Chapter 4: Discrete-time Fourier Transform (DTFT) 4.1 DTFT and its
advertisement
 4.1 DTFT and its")
Chapter 4: Discrete-time Fourier Transform (DTFT)
4.1 DTFT and its Inverse
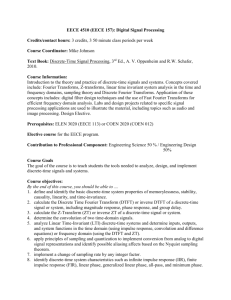
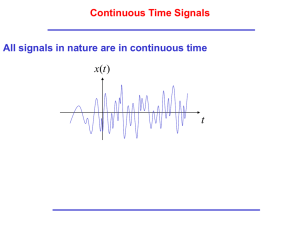
Forward DTFT: The DTFT is a transformation that maps Discrete-time (DT) signal x[n] into a complex valued
function of the real variable w , namely:
∞
X ( w) = ∑ x[ n]e − jwn , w ∈ ℜ
(4.1)
n = −∞
• Note n is a discrete-time instant, but w represent the continuous real-valued frequency as in the
continuous Fourier transform. This is also known as the analysis equation.
• In general X ( w) ∈ C
•
X ( w + 2n π ) = X ( w) ⇒ w ∈ {−π , π } is sufficient to describe everything.
•
X (w) is normally called the spectrum of x[n] with:
X ( w) =| X ( w) | .e j∠X ( w)
•
| X ( w) |: Magnitude Spectrum
⇒
∠ X ( w) : Phase Spectrum, angle
(4.2)
(4.3)
The magnitude spectrum is almost all the time expressed in decibels (dB):
| X ( w ) |dB = 20 . log 10 | X ( w ) |
(4.4)
Inverse DTFT: Let X (w) be the DTFT of x[n]. Then its inverse is inverse Fourier integral of X (w) in the
interval {−π , π ).
1 π
jwn
x[ n] =
(4.5)
∫ X ( w)e dw
2π −π
This is also called the synthesis equation.
π
Derivation: Utilizing a special integral: ∫ e jwn dw = 2πδ [ n ] we write:
−π
4.1
π
∫ X ( w)e
jwn
π
∞
dw = ∫ { ∑ x[ k ]e
− π k = −∞
−π
− jwk
}e
jwn
∞
π
∞
k = −∞
−π
k = −∞
dw = ∑ x[k ] ∫ e − jw[ n −k ] dw = 2π ∑ x[ k ]δ [ n − k ] = 2π .x[ n ]
Note that since x[n] can be recovered uniquely from its DTFT, they form Fourier Pair: x[ n] ⇔ X ( w).
∞
Convergence of DTFT: In order DTFT to exist, the series ∑ x[ n]e − jwn must converge. In other words:
n= −∞
M
X M ( w) = ∑ x[n ]e − jwn must converge to a limit X (w) as M → ∞.
n =−M
(4.6)
Convergence of X m (w) for three difference signal types have to be studied:
∞
• Absolutely summable signals: x[n] is absolutely summable iff ∑ | x[ n] | < ∞ . In this case, X (w) always
n= −∞
exists because:
∞
∞
∞
n = −∞
n = −∞
n = −∞
| ∑ x[ n]e − jwn | ≤ ∑ | x[n ] | . | e − jwn |= ∑ | x[n ] | < ∞
(4.7)
∞
• Energy signals: Remember x[n] is an energy signal iff E x ≡ ∑ | x[n ] | 2 < ∞. We can show that X M (w)
n = −∞
converges in the mean-square sense to X (w) :
π
Lim ∫ | X ( w) − X M ( w) | 2 dw = 0
M →∞
(4.8)
−π
Note that mean-square sense convergence is weaker than the uniform (always) convergence of (4.7).
• Power signals: x[n] is a power signal iff
N
1
2
Px = Lim
∑ | x[ n] | < ∞
N →∞ 2 N + 1 n = − N
• In this case, x[n] with a finite power is expected to have infinite energy. But X M (w) may still converge
to X (w) and have DTFT.
• Examples with DTFT are: periodic signals and unit step-functions.
•
X (w) typically contains continuous delta functions in the variable w.
4.2
4.2 DTFT Examples
Example 4.1 Find the DTFT of a unit-sample x[ n] = δ [ n].
∞
∞
n = −∞
n = −∞
X ( w) = ∑ x[ n]e − jwn = ∑ δ [ n]e − jwn = e − j 0 = 1
(4.9)
Similarly, the DTFT of a generic unit-sample is given by:
∞
DTFT{δ [ n − n 0 ]} = ∑ δ [ n − n 0 ]e − jwn = e − jwn0
(4.10)
n = −∞
Example 4.2 Find the DTFT of an arbitrary finite duration discrete pulse signal in the interval: N 1 < N 2 :
N2
x[ n] = ∑ c k δ [n − k ]
k = − N1
Note: x[n] is absolutely summable and DTFT exists:
∞
N2
N2
∞
N2
k = − N1
n = −∞
k = − N1
X ( w) = ∑ { ∑ c k δ [ n − k ]}e − jwn = ∑ c k { ∑ δ [n − k ]e − jwn } = ∑ c k e − jwk
n= −∞ k = − N1
(4.11)
Example 4.3 Find the DTFT of an exponential sequence: x[ n] = a n u[ n ] where | a |< 1 . It is not difficult to see
that this signal is absolutely summable and the DTFT must exist.
∞
∞
∞
1
X ( w ) = ∑ a n .u[ n ]e − jwn = ∑ a n .e − jwn = ∑ ( ae − jw ) n =
(4.12)
n = −∞
n =0
n =0
1 − ae − jw
Observe the plot of the magnitude spectrum for DTFT and X M (w) for: a = 0.8 and M = {2,5,10,20 , ∞ = DTFT}
4.3
Example 4.4 Gibbs Phenomenon: Significance of the finite size of M in (4.6).
For small M , the approximation of a pulse by a finite harmonics have significant overshoots and
undershoots. But it gets smaller as the number of terms in the summation increases.
Example 4.5 Ideal Low-Pass Filter (LPF). Consider a frequency response defined by a DTFT with a form:
1 | w |< w C
X ( w) =
(4.13)
0 w C < w < π
4.4
Here any signal with frequency components smaller than wC will be untouched, whereas all other frequencies
will be forced to zero. Hence, a discrete-time continuous frequency ideal LPF configuration.
Through the computation of inverse DTFT we obtain:
wC
w n
1 wC jwn
x[ n] =
Sinc( C )
∫ e dw =
2π − wC
π
π
(4.14)
sin( πx)
where Sinc( x ) =
. The spectrum and its inverse transform for wC = π / 2 has been depicted above.
πx
4.3 Properties of DTFT
4.3.1 Real and Imaginary Parts:
x[ n] = x R [ n] + jx I [ n]
4.3.2 Even and Odd Parts:
x[ n] = x ev [n ] + x odd [ n]
⇔
X ( w ) = X R ( w) + jX I ( w )
(4.15)
⇔
X ( w ) = X ev ( w ) + X odd ( w)
(4.16a)
*
x ev [ n] = 1 / 2.{x[n ] + x * [ −n ]} = x ev
[ −n ] ⇔
X ev ( w ) = 1 / 2 .{ X ( w ) + X * [ − w ]} = X
*
ev
[− w]
*
*
x odd [ n ] = 1 / 2 .{x[ n ] − x * [ − n]} = − x odd
[ − n] ⇔ X odd ( w ) = 1 / 2 .{X ( w) − X * ( − w)} = − X odd
( − w)
4.3.3 Real and Imaginary Signals:
If x[n] ∈ ℜ then X ( w) = X * ( −); even symmetry and it implies:
4.5
(4.16b)
(4.16c)
| X ( w) =| X ( − w) |; ∠X ( w) = −∠ X ( − w)
X R ( w ) = X R (− w ); X I ( w) = − X I ( − w)
(4.17a)
(4.17b)
If x[n] ∈ ℑ (purely imaginary) then X ( w ) = − X * ( − w) ; odd symmetry (anti-symmetry.)
4.3.4 Linearity:
a. Zero-in zero-out and
b. Superposition principle applies: A.x[n ] + B. y[n ] ⇔
4.3.5 Time-Shift (Delay) Property:
x[ n − D ] ⇔ e − jwD . X ( w )
4.3.6 Frequency-Shift (Modulation) Property:
X [ w − wC ] ⇔ e − jwC n .x[ n]
A.X ( w) + B. X ( w)
(4.18)
(4.19)
(4.20)
Example 4.6 Consider a first-order system:
y[ n] = K 0 .x[ n] + K 1 .x[ n − 1]
Then Y ( w) = ( K 0 + K 1 .e − jw ) X ( w ) and the frequency response:
H ( jw ) = Y ( w) / X ( w) = K 0 + K 1 .e − jw
4.3.7 Convolution Property:
x[ n] * h[ n ] ⇔
(4.21)
X ( w).H ( w)
4.3.8 Multiplication Property:
x[ n]. y[ n] ⇔
1 π
∫ X (φ ).Y ( w − φ ) dφ
2π −π
(4.22)
4.3.9 Differentiation in Frequency:
j.
dX ( w)
⇔ n.x[ n ]
dw
(4.23)
4.6
4.3.10 Parseval’s and Plancherel’s Theorems:
1 π
2
∑ | x[ n ] | =
∫ | X ( w) | dw
n= −∞
2π −π
∞
2
(4.24)
If x[n] and/or y[n] complex then
∞
∑ x[ n ]. y * [n ] =
n= −∞
1 π
*
∫ X ( w).Y ( w)dw
2π −π
(4.25)
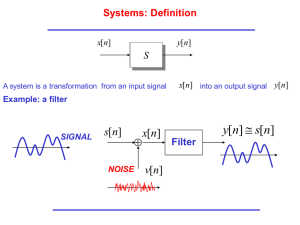
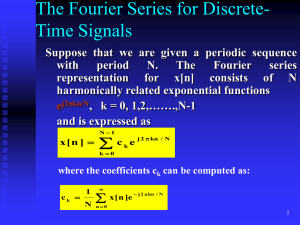
Example 4.7 Find the DTFT of a generic discrete-time periodic sequence x[n].
Let us write the Fourier series expansion of a generic periodic signal:
N −1
2π
x[ n] = ∑ a k e jkw0n where w0 =
k =0
N
N −1
N −1
N −1
k =0
k =0
k =0
X ( w) = DTFT{x[n ]} = DTFT{ ∑ a k e jkw0 n ) = ∑ a k .DTFT{e jkw0n ) = ∑ a k .2πδ ( w − kw0 )
(4.26)
Therefore, DTFT of a periodic sequence is a set of delta functions placed at multiples of kw 0 with heights a k .
4.4 DTFT Analysis of Discrete LTI Systems
The input-output relationship of an LTI system is governed by a convolution process:
y[ n] = x[ n] * h[n ] where h[n] is the discrete time impulse response of the system.
Then the frequency-response is simply the DTFT of h[n] :
∞
H ( w) = ∑ h[ n].e − jwn , w ∈ ℜ
(4.27)
n = −∞
4.7
• If the LTI system is stable then h[n] must be absolutely summable and DTFT exists and is continuous.
• We can recover h[n] from the inverse DTFT:
h[ n] = IDTFT{H ( w)} =
1 π
jwn
∫ H ( w).e dw
2π −π
(4.28)
• We call | H ( w) | as the magnitude response and ∠H (w) the phase response
Example 4.8 Let
1
1
h[ n] = ( ) n .u[n ] and x[ n] = ( ) n .u[ n ]
2
3
Let us find the output from this system.
1. Via Convolution:
∞
1
1
y[ n] = x[ n] * h[ n ] = ∑ ( ) k .u[k ].( ) n −k .u[n − k ] ⇒ Not so easy.
k = −∞ 3
2
2. Via Fast Convolution or DFTF from Example 4.3 or Equation(4.12):
1
1
H ( w) =
and X ( w) =
1
1
1 − e − jw
1 − e − jw
2
3
1
3
2
Y ( w) = X ( w).H ( w) =
=
−
1
1
1
1
(1 − e − jw ).(1 − e − jw ) 1 − e − jw 1 − e − jw
3
2
2
3
and the inverse DTFT will result in:
1
1
y[ n] = 3( ) n .u[ n] − 2 ( ) n .u[ n]
2
3
Example 4.9 Causal moving average system:
1 M −1
y[ n] =
∑ x[ n − k ]
M k =0
If the input were a unit-impulse: x[ n] = δ [ n] then the output would be the discrete-time impulse response:
4.8
1 M −1
1 / M 0 ≤ n < M
1
= (u[ n] − n[n − M ])
∑ δ [n − k ] =
M k= 0
Otherwise M
0
The frequency response:
1 M −1 − jwn 1 e − jwM − 1 1 e − jwM / 2 e − jwM / 2 − e jwM / 2 1 − jw ( M −1) / 2 sin( wM / 2)
H ( w) =
=
=
= .e
.
∑ e
M n=0
M e − jw − 1 M e − jw / 2 e − jw / 2 − e jw / 2
M
sin( w / 2)
h[ n] =
For M=6 we plot the magnitude and the phase response of this system:
Notes:
1. Magnitude response Zeros at w =
2πk
M
where
sin( wM / 2 )
=0
sin( w / w)
2. Level of first sidelobe ≈ −13 dB
3. Phase response with a negative slope of − ( M − 1) / 2
sin( wM / 2)
2πk
4. Jumps of π at w =
where
changes its sign.
M
sin( w / w)
4.9
TABLE: 4.1 DISCRETE-TIME FOURIER TRANSFORM PAIRS
Signal
DTFT
δ [n]
1
1
2π .δ ( w)
e jwC n
2π .δ ( w − wC )
N −1
jkw n
∑ a k .e C
k =0
with
a n .u[n ]; | n |< 1
NwC = 2π
N −1
∑ 2π .a k .δ ( w − kwC )
k =0
1
1 − a.e − jw
a | n| .; | n |< 1
1− a2
1 − 2 a. cos w + a 2
n.a n .u[ n ]; | n |< 1
a.e − jw
(1 − a.e − jw ) 2
rect [
n
]
N
sin wC n
πn
sin[ w( N + 1 / 2)]
sin[ w / 2]
rect [ w / 2 w C ]
4.10
TABLE 4.2 PROPERTIES OF DTFT
1. Linearity
A.x1 [n ] + B.x 2 [ n]
A. X 1 ( w) + B.X 2 ( w)
2. Time-Shift (Delay)
x[n − N ]
e − jwN . X ( w )
3. Frequency-Shift
x[ n].e jwC n
X (w − wC )
4. Linear Convolution
x[ n] * h[ n]
X ( w).H ( w)
5. Modulation
x[n ]. p[ n ]
1
2π
6. Periodic Signals
x[ n] = x[ n + N ]
∫ X (η ). H ( w − η )d η
< 2π >
∞
∑ 2π .a k .δ ( w − kwC )
k = −∞
wC =
2π
N
ak =
1
− jkw n
∑ x[n ].e C
N <N >
Example 4.10 Response of an LTI system with H ( w) = DTFT{h[n ]} : Given x[ n] = e jwn ; a complex harmonic.
y[ n] = ∑ h[ k ].x[n − k ] = ∑ h[ k ].e jw ( n− k ) ={∑ h[ k ].e − jwk }.e jwn = H ( w). x[ n]
k
k
(4.29)
k
Note that this is the ONLY time frequency-domain variable w and the time-domain variable n appear on the
same side of the equation. In all other cases, we have time domain variable in the time-domain and vice
versa. In calculus jargon, e jwn acts as the Eigenvector of the system.
4.11
4.5 FREQUENCY-SELECTIVE DISCRETE-TIME FILTERS
4.5.1 Ideal Low-Pass and High-Pass Filters
if | w |< wC
1
H LP ( w) =
0 if w C <| w |< π
h LP [ n ] =
if | w |< w C
0
H HP ( w ) =
1 if wC <| w |< π
wC
w n
.Sinc( C )
π
π
h HP [ n ] = δ [n ] − h LP [ n] = δ [ n ] −
(4.30a-d)
wC
w n
.Sinc( C )
π
π
4.5.2 Ideal Band-Pass and Band-Stop Filters
1 if | w − wC |< B / 2
H BP ( w) =
0 elsewhere in ( −π , π )
h BP [ n ] = 2 . cos( w C n ). h LP [ n ]
wC = B / 2
0 if | w − wC |< B / 2
H BS ( w) =
1 elsewhere in (−π , π )
(4.31a-d)
h BS [ n ] = δ [n ] − h BP [n ] = δ [ n] − 2 . cos(wC n).hLP [n ] w
C =B /2
4.12
• All of these ideal filters are non-causal and hence, non-realizable.
• They form benchmark for implementable real-life filters.
4.6 Phase delay and group delay
Consider an integer system, for which the input-output relationship is given by:
y[ n] = x[ n − k ], k ∈ Integer
The frequency response is computed:
Y ( w)
Y ( w) = e − jwk . X ( w) ⇒ H ( w) ≡
= e − jwk
X ( w)
The phase response of this system:
∠H ( w) = − wk
is a linear function of the frequency variable w.
Phase delay τ PH is defined by:
∠H ( w)
τ PH ≡ −
w
For integer systems, this simplifies to:
∠H ( w)
−
=k
w
(4.32a)
(4.32b)
(4.33)
(4.34)
Group Delay is more meaningful and defined by:
d ∠H ( w)
τG ≡ −
(4.35)
dw
It is useful for dealing with narrow-band input signal x[n] is centered around a carrier frequency w0 .
x[ n] = s[ n].e jw0 n
where s[n] is a slowly-varying envelope. Typical digital communication task, as shown below.
4.13
The corresponding system output is approximated by:
y[ n] ≈| H ( w 0 ) | .s[ n − τ G ( w)].e jw0 [ n −τ PH ( w0 )]
(4.36)
It is easy to see that the phase delay τ PH contributes a phase shift to the carrier e jw 0 n , whereas the group
delay τ G causes a delay to the envelope s[n].
4.14
Pure delay, or All-Pass Filter:
When a system is a pure delay; i.e., its magnitude response is unity for all w and the phase is a linear
function of the delay τ .
| H ( w) |= 1 τ PH ( w) = τ G ( w) = 1
(4.37)
If the phase is linear but the magnitude may depend on w , then the system is labeled as a linear Phase
system:
H ( w) =| H ( w ) | .e j ∠H ( w)
(4.38a)
where
∠H ( w) = − wτ
(4.38b)
where the phase is a linear function of w with a slope − τ .
4.15

![It is possible to express the spectrum X[w] directly in terms of its](http://s3.studylib.net/store/data/005883349_1-de53a6b45bc04bb630bcf2391414467e-300x300.png)