Chapter 8 Elliptic Equations
advertisement

Chapter 8
Elliptic Equations
8.1
Introduction
In Chapter 6 we discussed the canonical form of elliptic equations in two variables. Up to
lower order terms we found that the canonical form was given in terms of the Laplacian
∆u = uxx + uyy = 0. This equation is called the Laplace equation and, besides the theory of
partial differential equations, it is also extremely important in the study of complex analysis.
More generally we will consider the Laplacian in Rn
∆u =
n
X
∂2u
j=1
∂x2j
and the Laplace equation
∆u = 0.
In particular, functions satisfying this condition are called harmonic functions. We will have
much more to say about this later.
8.1.1
Harmonic Functions
In R2 the Laplacian in polar coordinates is given by
µ
¶
1 ∂
∂u
1 ∂2u
∆u =
r
+ 2 2,
r ∂r
∂r
r ∂θ
(8.1.1)
and for n > 2,
1
∂
∆u = (n−1)
r
∂r
µ
r
(n−1) ∂u
∂r
1
¶
+
1
∆∗ u,
r2
(8.1.2)
2
CHAPTER 8. ELLIPTIC EQUATIONS
where ∆∗ is the Laplace operator on the unit sphere S n−1 . For n = 3 we have
µ
¶
1 ∂
∂u
1 ∂2u
∆∗ u =
.
sin ϕ
+
sin ϕ ∂ϕ
∂ϕ
sin2 ϕ ∂θ2
Let us seek a harmonic function with the
property that it depends only on the radial
qP
n
2
variable r, i.e., f (x) = φ(r) where r = |x| =
j=1 xj .
Proposition 8.1.1. If f (x) = φ(r) where r = |x|, x ∈ Rn , then
∆f (x) = φ00 (r) +
(n − 1) 0
φ (r).
r
Proof. Since ∂r/∂xj = xj /r, we have
∆f (x) =
n
X
∂xj
hx
j=1
=
n · 2
X
xj
j=1
j
r
i
φ (r)
0
¸
x2j 0
1 0
φ (r) + φ (r) − 3 φ (r)
r2
r
r
00
= φ00 (r) +
n 0
1
φ (r) − φ0 (r)
r
r
= φ00 (r) +
(n − 1) 0
φ (r).
r
Corollary 8.1.1. If f (x) = φ(r) is a radial function on Rn , then f satisfies ∆f = 0 on
Rn \{0} if and only if
1. φ(r) = a + br(2−n) for n > 2,
2. φ(r) = a + b log(r) for n = 2,
Proof. From Proposition 8.1.1 we have
φ00 (r)
(1 − n)
=
.
0
φ (r)
r
Integrating once we get
or
log(φ0 (r)) = (1 − n) log(r) + log(c)
φ0 (r) = cr(1−n) .
One more integration give the desired answer.
8.1. INTRODUCTION
3
Next we seek harmonic functions that are products of radial functions R(r) and angular
functions Θ(θ). Then from (8.1.3) in the case n = 2 we have
r2 R00 (r)Θ(θ) + rR0 (r)Θ(θ) + R(r)Θ00 (θ) = 0
or, separating variables,
r2 R00 (r) + rR0 (r)
Θ̈(θ)
=−
=µ
R(r)
Θ(θ)
or
r2 R00 (r) + rR0 (r) − µR(r) = 0,
(8.1.3)
Θ00 (θ) + µΘ(θ).
We recognize the first equation in (8.1.3) as an Euler equation. We obtain
µ=0
c1 + c2 ln(r),
√
√
c1 r µ + c2 r − µ ,
µ>0
Rµ (r) =
¡
¡
¢
¢¤
α£
r c1 cos ln rβ + c2 sin ln rβ ,
µ<0
The angular dependence is given by
c1 + c2 θ,
√
√
c1 cos( µ θ) + c2 sin( µ θ),
Θµ (θ) =
√
√
c1 cosh( −µ θ) + c2 sinh( −µ θ),
µ=0
µ>0
µ<0
As for examples in rectangular coordinates we recall some facts from elementary complex
analysis. With z = x + iy we consider complex valued functions of the complex variable z.
f is differentiable with respect to the complex variable z at a point z0 if and only if
f 0 (z0 ) = lim
z→z0
f (z) − f (z0 )
exists.
z − z0
If we write f (z) in terms of its real and imaginary parts f (z) = f (x, y) = u(x, y) + i v(x, y)
then it is well known that f is differentiable if and only if the real and imaginary parts u
and v satisfy the Cauchy-Riemann Equations
∂u
∂v
=
,
∂x
∂y
∂u
∂v
=− .
∂y
∂x
4
CHAPTER 8. ELLIPTIC EQUATIONS
If u and v have continuous second partials then the Cauchy-Riemann Equations imply
∆u(x, y) = 0.
This says that the real and imaginary parts of a complex analytic function are harmonic
functions.
Now since the regular rules of differentiation apply in the case of complex valed functions
we can readily find many harmonic functions. For example, it is easy to show that sin(z),
cos(z), and exp(z) are analytic functions. We have
cos(x + iy) = cos(x) cosh(y) − i sin(x) sinh(y),
sin(x + iy) = sin(x) cosh(y) + i cos(x) sinh(y),
exp(x + iy) = ex cos(y) + iex sin(y).
From this we see, for example, that
cos(x) cosh(y), sin(x) sinh(y), sin(x) cosh(y), cos(x) sinh(y), ex cos(y), ex sin(y)
are harmonic functions.
8.1.2
Boundary Value Problems
Many problems that involve elliptic equations arise as steady state problems for what was
originally a time dependent problem. That is we seek solutions of time dependent problems
that happen to be independent of time. One such resulting problem that we will study
quite a bit is the so called Dirichlet problem. Such a problem arises for example in the
study of steady state temperature distribution in a domain Ω ⊂ Rn given the temperature
distribution on the boundary ∂Ω of Ω. In this case we seek a function u(x) satisfying
∆u = 0, x ∈ Ω ⊂ Rn ,
u(x) = f (x), x ∈ ∂Ω.
If, instead of the temperature, we are given the flux on the boundary, then we need to solve
the so called Neumann Problem
∆u = 0,
x ∈ Ω ⊂ Rn ,
∂u
(x) = f (x),
∂ν
where
x ∈ ∂Ω.
∂u
(x) represents the normal derivative to the boundary of Ω.
∂ν
8.1. INTRODUCTION
5
One final example of a common boundary value problem that arises in applications is
the so called Robin Problem
∆u = 0,
∂u
(x) + αu(x) = β,
∂ν
8.1.3
x ∈ Ω ⊂ Rn ,
x ∈ ∂Ω.
Green’s Identities and Uniqueness
Let Ω be a smooth, bounded domain in Rn , let u and v be C 2 (Ω) and define V = v∇u. Then
divV = vdiv(∇u) + ∇v · ∇u = v∆u + ∇v · ∇u.
Also note that
¡
¢
∂u
v∇u (x) · ν(x) = v(x) (x).
∂ν
So by the Divergence Theorem we have
Z
Z
∂u
v(x) (x) dσ(x) =
V (x) · ν(x) dσ
∂ν
∂Ω
∂Ω
Z
=
divV (x) dx
Ω
Z
(v(x)∆u(x) + ∇v(x) · ∇u(x)) dx
=
Ω
where dσ denotes surface measure on ∂Ω. Thus we obtain
Z
Z
£
¤
∂u
v(x)∆u(x) + ∇v(x) · ∇u(x) dx.
v(x) (x) dσ(x) =
∂ν
∂Ω
Ω
(8.1.4)
If in (8.1.4) we interchange the roles of v and u and subtract the result from (8.1.4) we
obtain
¶
Z µ
Z
∂u
∂v
v
[v∆u − u∆v] dx.
(8.1.5)
−u
dσ =
∂ν
∂ν
∂Ω
Ω
The equations (8.1.4) and (8.1.3) are refered to as Green’s Identities. These formulas
actually hold for u, v ∈ C 2 (Ω) ∩ C 1 (Ω). provided the integrals exist and Ω is sufficiently
smooth. For example if Ω is a bounded domain with piecewise C 1 boundary.
There are several useful consequences of the Green’s indentities.
Z
∂u
Proposition 8.1.2. If u is harmonic on Ω then
(x) dσ = 0.
∂Ω ∂ν
6
CHAPTER 8. ELLIPTIC EQUATIONS
Proof. Take v = 1 in (8.1.4).
Note that this gives a necessary solvability condition for
Z the Neumann problem. Namely,
∂u
g(x) dσ = 0.
(x)|x∈∂Ω = g(x) then g must satisfy
if ∆u(x) = 0 and
∂ν
∂Ω
Theorem 8.1.1. C 2 (Ω) solutions of the Dirichlet or Robin problem are unique. Any two
solutions of the Neumann problem that are C 2 (Ω) differ by a constant.
Proof. If w = u − v is the difference of two solutions for the Neumann problem (or even
Dirichlet) then in (8.1.4) we let u = v = w and we have
Z
Z
¡
¢
∂w
w∆w + |∇w|2 dx
dσ =
w
∂ν
∂Ω
Ω
∂w
Thus since w ∈ C 2 (Ω) ∩ C 1 (Ω) and satisfies ∆w = 0, if either w = 0 (DP) or
= 0 (NP)
∂ν
on ∂Ω, then
Z
|∇w|2 dx = 0
Ω
which implies that w ≡ c where c is a constant. For the Neumann problem this means that
u = v + c.
On the other hand for the Dirichlet problem w = 0 on ∂Ω which implies that the constant
must be zero. Thus we see that u = v in Ω.
If u, v satisfy the Robin Problem then
Z
Z
2
|∇w| dx = −
αw2 dσ
Ω
Thus we have
∂Ω
Z
Z
|∇w| dx = 0 and
2
Ω
−
αw2 dσ = 0.
∂Ω
Since the left side is greater than or equal zero and the right is less than or equal zero we
see that both integrals must be zero. The first integral set equal to zero gives that w is a
constant and the second set to zero gives that the constant must be zero. Thus w ≡ 0 and
we have u = v.
The above theorem would certainly hold if u, v ∈ C 2 (Ω)∩C 1 (Ω) and the relevant integrals
existed. For Neumann or Robin problems it is natural to seek a solution that is C 1 (Ω)
because the normal derivatives are prescribed. We would prefer not to require u ∈ C 2 (Ω) for
uniqueness in the Dirichlet. We shall prove such a stronger uniqueness result as a consequence
of the results of the next section.
8.2. FUNDAMENTAL SOLUTIONS AND GREEN’S FUNCTIONS
8.2
7
Fundamental Solutions and Green’s Functions
We have seen that ln r (r = |x|) is harmonic in R2 \{0} and r2−n is harmonic in Rn \{0},
for n ≥ 3. In terms of these solutions we define the Fundamental Solutions for Laplaces
equation with pole at x = ξ by
1
− ln |x − ξ|,
2π
K(x, ξ) =
1
|x − ξ|2−n ,
(n − 2)wn
n=2
(8.2.1)
n≥3
where wn , as usual, denotes the surface area of the unit sphere in Rn , i.e.,
wn =
2π n/2
.
Γ(n/2)
In terms of these solutions we are able to provide the implicit representation formulae of
smooth functions in Ω.
Definition 8.2.1. A normal domain Ω ⊂ Rn is a bounded domain satisfying the following:
1. The boundary ∂Ω of Ω consists of a finite number of smooth surfaces. (Recall that a
smooth surface is a level surface of a C 1 function with nonvanishing gradient).
2. Any straight line parallel to a coordinate axis either intersects ∂Ω at a finite number
of points or has a whole interval in common with ∂Ω.
Theorem 8.2.1. Let u ∈ C 2 (Ω), Ω a normal domain. Then
¸
Z ·
∂
∂
u(ξ) =
K(x, ξ)
u(x) − u(x) K(x, ξ) dσ(x)
∂n
∂n
∂Ω
Z
−
K(x, ξ)∆u(x) dx.
Ω
Proof. The proof for n = 2 is left as an exercise. The proof for all n ≥ 3 are identical.
We will carry out the details for the case n = 3, pointing out the differences for higher
dimensions.
8
CHAPTER 8. ELLIPTIC EQUATIONS
n
n²
ξ
Ω²
Ω
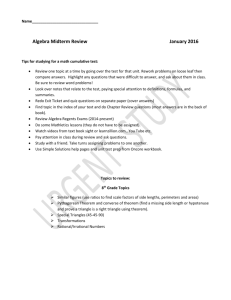
In the figure we have Ω² = Ω\B(ξ, ²) where B(ξ, ²) is the ball centered at ξ of radius ².
Here we assume that ² is small enough so that B(ξ, ²) ⊂ Int (Ω).
From Green’s identity (8.1.5) applied to u and v = K(x, ξ) and using that ∆v = 0 in Ω² ,
we have
µ
¶¾
Z
Z ½
1
1 ∂u
1
1
∂
1
∆u dx =
−u
dσ(x)
(8.2.2)
4π
|x − ξ|
4π
|x − ξ| ∂n
∂n |x − ξ|
Ω²
∂Ω
1
+
4π
½
Z
|x−ξ|=²
1
∂
∂u
−u
|x − ξ| ∂n²
∂n²
µ
1
|x − ξ|
¶¾
dσ(x)
= I1 + I2 .
Since u ∈ C 2 (Ω),
¯
¯
¯ Z
¯
Z
¯1
¯
1
1
1
¯
¯
∆u dx¯ ≤ C
dx < ∞.
¯ 4π
|x − ξ|
4π
|x − ξ|
¯
¯
Ω
(8.2.3)
Ω
The Lebesque Dominated Convergence Theorem gives conditions under which a limit can be
passed inside an integral. Namely, if {fj }∞
j=1 is a sequence of (measurable) functions on Ω
(a finite measure space), |fj (x)| ≤ |f (x)| for all x ∈ Ω, fj (x) → f (x) for a.e. (almost every)
x ∈ Ω and
Z
|f (x)| dx < ∞
Ω
Z
then
lim
j→∞
Z
fj (x) dx =
Ω
f (x) dx.
Ω
8.2. FUNDAMENTAL SOLUTIONS AND GREEN’S FUNCTIONS
9
In the present case we can apply the Lebesque Dominated Convergence Theorem to
obtain
Z
Z
1
1
1
1
lim
∆u(x) dx =
∆u(x) dx.
²→0 4π
|x − ξ|
4π
|x − ξ|
Ω²
Ω
Without real analysis and the Lebesque theory we must appeal to more elementary machinery and thereby more delicate and technical estimates. Namely,
we write
1
4π
Z
Ω
We have
¯
¯
¯
¯
¯
¯
¯
1
1
∆u dx =
|x − ξ|
4π
Z
|x−ξ|≤²
Z
Ω²
∆u
1
dx +
|x − ξ|
4π
Z
|x−ξ|<²
∆u
dx.
|x − ξ|
¯
¯
Z2π Zπ Zρ
¯
∆u
1 2
¯
x dx¯ ≤ C
ρ sin ϕ dρ dϕ dθ ≤ C0 ²2 .
¯
|x − ξ|
ρ
¯
0 0 0
Now we obtain (8.2.3) by taking the limit as ² goes to zero in (8.2.3).
Turning to I2 we first write r = |x − ξ| and note that on |x − ξ| = ²
µ ¶
∂
1
∂ 1
1
=−
= 2.
∂n² |x − ξ|
∂r r
r
Thus
1
I2 =
4π
·
Z
|x−ξ|=²
1
−
4π
¡
¢1
1
∂u
− u(x) − u(ξ) 2
|x − ξ| ∂n²
²
Z
u(ξ)
|x−ξ|=²
¸
1
dσ(x)
²2
≡I − u(ξ).
Moreover,
¯ ¯
¯ ∂u ¯
|I| ≤ ² max ¯¯ ¯¯ + max |u(x) − u(ξ)|
|x−ξ|=² ∂n
|x−ξ|=²
dσ(x)
(8.2.4)
10
CHAPTER 8. ELLIPTIC EQUATIONS
and from the smoothness assumptions on u we obtain
lim I = 0
²→0
With these observations and on passing to the limit ² → 0 in (8.2.2) the result follows.
Remark 8.2.1. To prove the result for Rn , n ≥ 3 recall that if z = rw, |w| = 1, then
dσz = rn−1 dw where dw is surface measure on the unit sphere. Moreover, z → |z|λ is
integrable near the origin if and only if (λ + n) > 0. Consequently the analogous statement
to (8.2.3) follows since 1/|x − ξ|(n−2) is integrable. Indeed,
Z
Z
Z
∆u
∆u
∆u
dx =
dx +
dx.
(n−2)
(n−2)
|x − ξ|
|x − ξ|
|x − ξ|(n−2)
Ω
|x−ξ|<²
Ω²
Now recall that (x − ξ) = ρw, |w| = 1, dσx = rn−1 dw and we have
Z
Z ²Z
1
1
dx =
dσx dρ
(n−2)
(n−2)
|x − ξ|
0
|x−ξ|=ρ |x − ξ|
|x−ξ|<²
Z ²Z
1
=
0
|w|=1
ρ
ρ(n−2)
Z
(n−1)
dw dρ = wn
²
ρ dρ = O(²2 ).
0
On |x − ξ| = ² we also have
¢
∂ ¡
∂ ¡ (2−n) ¢ ¯¯
|x − ξ|(2−n) = −
r
= (n − 2)²1−n .
r=²
∂n²
∂r
Thus the boundary integral corresponding to I2 can handled as follows
¸
Z ·
1
∂u
1
(1−n)
dσ(x)
− [u(x) − u(ξ)](n − 2)²
I2 =
(n − 2)wn
|x − ξ|(n−2) ∂n
|x−ξ|=²
u(ξ)
−
wn
Z
²(1−n) dσ(x).
|x−ξ|=²
Set x − ξ = ²w, where |w| = 1. Then
Z
u(ξ)
²(1−n) ²(n−1) dσ = I − u(ξ).
I2 = I −
wn |w|=1
Just as above it follows that
¯ ¯
¯ ∂u ¯
²
²→0
|I| ≤ max ¯¯ ¯¯
+ max |u(x) − u(ξ)| −−→ 0.
x
∂n (n − 2)
8.2. FUNDAMENTAL SOLUTIONS AND GREEN’S FUNCTIONS
11
As an immediate consequence of Theorem 8.2.1 we see that if Ω is a normal domain, u
is harmonic and C 2 (Ω), then
¸
Z ·
∂u
∂
K(x, ξ)
− u(x) K(x, ξ) dσ.
(8.2.5)
u(ξ) =
∂n
∂n
∂Ω
Now suppose that for each ξ, w(x, ξ) ∈ C 2 (Ω) and harmonic. Then Green’s identity applied
to u and w gives
¸
Z ·
∂w
∂u
0=
u
−w
dσ.
∂n
∂n
Ω
If we add this (8.2.5) then
·
¸
∂u
∂
(K − w)
u(ξ) =
− u(x) (K − w) dσ
∂n
∂n
∂Ω
Z
(8.2.6)
Suppose we can find w so that for each ξ,
w(x, ξ) = K(x, ξ),
for all x ∈ ∂Ω.
In this case we define
G(x, ξ) = K(x, ξ) − w(x, ξ).
(8.2.7)
Then G(x, ξ) is harmonic in Ω with a pole at x = ξ and satisfies the homogeneous
Dirichlet boundary conditions
G(x, ξ) = 0, x ∈ ∂Ω.
If u is a C 2 (Ω) solution of
∆u = 0, x ∈ Ω,
u(x) = f (x), x ∈ ∂Ω,
(8.2.8)
then from (8.2.6) it would satisfy
Z
u(ξ) = −
∂Ω
or, defining P (x, y) = −
∂
G(x, ξ) f (x) dσ(x),
∂n
∂
G(y, x), we have
∂n
Z
u(x) =
P (x, y) f (y) dσ(y).
(8.2.9)
∂Ω
We call (8.2.9) the Poisson Integral Formula and P (x, ξ) is called the Poisson Kernel.
12
CHAPTER 8. ELLIPTIC EQUATIONS
Note that we have arrived at (8.2.9) assuming that the Dirichlet problem (8.2.8) has a
solution and G(x, ξ) exists. For special domains we shall construct G(x, ξ) explicitly and
verify that (8.2.9) is indeed a solution of the Dirichlet problem.
The function G(x, ξ) defined in (8.2.7) is called the Green’s Function for the Laplacian
in Ω. Thus solving the Dirichlet problem (8.2.8) reduces to solving a very spcecial Diriclet
problem, namely,
∆x w(x, ξ) = 0, x ∈ Ω\{ξ} for all ξ ∈ Ω,
w(x, ξ) = K(x, ξ).
(8.2.10)
The advantage of dealing with this problem is that it lends itself to a physical interpretation.
In fact Green gave a “physical argument” for the existence of the Green’s function based
on the notion that G(x, ξ) describes the electrical potential inside a grounded conductor
due to a point charge located at ξ. The Green’s function vanishes for x ∈ ∂Ω since the
conductor is grounded. Namely, consider S(0, R) as a perfecting conducting shell enclosing
a vacuum B(0, R), and let S(0, R) be grounded so the potential on S(0, R) is zero. Let a
negative charge be located at ξ ∈ B(0, R). This will induce a distribution of positive charge
on S(0, R) to keep the potential zero, and G(x, ξ) is defined to be the potential at ξ induced
induced by the charges at x and on S. Unfortunately, to make this mathematically rigorous
is nontrivial.
This interpretation of the Green’s function provides the motivation for the Method of
Images. This is a technique for constructing G(x, ξ) based on the idea that one introduces
the appropriate charge at a point ξ ∗ to cancel the electric potential on ∂Ω due to the charge
at ξ. We illustrate the idea with some specific examples.
Example 8.2.1. Green’s Function for B(0, R) ⊂ R3 :
ξR2
For ξ ∈ Ω, define ξ ∗ =
which is the symmetric point for ξ relative to the sphere
|ξ|2
S(0, R).
ξ∗
|ξ − x|
ξ
R
|ξ∗ − x|
x
Method of Images for the Sphere
8.2. FUNDAMENTAL SOLUTIONS AND GREEN’S FUNCTIONS
13
For this ξ ∗ we see that |ξ ∗ ||ξ| = R2 . This says that
|x|
|ξ ∗ |
=
|x|
|ξ|
and so the triangle 4(0, ξ ∗ , x) is similar to triangle 4(0, x, ξ) (where 4(a, b, c) denotes the
triangle with vertices at a, b, c). Thus we have
|x − ξ|
|ξ|
=
.
∗
|x − ξ |
R
We seek the Green’s function in the form
G(x, ξ) = K(x, ξ) − w(x, ξ)
1
1
α
1
=
−
4π |x − ξ| 4π |x − ξ ∗ |
Note that w(x, ξ) is harmonic in B(0, R) (since ξ ∗ 6∈ Ω) and when x ∈ S(0, R),
G(x, ξ) =
1
1
Rα
1
−
=0
4π |x − ξ| 4π|ξ| |x − ξ|
if α = |ξ|/R. Thus we arrive at
G(x, ξ) =
1
1
R
1
−
4π |x − ξ| 4π|ξ| |x − ξ ∗ |
Let γ denote the angle between x and ξ which is also the angle between x and ξ ∗ . The law
of cosines gives
|x − ξ|2 = |x|2 + |ξ|2 − 2|ξ||x| cos(γ)
and
|x − ξ ∗ |2 =|x|2 + |ξ ∗ |2 − 2|ξ ∗ ||x| cos(γ)
µ 2 ¶2
R
R2
2
− 2 |x| cos(γ).
= |x| +
|ξ|
|ξ|
Thus we have
1
1
1
1
p
=
4π |x − ξ|
4π |x|2 + |ξ|2 − 2|ξ||x| cos(γ)
and
1 R
1
1
1
1
p
=
∗
2
4
2
4π |ξ| |x − ξ | 4π (|ξ|/R) |x| + R /|ξ| − 2|x|R2 /|ξ| cos(γ)
1
1
p
=
.
4π |x|2 |ξ|2 /R2 + R2 − 2|x||ξ| cos(γ)
14
CHAPTER 8. ELLIPTIC EQUATIONS
¯
¯
¯
¯
∂
∂G
¯
G(x, ξ)¯¯
=
.
∂nx
∂|x| ¯|x|=R
x∈S(0,R)
Observe that
It is straightforward to show that
¯
1
∂G ¯¯
(|ξ|2 − R2 )
=
.
¯
2
2
∂n x∈S(0,R)
4πR
(R + |ξ| − 2R|ξ| cos(γ))3/2
µ
=
|ξ|2 − R2 )
4πR
¶
1
.
|x − ξ|3
Thus if we know that the Diriclet problem
∆u = 0, x ∈ B(0, R)
u(x) = f (x), x ∈ S(0, R)
(8.2.11)
has a solution such that u ∈ C 2 (B(0, R)), then we know that this solution can be written as
µ
u(x) =
R2 − |x|2
4πR
¶Z
|y|=R
f (y)
dσ(y).
|x − y|3
(8.2.12)
With almost exactly the same argument it can be shown that Poisson’s formula for the
solution to (8.2.11) for B(0, R) ⊂ R2 takes the form
µ
u(x) =
R2 − |x|2
2πR
¶Z
|y|=R
f (y)
dσ(y),
|x − y|2
or, in polar coordinates,
1
u(r, θ) =
2π
Z
2π
0
R2 − r 2
f (ϕ) dϕ.
R2 + r2 − 2Rr cos(ϕ − θ)
(8.2.13)
In general for B(0, R) ⊂ Rn Poisson’s formula is
µ
u(x) =
R2 − |x|2
wn R
¶Z
|y|=R
f (y)
dσ(y).
|x − y|n
Later we will show that if f ∈ C(S(0, R)) then u given by the above formulas does indeed
define a function u ∈ C 2 (B(0, R)) ∩ C(B(0, R)) that satisfies (8.2.11). Before proving this
result we consider another example.
8.2. FUNDAMENTAL SOLUTIONS AND GREEN’S FUNCTIONS
15
Example 8.2.2. Green’s Function for Half-Plane: Consider the Dirichlet problem for
the upper half-plane in R2 .
∆u(x, y) = 0, R2+ = {(x, y) : x ∈ R, y > 0},
u(x, 0) = f (x), x ∈ R.
Just as in the previous example we construct a Green’s function using the method of images.
To this end, let ξ = (x0 , y0 ) be a point in R2+ . Then the reflection through through the plane
y = 0 (i.e., the boundary of R2+ ) is ξ ∗ = (x0 , −y0 ).
y
ξ = (x0 , y0)
x
ξ ∗ = (x0, −y0 )
Method of Images for the Sphere
By the method of images we seek the Green’s function in the form
i
p
p
1 h
− ln (x − x0 )2 + (y − y0 )2 + ln (x − x0 )2 + (y + y0 )2
2π ·
¸
1
(x − x0 )2 + (y + y0 )2
= ln
.
4π
(x − x0 )2 + (y − y0 )2
G((x, y), (x0 , y0 )) =
Clearly G is harmonic for (x, y) 6= (x0 , y0 ) and
G((x, 0), (x0 , y0 )) = 0.
¯
¯
∂G ¯¯
∂G ¯¯
1
y0
−
=
=
.
¯
¯
∂n y=0
∂y y=0 π ((x − x0 )2 + y02 )
Therefore we expect that the solution for the Dirichlet problem in the upper half plane is
given by
Z
f (x)
y0 ∞
u(x0 , y0 ) =
dx
π −∞ (x − x0 )2 + y02
16
CHAPTER 8. ELLIPTIC EQUATIONS
or, on renaming variables,
y
u(x, y) =
π
Z
∞
−∞
f (t)
dt.
(t − x)2 + y 2
If, more generally, we denote points in R(n+1) by (x, y) with x ∈ Rn and y ∈ R, then the
(n+1)
Poisson formula for the upper half-plane R+
is given by
Z
2y
f (ξ)
u(x, y) =
dξ.
w(n+1) Rn (|ξ − x|2 + y 2 )(n+1)/2
If f ∈ C(Rn ) ∩ L∞ (Rn ), then u is harmonic in R+
(n+1)
and u(x, 0) = f (x).
We conclude this section by pointing out a general property of the Green’s function.
Theorem 8.2.2. The Green’s function is symmetric, i.e., for all x and y in a bounded
domain Ω we have
G(x, ξ) = G(ξ, x)
Consequently, we have ∆ξ G = 0 and ∆x G = 0.
8.3
The Maximum Principle and its Consequences
Laplace’s equation governs the steady state response of many practical examples. If, for
example, a body is in thermal equilibrium, there can be no ‘hot’ or ‘cold’ spots because
heat energy would flow from regions of hoter to colder temperatures. In other words, the
equilibrium temperature cannot have a maximum or minimum at an interior point of the
body. This assertion is known as the maximum - minimum principle. For short it is usually
refered to as the maximum principle. This principle has far reaching consequences some of
which we will explore in this section.
The results of this section will rely on heavily on the earlier Green’s formulas (8.1.4) and
(8.1.5) and the Corollary 8.1.1. The proofs of following results follow those found in [2].
Theorem 8.3.1 (The Mean Value Theorem). Suppose that u is harmonic on an open
set Ω ⊂ Rn . If x ∈ Ω and r > 0 is small enough so that B(0, r) ⊂ Ω, then
Z
Z
1
1
u(y) dσ(y) =
u(x + rw) dσ(w).
(*)
u(x) = (n−1)
r
wn S(x,r)
wn |w|=1
Proof. The second equality follows from the first using the change of variables y → x + rw.
By employing an additional translation we can assume that x = 0. Namely, if we define
u
e(ξ) = u(x + ξ) and the equation (*) becomes
Z
Z
1
1
u
e(0) = u(x) =
u(x + rw) dσ(w) =
u
e(rw) dσ(w).
wn |w|=1
wn |w|=1
8.3. THE MAXIMUM PRINCIPLE AND ITS CONSEQUENCES
17
Thus we will prove (*) under the assumption that x = 0.
To establish the first equality we use the second Green’s identity (8.1.5), where we take
u to be the given harmonic function, v(y) = |y|(2−n) if n 6= 2 or v(y) = ln |y| if n = 2,
Ω = B(0, r)\B(0, ²) where 0 < ² < r. By Corollary 8.1.1, v is harmonic in Ω, and since the
normal to the sphere S(0, r) is given by n(y) = y/r we see that the normal derivative is
∂v
1X
yj ∂yj v = y · ∇y v.
=
∂n
r j=1
n
Thus we find, for n > 2,
∂v
1X
yj (2 − n)|y|(1−n)
=
∂n
r j=1
n
µ ¶
1 2yj
1
= r(1−n) (2 − n)r2 r−1 = (2 − n)r(1−n) .
2 |y|
r
A shorter calculation would be
∂r(2−n)
= (2 − n)r(1−n) .
∂r
Also, for the sphere S(0, ²), we get the constant −(2 − n)²(1−n) (where the minus sign occurs
because the orientation of S(0, ²) is opposite of S(0, r)). We also note for n = 2 that the
factor (2 − n) should be removed.
Now by the second Green’s Identity (8.1.5) we have
Z
µ
0=
S(0,r)
∂u
∂v
v
−u
∂n
∂n
Z
=r
(2−n)
S(0,r)
¶
Z
dσ −
S(0,e)
∂u
dσ + ²(2−n)
∂n
Z
S(0,²)
µ
∂u
∂v
v
−u
∂n
∂n
− (2 − n) r
Z
u dσ + (2 − n) ²
S(0,r)
dσ
∂u
dσ
∂n
Z
(1−n)
¶
(1−n)
u dσ,
S(0,²)
with suitable modification when n = 2. By Corollary 8.1.2, the first two terms in the last
sum vanish, so
Z
Z
1
1
u dσ = (n−1)
u dσ.
r(n−1) wn S(0,r)
²
wn S(0,²)
Now u is continuous so, since it is the mean value of u on S(0, ²), the the right side converges
18
CHAPTER 8. ELLIPTIC EQUATIONS
to u(0) as ² → 0. To see this note that wn =
1
²(n−1)
¯
¯
Z
¯
¯
1
1
¯=
¯u(0) −
u
dσ
¯
¯
(n−1)
(n−1)
²
wn S(0,²)
²
wn
Z
u dσ so that
S(0,²)
¯Z
¯
¯
¯
S(0,²)
¯
¯
[u(0) − u(w)] dσ(w)¯¯
²→0
≤ max |u(0) − u(w)| −−→ 0.
w∈S(0,²)
Corollary 8.3.1. If u, Ω and r are as above, then
Z
Z
n
n
u(x) = n
u(z) dz =
u(x + rw) dw.
r wn B(x,r)
wn |w|<1
Proof. By the MVT (Theorem 8.3.1), for any 0 < ρ ≤ 1 we have the equation,
Z
1
u(x) =
u(x + rρw) dσ(w),
wn |w|=1
Multiplying both sides of this equation by ρn−1 dρ and integrating from 0 to 1 and setting
y = ρw, we obtain
Z 1Z
Z
u(x)
1
1
n−1
=
u(x + rρw) ρ dσ(w) dρ =
u(x + ry) dy.
n
wn 0 |w|=1
wn |y|<1
So we have
n
u(x) =
wn
Z
u(x + ry) dy.
|y|<1
Now let z = x + ry and we have
n
u(x) =
wn r n
Z
u(z) dz.
B(x,r)
Theorem 8.3.2 (Converse of Mean Value Theorem). Suppose that u is continuous on
an open set Ω and that whenever x ∈ Ω and B(x, r) ⊂ Ω then
Z
1
u(x) =
u(x + rw) dσ(w).
wn |w|=1
Then u ∈ C ∞ (Ω) and u is harmonic on Ω.
8.3. THE MAXIMUM PRINCIPLE AND ITS CONSEQUENCES
19
Proof. Choose ϕ ∈ C0∞ (B(0,
1)) (infinitely differentiable functions with compact support in
R
the unit ball) such that ϕ(x) dx = 1 and ϕ(x) = ψ(|x|) for some ψ ∈ C0∞ (R). Given ² > 0,
set
ϕ² (x) = ²−n ϕ(²−1 x) and set Ω² = {x : B(x, ²) ⊂ Ω}.
Then if x ∈ Ω² , the function y 7→ ϕ(x − y) is supported in Ω, and we have
Z
Z
Z
u(y)ϕ² (x − y) dy =
u(x − y)ϕ² (y) dy =
u(x − y)ϕ(²−1 y) ²−n dy
Rn
Rn
B(0,²)
Z
Z
u(x − ²y)ϕ(y) dy =
=
1
Z
u(x − ry)ψ(r)r(n−1) dσ(y)dr
0
B(0,1)
Z
=wn u(x)
S(0,1)
Z
1
ψ(r) r
(n−1)
1
Z
ϕ(ry) r(n−1) dσ(y) dr
dr = u(x)
0
0
S(0,1)
Z
=u(x)
ϕ(y) dy = u(x).
Rn
Since ϕ ∈ C0∞ we see from the first equality above that we can differentiate under the
first integral as often as we like. From this we see that, since
Z
u(x) =
u(y)ϕ² (x − y) dy,
Rn
then u ∈ C ∞ (Ω² ). Since ² is aribitrary we see that u ∈ C ∞ (Ω).
Now we note that for x ∈ Ω² , the mean value of u on S(x, r) is independent of r < ², so
using the substitution z = rw and the first Green’s identity (8.1.4) with v = 1, we have
Z
Z
d
0=
u(x + rw) dσ(w) =
w · ∇u(x + rw) dσ(w)
dr S(0,r)
S(0,1)
Z
=
¡
¢
r−1 z · ∇u(x + z) r(1−n) dσ(z)
S(0,r)
Z
=r
(1−n)
S(x,r)
∂u
(z) dσ(z) = r(1−n)
∂n
Z
∆u(y) dy.
B(x,r)
Now since the integral of ∆u over any ball in Ω is zero we conclue that ∆u = 0.
Corollary 8.3.2. If u is harmonic on Ω, then u ∈ C ∞ (Ω).
20
CHAPTER 8. ELLIPTIC EQUATIONS
Proof. Just apply the Mean Value Theorem, Theorem 8.3.1 and the converse, Theorem
8.3.2.
Theorem 8.3.3 (Maximum Principle). Suppose Ω is a connected open set in Rn . If u is
harmonic and real-valued on Ω and sup u(x) = A < ∞, then either u(x) < A for all x ∈ Ω
or u(x) = A for all x ∈ Ω.
x∈Ω
Proof. As the inverse image of a closed set {A} by a continuous function u, the set
S = u−1 (A) = {x ∈ Ω : u(x) = A}
is closed in Ω. But by the Mean Value Theorem, if u(x) = A then u(y) must equal A for all
y in a ball about x (otherwise the mean value on the spheres about x would be less than A),
so the set S is also open. Now a well known result from point set topology is that the only
subset of a connected open set that is both open and closed is either ∅ or Ω.
Remark 8.3.1. We should make a few comments concerning the topological notions of
connectedness, path-connectedness and conclusion drawn in the proof of Theorem 8.3.3.
Definition 8.3.1. A topological space Y is connected if it is not the union of two nonempty
disjoint open sets. A subset B ⊂ Y is connected if it is connected as a subspace of Y .
Theorem 8.3.4. If Y is connected then the only subsets that are both open and closed are
∅ and Y .
Proof. If G ⊂ Y is both open and closed, and G 6= ∅, and G 6= Y , then Y = G ∪ Gc where G
and Gc (the complement of G) are disjoint open sets. This contradicts the assumption that
Y is connected.
Generally, at least in analysis, when one thinks of connectedness one thinks of pathconnectedness.
Definition 8.3.2. A topological space Y is path-connected if each pair of points can be joined
by a path in Y . A path is a continuous mapping f : I → Y where I is the unit interval.
Theorem 8.3.5. If Y is path-connected then it is connected. But a connected space need
not be path-connected. In Rn an open set is connected if and only if it is path-connected.
For a proof of this result see any elementary book on point set topology.
Corollary 8.3.3. Suppose that Ω is bounded. If u is harmonic on Ω and continuous on Ω,
then max u(x) is achieved on the boundary of Ω.
x∈Ω
8.3. THE MAXIMUM PRINCIPLE AND ITS CONSEQUENCES
21
Proof. The maximum is achieved somewhere since u is a continuous function on a compact
set. If the maximum is acheieved at an interior point then by the Maximum Principle
(Theorem 8.3.3) u must be a constant on the connected component containing this point
which contains some of the boundary of Ω. Thus u achieves its maximum on the boundary.
Theorem 8.3.6 (The Uniqueness Theorem). Suppose that Ω is bounded. If u1 and u2
are harmonic on Ω, continuous on Ω and such that u1 = u2 on the boundary of Ω, then
u1 = u2 on Ω.
Proof. The real and imaginary parts of (u1 − u2 ) and (u2 − u1 ) are harmonic on Ω, and
therefore must achieve their maximum on ∂Ω. Since these functions agree on the boundary
these maximums must both be zero. So we have u1 = u2 in Ω.
Definition 8.3.3. A function u ∈ C 2 (Ω) is called subharmonic if ∆u ≥ 0 and u ∈ C 2 (Ω) is
called superharmonic if ∆u ≤ 0.
Theorem 8.3.7. Let Ω be a bounded domain and let
m = min{u(x) : x ∈ ∂Ω},
M = max{u(x) : x ∈ ∂Ω}.
i) (weak maximum principle) m ≤ u(x) ≤ M for all x ∈ Ω.
ii) (strong maximum principle) Either
a) m < u(x) < M for all x ∈ Ω, or else,
b) m = u(x) = M for all x ∈ Ω.
iii) If ∆u(x) ≥ 0 in Ω, then u(x) ≤ M for all x ∈ Ω.
iv) If ∆u(x) ≤ 0 in Ω, then u(x) ≥ m for all x ∈ Ω.
Proof. In the first assertion we need only show that m ≤ u but this follows by applying the
maximum principle to v = −u which satisfies v ≤ −m and therefore −u ≤ −m or m ≤ u.
We prove only the case of a subharmonic function, i.e., we assume that ∆u ≥ 0 and
assume that M = max{u(x) : x ∈ ∂Ω}, and we also only show that u ≤ M on Ω. Since
Ω is a bounded domain we can enclose it in a ball of some radius R centered at the origin
(Ω ⊂ B(0, R)). Let ² > 0 be arbitrary and define
v(x) = u(x) + ²|x|2 , x ∈ Ω.
Setting |x| = r and writing the Laplace operator in spherical coordinates we have ∆(r2 ) = 2n.
Thus we have ∆v = ∆u + 2n² > 0 in Ω. From this we can conclude that v can only achieve
22
CHAPTER 8. ELLIPTIC EQUATIONS
its maximum on Ω only on the boundary of Ω, since at an interior maximum we would have
to have vxj xj ≤ 0 for all j (by the second derivative test from calculus) and thus ∆v ≤ 0.
Now since u ≤ M on ∂Ω we have v ≤ M + ²R2 on ∂Ω and since (as a continuous function on
a compact set) v must achieve its maximum on ∂Ω we must have v ≤ M + ²R2 on Ω. Now
u ≤ v so we have u ≤ M + ²R2 on Ω and this is true for every ² so we have u ≤ M on Ω.
Remark 8.3.2. If the domain Ω is unbounded, then the maximum principle need not hold.
In fact u(x, y) = ex sin(y) is harmonic in Ω = {(x, y) ∈ R2 : x ∈ R, −π < y < π and u is
zero on the boundary, so m = M = 0 but u is not identically zero.
Theorem 8.3.8 (Liouville’s Theorem). A function which is bounded and harmonic on
Rn must be a constant.
Proof. For any x ∈ Rn and |x| < R, we have by Theorem 8.3.1, that
¯
¯
¯ Z
¯
Z
Z
¯
n
n ¯¯
¯
|u(x) − u(0)| = n ¯
u(y) dy −
u(y) dy ¯ ≤ n
sup |u(y)|
dy,
¯ R wn y∈Rn
R wn ¯
¯B(x,R)
¯
D
B(0,R)
where
£
¤ £
¤
D = B(x, R) ∩ B(0, R)c ∪ B(0, R) ∩ B(x, R)c
is the symmetric difference of B(x, R) and B(0, R). Note that
e
D ⊂ {y : (R − |x|) < |y| < (R + |x|)} ≡ D,
R
O
R1
x
R
R2
e where R1 = R − |x| and R2 = R + |x|
Plot of D
8.3. THE MAXIMUM PRINCIPLE AND ITS CONSEQUENCES
and so
n
|u(x) − u(0)| = n
sup |u(y)|
R wn y∈Rn
=
n
sup |u(y)|
Rn y∈Rn
= sup |u(y)|
y∈Rn
23
Z
dy
e
D
(R+|x|)
Z
rn−1 dr
(R−|x|)
n
(R + |x|) − (R − |x|)n R→∞
−−−→ 0.
Rn
Therefore we have u(x) = u(0) for every x.
Lemma 8.3.1.
Z
P (x, y) dσy
1=
(∗)
S(0,R)
Proof. Let us consider the Dirichlet problem
∆u(x) = 0, x ∈ B(0, R),
u(x) = g(x) = 1,
x ∈ S(0, R).
By the Maximum Principle the unique solution if u ≡ 1. Since this solution is C 2 (B(0, R))
we know from (8.2.8), (8.2.9) that it must satisfy
Z
1=
P (x, y)g(x) dσy
S(0,R)
and the result (∗) follows.
Theorem 8.3.9. Suppose that f ∈ C(S(0, R)) in Rn . Then the function
R
P (x, y)f (y), dσy ,
x ∈ B(0, R)
S(0,R)
u(x) =
f (x), x ∈ S(0, R)
is harmonic in B(0, R) and continuous on B(0, R). Hence u(x) is the unique solution in
C 2 (B(0, R)) ∩ C(B(0, R)) that satisfies
∆u(x) = 0,
u(x) = f (x)
x ∈ B(0, R)
x ∈ S(0, R).
24
CHAPTER 8. ELLIPTIC EQUATIONS
Proof. We carry out the proof for n = 3. In this case the Possion kernel is
P (x, y) =
R2 − |x|2
1
.
4πR
|x − y|3
Recall that P = −∂G/∂ny and hence for y ∈ S(0, R) we have
∆x P (x, y) = −
∂
(∆x G(x, y)) = 0.
∂n
For x ∈ B(0, R), repeated differentiation under the integral is permissible since the
derivatives of P (x, y) are continuous for y ∈ S(0, R). Hence
Z
∆u(x) =
∆x P (x, y) f (y) dσy = 0,
S(0,R)
and u ∈ C 2 (B(0, R)) (in fact C ∞ (B(0, R))). We need only show that
x0 ∈ S(0, R).
lim u(x) = f (x0 ),
x→x0
Using (∗) we can write
Z
f (x0 ) =
P (x, y)f (x0 ) dσy ,
S(0,R)
and it suffices to prove
lim
Z
x→x0
S(0,R)
£
¤
P (x, y) f (y) − f (x0 ) dσy = 0,
x0 ∈ S(0, R).
Since f is continuous, given ² > 0 there exists a δ such that
|f (y) − f (x0 )| < ²,
if |y − x0 | < δ
and there exists M such that
|f (y)| ≤ M,
y ∈ S(0, R).
Let C(x0 , δ) = S(0, R) ∩ B(x0 , δ) and C c (x0 , δ) = S(0, R)\C(x0 , δ) and write
Z
Z
£
¤
£
¤
P (x, y) f (y) − f (x0 ) dσy =
P (x, y) f (y) − f (x0 ) dσy
S(0,R)
C(x0 ,δ)
Z
+
C c (x0 ,δ)
£
¤
P (x, y) f (y) − f (x0 ) dσy .
8.3. THE MAXIMUM PRINCIPLE AND ITS CONSEQUENCES
We have
Z
£
¤
P (x, y) f (y) − f (x0 ) dσy ≤ ²
C(x0 ,δ)
and
Z
25
Z
P (x, y) dσy < ²,
C(x0 ,δ)
£
¤
P (x, y) f (y) − f (x0 ) dσy ≤ 2M
C c (x0 ,δ)
Z
P (x, y) dσy .
C c (x0 ,δ)
The proof will be complete if we can show that
Z
lim
P (x, y) dσy = 0.
x→x0
C c (x0 ,δ)
|y − x0|
δ/2
x0
δ
x
C(x0 , δ)
y
|x − x0 |
|y − x|
Plot of C(x0 , δ)
Since we are only concerned with points x near x0 , we consider x ∈ B(x0 , δ/2) and
y ∈ C c (x0 , δ) as depicted in the figure. In this case we have
|y − x| = |(y − x0 ) − (x − x0 )|
≥ |y − x0 | − |x − x0 |
≥ δ − δ/2 = δ/2
and then
P (x, y) =
1 (R2 − |x|2 )
8 (R2 − |x|2 )
≤
.
4πR |x − y|3
4πR
δ
Thus for |x − x0 | < δ/2, we have
Z
P (x, y) dσy ≤
8R 2
(R − |x|2 ).
3
δ
C c (x0 ,δ)
As x → x0 we have |x| → R and the right hand side tends to zero and the proof is complete.
26
8.4
CHAPTER 8. ELLIPTIC EQUATIONS
Separation of Variables
Example 8.4.1 (Dirichlet Problem for B(0, R) ⊂ R2 ). We first reconsider the Dirichlet problem for B(0, R) ⊂ R2 . In polar coordinates with 0 ≤ r ≤ R, −π ≤ θ ≤ π and
1
1
∆u = urr + ur + 2 uθθ = 0
r
r
u(R, θ) = f (θ).
We seek u(r, θ) = Θ(θ)R(r). Then as we saw in Section 8.1.1
Θ00 + µΘ = 0,
(8.4.1)
r2 R00 + rR0 − µR = 0.
(8.4.2)
and
Since we require Θ(θ) = Θ(θ + 2π), we solve the first of these equations subject to the
boundary conditions
Θ(−π) = Θ(π).
(8.4.3)
The eigenvalues for (8.4.1), (8.4.3) are given by
µn = n2 ,
n = 0, 1, 2, · · · ,
and the associated eigenfunctions are
Θn (θ) = Cn cos(nθ) + Dn sin(nθ).
The solutions of (8.4.2) are
(
Rn (r) =
A0 + B0 ln(r),
An rn + Bn r−n ,
n=0
n = 1, 2, · · ·
.
We want a harmonic functions in B(0, R) and so we take Bn = 0 for n = 0, 1, 2, · · · . Thus
we seek u in the form
∞
a0 X ³ r ´n
u(r, θ) =
+
(an cos(nθ) + bn sin(nθ)) .
2
R
n=1
We need
a0 X
f (θ) = u(R, θ) =
(an cos(nθ) + bn sin(nθ)) ,
+
2
n=1
∞
8.4. SEPARATION OF VARIABLES
27
and
1
an =
π
1
bn =
π
Z
π
f (θ) cos(nθ) dθ,
−π
Z
π
f (θ) sin(nθ) dθ.
−π
Lemma 8.4.1. The series solution can thus be written as
1
u(r, θ) =
2π
Z
2π
0
(R2 − r2 ) f (θ)
dϕ.
R2 + r2 − 2rR cos(θ − ϕ)
Proof. To prove this result we need only insert the formulas for an and bn into the infinite
sum representation for the solution, interchange the sum and integral and sum a resulting
geometric series:
1
u(r, θ) =
2π
1
=
2π
1
=
2π
1
=
2π
1
=
2π
1
=
2π
Z
∞
1 X ³ r ´n π
f (α) dα +
f (α) [cos(nα) cos(nθ) + sin(nα) sin(nθ)] dα
π n=1 R
−π
−π
Z
π
Z
π
Z
π
Z
∞
1 X ³ r ´n π
f (α) dα +
f (α) cos[n(θ − α)] dα
π n=1 R
−π
−π
"
f (α) 1 + 2
−π
Z
n=1
"
π
f (α) 1 +
−π
Z
π
−π
R
#
cos[n(θ − α)] dα
#
ª
ein(θ−α) + e−in(θ−α)
dα
½
f (α)
Z
R
∞ ³ ´
X
r n©
n=1
π
−π
∞ ³ ´
X
r n
rein(θ−α)
re−in(θ−α)
1+
+
R − rein(θ−α) R − re−in(θ−α)
¾
dα
(R2 − r2 )
f (α) dα.
(R2 + r2 − 2rR cos(θ − α))
Example 8.4.2 (Dirichlet Problem for a Square). We use the method of separation of
28
CHAPTER 8. ELLIPTIC EQUATIONS
variables to solve the Dirichlet Problem
∆u = 0,
0 ≤ x ≤ π, 0 ≤ y ≤ a,
u(0, y) = 0, u(π, y) = 0, 0 ≤ y ≤ a,
u(x, 0) = f (x),
u(x, a) = 0.
We seek simple solutions of Laplace’s equation in the form u(x, y) = X(x)Y (y) which leads
to
X 00
Y 00
=−
= −λ,
X
Y
and thus we obtain
X 00 + λX = 0
X(0) = X(π) = 0.
We have a nontrivial solution if
λn = n 2 ,
Xn (x) = cn sin(nx),
n = 1, 2, · · · .
For Y (y) we have
Y 00 − n2 Y = 0
Y (a) = 0.
sinh[n(a − y)]
. We must still satisfy the boundsinh(na)
ary condition at y = 0 and we seek a formal solution in the
Thus, for convienence, we can take Yn (y) =
u(x, y) =
∞
X
n=1
cn
sinh[n(a − y)]
sin(nx)
sinh(na)
and
f (x) = u(x, 0) =
∞
X
cn sin(nx)
(∗)
n=1
Z
2 π
f (x) sin(nx) dx.
cn =
π 0
We still need to show that this formal solution is actually a solution. To this end we
quote a theorem from advanced calculus concerning the convergence of a series of products.
Either of the following two results can be used to do the proof. The first is due to Dirichlet
and the second is usually referred to as Abel’s Theorem.
from which we know that
8.4. SEPARATION OF VARIABLES
Theorem 8.4.1 (Dirichlet’s Test). Let
29
∞
X
an be a series with bounded partial sums. Let
n=1
{bn } be a monotonic sequence converging to zero. Then the series
∞
X
an bn converges.
n=1
Proof. Let An = a1 +a2 +· · ·+an and assume that An | ≤ M for all n. Then lim An bn+1 = 0,
n→∞
then by the summation by parts formula
n
X
an bn = An bn+1 −
n=1
n
X
Ak (bk+1 − bk ),
k=1
to show the series converges we need only show that
terms bn are decreasing we have
P
Ak (bk+1 − bk ) converges. Since the
|Ak (bk+1 − bk )| ≤ M (bk − bk+1 ).
P
But the series (bk+1 − bk ) is a convergent
P telescoping series. Thus by the comparison test
we obtain absolute convergence of series
Ak (bk+1 − bk ).
Theorem 8.4.2 (Abel’s Theorem). The series
{bn } is a monotonic convergent sequence.
Proof. The convergence of
∞
X
∞
X
n=1
an bn converges if
∞
X
an converges and
n=1
an bn and {bn } proves the convergence of An bn+1 where, as
n=1
above, An = a1 + a2 + · · · + an . Also, {An } is a bounded sequence. The remainder of the
proof goes like the proof of Theorem 8.4.1.
As a consequence of Abel’s Theorem, we state without proof, a result which directly
yields our desired result.
Theorem 8.4.3. The series
∞
X
Xn (x)Yn (y) converges uniformly in a set I × J in the plane
n=1
provided
P
1.
Xn (x) converges uniformly for x ∈ I.
2. The sequence {Yn (y)} is uniformly bounded and convergent for y ∈ J and monotonic
with respect to n for all y ∈ J.
30
CHAPTER 8. ELLIPTIC EQUATIONS
In our case we note that if f (0) = f (π) = 0 (which should be true by continuity) and f
is continuous and piecewise smooth, then by our earlier result from Chapter 7, we know that
the series (∗) for f converges for every x. So the first condition of Theorem 8.4.3 is satisfied.
Next we note that
en(a−y) − e−n(a−y)
Yn (y) =
ena − e−na
= e−ny
≤
1 − e−2n(a−y)
1 − e−2na
e−ny
e−ny
≤
.
1 − e−2na
1 − e−2a
By this esitmate we have
1
1 − e−2a
which gives uniform boundedness and, for each y
Yn (y) ≤
en(a−y) − e−n(a−y)
ena − e−na
is a monotonic convergent sequence in n for each y. Thus the socond condition in Theorem
8.4.3 is satisfied.
Clearly u(0, y) = u(π, y) = 0 and u(x, a) = 0. We also note that for ux , uxx , uy , uyy the
series of differentiated terms are dominated by
Yn (y) =
C
∞
X
n2 e−ny
n=1
and so term-by-term differentiation is justified and we see that u is the solution to our
Dirichlet Problem.
8.5
Poisson’s Equation
The Poisson problem is to find a function u satisfying
∆w(x) = −f (x),
x ∈ Ω.
(8.5.1)
This is often refered to as Poisson’s equation. Our objective here is to show that under
certain assumptions on f , the solution of (8.5.1) can be expressed in terms of the fundamental
solution K(x, y) given in (8.2.1) by
Z
w(x) =
K(x, y) f (y) dy.
(8.5.2)
Ω
8.5. POISSON’S EQUATION
31
Indeed, let us collect some facts, some of which we will not be able to prove at this time
but it is handy to have them written in one place. Consider the problem
∆u(x) = f (x), x ∈ Ω,
u(x) = g(x) x ∈ ∂Ω.
(8.5.3)
The Green’s function for this problem is G(x, y) = K(x, y) − w(x, y) where
∆w(x) = 0, x ∈ Ω,
w(x) = K(x) x ∈ ∂Ω.
(8.5.4)
we need only solve the standard Dirichlet Problem
∆v = 0, x ∈ Ω,
v(x) = ϕ(x) x ∈ ∂Ω,
Theorem 8.5.1. The solution of (8.5.3) is given by
Z
Z
∂G
u(x) =
G(x, y)f (y) dy +
g(ξ)
(x, ξ) dσ(ξ),
∂n
Ω
∂Ω
(8.5.5)
∂G
(x, ξ) = n · ∇ξ G(x, ξ).
∂n
Just as with many problems we have studied, spectral theory plays an important role here.
In fact it can be shown that the Green’s function can be given in terms of the eigenvlaues
and eigenfunctions of the Laplacian on Ω as given in the following theorem.
where
Theorem 8.5.2. If Ω is a bounded domain, the Green;s function has the eigenfunction
expansion
∞
X
uj (x) uj (y)
G(x, y) =
λj
j=1
where ∆uj + λj uj = 0 in Ω and uj = 0 on ∂Ω.
The whole problem of constructing Green’s functions for given domains is quite difficult.
There are some notable examples. For example, in the special case of n = 2 we can use
results from the theory of analytic functions to obtain the Green’s function.
Theorem 8.5.3.
1. Let w = F (z) be an analytic function which maps the region Ω in
the z-plane onto the upper half plane in the w-plane, with F 0 (z) 6= 0 in Ω. Then, if
z = x + iy and ζ = ξ + iη are any two points in Ω, the Green’s function for the domain
Ω in R2 is given by
¯
¯
¯
¯
1
¯ F (z) − F (ζ) ¯
G((x, y), (ξ, η)) =
log ¯
¯.
¯ F (z) − F (ζ) ¯
2π
32
CHAPTER 8. ELLIPTIC EQUATIONS
2. Let w = f (z) be an analytic function which maps the region Ω in the z-plane onto the
unit disk in the w-plane (for simply connected domains Ω such a function always exists
by the Reimann Mapping Theorem). Then the Green’s function for the domain Ω in
R2 is given by
¯
¯
1
log ¯f (z)¯.
G((x, y), (ξ, η)) =
2π
We now return to a detailed treatment of the Poisson Problem.
Definition 8.5.1. Let f be defined on a neighborhood U ⊂ Rn of x0 and left 0 < α ≤ 1.
We say that f is Hölder continuous at x0 with exponent α if
[f ]α,x0 ≡ sup
x∈U
x6=x0
|f (x) − f (x0 )|
< ∞.
|x − x0 |α
Note that [f ]α,x0 depends on U . The function f is said to be Hölder continuous in Ω with
exponent α if
|f (x) − f (y)|
sup
< ∞.
|x − y|α
x∈Ω
x6=y
f is called locally Hölder continuous in Ω if it is Hölder continuous on compact subsets of Ω.
Note that if α1 ≤ α2 then for x near x0
|f (x) − f (x0 )|
|f (x) − f (x0 )|
≤
.
α
1
|x − x0 |
|x − x0 |α2
Example 8.5.1. Let f (x) = |x|β , for x ∈ B(0, 1). Then
|f (x)|
= |x|β−α < ∞
|x|α
if α ≤ β.
Thus f is Hölder continuous of order α = β at x0 = 0.
If in Definition 8.5.1 we have α = 1 then we say that f is Lipschitz. It is easy to see that
if f is differentiable, then it is Lipschitz.
We will need the following estimate on K (n = 3):
!
µ
¶
¶
µ ¶Ã
µ
∂K
1
1 −1
2(xi − yi )
1 ∂
1 (xi − yi )
.
=
=
¡P
¢3/2 = −
∂xi
4π ∂xi |x − y|
4π
2
4π |x − y|3
(xi − yi )2
and also
¯
¯
¯ ∂
¯
C
¯
¯≤
K(x,
y)
¯ ∂xi
¯ |x − y|2 .
(8.5.6)
8.5. POISSON’S EQUATION
33
Furthermore,
∂2K
1
1
=−
∂xj ∂xi
4π |x − y|6
=−
µ
¶
3
δij |x − y| − (xi − yi )2|x − y|(xj − yj )
2
3
¢
¡
1
1
2
|x
−
y|
−
3(x
−
y
)(x
−
y
)
,
δ
ij
i
i
j
j
4π |x − y|5
and so
¢
∂2K
1
C
1 ¡
2
2
≤
+
3|x
−
y|
.
|x
−
y|
≤
5
∂xj ∂xi
4π |x − y|
|x − y|3
(8.5.7)
Theorem 8.5.4. Let f be bounded on a bounded domain Ω and let
Z
w(x) =
K(x, y) f (y) dy.
Ω
Then w ∈ C 1 (Ω) and for x ∈ Ω,
∂w
(x) =
∂xi
Proof. Define
Z
Ω
Z
v(x) =
Ω
∂K
(x, y) f (y) dy.
∂xi
∂K
(x, y) f (y) dy.
∂xi
Then v(x) is well defined since, by (8.5.6)
¯
¯
¯ ∂
¯
C
1
¯
¯≤
K(x,
y)
¯ ∂xi
¯ |x − y|2 ∈ L (Ω).
The proof of this result uses a standard tool in partial differential equations (and functional
analysis for that matter) referred to as mollification. Define the function η ∈ C 1 (R) satisfying
0 ≤ η(t) ≤ 1 and 0 ≤ η 0 (t) < 2 where
½
0, t ≤ 1
η(t) =
1, t ≥ 2.
With this we define the mollifier of w denoted w² by
µ
¶
Z
|y − x|
w² (x) =
K(x, y) η
f (y) dy.
²
Ω
Then w² ∈ C 1 (Ω) and we claim that w² → w uniformly (so, in particular, w ∈ C(Ω)) and
∂
we → v(x) uniformly (so v ∈ C(Ω)).
∂xi
34
CHAPTER 8. ELLIPTIC EQUATIONS
To prove the uniform convergence of these sequences we proceed as follows:
¯Z
¯
µ
µ
¶¶
¯
¯
|y
−
x|
|w² (x) − w(x)| = ¯¯ K(x, y) 1 − η
f (y) dy ¯¯
²
Ω
¯
µ
¶¯
Z
¯
¯
|y
−
x|
¯ dy
≤M
|K(x, y)| ¯¯1 − η
¯
²
Ω
¯
µ
¶¯
Z
1 ¯¯
|y − x| ¯¯
≤ C0
1−η
¯ dy
|x − y| ¯
²
|x−y|≤2²
Z
≤ 2C0
|x−y|≤2²
Z
≤ C1
2²
0
and
1
dy
|x − y|
1 2
ρ dρ = O(²).
ρ
¯
¯
¯
¯
¯ ¯¯ Z
µ
·
µ
¶¸¶
¯
¯
¯
∂K
|x − y|
∂
¯
¯v(x) − ∂w² (x)¯ = ¯¯
K(x, y)η
−
f (y) dy ¯
¯
¯
¯
¯
∂xi
∂xi ∂xi
²
¯ |x−y|≤2²
¯
µ
Z
≤ M0
|x−y|≤2²
1
1
+
2
|x − y|
|x − y|2
¯ µ
¶¯
¯
¯
¯η |x − y| ¯
¯
¯
²
¯
¯¶
2 ¯¯ (xi − yi ) ¯¯
+|K(x, y)| ¯
dy
² |x − y| ¯
Z
≤ M1
0
2²
µ
2
2
+
2
ρ
ρ²
¶
ρ2 dρ = M2 ² = O(²).
Now pick
x0 = (x01 , x02 , x03 , · · · , x0i , · · · , x0n ) ∈ Rn , x0 = (x01 , x02 , x03 , · · · , xi , · · · , x0n ).
Z
Then
w² (x) − w² (x0 ) =
x
x0
∂
w(s) ds
∂si
8.5. POISSON’S EQUATION
Since
35
∂w²
converges uniformly to v(s), and w² converges to w, we get that
∂si
Z x
∂
lim (w² (x) − w² (x0 )) =
lim
w(s) ds,
²→0
x0 ²→0 ∂si
Z
or
lim (w² (x) − w² (x0 )) =
²→0
x
v(s) ds.
x0
Since v is continuous we have
Z
∂w
∂K
(x) = v(x) =
(x − y) f (y) dy.
∂xi
Ω ∂xi
Theorem 8.5.5. Let f be bounded and locally Hölder continuous with exponent α, 0 < α ≤ 1,
in a bounded domain Ω. If
Z
w(x) =
K(x, y) f (y) dy,
Ω
then w ∈ C 2 (Ω) ∩ C 1 (Ω) and ∆w = −f . Moreover,
Z
∂2w
∂2
=
K(x − y)[f (y) − f (x)] dy
∂xi ∂xj
Ω0 ∂xi ∂xj
Z
− f (x)
∂Ω0
∂
K(x − y) nj (y) dσy ,
∂xi
where Ω ⊂ Ω0 and Ω0 is a normal domain where f = 0 on Ω0 \Ω.
Proof. Let us introduce the notation Di = ∂/∂xi , Dij = ∂ 2 /∂xi ∂xj and let
Z
Dij K(x, y)[f (y) − f (x)] dy
u(x) =
Ω0
Z
− f (x)
Di K(x, y)nj (y) dσy
∂Ω0
= I1 + I2 ,
where as usual n(y) denotes the unit normal vector to ∂Ω0 . When y is near x, say |x−y| < 1,
then
Z
1
|I1 | ≤ C0
|x − y|α dy
3
|x
−
y|
|y−x|<1
Z 1
Z 1
1
α−3 2
ρ ρ dρ = C1
≤C −1
dρ < ∞.
0
0 1−ρ
36
CHAPTER 8. ELLIPTIC EQUATIONS
Clearly the integral I2 is finite since |Di K(x − y)| ≤ C/|x − y|2 .
As in the previous proof we define v = Di w and
µ
¶
Z
|x − y|
v² =
Di K(x − y) η
f (y) dy.
²
Ω
Then v² ∈ C 1 (Ω) and (recall f = 0 on Ω0 \Ω.
µ
µ
¶¶
Z
|x − y|
Dj v² (x) =
Dj Di K(x, y)η
f (y) dy
²
Ω
Z
Z
¡
¢
Dj Di Kη [f (y) − f (x)] dy + f (x)
Dj (Di Kη) dy.
Ω0
Ω0
Pick ² so that B(x, 2²) ⊂ Ω and then for y ∈ ∂Ω, η(|x−y|/²) = 1 and applying the Divergence
Theorem,
Z
Z
Dj v² =
Dj (Di Kη)[f (y) − f (x)] dy − f (x)
Di Knj (y) dσy .
Ω0
Ω0
Thus for η < ²(x),
¯Z
¯
|u(x) − Dj v² (x)| = ¯¯
|y−x|<2δ
µ
½
µ
Dj Di K 1 − η
|x − y|
²
¶¶¾
¯
¯
[f (y) − f (x)] dy ¯¯ .
Let
[f ]B(x,2²) =
|f (y) − f (x)|/|x − y|α .
sup
y∈B(x,2²)
Then
µ
Z
|u(x) − Dj v² (x)| ≤ C0 [f ]B(x,2²)
|y−x|<2δ
Z
≤ C1 [f ]B(x,2²)
2δ
µ
−3
ρ
0
= C2 [f ]B(x,2²) O(δ α ),
¶
2
|Dij K| + |Di K| |y − x|α dy
²
2
+ ρ−2
²
¶
ρα ρ2 dρ
δ < ².
Pick z ∈ B(x, 2²) and γ so that B(z, γ) ⊂ B(x, 2²). Then
|u(z) − Dj vδ (z)| ≤ C[f ]B(x,2²) O(δ α ),
for all δ < ²/2.
8.5. POISSON’S EQUATION
37
Thus the last estimate on the previous page holds in a neighborhood of x. Now we claim
that the convergence of Dj vδ to u is uniform on compact sets. Indeed, if K is a compact set,
let {B(xi , ²(xi ))} be a finite cover and let
©
ª
M = max [f ]B(xi ,²(xi )) ,
² = min {²(xi )} .
Then for any y ∈ K,
|u(y) − Dj vδ (y)| < CM O(δ),
for all δ < ².
Thus Dj v² converges to u uniformly on compact subsets. Here for any x, there exists a neighborhood of x so that Dj v² → u uniformly and hence u is continuous on that neighborhood.
Therefore u is continuous on Ω. Now repeating the argument in the previous theorem, select
x0 ∈ Ω and write
Z x
v² (x) − v² (x0 ) =
Dj v² (ξ) dξ.
x0
So as ² → 0
Z
v(x) − v(x0 ) =
x
u(ξ) dξ
x0
and hence
Dj v(x) = u(x),
or
Dj Di w = u
and u ∈ C 2 (Ω).
It only remains to show ∆w = −f . In the formula for Dij w set i = j and let Ω0 = B(x, R)
for sufficiently large R. Note that the normal to Ω is
n(y) =
(y − x)
.
|y − x|
38
CHAPTER 8. ELLIPTIC EQUATIONS
Then by summing on i we have
∆w =
3
X
Dii w
i=1
Z
∆K(x, y) [f (y) − f (x)] dy
=
Ω0
Z
− f (x)
f (x)
=−
4π
f (x)
=−
4π
f (x)
−
4πR2
|y−x|=R
µ
¶ ¸
3 ·
1
1 X ∂
ni dσy
4π i=1 ∂xi |x − y|
¶µ
·µ
¶
3
X
(yi − xi )
2(xi − yi )
−1
Z
|y−x|=R i=1
Z
|y−x|=R
2
|x − y|3
|y − x|
¸
ni dσy
3
X
1
(yi − xi )2 dσy
|y − x|4 i=1
Z
|y−x|=R
dσy = −f (x).
Exercise Set 4: Elliptic Equations
1. Suppose that Ω is a normal domain in R2 with exterior unit normal ν. If u ∈ C 2 (Ω)
and ξ0 ∈ Ω, show that
Z
1
1
∂u
∂
1
log
u(x0 ) =
(x) − u(x) log
ds
2π ∂Ω
|x − x0 | ∂ν
∂ν
|x − x0 |
Z
1
1
−
log
∆u dx.
2π Ω
|x − x0 |
2. Let G(x, y) be the Green’s function for ∆u = 0.
(a) Show that G(x, y) = G(y, x).
(b) G(x, y) ≥ 0 .
3. Suppose u is harmonic in the ball B(x0 , R) ⊂ R2 . Prove that
8.5. POISSON’S EQUATION
(a) |u(x0 )| ≤
1
√
39
sZ
|u(x)|2 dx
R π
B(x0 ,R)
(b) If u is harmonic in R2 and not identically 0, show that
Z
u2 (x) dx
R2
does not exist.
4. Let Ω ⊂ B(0, R) ⊂ R2
a) Let ∆u = −F in Ω and suppose that F ≤ 0 in Ω. If in addition u ∈ C(Ω), then
max u(x) ≤ max u(x).
x∈Ω
x∈∂Ω
HINT: First assume that F < 0. Since u is continuous on Ω the max of u must
occur somewhere in Ω. Assume it occurs at (x0 , y0 ) ∈ Ω, i.e.,
u(x0 , y0 ) = max u(x).
x∈Ω
Since (x0 , y0 ) ∈ Ω,
and
¯
¯
ux ¯(x0 ,y0 ) = 0 = uy ¯(x0 ,y0 )
¯
uxx ¯(x0 ,y0 ) ≤ 0,
¯
uyy ¯(x0 ,y0 ) ≤ 0 (WHY?).
In the case F ≤ 0 let v = u + ²(x2 + y 2 ).
b) Consider the nonhomogeneous Dirichlet Problem
∆u = −F in Ω ⊂ B(0, R)
u = f in ∂Ω.
Show that
1
|u(x, y)| ≤ max |f (x, y)| + R2 max |F (x, y)|.
(x,y)∈∂Ω
4 (x,y)∈Ω
HINT: Use v = u +
1
max |F (x, y)| (x2 + y 2 ) to show that
4 (x,y)∈Ω
1
u ≤ max |f | + R2 max Ω|F |
∂Ω
4
and then consider −u.
40
CHAPTER 8. ELLIPTIC EQUATIONS
5. Prove that if u is harmonic in a bounded domain Ω ⊂ R2 and is C 2 (Ω), then |∇u|2
attains its maximum on ∂Ω.
6. For all n, let Ω = {x ∈ Rn : |x| > 1}. Then the ∂Ω = S(0, 1).
(a) Show that the exterior DP
∆u(x) = 0, x ∈ Ω,
u=1
has infinitely many solutions.
(b) If for n > 2 and we impose the condition that u(x) → 0 as |x| → ∞, then the
problem has a unique solution.
7. Show that the exterior DP (i.e., Ωc = C\Ω is a nonempty bounded domain.)
uxx + uyy = f ∈ Ω (unbounded),
u = g on ∂Ω,
|u(x, y)| ≤ A (x, y) ∈ Ω,
has at most one solution.
8. Do parts (a) and (b):
(a) Show that the Green’s function for the ball B(0, R) ⊂ R2 is given by
G(x, ξ) =
1
1
1
ln
−
ln
2π |x − ξ| 2π
R
¯
¯
2 ¯
¯
R
|ξ| ¯¯x − ξ 2 ¯¯
|ξ|
(b) If u(r, θ) ∈ C 2 (B(0, R)), B(0, R) ⊂ R2 solves the Dirichlet problem
show that
1
u(r, θ) =
2π
∆u = 0,
in B(0, R)
u = f (θ),
on S(0, R),
Z
0
2π
R2 − r 2
f (φ)dφ
R2 + r2 − 2Rr cos(φ − θ)
Bibliography
[1] R. Dautray and J.L. Lions, Mathematical analysis and numerical methods for science
and technology,
[2] G. Folland, Introduction to partial differential equations,
[3] G. Folland, Fourier Series and its Applications, Brooks-Cole Publ. Co., 1992.
[4] A. Friedman, Generalized functions and partial differential equations,
[5] A. Friedman, Partial differential equations,
[6] K.E. Gustafson Partial differential equations,
[7] P.R. Garabedian, Partial Differential Equations, New York, John Wiley & Sons, 1964.
[8] R.B. Guenther and J.W. Lee, Partial Differential Equations of Mathematical Physics
and Integral Equations, (Prentice Hall 1988), (Dover 1996).
[9] I.M. Gel’fand and G.E. Shilov, Generalized functions, v. 1,
[10] G. Hellwig, Partial differential equations, New York, Blaisdell Publ. Co. 1964.
[11] L. Hörmander, Linear partial differential operators,
[12] F. John, Partial differential equations,
[13] J. Kevorkian, Partial differential equations,
[14] P. Lax, Hyperbolic systems of conservation laws and the mathematical theory of shocks,
[15] I.G. Petrovsky, Lectures on partial differential equations, Philadelphia, W.B. Saunders
Co. 1967.
[16] M. Pinsky, Introduction to partial differential equations with applications,
[17] W. Rudin, Functional analysis,
41
42
BIBLIOGRAPHY
[18] F. Treves, Basic Partial Differential Equations, New York, Academic Press, 1975.
[19] F. Treves, Linear Partial Differential Equations with Constant Coefficients, New York,
Gordon & Breach, 1966.
[20] K. Yosida, Functional analysis,
[21] Generalized functions in mathematical physics, V.S. Vladimirov
[22] H.F. Weinberger, Partial differential equations, Waltham, Mass., Blaisdel Publ. Co.,
1965.
[23] E.C. Zachmanoglou and D.W. Thoe, Introduction to partial differential equations with
applications,
[24] A.H. Zemanian, Distribution theory and transform analysis,