Fundamental of Control Systems
– Steady State Error
Lecturer:
Dr. Wahidin Wahab M.Sc.
Aries Subiantoro, ST. MSc.
Electrical Engineering Department
University of Indonesia
2
Steady State Error
How
well can a system track a standard input
¾step, ramp, parabola
¾based on final value theorem of Laplace
Transforms
Steady state value of e( t ) is
e(∞) = lim {e( t )} = lim {sE ( s)}
t →∞
s→ 0
Table 7.1
Test waveforms
for evaluating
steady-state
errors of
position control
systems
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.2
Steady-state error:
a. step input;
b. ramp input
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
5
Steady State Error
Consider
a unity feedback system
¾note that any closed loop system may be
reduced to a unity gain system
R(s)
+
E(s)
-
C(s)
G(s)
6
Steady State Error
R(s)
+
E(s)
-
C(s)
G(s)
Steady state error ess = lim {sE ( s)}
s→ 0
C ( s ) E ( s) + R ( s )
G ( s)
=
=
1 + G ( s)
R ( s)
R ( s)
1
E ( s)
G ( s)
→
=
−1=
1 + G ( s)
R ( s) 1 + G ( s )
7
Steady State Error
R(s)
+
E(s)
-
G(s)
C(s)
E ( s)
1
1
=
→ E ( s) = R ( s ) ⋅
R ( s) 1 + G ( s )
1 + G ( s)
⎧ sR ( s) ⎫
∴ ess = lim ⎨
⎬
s→ 0⎩1 + G ( s) ⎭
8
Error Constants
Error
constants give figure of merit for
steady state error
The bigger the error constant, the better
the steady state error
tracking of input signal defined in terms
of response to standard inputs
¾step (position), ramp(velocity),
parabola(acceleration)
9
System types
Systems
classified into how many open
loop poles lie at the origin
e.g. type 0 open loop systems have no
poles at the origin, type 1 systems have
one pole at the origin, and so on
10
Static Position Error Constant
The steady state error of a unity feedback system for a
unit step input is
1
1⎫
1
⎧
ess = lim ⎨s ⋅
⋅ ⎬=
s → 0 ⎩ 1 + G ( s) s ⎭ 1 + G ( 0 )
Define static position error constant
K p = lim {G ( s)} = G ( 0)
s→ 0
11
Static Position Error Constant
1
→ ess =
1 + Kp
Note for a type 0 system K p is finite, → ess is finite
for a type 1 or higher system it is infinite
→ ess is zero
If zero steady state error is required for a step input
a first or higher order system is needed.
12
Static Velocity Error Constant
Steady state response fo system to unit ramp input
1
1⎫
⎧ 1 ⎫
⎧
ess = lim ⎨s ⋅
⋅ 2 ⎬ = lim ⎨
⎬
s→ 0⎩ 1 + G ( s) s ⎭ s→ 0⎩ sG ( s) ⎭
Define static velocity error constant
K v = lim {sG ( s)}
s→ 0
1
→ ess =
Kv
13
Static Velocity Error Constant
For a type 0 system K v = 0 → ess is infinite
Type 1 system K v is finite → ess is finite
Type 2 or higher system K v is infinite → ess is zero
Static Acceleration Error
Constant
Steady state response fo system to unit parabola input
⎧ 1 ⎫
1
1⎫
⎧
⋅ 3 ⎬ = lim ⎨ 2
ess = lim ⎨s ⋅
⎬
s → 0 ⎩ 1 + G ( s) s ⎭ s → 0 ⎩ s G ( s ) ⎭
Define static acceleration error constant
{
s→ 0
}
K a = lim s G ( s)
1
→ ess =
Ka
2
14
Static Acceleration Error
Constant
For a system types 0 &1 K a = 0 → ess is infinite
Type 2 system K a is finite → ess is finite
Type 3 or higher system K v is infinite → ess is zero
15
Figure 7.5
Feedback
control system for
Example 7.2
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.6
Feedback
control system for
Example 7.3
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.8
Feedback control
system for defining
system type
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.10
Feedback
control system
for Example 7.6
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Table 7.2
Relationships between input, system type, static error
constants, and steady-state errors
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Steady State Error - A
Summary
SYSTEM TYPE Step Input
1
0
1 + Kp
1
2
0
0
Ramp Input
∞
21
Parabolic Input
∞
1
Kv
∞
0
1
Ka
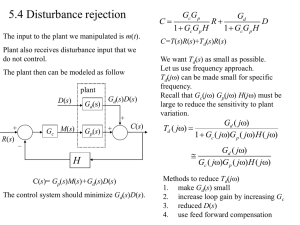
Figure 7.11
Feedback control
system showing
disturbance
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.13
Feedback control system for
Example 7.7
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.14
System for skill-Assessment
Exercise 7.4
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.15
Forming an
equivalent
unity feedback
system from a
general nonunity
feedback system
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.16
Nonunity feedback
control system for
Example 7.8
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.17
Nonunity feedback
control system with
disturbance
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
Figure 7.18
Nonunity feedback
system for
Skill-Assessment
Exercise 7.5
Control Systems Engineering, Fourth Edition by Norman S. Nise
Copyright © 2004 by John Wiley & Sons. All rights reserved.
29
Example 1
Taken
from Ogata, p287
Consider liquid level control system.
Determine the steady state effect of
disturbance of size D0 if proportional
control is used and alternatively if
integral control is used.
30
Example 1
Block Diagram
D(s)
X(s)
+
E(s)
-
controller
Gc(s)
G(s)
G(s)
++
Disturbance
H(s)
31
Example 1
R
G ( s) =
,
RCs + 1
⎧K p Proportional control
⎪
Gc ( s) = ⎨ K
Integral control
⎪⎩ s
D0
Disturbance D ( s) =
s
32
Example 1
Taking variation in setpoint as zero X( s) = 0
K pR
R
→ H ( s) =
E ( s) +
D ( s)
RCs + 1
RCs + 1
K pR
R
∴ E ( s) = − H ( s ) = −
E ( s) −
D ( s)
RCs + 1
RCs + 1
33
Example 1
R
→ E ( s) = −
D ( s)
RCs + 1 + K p R
D0
D ( s) =
s
D0
R
→ E ( s) = −
⋅
RCs + 1 + K p R s
34
Example 1
⎞
⎛
⎟
RD0 ⎜
RD0 1
1
⎟−
⎜
→ E ( s) =
⋅
1 + K pR⎟ 1 + K pR s
1 + K pR ⎜
s+
⎝
RC ⎠
RD0
e( ∞ ) = lim {sE ( s)} = −
s→ 0
1 + K pR
To get good steady state error need high value of Kp
35
Example 1
K
if controller is integral Gc ( s) =
s
Rs
E ( s) = −
D
s
(
)
RCs2 + s + KR
D0 ⎫
Rs
⎧
=
0
→ e(∞) = lim {sE ( s)} = lim ⎨− s
⎬
s→ 0
s→ 0 ⎩
RCs 2 + s + KR s ⎭
Integrator eliminates steady state error due to
step disturbance
Homeworks
Ogata Chapter
Nise chapter 7: 4, 12,16, 35, 38, 45