 players by shot satisfaction in 2013-14, minimum 500
touches during season.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Acknowledgements and future work
Our EPV framework can be extended to better incorporate unique basketball
strategies:
Additional macrotransitions can be defined, such as pick and rolls, screens,
and other set plays.
Use more information in defensive matchups (only defender locations, not
identities, are currently used).
Summarize and aggregate EPV estimates into useful player- or team-specific
metrics.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
Acknowledgements and future work
Our EPV framework can be extended to better incorporate unique basketball
strategies:
Additional macrotransitions can be defined, such as pick and rolls, screens,
and other set plays.
Use more information in defensive matchups (only defender locations, not
identities, are currently used).
Summarize and aggregate EPV estimates into useful player- or team-specific
metrics.
Thanks to:
Co-authors: Alex D’Amour, Luke Bornn, Kirk Goldsberry.
Colleagues: Alex Franks, Andrew Miller.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015
References I
[0]
Besag, J. (1974).
Spatial interaction and the statistical analysis of lattice systems.
Journal of the Royal Statistical Society: Series B (Methodological), 36(2):192–236.
[0]
Cox, D. R. (1975).
A note on partially bayes inference and the linear model.
Biometrika, 62(3):651–654.
[0]
Franks, A., Miller, A., Bornn, L., and Goldsberry, K. (2015).
Characterizing the spatial structure of defensive skill in professional basketball.
Annals of Applied Statistics.
[0]
Higdon, D. (2002).
Space and space-time modeling using process convolutions.
In Quantitative Methods for Current Environmental Issues, pages 37–56. Springer, New York, NY.
[0]
Lindgren, F., Rue, H., and Lindström, J. (2011).
An explicit link between Gaussian fields and Gaussian Markov random fields: the stochastic partial differential equation approach.
Journal of the Royal Statistical Society: Series B (Methodological), 73(4):423–498.
[0]
Rue, H., Martino, S., and Chopin, N. (2009).
Approximate Bayesian inference for latent Gaussian models by using integrated nested Laplace approximations.
Journal of the Royal Statistical Society: Series B (Methodological), 71(2):319–392.
Dan Cervone (Harvard)
Multiresolution Basketball Modeling
August 11, 2015