Fixed-Point Arithmetic
advertisement

Fix Point Implementation of
C
Control
l Al
Algorithms
ih
Anton Cervin
Cer in
Lund University
Outline
• A-D and D-A Quantization
• Computer arithmetic
– Floating-point arithmetic
– Fixed-point arithmetic
• Controller realizations
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Finite-Wordlength Implementation
Control analysis and design usually assumes infinite-precision
arithmetic, parameters/variables are assumed to be real numbers
Error sources in a digital implementation with finite wordlength:
• Quantization in A-D converters
• Quantization of parameters (controller coefficients)
• Round-off and overflow in addition, subtraction, multiplication,
division, function evaluation and other operations
• Quantization in D-A converters
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
The magnitude of the problems depends on
• The wordlength
• The type of arithmetic used (fixed or floating point)
• The controller realization
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
A-D and D-A Quantization
A-D and D-A converters often have quite poor resolution, e.g.
• A-D: 10–16 bits
• D-A: 8–12 bits
Quantization is a nonlinear phenomenon; can lead to limit cycles
and bias. Analysis approaches:
• Nonlinear analysis
– Describing function approximation
– Theory of relay oscillations
• Linear analysis
– Model quantization as a stochastic disturbance
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example: Control of the Double Integrator
Process:
P(s) = 1/s2
Sampling period:
h=1
Controller (PID):
0.715z2 − 1.281z + 0.580
C( z) =
( z − 1)( z + 0.188)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
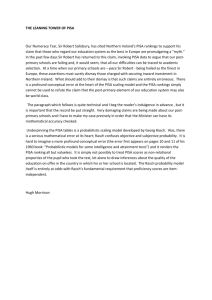
Simulation with Quantized A-D Converter (δ y = 0.02)
Output
1
0
0
50
100
150
0
50
100
150
0
50
100
150
Output
1.02
0.98
Input
0.05
0
−0.05
Time
Limit cycle in process output with period 28 s, amplitude 0.01
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
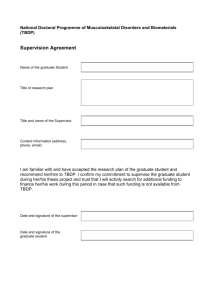
Simulation with Quantized D-A Converter (δ u = 0.01)
Output
1
0
0
50
100
150
0
50
100
150
0
50
100
150
Unquantized
0.05
0
−0.05
Input
0.05
0
−0.05
Time
Limit cycle in controller output with period 39 s, amplitude 0.005
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Describing Function Analysis
(a)
Im
(b)
∑
H (z )
NL
Re
−1 /Yc (A)
−1
(
H e iωh
)
Limit cycle with frequency ω 1 and amplitude A1 predicted if
iω 1 h
H (e
1
)=−
Yc ( A1 )
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Describing Function of Roundoff Quantizer
0< A<
n
X
4δ
πA
i =1
s
1−
2i − 1
δ
2A
2
1
0
0
δ
2
2n − 1
2n + 1
δ <A<
δ
2
2
Yc(A)
Yc ( A) =
0
2
4
A/δ
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Nyquist Curve of Sampled Loop Transfer Function
Imaginary axis
2
0
−2
−6
−4
−2
0
Real axis
First crossing at ω 1 = 0.162 rad/s. Predicts limit cycle with period
39 s and amplitude A1 = δ /2.
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Linear Analysis of Quantization Noise
a
a
y
π
y
Q
π
ea
∑
Roundoff quantization: ea uniformly distributed over [−δ /2, δ /2],
V ( ea ) = δ 2 /12
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Pulse-Width Modulation (PWM)
Poor D-A resolution (e.g. 1 bit) can often be handled by fast
switching between levels + low-pass filtering
The new control variable is the duty-cycle of the switched signal
PWM Output
Filtered PWM Output
Desired Output
1.5
1
Output
0.5
0
−0.5
−1
−1.5
0
2
4
6
8
10
Time
12
14
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
16
18
20
Floating-Point Arithmetic
Hardware-supported on modern high-end processors (FPUs)
Number representation:
± f $ 2± e
• f : mantissa, significand, fraction
• 2: base
• e: exponent
The binary point is variable (floating) and depends on the value of
the exponent
Dynamic range and resolution
Fixed number of significant digits
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
IEEE 754 Binary Floating-Point Standard
Used by almost all FPUs; implemented in software libraries
Single precision (Java/C float):
• 32-bit word divided into 1 sign bit, 8-bit biased exponent, and
23-bit mantissa (( 7 decimal digits)
• Range: 2−126 − 2128
Double precision (Java/C double):
• 64-bit word divided into 1 sign bit, 11-bit biased exponent, and
52-bit mantissa (( 15 decimal digits)
• Range: 2−1022 − 21024
Supports Inf and NaN
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
What is the output of this program?
#include <stdio.h>
main() {
float a[] = { 10000.0, 1.0, 10000.0 };
float b[] = { 10000.0, 1.0, -10000.0 };
float sum = 0.0;
int i;
for (i=0; i<3; i++)
sum += a[i]*b[i];
printf("sum = %f\n", sum);
}
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Remarks:
• The result depends on the order of the operations
• Finite-wordlength operations are neither associative nor
distributive
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Arithmetic in Embedded Systems
Small microprocessors used in embedded systems typically do not
have hardware support for floating-point arithmetic
Options:
• Software emulation of floating-point arithmetic
– compiler/library supported
– large code size, slow
• Fixed-point arithmetic
– often manual implementation
– fast and compact
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Fixed-Point Arithmetic
Represent all numbers (parameters, variables) using integers
Use binary scaling to make all numbers fit into one of the integer
data types, e.g.
• 8 bits (char, int8_t):
[−128, 127]
• 16 bits (short, int16_t): [−32768, 32767]
• 32 bits (long, int32_t): [−2147483648, 2147483647]
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Challenges
• Must select data types to get sufficient numerical precision
• Must know (or estimate) the minimum and maximum value of
every variable in order to select appropriate scaling factors
• Must keep track of the scaling factors in all arithmetic
operations
• Must handle potential arithmetic overflows
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Fixed-Point Representation
In fixed-point representation, a real number x is represented by an
integer X with N = m + n + 1 bits, where
• N is the wordlength
• m is the number of integer bits (excluding the sign bit)
• n is the number of fractional bits
0
Sign bit
1
1
0
Integer bits
1
0
1
1
Fractional bits
“Q-format”: X is sometimes called a Qm.n or Qn number
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Conversion to and from fixed point
Conversion from real to fixed-point number:
X := round( x ⋅ 2n )
Conversion from fixed-point to real number:
x := X ⋅ 2−n
Example: Represent x = 13.4 using Q4.3 format
X = round(13.4 ⋅ 23 ) = 107 (= 011010112 )
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
A Note on Negative Numbers
In almost all CPUs today, negative integers are handled using
two’s complement: A “1” in the sign bit means that 2 N should be
subtracted
Example ( N = 8):
Binary representation
Interpretation
00000000
00000001
..
.
01111111
10000000
10000001
..
.
0
1
..
.
127
-128
-127
..
.
1111111
-1
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Range vs Resolution for Fixed-Point Numbers
A Qm.n fixed-point number can represent real numbers in the
range
[−2m , 2m − 2n ]
while the resolution is
2−n
Fixed range and resolution
• n too small [ poor resolution
• n too large [ risk of overflow
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Fixed-Point Addition/Subtraction
Two fixed-point numbers in the same Qm.n format can be added
or subtracted directly
The result will have the same number of fractional bits
z= x+y
\
Z = X +Y
z= x−y
\
Z = X −Y
• The result will in general require N + 1 bits; risk of overflow
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example: Addition with Overflow
Two numbers in Q4.3 format are added:
x = 12.25
[
X = 98
y = 14.75
[
Y = 118
Z = X + Y = 216
This number is however out of range and will be interpreted as
216 − 256 = −40
[
z = −5.0
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
0
1
1
0
0
0
1
0
+
0
1
1
1
0
1
1
0
=
1
1
0
1
1
0
0
0
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Fixed-Point Multiplication and Division
If the operands and the result are in the same Q-format,
multiplication and division are done as
z= x⋅y
\
Z = ( X ⋅ Y )/2n
z = x/ y
\
Z = ( X ⋅ 2n )/ Y
• Double wordlength is needed for the intermediate result
• Division by 2n is implemented as a right-shift by n bits
• Multiplication by 2n is implemented as a left-shift by n bits
• The lowest bits in the result are truncated (round-off noise)
• Risk of overflow
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example: Multiplication
Two numbers in Q5.2 format are multiplied:
x = 6.25
[
X = 25
y = 4.75
[
Y = 19
Intermediate result:
X ⋅ Y = 475
Final result:
Z = 475/22 = 118
[
z = 29.5
(exact result is 29.6875)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
$
=
0
0
0
0
0
0
0
1
0
0
0
1
1
0
0
1
0
0
1
0
0
0
1
1
1
1
0
1
1
0
1
1
0
1
1
1
0
1
1
0
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Multiplication of Operands with Different Q-format
In general, multiplication of two fixed-point numbers Qm1 .n1 and
Qm2 .n2 gives an intermediate result in the format
Qm1 + m2 .n1 + n2
which may then be right-shifted n1 + n2 − n3 steps and stored in the
format
Qm3 .n3
Common case: n2 = n3 = 0 (one real operand, one integer
operand, and integer result). Then
Z = ( X ⋅ Y )/2n1
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Implementation of Multiplication in C
Assume Q4.3 operands and Q4.3 result
#include <inttypes.h>
#define n 3
int8_t X, Y, Z;
int16_t temp;
...
temp = (int16_t)X * Y;
temp = temp >> n;
Z = temp;
/*
/*
/*
/*
define int8_t, etc. (Linux only)
number of fractional bits
Q4.3 operands and result
Q9.6 intermediate result
*/
*/
*/
*/
/* cast operands to 16 bits and multiply */
/* divide by 2^n
*/
/* truncate and assign result
*/
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Implementation of Multiplication in C with Rounding
and Saturation
#include <inttypes.h>
#define n 3
int8_t X, Y, Z;
int16_t temp;
...
temp = (int16_t)X * Y;
temp = temp + (1 << n-1);
temp = temp >> n;
if (temp > INT8_MAX)
Z = INT8_MAX;
else if (temp < INT8_MIN)
Z = INT8_MIN;
else
Z = temp;
/*
/*
/*
/*
defines int8_t, etc. (Linux only)
number of fractional bits
Q4.3 operands and result
Q9.6 intermediate result
*/
*/
*/
*/
/*
/*
/*
/*
cast operands to 16 bits and multiply
add 1/2 to give correct rounding
divide by 2^n
saturate the result before assignment
*/
*/
*/
*/
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Implementation of Division in C with Rounding
#include <inttypes.h>
#define n 3
int8_t X, Y, Z;
int16_t temp;
...
temp = (int16_t)X << n;
temp = temp + (Y >> 1);
temp = temp / Y;
Z = temp;
/*
/*
/*
/*
define int8_t, etc. (Linux only)
number of fractional bits
Q4.3 operands and result
Q9.6 intermediate result
*/
*/
*/
*/
/*
/*
/*
/*
cast operand to 16 bits and shift
Add Y/2 to give correct rounding
Perform the division (expensive!)
Truncate and assign result
*/
*/
*/
*/
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example: Atmel mega8/16 instruction set
Mnemonic
Description
ADD
SUB
MULS
ASR
LSL
Add two registers
Subtract two registers
Multiply signed
Arithmetic shift right (1 step)
Logical shift left (1 step)
# clock cycles
1
1
2
1
1
• No division instruction; implemented in math library using
expensive division algorithm
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example Evaluation of Execution Time and Code
Size
• Atmel AVR ATmega16 microcontroller @14.7 MHz with
16K ROM controlling a rotating DC servo
POWER
ø 0,8
Moment
Reference
SAT.
ø 0,5
OVL.RESET
ø 0,5
ø 0,5
POS.RESET
øּ0,65
øּ0,65
Int
ø 0,8
ø 0,8
Off
Ext.
Off
Int.
k
Js +ּd
Σ
ω
ø 0,8
θ
x0,1
Ref out
FRICTION
COMPENSATION
ON
ø 0‚8
ω
+
x0,1
øּ0,65
ø 0‚95
Ext. in
1
s
ø 0,8
ø 0,95
x0,2
øּ0,3
øּ0,65
ø 0‚95
x0,2
øּ0,3
øּ0,3
øּ0,65
-1
-1
-1
4V/A
ø 0‚8
gnd
LTH Reglerteknik RB 88
ø 0‚8
Current
magnitude
ø 0.8
ø 0.8
ø 0,8
ø 0,8
ø 0.8
ø 0.8
LTH ReglerteknikּR/B 88
• C program that implements simple state feedback controllers
– velocity control (one state is measured)
– position control (two states are measured)
• Comparison of floating-point and fixed-point implementations
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example Evaluation: Fixed-Point Implementation
The position controller (with integral action) is given by
u( k) = l1 y1 ( k) + l2 y2 ( k) + l3 I ( k)
I ( k + 1) = I ( k) + r( k) − y2 ( k)
where
l1 = −5.0693,
l2 = −5.6855,
l3 = 0.6054
Choose fixed-point representations assuming word length N = 16
• y1 , y2 , u, r are integers in the interval [−512, 511] ∈ Q10.0
• Let I ∈ Q16.0 to simplify the addition
• Use Q4.12 for the coefficients, giving
L1 = −20764,
L2 = −23288,
L3 = 2480
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example Evaluation: Pseudo-C Code
#define
#define
#define
#define
L1
L2
L3
QF
-20764
-23288
2480
12
/*
/*
/*
/*
Q4.12 */
Q4.12 */
Q4.12 */
number of fractional bits in L1,L2,L3 */
int16_t y1, y2, r, u, I=0; /* Q16.0 variables */
for (;;) {
y1 = readInput(1);
/* read Q10.0, store as Q16.0 */
y2 = readInput(2);
/* read Q10.0, store as Q16.0 */
r = readReference();
u = ((int32_t)L1*y1 + (int32_t)L2*y2 + (int32_t)L3*I) >> QF;
if (u >= 512) u = 511;
/* saturate to fit into Q10.0 output */
if (u < -512) u = -512;
writeOutput(u);
/* write Q10.0 */
I += r - y2;
/* TODO: saturation and tracking... */
sleep();
}
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example Evaluation: Measurements
Floating-point implementation using float s:
• Velocity control: 950 µ s
• Position control: 1220 µ s
• Total code size: 13708 bytes
Fixed-point implementation using 16-bit integers:
• Velocity control: 130 µ s
• Position control: 270 µ s
• Total code size: 3748 bytes
One A-D conversion takes about 115 µ s. This gives a 25–50
times speedup for fixed point math compared to floating point. The
floating point math library takes about 10K (out of 16K available!)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Controller Realizations
A linear controller
b0 + b1 z−1 + . . . + bn z−n
H ( z) =
1 + a1 z−1 + . . . + an z−n
can be realized in a number of different ways with equivalent inputoutput behavior, e.g.
• Direct form
• Companion (canonical) form
• Series (cascade) or parallel form
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Direct Form
The input-output form can be directly implemented as
u( k) =
n
X
i =0
bi y( k − i) −
n
X
ai u( k − i)
i =1
• Nonminimal (all old inputs and outputs are used as states)
• Very sensitive to roundoff in coefficients
• Avoid!
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Companion Forms
E.g. controllable or observable canonical form
−a1 −a2 ⋅ ⋅ ⋅ −an−1 −an
1
1
0
0
0
0
0
1
0
0
x( k + 1) =
x( k) +
y( k)
.
.
.
.
.
.
0
0
0
1
0
u( k) = b1 b2 ⋅ ⋅ ⋅ bn x( k)
• Same problem as for the Direct form
• Very sensitive to roundoff in coefficients
• Avoid!
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Pole Sensitivity
How sensitive are the poles to errors in the coefficients?
Assume characteristic polynomial with distinct roots. Then
A( z) = 1 −
n
X
a k z− k
n
Y
(1 − p j z−1 )
=
j =1
k=1
Pole sensitivity:
pi
a k
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
The chain rule gives
A( z)
A( z) pi
=
pi a k
a k
Evaluated in z = pi we get
pni − k
pi
= Qn
a k
j =1, j ,=i ( pi − p j )
• Having poles close to each other is bad
• For stable filter, an is the most sensitive parameter
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Better: Series and Parallel Forms
Divide the transfer function of the controller into a number of firstor second-order subsystems:
H1 ( z)
H ( z)
Direct Form
H1 ( z)
+
H2 ( z)
H2 ( z)
Series Form
Parallel Form
• Try to balance the gain such that each subsystem has about
the same amplification
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Example: Series and Parallel Forms
z4 − 2.13z3 + 2.351z2 − 1.493z + 0.5776
C( z) = 4
z − 3.2z3 + 3.997z2 − 2.301z + 0.5184
=
z2 − 1.635z + 0.9025 z2 − 0.4944z + 0.64 z2
− 1.712z + 0.81
z2
− 1.488z + 0.64
−5.396z + 6.302
6.466z − 4.907
=1+ 2
+ 2
z − 1.712z + 0.81
z − 1.488z + 0.64
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
(Direct)
(Series)
(Parallel)
Direct form with quantized coefficients ( N = 8, n = 4):
Bode Diagram
Magnitude (dB)
40
20
0
C(z)
C(z) direct form N=8
−20
0
Phase (deg)
−45
−90
−135
−180
−225
3
10
4
10
Frequency (rad/sec)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
5
10
Pole−Zero Map
1
0.8
0.6
0.4
Imag Axis
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
−1
−0.5
0
0.5
Real Axis
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
1
Series form with quantized coefficients ( N = 8, n = 4):
Bode Diagram
30
Magnitude (dB)
20
10
0
−10
C(z)
C(z) series form N=8
−20
0
Phase (deg)
−45
−90
−135
−180
−225
3
10
4
10
Frequency (rad/sec)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
5
10
Pole−Zero Map
1
Imag Axis
0.5
0
C(z)
C(z) cascade form N=8
−0.5
−1
−1
−0.5
0
0.5
Real Axis
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
1
Jackson’s Rules for Series Realizations
How to pair and order the poles and zeros?
Jackson’s rules (1970):
• Pair the pole closest to the unit circle with its closest zero.
Repeat until all poles and zeros are taken.
• Order the filters in increasing or decreasing order based on
the poles closeness to the unit circle.
This will push down high internal resonance peaks.
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Well-Conditioned Parallel Realizations
Assume nr distinct real poles and nc distinct complex-pole pairs
Modal (a.k.a. diagonal/parallel/coupled) form:
zi ( k + 1) = λ i zi ( k) + β i y( k)
σi ωi
γ i1
vi ( k + 1) =
vi ( k) +
y( k)
γ i2
−ω i σ i
nc
nr
X
X
u( k) = D y( k) +
γ i zi ( k) +
δ iT vi ( k)
i =1
i =1
Matlab: sysm = canon(sys,’modal’)
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
i = 1, . . . , nr
i = 1, . . . , nc
Possible Pole Locations for Direct vs Modal Form
Pole positions with N=6 bits, modal form
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
Imag
Imag
Pole positions with N=6 bits, direct form
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
0.2
0.4
0.6
0.8
1
0
0
0.2
Real
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
0.4
0.6
Real
0.8
1
Short Sampling Interval Modification
In the state update equation
x( k + 1) = Φ x( k) + Γ y( k)
the system matrix Φ will be close to I if h is small. Round-off
errors in the coefficients of Φ can have drastic effects.
Better: use the modified equation
x( k + 1) = x( k) + (Φ − I ) x( k) + Γ y( k)
• Both Φ − I and Γ are roughly proportional to h
– Less round-off noise in the calculations
• Also known as the δ -form
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009
Short Sampling Interval and Integral Action
Fast sampling and slow integral action can give roundoff problems:
I ( k + 1) = I ( k) + e( k) ⋅ h/Ti
| {z }
(0
Possible solutions:
• Use a dedicated high-resolution variable (e.g. 32 bits) for the
I-part
• Update the I-part at a slower rate
General problem for filters with very different time constants
Graduate Course on Embedded Control Systems – Pisa 8-12 June 2009