ANALYSIS OF THE CPDLC REAL TIME CHARACTERISTICS

Sitraer 7 (2008) 92-99 – Tr. 310
ANALYSIS OF THE CPDLC REAL TIME CHARACTERISTICS AND THE MODE S
DATA LINK CAPACITY
Fernando de Oliveira Gil
Lúcio Flávio Vismari
João Batista Camargo Júnior
Universidade de São Paulo
Escola Politécnica
RESUMO
O Controller-Pilot Data Link Communications (CPDLC) é uma das aplicações da Aeronautical
Telecommunications Network (ATN) que compõe o CNS/ATM. Este sistema possibilita a comunicação controlador-piloto através de um enlace digital de dados. Para ser um substituto da comunicação via voz, um sistema CPDLC precisa respeitar determinados requisitos de segurança e tempo. Neste trabalho, foi conduzida uma análise dos requisitos de tempo real do CPDLC bem como as recomendações das autoridades internacionais. O atraso em cada subsistema foi analisado e o impacto do enlace de dados foi detalhado. O enlace de dados Modo S do SSR foi escolhido para se realizar uma estimativa do limite superior da capacidade do sistema. Apesar de ser necessário o estudo de outros cenários para uma análise de segurança, este artigo contribui com uma abordagem inicial do assunto.
ABSTRACT
The Controller-Pilot Data Link Communications (CPDLC) is an Aeronautical Telecommunications Network
(ATN) application that is part of the CNS/ATM concept. This system enables the controller-pilot communication over a digital data link. For the voice communication replacement, a CPDLC system has to respect their safety and time requirements. On this work, a real time analysis of the CPDLC was conducted and the recommendations from the international authorities were studied. The delay on each subsystem was evaluated and the impact of the data link was detailed. The SSR Mode S data link has been selected to the estimation of the upper capacity of the system. Although different sceneries are required to a safety assessment, this paper contributes with an initial approach of the subject.
1. INTRODUCTION
The CNS/ATM concept introduces a set of new technologies and management methodologies to improve the air transport safety and flow. In the communication field, the main improvement is the replacement of the voice communication by the digital messages over a data link. The CPDLC is the CNS/ATM application that will enable pilot-controller communications over an ATN data link. There are many issues on using a digital text message instead, from cognitive to time problems.
A fundamental part of the ATN is the data link layer. This layer is responsible for connecting the airborne systems to the ground systems. Nowadays there are many data link protocols that can be used as an ATN layer. The Secondary Surveillance Radar provides data link functionality with their Mode S subnetwork.
This work will focus in the time requirements of the CPDLC and will explore the Mode S applicability on this application.
2. THE CPDLC APPLICATION
The Controller-Pilot Data Link Communications (CPDLC) is an application of the
Aeronautical Telecommunications Network (ATN). According to ICAO (1999), this application allows data link communication between controllers and pilots. The CPDLC is part of the technologies used in the CNS/ATM concept.
92
Sitraer 7 (2008) 92-99 – Tr. 310
This system is responsible for establish, manage and terminate a CPDLC communication between the ATS in the ground and aircraft systems in the air. Also, the CPDLC can deal with dialogs between two different ground services, working as a message forwarder.
In the short term, this application will replace the actual voice communication over analog channels. This replacement has some advantages. The understanding of a text message is greater than of a voice message, especially if the voice message has poor audio quality. The messages could be translated to any language automatically. The messages could be printed or read again without the need of retransmission. The communication could be send only to desired destinations. The binary messages are faster to transmit than the voice messages.
Because of this, the digital messages occupy less channel time, increasing the channel capacity.
By the way, there are some problems that should be addressed before the full adoption of that system. The messages have to be delivered before a certain amount of time. Of course, this amount depends in which phase and airspace is the flight. So, the system must be prepared to these time restrictions. Some works argue that the pilot will loose the situational awareness because he or she will not receive messages addressed to adjacent pilots. Other issue is the increment of the mental work when the crew does all the functions with the sight sense, leaving the hearing sense unused.
In the long term, the application will can send instructions directly to the airborne systems, reducing the pilots mistakes when they manually input the information on the navigation systems and reducing the misunderstandings. Also, the controllers could have faster and more accurate information about the flight, as the system could send automatic reports from the aircraft.
The ICAO (1999) specification defines a message set of the CPDLC system. There are more than 200 messages in the list, however, these messages reflects the original voice communication procedures and could be grouped for a better understanding. The CPDLC does not have the objective of transport position information. This functionality is covered by the ADS application. The Table 1 summarizes the CPDLC message types for the message exchange function of the system.
Table 1: The CPDLC message types general information exchange delivery clearance request response altitude/identity surveillance monitoring of current/planned position advisories request delivery system management functions emergency situations
The message length varies from 1 octet, for simple response messages, to a maximum around
1607 octets, for complex clearance instructions. By the way, most of the downlink messages have approximately 13 octets while the uplink ones have approximately 45 octets. The rate of messages depends of many factors, including the operational domain (terminal, en-route,
93
Sitraer 7 (2008) 92-99 – Tr. 310 oceanic), the number of aircrafts in the system, how much of the communication is done by voice and how much is done by CPDLC, ground-to-ground connectivity, level of automation among others (ICAO 1999).
The CPDLC is the main ATN application responsible for the communication between pilots and controllers in the CNS/ATM paradigm. There are some advantages in using this technology, but there are some problems that need to be studied, like the time requirements presented on this work.
3. TIME REQUIREMENTS
For the controller communications purpose, the delay to deliver a message is critical. Because of this, the time requirement specifies how long a pilot, or a controller, can wait for a message.
In communication systems, the usual time requirements are the delay of a message and the variation of this delay along a message series, called jitter. In the case of controller-pilot communication, the total delay is the most important thing, as the message is text based instead of voice based.
In the CPDLC system, the message goes trough many subsystems that will be explained on
Section 4, so the transmission could be delayed differently on each part. But, for an application view, the total delay must be respected. Therefore, the ICAO defines a set of
ATSC classes that specifies the maximum delay allowed to an ATN route. A CPDLC system must declare your ATSC Class and have to use ATN routes according to this class.
The ICAO transit delay for each ATSC Class has been defined in ICAO (1999) and are showed on Table 2. Note that this ATN delays represents approximately 90% of the total endto-end transit delays, which mean that if a CPDLC system is defined as an ATSC Class C service, the maximum transit delay allowed is 8 seconds, for the whole system. Note that these times are for 95% of the transmissions.
Table 2: Transit delays for ATSC Classes
Maximum One way
ATN End-to-End
Transit Delay at 95% probability (seconds)
Reserved
4.5
7.2
13.5
18
27
50
100
No value specified
ATSC Class
A
B
C
D
E
F
G
H
No preference
The FAA defined ATSC Classes for its CPDLC systems based on these ICAO recommendations. The Table 3 shows the end-to-end transit delays for the different flight phases and percentiles adopted by FAA. As expected, the delays are shorter for terminal
94
Sitraer 7 (2008) 92-99 – Tr. 310 areas. Because of the proximity of the aircrafts, controllers need a faster interaction with the pilots.
Domain
Terminal
En-route
Table 3: FAA delays for CPDLC messages
Mean
5
10
End-to-End Delay (s)
95 percentile
8
15
99.996 percentile
12.5
22
4. ARCHITECTURE
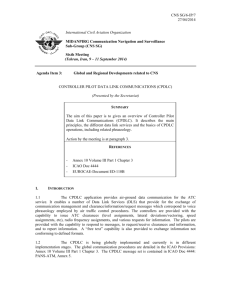
The architecture presented here is a modification of the CPDLC architecture showed in (FAA
1998). This scenery will be used to evaluate the data link protocol in the Section 6.
A CPDLC system is composed by ground and airborne equipments. In the ground, there is a man-machine interface (MMI) from where the air traffic controller could dispatch and receive the messages. In the air traffic facility, there is an internal ground network that routes the messages to a communication manager. The communication manager sends the message to a communication server that sends through the data link to the aircraft.
As the message is received by the plane system, it is decoded and goes to a cockpit panel, usually the same from the FMS.
The controller’s MMI is responsible to give the controller the ability to write, send, receive and answer the messages. As the messages are predefined, the MMI shows only the possible messages for each occasion. The controller selects the message, specifies the arguments and sends it to the pilot.
Inside an air traffic facility, there is a ground network, usually a wired network that connects the different computers of the air traffic controlling system. This network has many functions, one of that is to transport the CPDLC messages on the ground, up to the device that will transmit the message through the wireless link.
The communication manager is a server connected to the ground network responsible of controlling the message flow between controllers and pilots. This server manages the flow and executes the CPDLC protocol. When a message is received, the communication manager checks the validity of the message in the context and then sends it to the communication server. In the abstract concept (ICAO 1999), the communication manager acts as the CPDLC
Application Service Element.
The communication server represents a device that is capable to send and receive messages through the data link. This server does not know what is the content or the context of the message, but only needs to know in which channel the message have to be transmitted. The communication manager and the communication server could be a single physical machine, but in this work we will consider both separately.
The data link is the physical layer that has a wireless connection with the aircraft. As it is the object of study, it will be detailed in the later sections. The data link consists in a protocol for exchange messages in the radio frequency and on the physical media.
The embedded system could be divided in two parts: the communication module and the pilot's MMI. The communication module handles the reception and transmission of the
95
Sitraer 7 (2008) 92-99 – Tr. 310 messages. The MMI displays the received messages to the pilots and provides the interface for responses. This system could be linked with the FMS to input the instructions on the flight system automatically. The Figure 1 shows the described architecture.
Figure 1: The CPDLC Architecture
5. POSSIBLE DATA LINK PROTOCOLS
There are many data link protocols that can be used in the ATN systems. For the communication between airborne systems and the ground systems, some of these protocols could be used. Each protocol is better for a kind of application, while having specific media access technique and different bandwidth.
The VHF Data Link (VDL) protocols are based on actual VHF frequencies allocated for aviation communication radio. They implement a digital data link using this frequencies aiming to reduce the transition problems, because they can share the VHF channels between the analog voice systems and the digital systems.
The VDL mode 2 is a non-deterministic protocol that uses the Carrier Sense Multiple Access
(CSMA) technique over a 25kHz channel. This protocol needs a channel of separation between two channels in use, resulting in an occupation of 50kHz per channel. It has a nominal bandwidth of 31.5kbps on each channel but its net capacity is only 4kbps. Nowadays this protocol is used in many CPDLC systems, like in the South Atlantic airspace.
On the other hand, the VDL Mode 3 is a deterministic protocol using a time division multiple access scheme (TDMA). This protocol allows a division of the 25kHz channel on 4 subchannels. Each sub-channel can be a voice channel or a data channel. Usually, it is used with
3 data channels and 1 voice channel. In this configuration, it has a net bandwidth of 12.4kbps.
The VDL Mode 4 is another TDMA protocol. It allows a net bandwidth of 14kbps. A TDMA
96
Sitraer 7 (2008) 92-99 – Tr. 310 protocol needs a way to control the users’ access to the media. Usually this control is implemented on a ground facility, but this protocol does not require ground coordination, permitting air-air communications without ground assistance.
The Universal Access Transceiver is a satellite based technology. This protocol operates in the 978MHz band and could have a capacity of 1Mbps. It is a hybrid of deterministic and non-deterministic protocol that can be used for broadcast applications. Nowadays it is under development (ICAO 2005).
The Secondary Surveillance Radar (SSR) has the data link capability with its Mode S. This protocol is non-deterministic and uses a CSMA technique. The protocol has a nominal bandwidth of 1Mbps for downlink and 4Mbps for uplink. Because of the fact that the SSR is already installed in many ground facilities, it has a potential to be a very used data link.
6. THE SSR MODE S DATA LINK
The SSR is a technology that supports many applications. The primary use of the SSR is for surveillance. With an interrogator, on the ground, and a transponder, on the aircraft, the SSR permits the display of the aircraft's altitude on the controller's console. The transponder is also used in the TCAS, enabling a collision avoidance system.
There are 4 modes of interrogation in the SSR system: Mode A, Mode C, Mode S and intermode (ICAO 2004). The Mode S is selective interrogation mode that has the data link capability. This mode can send an interrogation to a specific aircraft, with some data in the packet, configuring an uplink transmission. On the other side, the aircraft can reply that interrogation with a data packet, doing a downlink transmission. This is the way that SSR
Mode S can be used to implement a data link layer.
For interrogation (uplink) transmissions, the SSR uses the 1030MHz frequency. While for reply (downlink), it uses the 1090MHz frequency. The Mode S uses a CSMA media access technique, which leaves the system with a non-deterministic delay for each communication.
Note that these frequencies are shared among all the SSR modes, and consecutively by all the
SSR application too. The use of this band for the CPDLC could degrade the performance of the actual critical application, like surveillance and collision & avoidance, so your use has to be evaluated carefully.
From the network point of view, the Mode S is a subnetwork of the ATN. It implements an air-ground data link with a connection-oriented service. To access the services provided by this subnetwork, the ISO8208 stack is utilized, which is the X.25 topology. As the same radio channel is used for all Mode S facilities, the system can handle hand-offs transparently (ICAO
1999). The X.25 stack permits the interoperability with ground networks and the transmission of any kind of data load. Also, the ISO8208 has 2 priorities for a packet: high and low. It is an interesting feature when dealing with CPDLC, because different ATSC Classes could use different priorities in the data link layer.
The Mode S subnetwork has 4 types of packets. For uplink there are the Comm-A and
Comm-C packets. For downlink there are the Comm-B and Comm-D. The Comm-A/C uses the Simple Length Message (SLM) that can carry 56 bits of data. The Comm-B/D are used for transmit 80 bits per packet, in the Extended Length Message (ELM).
As explained here, the SSR Mode S data link has the functional requirements for a controller-
97
Sitraer 7 (2008) 92-99 – Tr. 310 pilot communication application, allowing data packets to be transmitted between ground and air systems. However, the performance requirements should be studied to meet the application's needs.
7. MODE S CAPACITY ANALYSIS
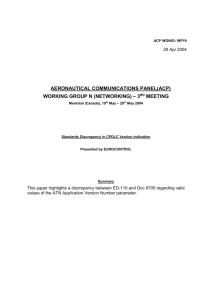
Considering an en-route airspace with an ASTC Class D service, which is according to FAA recommendations, 95% of the messages have to be delivered before 15 seconds. With the architecture presented on Section 4 and using the delays specified in (FAA 1998), the Mode S data link could have a maximum delay of 6.2 seconds. The Figure 2 shows the delays for the subsystems.
The Mode S subnetwork has a nominal uplink rate of 4Mbps and a downlink rate of 1Mbps.
However, considering the ELM frame, which has a length of 112 bits, only 80 can be used for data. According to (Garcia M. et al 2007) the ELM packet has a length of 32.5µs on the uplink. Therefore, the protocol allows a rate of 30769 ELM packets per second. As each ELM packet carries 80 bits, this lead to a net capacity of 2396kbps for uplink. The same idea could be applied to the downlink, which has an ELM length of 120µs leading to a rate of 651kbps.
Airborne Systems
2*
+
Mode S
6.2*
Controller ’ s Communication
MMI
1.1*
+
Manager
3.5*
+
Ground
Network
2.2*
+
0 1.1 4.6 6.8
* Time in seconds;
+
Extracted from (FAA 1998).
13 15
Figure 2: Delay for each subsystem
As explained in Section 2, the CPDLC has a message size of approximately 13 bytes (104 bits) for downlink and 45 bytes (360 bits) for uplink. These messages sizes must fit inside the
ELM packets. Therefore an uplink message will occupy 5 packets while a downlink will need only 2 packets. Hence, a Mode S subnet could have a throughput of 4166 CPDLC downlink messages and 6133 uplink messages. The Table 4 summarizes these rates.
98
Sitraer 7 (2008) 92-99 – Tr. 310
Direction uplink downlink
CPDLC message size
(bit)
360
104
Table 4: Message rates
Mode S net transfer rate
(kbps)
2396
651
ELM packets per message
5
2
True CPDLC size (bit)
400
160
Total CPDLC message rate
(messages/s)
6133
4166
In a CSMA protocol, collisions could happen and some data needs retransmission. For safety reasons, on this work was considered a collision probability of 50%. In addition, the SSR is already used for other critical applications. Therefore, the data link should use at most 10% of the channel (ICAO 2004). With these restrictions, the possible transfer rate is 5% of the total
CPDLC message rate, which is 306 uplink and 208 downlink messages.
The CPDLC has packets of acknowledgment (ACK) for all messages in the message exchange service, though the bandwidth of the system is limited by the lower message rate, i.e. 208 messages per second. With this limit, inside a 6.2 seconds window the Mode S data link can accommodate a maximum of 1280 aircrafts. Note that this is an upper limit, and the real capacity of the system can be lower in certain conditions. For a safety assessment a more detailed analysis is needed.
8. CONCLUSIONS
This work presented the time requirements of the CPDLC, an ATN application for the controller-pilot communications. The ICAO established recommendations to the delays allowed for the message exchange and the aeronautical authorities set limits for different flight phases and domains.
It was possible to estimate the upper limit of the Mode S subnetwork for a CPDLC application, based on a general architecture and for an en-route flight. Nevertheless, the impact of the CPDLC introduction on the SSR service should be studied carefully, since the
SSR is currently used by other critical applications (surveillance and collision & avoidance).
REFERENCES
FAA (1998) FAA CPDLC Specification Build-IA . Federal Aviation Administration.
Garcia M. et al (2007) Test for Success: Next Generation Aircraft Identification System RF Simulation.
Integrated Communications, Navigation and Surveillance Conference, 2007. ICNS '07 . 1-10
ICAO (1999) Manual of Technical Provisions for the Aeronautical Telecommunication Network (ATN) .
International Civil Aviation Organization.
ICAO (2004) Manual on the Secondary Surveillance Radar (SSR) Systems . International Civil Aviation
Organization.
ICAO (2005) Standards and Recommended Practices for the Universal Access Transceiver (UAT) Draft
Revision 5.0
. International Civil Aviation Organization.
99