Offshore Drilling and Production Equipment
advertisement

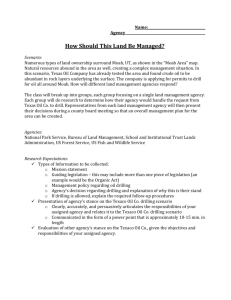
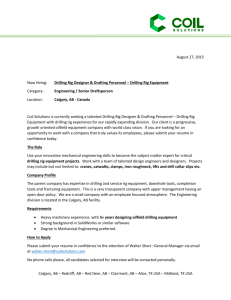
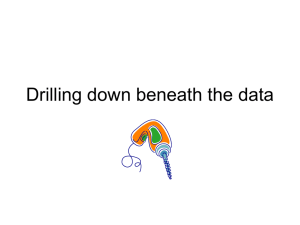
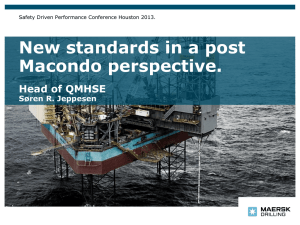
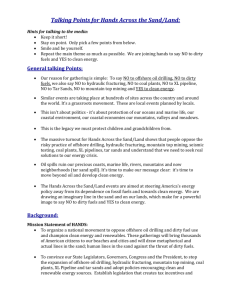
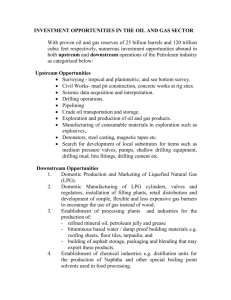
CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa OFFSHORE DRILLING AND PRODUCTION EQUIPMENT S. Tanaka Professor Emeritus, The University of Tokyo, Tokyo, Japan Y. Okada General Manager, Japan Oil Engineering Co., Ltd., Tokyo, Japan Y. Ichikawa General Manager, Japan Drilling Co., Ltd., Tokyo, Japan E SA SC M O PL -E E O C LS H AP S TE R Keywords: Offshore, rotary drilling, offshore drilling rig, jack-up, semisubmersible, drillship, offshore oil and gas production, platform, FPSO, subsea production systems. Contents 1. Introduction 2. Outline of Rotary Drilling Method 3. Offshore Drilling Structures and Equipments 4. Offshore Oil/Gas Production Systems Glossary Bibliography Biographical Sketches To cite this chapter Summary N World consumption of primary energy in 1999 was estimated at 8533.6 million tons oil equivalent. Oil and natural gas accounted for about 65% of the world energy supply. Offshore areas produced 20-30 % of the oil and gas supply. U Oil and natural gas are brought to the surface from underground reservoirs through wells that have been drilled and completed to produce these fluids safely and economically. Fundamental technology of drilling, completion and production of oil and gas is common to onshore and offshore areas. But environmental conditions of a field affect facilities and engineering works of the field. This chapter covers the basics of rotary drilling technology, recent progress of drilling engineering, characteristics of various offshore drilling rigs, and types of offshore production systems. The offshore production system adopted to develop a field extends its influence on the drilling and completion method of the field. 1. Introduction The chapter describes mainly the present situation of offshore drilling and production of oil and natural gas. The first section is devoted for an outline of the rotary drilling method, as oil and gas wells onshore and offshore are drilled by the method. A hole made by a drilling bit is called a well. The objective of making the well is to ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa produce underground fluids such as fresh water, brine, crude oil, natural gas and geothermal fluids, and to study properties of deeply situated formations. The Middle East area and China are said to have had wells producing water or natural gas even in the era before Christ. By the year 1200, wells 450 m deep were drilled in China by a spring-pole drilling method. The principle of the method is to generate percussion by dropping heavy tools on the bottom of the hole. The spring-pole drilling method was the predecessor of a cable drilling method that had been used till after 1970s. E SA SC M O PL -E E O C LS H AP S TE R Hand-powered rotary devices were introduced to make geothermal wells in Italy and water wells in France in early 1800s. Machine-powered rotary devices and circulation systems were introduced by the late 1850’s. In 1901, the Lucas gusher at Spindletop oil field, the United States of America, was successfully drilled and completed by the rotary drilling method with circulation of fluid that consisted of water and clay. The first cementing job to shut off water was carried out in 1903. The use of bentonite as an ingredient of drilling fluid began in 1935 and has contributed to improve mud properties. Three-cutter rock bits equipped with jet nozzles were introduced to clean the bottom-hole of cuttings around 1950. The technology of directional drilling has made great progress to the level of extended reach drilling (ERD) and horizontal wells through the development of down-hole mud motors and measurement-while-drilling tools (MWD). Over-water drilling from a pier extended from seashore was carried out in the late 1890’s. Drilling and production of oil in the location where the land was out of sight was accomplished offshore Louisiana, the United States of America, in 6 m of water in 1947. The well was drilled from a tender-assisted platform system. U N Four basic types of mobile offshore drilling rigs were developed not long after drilling the first offshore well: the submersible rig in 1949, the ship-shaped rig in 1953, the jack-up rig in 1954, and the semisubmersible rig in 1962. Drill ships and semisubmersible rigs are called floaters. These structures float during operations. Floaters are equipped with unique facilities that are not used in onshore operations: the marine riser, the motion compensation, and the stationkeeping system. The dynamic positioning system (DPS) was introduced for deep-sea operations in 1961. The scientific research well “SG-3” in Russia reached the depth of 12 263 m in 1988, and has had the depth record ever since. The deepest exploration drilling for hydrocarbons was carried out to the depth of 9583 m in the United States of America in 1974. As for offshore wells, a hydrocarbon exploration well was drilled offshore Brazil in 2965 m of water in 2001. A production well was completed with a subsea completion system offshore Brazil in 1852 m of water in 1998. The offshore technology is steadily in progress toward deeper and deeper seas to search and produce subsea resources for the future welfare of the world. 2. Outline of Rotary Drilling Method The rotary drilling method is usually applied to make deep wells. In the rotary drilling a bit breaks down rocks at the bottom of the hole by scraping and crushing actions. The bit ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa E SA SC M O PL -E E O C LS H AP S TE R is rotated through a drill stem by a rotary table on a rig floor. Figure 1: Diagrammatic View of Rotary Drilling Rig (Modified from Rabia H. (1985). Oilwell Drilling Engineering, Principles and Practice, Graham & Trotman) U N A diagrammatic view of the rotary drilling rig is shown in Figure 1. The left side of the figure shows main surface equipment. The substructure indicated by 3 is constructed on the ground as the foundation to support the derrick floor G on which the derrick 1, rotary table H, and drawworks M are placed. The monkey board (or platform) 2 is a working floor to handle pipes. The heavy materials such as the drill stem and casing are lowered into or lifted up from the hole by a hoisting system composed of the drawworks M, drilling line 4, crown block A, traveling block B, and the hook C. A circulation system of drilling fluid consists of the suction pits P, pumps Q, surface piping, standpipe, rotary hose (or kelly hose) F, and swivel D which is connected to the kelly E, and directed lines show the flow path of the drilling fluid. In the figure main power sources are the diesel engines N, and the power is transmitted to the rotary table, drawworks and pumps by the main transmission system O. The rotary table is driven by the drive J. Sometimes electric motors are used to drive the relevant machines. A driller controls the machines from the console by the drawworks and conducts the drilling operations. In the right side of the Figure 1 showing the cross-section of the derrick floor R and the hole, blowout preventers (BOPs) S and T are mounted on the top of the wellhead ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa connected to the surface casing V. It is the primary function of the BOPs to safely confine fluids suddenly entering into the hole out of formations , and to bleed them off from the hole through the outlets U in a controlled manner. The drill stem is composed of the kelly E, the drill pipe X, and drill collars Y. The bit Z is attached at the lower end of the drill collars. The components of the drill stem are made of steel pipes. The drilling fluid is circulated down to the bit through the drill stem, and up to the surface through the annular space between the drill stem and the borehole or casing. The drilling fluid returned to the surface flows into the return line L, and then to the shale shaker K to separate cuttings and fluid. The fluid falls into the suction pit P to be circulated again E SA SC M O PL -E E O C LS H AP S TE R The casing consists of lengths of steel pipe being joined to another. A number of strings of casing are set in the well. The purposes of casing are to protect fresh-water sands, to prevent drilling problems such as heaving formations and high-pressure zones, and finally to provide a means of production of oil and gas if the well is productive. The annular space between the casing and the borehole should be filled with cement W to support the casing and prevent the flow of underground fluids up to the surface and/or into the fresh-water zones. Conductor casing is the largest-diameter casing used to protect the surface soils. The next smaller-diameter casing is the surface casing V. Its main function is to protect fresh-water zones. Intermediate strings of casing are set to case the long open section of the hole or the zones causing trouble. The last string of casing is the production casing that is set immediately above, or through, the production formations The main functions of the rotary drilling rig are as follows: U N Penetrating operations. The bit breaks down rock at the bottom-hole by the rotation under the weight. The rotating force of the rotary table is transmitted through the drill stem to the bit. Some portion of the weight of drill collars is applied to the bit as the bit weight to push the bit against the rock. Hoisting operations. The drill stem with the bit is lowered and lifted by the hoisting system. The casing is also handled by the hoisting system. Conditioning and circulating the drilling fluids by the circulation system. Preventing the formation fluids from entering into the wellbore and controlling them. The International Association of Drilling Contractors (IADC) classifies the bits used in the rotary drilling as follows: Roller bits (or roller-cone bits). Steel tooth bits. Insert bits (or tungsten carbide insert bits). (b) Fixed cutter drill bits. PDC bits (PDC: polycrystalline diamond compacts) TSP bits (TSP: thermally stable polycrystalline) Natural diamond bits ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa E SA SC M O PL -E E O C LS H AP S TE R Three types of bits are shown in Figure 2. U N Figure 2: Three Types of Bits Used in Rotary Drilling A: steel tooth bit, B: insert bit, and C: fishtail PDC bit. (From Drill Bit Catalog © 1995 – Hughes Christensen Reproduced Courtesy of Hughes Christensen Company) The IADC bit classification system provides conventional methods for categorizing roller bits by three digits, and fixed cutter drill bits by four characters. The choice of bits depends upon properties of the formations, and drilling techniques (see Drilling Machines). The drilling fluids, conventionally simply called as muds, have lots of important functions in the rotary drilling. Main functions are as follows: Removal of cuttings from the bottom of the hole to the surface. Cuttings are separated from the mud at the shale shaker. These cuttings and samples of the mud are analyzed to study geological properties of the rocks penetrated, and to find out the indication of oil and gas in the formations. Controlling hydraulic pressure in the hole by adjusting the density of the mud to prevent collapse of the wall of the borehole, and to contain formation fluids in the formations. ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Cooling and lubricating the bit and the drill stem. The drilling fluids are composed of base fluids, clay minerals, chemicals, and inert solids. Their base fluids classify them as follows: water-base muds, oil-base muds, air or gas drilling. Bentonite, a kind of clay, is preferred to make up water-base muds. A small quantity of chemicals adds in the mud to control the viscosity and filtration properties. Inert solids such as barite are mixed in the mud to adjust the density. E SA SC M O PL -E E O C LS H AP S TE R In the conventional system of the rotary drilling, the rotary table rotates the drill stem, but the down-hole mud motor and the top drive device are applied to rotate the bit in the directional and horizontal well drilling, or to improve operations in the vertical well drilling. The technical advancement of the measurement-while-drilling tools (MWD) and the logging-while-drilling tools (LWD) has contributed to the almost real-time acquisition of the down-hole information. Owing to these tools it has become easy to drill directional and horizontal wells. Directional wells with long horizontal departure are called extended-reach-drilling (ERD) wells. The definition of an extended reach well is a well with a measured depth to true vertical depth ratio greater than 2.0. An ERD well in the united Kingdom drilled in 1999 to access offshore reserves from onshore had a record of a departure of 10 728 m with a measured depth of 11 287 m and approximately 1600 m true vertical depth. A definition of a horizontal well is a well with a hole section exceeding an inclination of 85 degrees. U N The adoption of the directional wells, extended-reach wells, horizontal wells, and the multilateral wells has a share in the economical development of oil and gas fields. Figure3 is an example of horizontal wells in the North Sea. Figure 4 shows various types of multilateral wells. Figure 3: Examples of Horizontal Wells in the North Sea (From Blikra H., Drevdal K.E., & Aarrestad T.V. (1994). Extended Reach, Horizontal and ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa E SA SC M O PL -E E O C LS H AP S TE R Complex Design Wells: Challenges, Achievements and Cost-benefits, Vol.2, Exploration, Production, and Reserves, Proc. of the 14th World Petroleum Congress, John Wiley & Sons. Reproduced Courtesy of World Petroleum Congress) Figure 4: Various Types of Advanced Wells (From Renard G., & Delamaide E. (1998). Complex Well Architecture、 IOR and Heavy Oils, Vol. Production, Proc. of the 15th World Petroleum Congress, John Wiley & Sons. Reproduced Courtesy of World Petroleum Congress) U N There are two basic types of down-hole mud motors; one is a turbine type (turbodrill), and the other is a positive displacement type (PDM). Figure 5 is an illustration of a multi-lobe (5/6) rotor/stator configuration type of the positive displacement motor. The motor is designed primarily for the directional performance drilling motor, but can also be used for straight-hole drilling. The top drive drilling system is suspended from the swivel, moves up and down together with it, and rotates directly the drill stem by electric or hydraulic motors. In the MWD and LWD systems, sensors are set within the drill collars just above the bit. In the MWD, the hole direction and inclination are measured, and the downhole weight and torque on the bit are included in a modified type of the tool. In the LWD, the formation resistivity and natural gamma ray are measured. The term MWD is often used as a synonym for the term LWD. Data measured at the downhole are transmitted to the surface in a real-time mode by coded mud pulses sending up inside of the drill stem or the annular space. Some sophisticated data transmission systems consist of electromagnetic wave propagation through the earth, or sonic wave propagation through the drill stem. ©Encyclopedia of Life Support Systems (EOLSS) U N E SA SC M O PL -E E O C LS H AP S TE R CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Figure 5: Diagram of Multi-Lobe Mud Motor (From the General catalog, Eastman Christensen TM Reproduced Courtesy of Baker Hughes INTEQ) Figure 6 is an illustration of a positive mud pulse system of the MWD system. In the right side of Figure 6, a MWD tool A is enlarged. In the left side of the Figure 6, positive mud pulses B move up through the drill stem to a pressure detector C at the surface. In the MWD tool measured data are converted into binary signals by an electronics package. The binary data control movement of a valve actuator to produce positive pulses of the ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa E SA SC M O PL -E E O C LS H AP S TE R mud in the drill stem. Figure 6: Positive Mud Pulse System of MWD (Modified from Busking B.E. (1979). Developments in Drilling Technology, Vol. 3, Production, Proc. of 10th World Petroleum Congress, Heyden & Son Ltd. Reproduced Courtesy of World Petroleum Congress) 3. Offshore Drilling Structures N 3.1. Technical Features of Offshore Drilling U Offshore drilling needs a floating or bottom-supported rig. Offshore drilling rigs have drilling equipment to conduct all the functions similar to the land drilling rigs and have facilities peculiar to offshore operations. Because of the location remote from infrastructure, offshore rigs also carry on board a number of service systems such as cementing, geophysical logging, and so on. In addition, there are lots of specific services on board such as ROV, divers, meteorological measurements, helicopter, etc. Accommodations and catering for crews working for 24 hours are required on the rig. All these factors make offshore rigs complex and sophisticated, and therefore offshore drilling costs are higher than land drilling costs for similar depth wells. There are two main categories of drilling rig structures used offshore: Mobile bottom- supported and floating rigs Stationary production structures used exclusively for development wells The first category of mobile structures includes the following rigs: ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Jack-up rigs Submersible rigs (swamp barges) Anchor-stationed or dynamically positioned semisubmersible rigs Anchor-stationed or dynamically positioned drillships Drilling structures used for developing offshore fields from stationary platforms are of two types: Self-contained platforms Tender or jack-up assisted platforms or well-protector jackets E SA SC M O PL -E E O C LS H AP S TE R The large production platform equips a complete set of drilling equipment, and is called as self-contained platform, which is described later in the Section 4 of the chapter. The small platform has a space only to accommodate derrick and drawworks, so a kind of tender assists the work, which is described later in the section. There is a guideline to choose roughly the type of offshore drilling rigs according to water depth and conditions of sea state and winds: - N - Water depth less than 25 m: submersible rigs (swamp barges) Water depth less than 50 m and calm sea: tender or jack-up assisted platforms Water depth less than 400 m and mild sea: self-contained platforms Water depth from 15 m to 150 m: jack-up rigs Water depth from 20 m to 2000 m: anchored drillships or semisubmersible rigs Water depth from 500 m to 3000 m: drillships or semisubmersible rigs with dynamic positioning system Isolated area with icebergs: drillships with dynamic positioning system Severe sea conditions: semisubmersible rigs or new generation drillships U 3.2. Mobile Bottom-supported Rigs 3.2.1. Jack-up Drilling Rigs (Jack-up Rigs, Self-elevating Drilling Rigs) Jack-up drilling rigs are used in water depth that typically ranges from 15 to 100 m with a maximum depth of 150 m. A hull of the jack-up drilling rig is typically constructed in a triangular shape with 3 legs, and in a few cases in rectangular or other shapes. A jack-up rig is moderately stable when floating on its hull with its legs up. A jack-up rig is moved by being towed by a tugboat or is transported by a heavy lift carrier from one drilling location to another, and then jacked above the sea surface on tubular or derrick legs. During towing, the legs are raised so that just a few feet protrude below the hull. When moving a jack-up rig, it is necessary to ensure that weather conditions (sea states and winds) do not exceed the allowable operating parameters established for each jack-up rig design. ©Encyclopedia of Life Support Systems (EOLSS) E SA SC M O PL -E E O C LS H AP S TE R CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa N Figure 7: Jack-Up Drilling Rig with Triangular Shape and 3 Legs (JDC Hakuryu 8) (Reproduced Courtesy of Japan Drilling Co.) U There are two basic leg configurations of jack-up rigs: Independent-leg type for relatively firm seabed: Each independent leg has a spud can on the end. The leg penetrates soil below the mud line, i.e. the sea bottom. The penetration depends on the composition of the soil and the shape of spud can. Mat-supported type for soft seabed: Legs is connected with a mat. The mat rests on the seabed to stably support the rig. The type is used on flat sea-bottom in water depth of up to 50 m. The penetration is slight. Legs of the independent-leg type of jack-up rigs are either vertical or tilted slightly outward to provide stability when the hull is raised out of the water. Each leg typically consists of three to six vertical members called chords. The vertical members (chords) are attached by cross members (k-braces) and form interconnected truss members. Each of the chords has a gear rack that runs the full length of the leg. The legs are raised and lowered with electric motors mounted to the main deck of the hull, which drive a number of pinion gears attached to each of the leg chord gear racks. Once the rig arrives at the drilling location, the legs are lowered to the sea floor and the hull is raised (jacked) out of the water. The hull is jacked up (elevated) at a speed that ranges from 0.3 to 1 m/min. ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Prior to raising the hull to the safe working height above the ocean waves, it is required to preload the legs that penetrate the ocean sediments. It is necessary for the sediments that the legs are pushing against to support the weight of the jack-up hull and also the additional drilling equipment placed on the rig during drilling operations and certain drilling loads. If the sediments are not dense enough to support these loads, one or more of the jack-up legs may suddenly/rapidly push (punch) through the sea floor sediments. A leg punch through can severely damage the legs and hull, thus jeopardizing the safety of the rig. E SA SC M O PL -E E O C LS H AP S TE R Once the preloading operation is complete, the hull can be raised to the desired height above the ocean waves. The height of the hull above the sea surface is called the air gap. The air gap depends on the expected height of the waves and also the height of the production platform if drilling a well on a production platform. Depending on the design of the rig, there is a slot either in the hull to allow the wellhead to be positioned under the rig floor, or the rig floor and support structure (substructure) can be extended/slid-out (cantilevered) from the side of the hull to the desired drilling position. Once the rig is placed in operating position, drilling process is carried out in a way similar to land operations after the outer casing and surface BOP is installed. U N 3.2.2. Submersible Drilling Rigs (Submersible Rigs, Swamp Barges) Figure 8: Submersible Drilling Rig (Noble FriRodli) (Reproduced Courtesy of Noble Drilling Corporation) ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Submersible drilling rigs consist of upper and lower hulls connected by a network of posts or beams. The drilling equipment and living quarters are installed on the upper hull deck. The lower hull has the buoyancy capacity to float and support the upper hull and equipment. When water is pumped into the lower hull, the rig submerges and rests on the seabed to provide a working place for the drilling. Movement and drilling operations proceed as that of the jack-up rig. Most submerged rigs are used only shallow waters of 8 to 10 meters. E SA SC M O PL -E E O C LS H AP S TE R Ship-shaped submersible rigs are also used, which are called swamp barges. Swamp barges have operated in swamp and marsh areas in Nigeria, Indonesia, and the southern part of United States of America. An arctic mobile drilling unit having conical, sloping-side structure belongs to the submersible type. 3.2.3. Tender-Assisted Platforms and Tenders U N In regions where the weather conditions are not harsh, it is possible to use lower cost fixed platforms that are designed to support only the derrick and the drawworks. The tender anchored alongside the platform contains drilling equipment such as pumps and tubular goods, and accommodation for personnel. A catwalk connects the platform and the tender. Figure 9: Platform (left) and Semisubmersible Tender (right) (Atwood Oceanics SEAHAWK) (Reproduced Courtesy of Atwood Oceanics, Inc.) If weather conditions (wind, swell, and current) become too harsh, the drilling operations must be shut down due to excessive motion of the tender. The tender platforms are used in Gulf of Guinea and the Persian Gulf waters where good weather conditions prevail, ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa resulting in low downtime less than 2% of total operation time. 3.3. Floating Offshore Drilling Rigs (Floaters) 3.3.1. Technologies Required by Floaters U N E SA SC M O PL -E E O C LS H AP S TE R In water depths greater than 100 m, floaters are commonly used. Drillships and semisubmersible rigs are classified as floaters. Drilling operations with floaters require peculiar technologies that are not used in the operations of mobile bottom-supported drilling rigs. They are stationkeeping system, marine riser system, and drillstring motion compensator. These systems are shown in Figure 10 in a case of semisubmersible rig with an anchor-mooring system. Figure 10: Outline of Drilling System of Semisubmersible Rig (Modified from Sekiyukaihatsu Gijutsu no Shiori (1st edition). Reproduced Courtesy of Japan Petroleum Development Association) ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Wind and current forces push a floater away from the location directly above the subsea wellhead. Waves raise and fall the floater. The technology has developed to overcome these effects caused by weather conditions. An adequate stationkeeping system is necessary to keep a floater within acceptable limits above the subsea wellhead. One of the methods is an anchor mooring system consisting of mooring lines (chains, wire ropes or a combination of chains and wire ropes) and anchors that is shown in Figure 10. It is important to arrange the mooring-system according to environmental conditions prevailing at the location. E SA SC M O PL -E E O C LS H AP S TE R The other is DPS, which is the acronym of dynamic positioning system. The vessel has several thrusters under the bottom of it. Computers onboard manipulate the thrusters automatically. Acoustic positioning beacons are located around the subsea wellhead, and send the signals to the vessel. And/or the vessel receives position signals from satellites. The computers analyze the signals, and command movement of the thrusters to keep the vessel's position within acceptable limits. U N The marine riser system consists of riser pipe, riser tensioners, and ancillaries. The riser pipe is connected to the top of subsea BOP, and is pulled up by the riser tensioner system onboard to keep vertical configuration. The riser pipe serves as a conduit for returning mud to the surface from the hole, and as a guide for running drill stem and casing from the floater to the hole under the seafloor. Figure 11: Crown Mounted Type of Heave Compensator ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa (Reproduced Courtesy of National Oilwell - Kristiansand) The motion compensator is a device to maintain constant weight on the bit during drilling operation in spite of oscillation of the floater due to wave motion. One of the devices is a bumper sub. The bumper sub is used as a component of a drill string, and is placed near the top of the drill collars. A mandrel composing an upper portion of the bumper sub slides in and out of a body of the bumper sub like a telescope in response to the heave of the rig, and this telescopic action of the bumper sub keeps the bit stable on the bottom-hole. The bumper sub is able to transmit the torque from the drill stem to the drill collars to rotate the bit. E SA SC M O PL -E E O C LS H AP S TE R Other device is a heave compensator. The heave compensator is placed in the derrick. There are two types of the heave compensator. One is a crown mounted heave compensator shown in Figure 11, and the other is an in-line compensator that is hung below the traveling block in the derrick shown in Figure 10. Both systems use either hydraulic or pneumatic cylinders that act as springs supporting the drill stem load, and allow the top of the drill stem to remain stationary, as the rig heaves up and down. 3.3.2. Drillships U N The first drillship was introduced in offshore services in 1953, and the dynamic positioning system was equipped in drillships in 1961. Drillships are shown in Figure 12. Figure 12: The Larger is a Drillship with Dual-Activity Drilling System (TSF Discoverer Enterprise), and the Smaller is a Previous Generation Drillship (TSF Discoverer 534) Alongside with a Supply Boat; (Reproduced Courtesy of Transocean Inc.) Drillships contain all of the equipment and material needed to drill and complete the well. An opening called a moon pool is equipped in the center of the ship from the main deck to the water. Drilling assembly, riser pipe, wellhead equipment, and so forth are lowered through the moon pool to the sea floor. ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa New generation drillships built in 1990s have the capacity to drill wells in the waters up to 3000 meters. These ships have production test facilities and oil storage tanks in addition to the usual drilling equipment. To improve the efficiency of deepwater operations with the aim of economic advantages, the PROPRIETARY dual-activity drilling system OF TRANSOCEAN INC. is shown in the larger drillship in Figure 12. The dual-activity rigs have two sets of drilling equipment such as mud pumps, drawworks, top drives, and mud treatment system. When a hole is drilled by the first drilling system, the second drilling system is used for making up casing and tubing strings in advance, and so on. Although the dual-activity system in the deepwater drillship is in the early stage of deployment, it is readily recognized that the system can save significant time and cost of drilling operations. E SA SC M O PL -E E O C LS H AP S TE R 3.3.3. Semisubmersible Drilling Rig U N Semisubmersible drilling rigs, which are simply called as semisubmersibles, jointed in the drilling fleet in 1962. Semisubmersibles have submerged pontoons (lower hulls) that are interconnected to the drilling deck by vertical columns as shown in Figure 10 and Figure 13. Figure 13: Semisubmersible Drilling Rig (JDC Hakuryu 3) (Reproduced Courtesy of Japan Drilling Co.) The lower hulls provide improved stability for the vessel. Also, the open area between the ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa vertical columns of semisubmersibles provides a reduced area on which the environment can act. In drilling operations, the lower hulls are submerged in the water about half-length of the column, but do not rest on the seabed. When a semisubmersible moves to a new location, the lower hulls float on the sea surface. Semisubmersible rigs are towed by boats, and some rigs have self-propelled capacity. On drilling site to keep the position, the anchors usually moor semisubmersibles, but the dynamic positioning systems are used by new generation semisubmersibles. Drilling equipments, mud systems, living quarters and so forth are placed on the deck, and ballast tanks, thrusters, sea water pumps are equipped in the lower hulls. E SA SC M O PL -E E O C LS H AP S TE R Semisubmersibles have minimum structures exposed to wave actions. So semisubmersibles provide more stable station for the drilling operations, and are able to operate in harsher environmental conditions as compared with drillships. The main disadvantage of semisubmersibles is that variable deck loading capacity required for storing drilling materials is limited by the structure. In the late 1970s, semisubmersibles had the capability to operate in 500 m water depth using an anchor system. In the late 1990s, the drilling operation capability of semisubmersibles increased to over 1800 meters water depth. Hoisting capacity and variable deck loading capacity are factors restricting the water depth capability of semisubmersibles. 3.4. Location Surveys for Offshore Drilling U N The offshore environment has a much more significant influence on drilling operations than the onshore environment. It is necessary to carry out a suite of location surveys before starting drilling operations in order to obtain data such as weather forecast during drilling operations, bathymetric map around the location, current profiles, properties of the sea bottom soil, topography of the sea bottom, and shallow geological hazards. The surveys will cover at least area a kilometer square centered on the proposed location. The survey companies analyze and evaluate the data to present reports that are used to prepare the mooring plan and the casing design for a top hole, and so forth. The minimum requirement of the survey includes following instruments: sparkers, sub-bottom profilers, side-scan sonars, fathometers, and gravity corers. Wind and current measurements for several months would be carried out at a proposed location about one year ago before operations. In critical areas, surveys in consideration of the culture, the archaeological and biological background are required. 4. Offshore Oil/Gas Production Systems 4.1. Brief History of Offshore Production Systems History of offshore petroleum production dates back to the end of the 19th century, when oil wells were drilled from piers constructed along the Californian coast of the United States of America. Geologically continental shelf is considered to be the extension of continental land and it was quite natural to pursue the extension of onshore oil accumulation down to sea bottom. These Californian wells were the first attempt of this ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa hunt. If hunt for petroleum, i.e. oil and natural gas, was extended from onshore to offshore, so was the use of equipment employed for its production. Petroleum production and field processing equipment typically includes wells to safely bring oil and gas from underground formation to surface, separation equipment to separate gas, oil and associated water, some means of transporting the products to market such as pressure booster (pump/compressor) and pipelines. In the majority of offshore fields these pieces of equipment used are essentially the same as those used in onshore fields. E SA SC M O PL -E E O C LS H AP S TE R In order to bring the equipment to offshore environment, some sort of supporting structure is needed to keep them above water, namely, offshore platforms. The above Californian piers were in this sense the first offshore platforms for petroleum production. Bottom-supported platforms have been in use ever since, though material to build them changed from wood to steel and concrete. These platforms, whilst good in that they can provide working environment probably closest to that onshore, have problems of sharply increasing cost with increasing water depth and long lead time for construction. To counter these problems, the petroleum industry came up with floating platforms in the 1970s. These include semisubmersibles, a natural functional extension of their sisters in the MODU fleet, ship-shaped floating production storage and offloading systems (FPSOs) and tension leg platforms (TLPs). More variations were added in later years. U N If these platforms are one way of coping with the offshore environment, enabling equipment intended for onshore application to be used there more or less as it is, the other way is to make the equipment capable of functioning in underwater environment and put it on the seabed, that is, a subsea production system. The first production equipment that was put completely underwater was a well, a gas well completed on the bottom of Lake Erie in United States of America in 1943. Although this well used completion equipment for onshore use without modification, one designed specifically for subsea application was subsequently developed. To date there have been more than 1000 wells worldwide drilled and completed subsea. The advancement of subsea technology meanwhile has led to development of other kinds of equipment tailored for subsea application, namely, manifolds to collect/divert produced and service fluids to desired flow paths, multi-phase pumps that can boost the pressure of the mixture of gas and liquid and gas/liquid separators, all with associated controls equipment. Today these platforms and subsea systems are applied in various combinations, each aimed at best suiting the particular environment in which they operate. These are offering the petroleum industry many options to choose from for production systems. However, research and development still continue to tap oil and gas in still deeper water and still harsher environment. 4.2. Various Types of Offshore Platforms 4.2.1. Bottom-supported Platforms The most widely used platforms are so-called template platforms. This type of platform, Figure14, usually consists of jacket, piles and deck. The jacket is fixed to sea bottom by ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa U N E SA SC M O PL -E E O C LS H AP S TE R means of piles and they together support the deck load. The deck is the topside structure of the platform and houses most of the equipment. The jacket is fabricated from steel tubulars at a yard, transported on and launched at the site from a barge, upended, lowered to the sea bottom and piled. The deck is usually divided into several modules, which are individually fabricated at a yard or shipyard, transported on a barge to the site where the jacket is already installed, lifted and fixed onto the jacket. Figure 14: Template Platform (Reproduced Courtesy of Offshore Iwaki Petroleum Company, Ltd.) Yard space and launch barge size available at the time of the project limit the jacket size. Cognac platform jacket installed in 312 m of water in the Gulf of Mexico in 1977 to 1978 was fabricated in three pieces and they were sequentially lowered to and connected together on the seabed, because there was no barge large enough to transport it in one piece at that time. Size of the individual deck module is greatly influenced by the lifting capacity of the crane vessel available. Attractiveness of less number of heavier lifts in terms of cost and other aspects has encouraged construction of heavy lifting vessels and those with twin cranes with several thousand ton lifting capacity are available. Function of this type of platform can vary from simple well protection to combined drilling and production with all the necessary equipment to drill wells and process and transport the ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa produced fluid. Storage function is not normally provided. This type has found application in water as deep as 411 m in the Gulf of Mexico. As the water depth increases, maintaining stiffness to rigidly resist the overturning moment as the template platforms do becomes prohibitively expensive. The alternative is structures that have much longer sway period than that of high-energy storm waves, avoiding resonance of structures with these waves. This type of platforms is called compliant towers and has been applied in water depths in excess of 500 m. U N E SA SC M O PL -E E O C LS H AP S TE R Another type of bottom-supported structure is the gravity platforms, Figure15. They derive required stability from their own weight. The substructure is usually built from concrete in deep, protected water near shore such as fjord and firth. Deck is usually built in one piece, brought on a barge or barges over to and then mated with almost completely submerged substructure. The completely assembled platform is then towed to the installation site and ballasted down to seafloor. Because of this unique way of construction, geographical locations to which this type is applicable are limited. Only a few applications can be found in the world except in the North Sea, where Norwegian fjords and Scottish firths provide ideal construction sites. This type is inevitably massive and suitable for self-contained drilling and production role. Storage capability can be easily incorporated, making this type suitable for situations where pipeline transportation is not readily available. Figure 15: Gravity Platform (From Ager-Hanssen H., & Medley E.J (1979): Main Considerations in Development of StatfJord Field, Volume of Production, Proc. of the 10th World Petroleum Congress. ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Reproduced Courtesy of World Petroleum Congress) 4.2.2. Floating Platforms E SA SC M O PL -E E O C LS H AP S TE R Though the bottom-founded platforms provide stable working environment, they typically have the drawbacks of long lead time and cost tendency quite sensitive to water depth. A solution to these problems has been the floating platforms moored to the seafloor. An additional advantage is seen in ease of relocating and reusing them after a field is depleted. This type was pioneered by a semisubmersible platform converted from an MODU in the mid 1970s. Quite a number of conversions were made particularly in the early days of this type of platforms so that fields could be brought into production quickly, improving project economics. Units intended for deep-water applications are mostly purpose-built so that they can satisfy the demanding conditions of such applications. U N Mooring is usually by eight to twelve point catenaries. Motion of the platform does not allow wells to be completed on the deck. So they are usually completed subsea and produced fluid is brought to the processing equipment aboard the platform by means of pipeline and riser, Figure 16. Riser is one of the technical focal points and flexible pipes are widely used for this application. Disadvantages of this type can be summarized as limited payload capacity and lack of storage capability. Figure 16: Semisubmersible Platform (Reproduced Courtesy of Norsk Hydro ASA) Another type of floating platform having relatively long history of application is the ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa U N E SA SC M O PL -E E O C LS H AP S TE R floating production storage and offloading system (FPSO). They are ship-shaped platform either with or without propulsion capability, Figure 17. First application was made in the late 1970s and it was a converted ocean-going tanker. Converted or purpose-built, FPSOs have a large payload and storage capacity making them suitable for application in isolated locations where pipeline transportation cannot be an option. Single point mooring is the most widely used station-keeping means, where the platform is allowed to weathervane around the mooring mechanism. Multi-point moorings have been applied in relatively benign environment such as West Africa and the Gulf of Suez. Like semisubmersibles wells are completed at separate locations, either subsea or on separate platforms. Figure 17: Floating Production Storage and Offloading System (Reproduced Courtesy of Norske Stats Oljeselskap a.s. (STATOIL)) One of the floating platforms specifically developed for deep-water application is the tension leg platform (TLP), Figure 18. Except for the very first application that appeared in the mid 1980s, platforms of this type are in water depths in excess of 500 m and the deepest application is in more than 1200 m of water. TLP is essentially a semisubmersible attached to the seabed by vertical members called tendons, which are usually made of steel tubulars and tensioned by excess buoyancy of the platform hull. Tendons are pinned to the seabed directly or indirectly by piles. Motion characteristics of the TLP allows wells to be completed on its deck, a big advantage because wells are one of the most important and expensive components of a petroleum production system and ease of access to them is a matter of prime concern in field development planning. ©Encyclopedia of Life Support Systems (EOLSS) E SA SC M O PL -E E O C LS H AP S TE R CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa N Figure 18: Tension Leg Platform (Reproduced Courtesy of ConocoPhillips Norge) U The most recent species of floating platform is the spar platform, or deep-draft caisson vessel (DDCV). As its name indicates, it has a deeply submerged, spar-shaped hull and a deck structure. The platform is moored to the seabed by means of catenary or taut mooring. This type of structure was first applied as a storage and loading buoy in the North Sea in the mid 1970s. Application for the drilling and production role came into reality in the latter half of the 1990s in the Gulf of Mexico, and three spar production systems are operated there as of 2000. A platform of this type has been built in 1463 m of water. Like TLP it is possible to put Christmas trees of wells on the platform deck, and like FPSO, oil storage capability can be incorporated in the hull, making this type attractive at isolated deep water locations. 4.3. Subsea Production Systems Subsea-completed wells were initially envisaged by many as an unavoidable evil for deep-water production. As their reliability improved and confidence was gained on them, they have found increasing use even in the water depth range of bottom-supported platforms. Reservoirs discovered close to existing infrastructures or parts of producing ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa reservoirs too far away to reach from existing platforms are typically developed utilizing subsea wells tied back to the host platforms, providing economical means of field development. Also exploratory wells, typically plugged and abandoned after a short period of test not so long ago, are completed subsea and put into production for some months using drilling vessels equipped with temporary production facilities or purpose-built well test vessels, providing valuable reservoir data for subsequent field development planning. 4.3.1. Subsea Christmas Trees U N E SA SC M O PL -E E O C LS H AP S TE R Subsea trees are, like land trees, primary means of flow control for subsea wells and consist of series of valves and sometimes a flow control device (choke) along the flow path of produced fluid with associated controls equipment, Figure 19. Although trees in early days of subsea development relied heavily on diver assistance in installation and operation, the trend is toward less reliance and remotely operated connectors, valves and chokes by means of hydraulics are used extensively. They are installed by drilling rigs using guidelines established between a pre-installed guide base structure and a rig for positioning and orientating. For deep waters where use of guidelines is not practical, guidelineless system is available. Figure19: Subsea Christmas Tree (From API RP 17A “Recommended Practice for Design and Operation of Subsea Production Systems”, Second Edition, 1996. Reproduced Courtesy of the American Petroleum Institute.) ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa U N E SA SC M O PL -E E O C LS H AP S TE R Where it is desirable to drill a number of wells from one location, a well template is sometimes used, Figure 20. A template is a steel structure that provides structural support and appropriate spacing to wells. As the drilling rig can move from one well position to another only by adjusting anchor lines, use of template can bring savings in drilling cost. Figure 20: Well Template (From API RP 17A “Recommended Practice for Design and Operation of Subsea Production Systems”, Second Edition, 1996. Reproduced Courtesy of the American Petroleum Institute.) 4.3.2. Subsea Manifolds A manifold consists of appropriately arranged valves and pipings with associated controls equipment and a structure to support these components. It allows produced fluid to be commingled or diverted and injection fluids to be distributed to desired flow paths. With a ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa N E SA SC M O PL -E E O C LS H AP S TE R subsea manifold, number of flowlines and injection lines between wells and host platform can be reduced substantially, saving large amount of investment. Disadvantage is added complexity in not-easily-accessible subsea environment with implications on maintenance cost. A manifold can be a stand-alone component or built into a well template, Figure 21. U Figure 21: Subsea Manifold Mounted on Well Template (From API RP 17A “Recommended Practice for Design and Operation of Subsea Production Systems”, Second Edition, 1996. Reproduced Courtesy of the American Petroleum Institute.) 4.3.3. Subsea Boosting and Processing Wells, templates and manifolds have been successfully applied subsea. The next candidates for subsea application are multi-phase pressure boosters and fluid separators. The idea behind the multi-phase pressure booster, or multi-phase pump, is that if pressure boosting can be done at the subsea wells, a platform long distance away can be their host, widening the possible range of step-out development. More ambitiously, produced fluid could be sent directly onshore, eliminating the need for host platform altogether. Difficulties in boosting pressure of multi-phase fluid with widely fluctuating void fraction have prompted some to take a different approach, that is, to separate produced fluid into different phases and then boost the pressure. Another application of the subsea ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa separation technology being considered is to separate produced water at the wells and re-inject it underground for disposal, saving energy to transport unnecessary water to surface. The subsea boosting concept has been considered since the early 1980s and the subsea separation concept a little later. Both technologies have come to the stage of field-testing prototype equipment, but are yet to be applied on commercial basis. 4.3.4. Subsea Control System E SA SC M O PL -E E O C LS H AP S TE R In order to ensure safe and efficient operation of the subsea production systems, their various components such as valves, chokes and connectors must be properly controlled. Also it is often desirable to have feedback from these components and other instrumentation indicating various process parameters such as downhole/wellhead pressures and temperatures and fluid flow rate and diagnostic parameters of the control system itself. Control systems currently employed utilize hydraulics and often electronics to differing degrees. Of these most commonly used is the electro-hydraulic multiplexed system. The system requires hydraulic power supplied from the host platform to actuate control devices. Coded signals for operating these field devices and data signals from field instruments to the host platform are transmitted through an electrical cable. Electric power is usually supplied through a separate cable, but superposition of data signals on the power cable has been successfully tried. Research is underway for developing an all-electric control system, which will eliminate the need for hydraulic link between the subsea system and host platform altogether, leading to further cost reduction. 4.4. Prospect of Offshore Production System U N The technology for offshore development has been commercial technology all along. Every time oil was found in such an environment where the offshore petroleum industry had had no previous experience, new technology was developed to cope with it and commercially produce oil there. In pursuing this goal, the balance between safety, reliability, economics and, increasingly, environmental considerations has never been forgotten. The North Sea developments of the 1970s and the deep-water developments in the Gulf of Mexico and Brazil of the 1990s were probably the two epoch-making eras in the history of this industry. The North Sea-type platforms with huge payload capacity to accommodate all required functions on a single structure, sometimes with built-in or separate storage capacity, made it possible to develop fields in remote, isolated areas. Implications of the advancement of deep-water technology are obvious. The twenty first century will see this process continuing, at probably a slow but steady pace. The North Sea activities have already spread to the Atlantic Frontier (west of Shetland) to the west and the Norwegian Sea to the north. The water depth record of both subsea completion and platform installation has exceeded 1800 m and developments in more than 2000 m water depths are being planned. Also somewhat specialty technology ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa is enabling oil production in such ice-infected areas as offshore Newfoundland and offshore Sakhalin Island. E SA SC M O PL -E E O C LS H AP S TE R A major challenge may come, however, when the industry moves to tap methane hydrate deposits under the ocean floor, generally in waters more than 500 m deep. Methane hydrate is a solid compound of water and methane where methane molecules are taken in to the cage-like structure formed by water molecules. Production of methane from hydrate is considered to involve its dissociation. Although the biggest problem is seen in maintaining the dissociation rate high enough to sustain commercially viable rate of gas production, problems are also foreseen, for example, in maintaining integrity of wells and preventing or coping with potential sea floor instability such as subsidence. The attempts to meet the challenge have already begun. When it is successfully met, humans will have obtained another important source of precious energy. Glossary Casing: Christmas tree: Drill stem: Riser: U N Well completion: API: BOP: DDCV: DPS: ERD: FPSO: IADC: LWD: MODU: MWD: PDC: PDM: ROV: TLP: Steel pipe lowered into a hole drilled and bonded to formation by cement to keep the well safe. An assemblage of valves installed at the top of a well to control the flow of oil and gas after the well has been completion. A drilling assemblage of tubular goods, to rotate a bit at the bottom of the hole from the surface, which comprises of the kelly, the drill pipe, and drill collars. Any pipe with the fluid flow upward in it. In offshore drilling a marine riser system is used to establish a connection between the rig and the seabed. In offshore petroleum production, production riser systems extend from the seabed to the deck of the production platform. A series of work to make a well ready for production after it has been drilled and tested. Although there are wide variations, it typically involves installing the production (deepest) casing, perforating the casing and installing tubing (flow path for produced fluid) and the Christmas tree. A subsea completion or subsea-completed well is a well that sits entirely, that is, up to its Christmas tree, on the seabed. American Petroleum Institute Blowout Preventer Deep-Draft Caisson Vessel Dynamic Positioning System Extended Reach Drilling Floating Production Storage and Offloading system International Association of Drilling Contractors Logging-While-Drilling tools Mobile Offshore Drilling Unit Measurement-While-Drilling tools Polycrystalline Diamond Compacts Positive Displacement Motor Remotely Operated Vehicle Tension Leg Platform ©Encyclopedia of Life Support Systems (EOLSS) CIVIL ENGINEERING – Offshore Drilling and Production Equipment - S. Tanaka, Y. Okada, Y. Ichikawa Thermally Stable Polycrystalline TSP: Bibliography Bourgoyne Jr. A.T., Millheim K.K., Chenevert M.E. and Young Jr. F.S. (1991). Applied Drilling Engineering. Richardson, TX 75083-3836, USA: Society of Petroleum Engineers. [This is a good textbook on rotary drilling engineering.] Gerwick, Jr. B.C. (1986). Construction of Offshore Structures. Baffins Lane, Chichester, Sussex PO19 1UD, UK: John Wiley & Sons. [This book gives details of how offshore structures, particularly the bottom-supported platforms, are constructed.] E SA SC M O PL -E E O C LS H AP S TE R Silcox W.H., Bodine J.A., Burns G.E., Reeds C.B., Wilson D.L. and Sauve E.R. (1989). Chapter 18 Offshore Operations. Petroleum Engineering Handbook (editor-in-chief H.B. Bladley), pp. 18-1 – 18-52. Richardson, TX 75083-3836, USA: Society of Petroleum Engineers. [This work provides a good overview of offshore drilling and production systems and operations.] API Standards and Publications. 1220 L Street, Northwest Washington, D.C. 20005-4070, USA. American Petroleum Institute. [The series contain detail standards and information on rotary drilling method of onland and offshore operations.] OTC Proceedings. Richardson, TX 75083-3836, USA. Society of Petroleum Engineers. [The proceedings published yearly provide up-to-date information on offshore engineering and operations.] Proceedings of SPE/IADC Drilling Conference. Richardson, TX 75083-3836, USA. Society of Petroleum Engineers. [The proceedings published yearly provide up-to-date information on drilling engineering.] Biographical Sketches Shoichi Tanaka is professor emeritus of the University of Tokyo in Tokyo, Japan. He majors in drilling engineering and petroleum engineering. He holds a Doctor of Engineering in mining engineering from the University of Tokyo. He was with the University of Tokyo from 1960 to 1995. U N Yo Okada is general manager of Petroleum Engineering & Consulting Dept. with Japan Oil Engineering Co. (JOE) in Tokyo and heads a pool of engineers and scientists, providing a range of technical services to various clients in the petroleum industry, financial institutions and investors. He joined JOE in 1975 and has worked in numerous projects in varying capacities since then. Typical projects include offshore field construction and maintenance, field development project coordination and management, field facility technical assessment, field development feasibility studies including economic evaluation, technology surveys and technical seminars. He holds a BSc in mining engineering from the University of Tokyo and an MA in economics from Vanderbilt University, Nashville, Tennessee. Yuichiro Ichikawa is currently working concurrently as general manager of Methane Hydrate Development Division of Tokyo head office of Japan Drilling Co. (JDC). He is responsible for drilling operations, drilling engineering and offshore engineering services to the drilling industry and governmental bodies. He joined JDC in 1977 and has worked in numerous projects in varying capacities since then. Areas of engineering expertise - Deepwater Drilling Rig Design, Deepwater Location Surveys, Deepwater Well Planning, Deepwater Subsea Well Control, Coring Technology, Downhole Tools Development, Hydrate Drilling, Safety Management, Information Management, Logistics Support and Deepwater Offshore Drilling. He holds a BSc in petroleum engineering from the University of Tokyo. To cite this chapter S. Tanaka, Y. Okada, Y. Ichikawa, (2005), OFFSHORE DRILLING AND PRODUCTION EQUIPMENT, in Civil Engineering, [Eds. Kiyoshi Horikawa, and Qizhong Guo], in Encyclopedia of Life Support Systems (EOLSS), Developed under the Auspices of the UNESCO, Eolss Publishers, Oxford ,UK, [http://www.eolss.net] ©Encyclopedia of Life Support Systems (EOLSS)