© 2012–2013 Mechanical Vibrations by Massimo Cavacece
advertisement

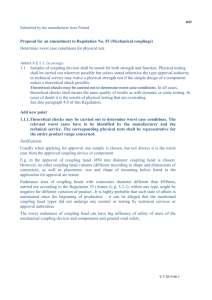
Static and Dynamic coupling Focus 1 Coordinate coupling 2 Static coupling 3 Dynamic coupling 4 Normal modes c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Dynamical and Static coupling The two equations fr the undamped system have the form: m11 ẍ1 + m12 ẍ2 + k11 x1 + k12 x2 = 0 m21 ẍ1 + m22 ẍ2 + k21 x1 + k22 x2 = 0 or in matrix form m11 m12 ẍ1 k11 k12 x1 0 + = m21 m22 ẍ2 k21 k22 x2 0 (1) (2) which reveals the type of coupling present: Dynamical coupling exists if the mass matrix is nondiagonal; Static coupling exists if the stiffness matrix is nondiagonal; It is also possible to have both forms of coupling. c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Static coupling x=0 l1 l2 x G J k1 k2 Figure: Coordinate leading to static coupling c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Static coupling Choosing coordinates x and ϑ, where x is the linear displacement of the center of the mass, the system will have static coupling ẍ k1 + k2 k2 · l2 − k1 · l1 m 0 x 0 + = 2 2 0 J ϑ 0 k2 l2 − k1 · l1 k1 · l1 + k2 · l2 ϑ̈ (3) If k1 · l1 = k2 · l2 , the coupling disappears, and we obtain uncoupled x and ϑ vibrations. c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Dynamic coupling x c =0 l3 l4 xc J C G e k1 k2 Figure: Coordinate leading to dynamic coupling c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Dynamic coupling There is some point C along the bar where a force applied normal to the bar produces pure translation k1 · l3 = k2 · l4 . The equation of motion in terms of xc and ϑ can be shown to be ẍ m m·e + m·e J ϑ̈ k1 + k2 0 xc 0 = ϑ 0 0 k1 · l32 + k2 · l42 (4) which shows that the coordinates chosen eliminated the static coupling and introduced dynamic coupling. c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Static and Dynamic coupling x 1 =0 l1 x1 J G k1 k2 l Figure: Coordinate leading to static and dynamic coupling c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Static and Dynamic coupling If we choose x = x1 at the end of the bar the equation of motion become ẍ1 k1 + k2 k2 · l m m · l1 x1 0 + = 2 m · l1 J ϑ 0 k2 l k2 · l ϑ̈ (5) both static and dinamic coupling are now present. c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Modal Analysis Two natural frequencies f1 ≈ 1.10 Hz f2 ≈ 1.44 Hz . The amplitude ratios for the two frequencies are X m X m ≈ 0.33 , ≈ −4.47 Θ f1 rad Θ f2 rad (6) (7) c 2012–2013 Mechanical Vibrations by Massimo Cavacece Static and Dynamic coupling Normal modes G1 (1) Nodo 1.10 Hz (2) k1 G2 k2 4.47 m Nodo (2) G2 1.44 Hz G1 (1) k1 k2 0.33 m Figure: Normal modes c 2012–2013 Mechanical Vibrations by Massimo Cavacece