Lecture Notes - Cedar Crest College
advertisement

Auburn University
Calculus II
Lecture Notes
E-Mail Address:
jmh0036@auburn.edu
Author:
James Hammer
January 10, 2015
Preface
This is meant as a teaching aid. It can be freely distributed and edited in any
way. For a copy of the LATEX document, please email the author. These notes
are adapted from James Stewart’s Calculus: Early Transcendentals Seventh
Edition.
ii
Contents
11 Sequences and Series
11.0 Prepositional Logic . . . . . . . . . . . . . .
11.1 Sequences . . . . . . . . . . . . . . . . . . .
11.2 Series . . . . . . . . . . . . . . . . . . . . . .
11.3 The Integral Test . . . . . . . . . . . . . . .
11.4 The Comparison Test . . . . . . . . . . . . .
11.5 Alternating Series . . . . . . . . . . . . . . .
11.6 Absolute Convergence, Ratio, & Root Test .
11.7 Strategies for Testing Series . . . . . . . . .
11.8 Power Series . . . . . . . . . . . . . . . . . .
11.9 Representation of Functions as Power Series
11.10Taylor and Maclaurin Series . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
3
10
15
17
19
20
23
26
28
31
7 Techniques of Integration
7.1 Integration by Parts . . . . . . . . . . . . . . . .
7.2 Trigonometric Integrals . . . . . . . . . . . . . . .
7.2.1 Products of Powers of Sine and Cosine . .
7.2.2 Products of Powers of Tangent and Secant
7.3 Trigonometric Substitution . . . . . . . . . . . . .
7.4 Partial Fraction Decomposition . . . . . . . . . .
7.8 Improper Integrals . . . . . . . . . . . . . . . . .
7.8.1 Infinite Intervals . . . . . . . . . . . . . .
7.8.2 Discontinuous Integrals . . . . . . . . . . .
7.8.3 Comparison Test for Integrals . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
35
35
38
38
40
43
47
52
52
54
56
.
.
.
.
.
57
57
57
60
61
65
8 Further Applications of Integrals
8.1 Arc Length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Area of a Surface of Revolution . . . . . . . . . . . . . . . . . . . . . . . . .
67
67
70
6 Applications of Integrals
6.1 Area Between Curves . . . . . . . . . . .
6.1.1 Area with Respect to the x -axis .
6.1.2 Area with Respect to the y-axis .
6.2 Volume Using the Disc/Washer Method .
6.3 Volume by Cylindrical Shell . . . . . . .
iii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12 Vectors and the Geometry of Space
12.1 Operations in 3-Space . . . . . . .
12.1.1 Points . . . . . . . . . . . .
12.1.2 Vectors . . . . . . . . . . . .
12.1.3 Operations . . . . . . . . . .
12.5 Equations in 3-Space . . . . . . . .
12.6 Cylinders and Quadric Surfaces . .
.
.
.
.
.
.
iv
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
73
73
74
75
77
79
Chapter 11
Sequences and Series
11.0
Prepositional Logic
All of the definitions in this section are adaptations of Irving M. Copi’s book Symbolic Logic.
Definition 1 (Proposition). A proposition is a statement which is either true or false.
Example 2. Britney is a goat. This statement has a definite truth value. It is either true
or false, whether or not one can tell the truth value is a different story.
Definition 3 (Negation). The negation of a statement P is a statement denoted ¬P which
has the opposite truth value of P .
Definition 4 (Argument). An argument is a group of propositions, one of which is claimed
to follow from another, providing grounds for truth.
Definition 5 (Structure of an Argument). An argument is normally presented as a conditional statement. That is, it is of the form “If something is a car then it is a vehicle.” The
statement that goes with the “If” clause is called the hypothesis while the statement that
goes with the “Then” clause is called the conclusion. For ease of notation, we typically call
the hypothesis P and the conclusion Q and denote the argument “If P then Q” by P ⇒ Q.
Statements of this form are false only when the premise is true and the conclusion is false.
Another way of saying P ⇒ Q is “P implies Q”
Definition 6 (Truth Table). A truth table is an array which lists all of the possible truth
values for a given argument.
Example 7. The truth table for “P and Q” (P ∧ Q), “P or Q” (P ∨ Q), and “P implies
Q” (P ⇒ Q) is:
P
Q P ∧Q P ∨Q P ⇒Q
T
T
T
T
T
T
F
F
T
F
F
T
F
T
T
F
F
F
F
T
1
Hammer 2
Calculus II Lecture Notes
Definition 8 (Converse). The converse of a conditional statement P ⇒ Q is the statement
Q ⇒ P.
Definition 9 (Contrapositive). The contrapositive of a conditional statement P ⇒ Q is
the statement ¬Q ⇒ ¬P .
Definition 10 (Tautological Equivalence). Two arguments are called tautologically equivalent (or tautologies for short) if given the truth values for the constituent statements, the
truth values for each argument is the same. We use the symbol A1 ≡ A2 to denote that A1
is tautologically equivalent to A2 .
Problem 11. Show that P ⇒ Q and ¬Q ⇒ ¬P are tautologically equivalent. We sometimes
write this as P ⇒ Q ≡ ¬Q ⇒ ¬P
Problem 12. Show that P ⇒ Q is not tautologically equivalent to Q ⇒ P .
Auburn University
January 10, 2015
Hammer 3
11.1. Sequences
11.1
Sequences
Definition 13 (Sequence). 1 A sequence is a function whose domain is the set N of natural
numbers. If s is a sequence, we usually denote its value at n ∈ N to be sn instead of s(n).
We denote a sequence as (s1 , s2 , . . .) , {s1 , s2 , . . .} , {sn }∞
n=1 , or simply (sn ).
Problem 14. Write the first five terms of the following sequences:
∞
n
•
n + 1 n=1
(−1)n (n + 1)
•
3n
√
∞
•
n − 3 n=3
n nπ o
• cos
6
Problem 15. Find the general formula for the sequence
1
3 −4 5 −6 7
,
,
,
,
,... .
5 25 125 625 3125
Definition from Steven R. Lay’s book Analysis With an Introduction to Proof
January 10, 2015
Auburn University
Hammer 4
Calculus II Lecture Notes
Note 16. Some sequences do not have a simple defining equation.
Example 17. The nth term of the decimals of e. The sequence of decimals of e look like
{7, 1, 8, 2, 8, 1, 8, 2, 8, 4, 5, . . .}.
Note 18. On the other hand, there are sequences that do have a closed form definition that
are simply not easy to find.
Example 19. The Fibbonacci Sequence is defined as f1 = f
3, fn =
2 = 1 and for n ≥ √
1+ 5
ϕn − ψ n
√
, where ϕ =
and
fn−1 + fn−2 . This has a closed form definition of
2
5
√
1− 5
.
ψ=
2
n
Problem 20. Visualize the sequence
.
n+1
Problem 21. What, if anything, does it seem like the sequence
Auburn University
n
n+1
is approaching?
January 10, 2015
Hammer 5
11.1. Sequences
Definition 22 (Limit of a Sequence). A sequence (an ) has the limit L if we can make the
terms of (an ) arbitrarily close to L as we like my taking n to be sufficiently large. If (an )
has a limit L, then we write lim an = L.
n→∞
Definition 23 (Convergence and Divergence). If lim an exists, then we say that the sen→∞
quence converges. Otherwise, we say that the sequence diverges or is divergent.
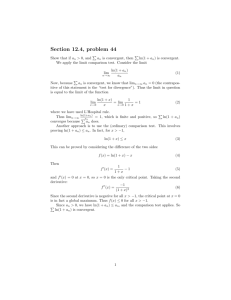
Theorem 24 (Subset of a Continuous Function). If lim f (x) = L and f (n) = an , where
x→∞
n ∈ Z, then lim an = L.
n→∞
3
2.28
2.1
1.89
2
1.68
1.31
1.11
1.03
1
1
0
2
3
4
5
6
7
Figure 11.1: Sequence as a Subset of a Function
Properties 25. If (an ) and (bn ) are convergent sequences and c ∈ R, then the following
properties hold:
• lim (an ± bn ) = lim an ± lim bn
n→∞
n→∞
n→∞
n→∞
apn
• lim
=
n→∞
an > 0.
• lim an bn = lim an · lim bn
n→∞
n→∞
limn→∞ an
as long as
limn→∞ bn
n→∞
• lim can = c lim an
n→∞
an
=
n→∞ bn
lim bn 6= 0
• lim
n→∞
lim an
n→∞
p
for p > 0 and
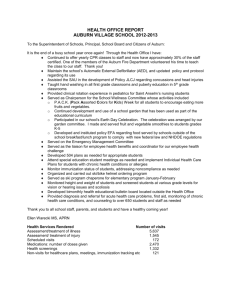
Theorem 26 (Squeeze Theorem). If an ≤ bn ≤ cn for all n ≥ n0 and lim an = lim cn = L,
n→∞
n→∞
then lim bn = L.
n→∞
(cn )
(bn )
(an )
Figure 11.2: Squeeze Theorem
Corollary 27. If lim |an | = 0, then lim an = 0.
n→∞
January 10, 2015
n→∞
Auburn University
Hammer 6
Problem 28. Determine whether the sequence
convergent, what does it converge to?
Problem 29. Determine whether the sequence
it is convergent, what does it converge to?
Calculus II Lecture Notes
n
n+1
is convergent or divergent. If it is
n
√
10 + n
is convergent or divergent. If
Problem 30. Determine whether the sequence ((−1)n ) is convergent or divergent. If it is
convergent, what does it converge to?
Problem 31. Determine whether the sequence
convergent, what does it converge to?
Auburn University
ln (n)
n
is convergent or divergent. If it is
January 10, 2015
Hammer 7
11.1. Sequences
Problem 32. Determine whether the sequence
convergent, what does it converge to?
(−1)n
n
is convergent or divergent. If it is
Theorem 33. If lim an = L and f is continuous at L, then lim f (an ) = f (L) .
n→∞
n→∞
Problem 34. Find lim sin (πn)
n→∞
January 10, 2015
Auburn University
Hammer 8
Calculus II Lecture Notes
n!
n!
1
= 0. Hint show that 0 ≤ n ≤
n
n→∞ n
n
n
Problem 35. Show that lim
Theorem 36 (Preliminary for Geometric Series). The sequence (rn ) is convergent if −1 ≤
r ≤ 1 and divergent otherwise.
Definition 37 (Monotone). A sequence (an ) is called non-decreasing if an ≤ an+1 for all
n ≥ 1. Similarly, a sequence (an ) is called non-increasing if an ≥ an+1 for all n ≥ 1. A
sequence is monotonic if it is either non-decreasing or non-increasing.
3
Problem 38. Show that
is decreasing.
n+5
Auburn University
January 10, 2015
Hammer 9
11.1. Sequences
Problem 39. Show that
n
n2 + 1
is decreasing.
Definition 40 (Bounded). A sequence (an ) is bounded above if there exists an M ∈ R
such that an ≤ M for all n ≥ 1. A sequence (an ) is bounded below if there exists an
m ∈ R such that an ≥ m for all n ≥ 1. If a sequence is bounded above or bounded below
then the sequence is said to be bounded.
Theorem 41. Every bounded monotonic sequence is convergent.
Suggested Homework: Section 11.1 numbers 5, 9, 13 − 15, 23 − 29, 33, 35, 37, 41, 42, 44, 49,
50, 53, 56
January 10, 2015
Auburn University
Hammer 10
11.2
Calculus II Lecture Notes
Series
Observation 42. What do we mean when we write π = 3.1415926535 . . .? It is a convenient
way to write the following:
π=
3
1
4
1
5
9
2
6
5
3
5
+ 1 + 2 + 3 + 4 + 5 + 6 + 7 + 8 + 9 + 10 + · · · .
0
10
10
10
10
10
10
10
10
10
10
10
Definition 43 (Series). Adding up the terms in an infinite sequence is a series. That is to
say, given a sequence (an ), the series would be denoted as
∞
X
ai .
i=1
Definition 44 (Partial Sum). Let (an ) be a sequence. The partial sums are
s 1 = a1
s 2 = a1 + a2
s3 = a1 + a2 + a3
..
.
sm = a1 + a2 + a3 =
m
X
ai .
i=1
P
the nth partial
Definition 45 (Series Convergence & Sum). Given a series ∞
i=1 ai , let sn beP
sum. If the sequence (sn ) converges (that is limn→∞ sn = s), then the series ∞
i=1 an is said
to converge and we write
∞
X
an = s.
i=1
The number s is called the sum of the series. Moreover, if (sn ) diverges, then the series is
also said to be divergent.
Auburn University
January 10, 2015
Hammer 11
11.2. Series
Problem 46. Determine whether or not the series whose first n terms sum to sn = a1 +
2n
converges or diverges.
a2 + · · · + an =
3n + 5
∞
X
2n
Note This does not mean that our series is
. To find the sequence, one would have
3n
+
5
n=1
to find a1 , a2 , a3 , . . . and find the pattern, which is a very difficult problem in general.
Theorem 47 (Geometric Series). The geometric series
∞
X
arn−1 = a + ar + ar2 + · · ·
n=1
is convergent if |r| < 1 and its sum is
∞
X
arn−1 =
n=1
a
.
1−r
The geometric series is divergent if |r| ≥ 1.
Problem 48. Show that the geometric series converges when |r| < 1 and diverges otherwise.
January 10, 2015
Auburn University
Hammer 12
Calculus II Lecture Notes
Problem 49. Find the sum of the series 5 −
Problem 50. Is
∞
X
10 20 40
+
−
+ ···
3
9
27
22n 31−n convergent or divergent?
n=1
Problem 51. Find the sum of the series
∞
X
xn for |x| < 1.
n=0
Problem 52. Show that
sums.
Auburn University
∞
X
n=1
1
converges and find its sum. Hint Look at the partial
n (n + 1)
January 10, 2015
Hammer 13
11.2. Series
Theorem 53 (Harmonic Series). The harmonic series
∞
X
1
n
n=1
is divergent.
Problem 54. Show that the harmonic series diverges.
January 10, 2015
Auburn University
Hammer 14
Calculus II Lecture Notes
Theorem 55 (Divergence Test). If limn→∞ an 6= 0, then
P∞
n=1
an is divergent.
Problem 56. Write the contrapositive of the Divergence Test.
Problem 57. Show that
∞
X
n=1
n2
diverges.
5n2 + 4
Problem 58. Find the sum of
∞ X
n=1
3
1
+ n
n (n + 1) 2
Suggested Homework: Section 11.2 numbers 3, 15, 17, 18, 21, 27, 29, 30, 31, 33, 38, 45
Auburn University
January 10, 2015
Hammer 15
11.3. The Integral Test
11.3
The Integral Test
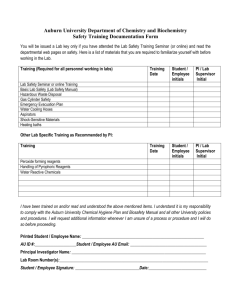
Observation 59. Let the sequence (an ) is defined to be integer points on a positive, continuous, non-increasing function f (that is points are labeled as (n, an ) = (n, f (n)) where
n ∈ N). Then if we were to examine the area under the curve with the same technique as we
did with Riemann Sums, we would see that the width of each rectangle would be 1, and the
height would be f (n) for each point n. Moreover, the area of each rectangle is f (n) and the
summation of that sequence as a series would be the summation of all of those rectangles.
This Does Not, however, give us the true summation of the sequence, since we are not
allowing these rectangles to be infinitely close together within each integer point. The best
we can say is that the series converges if and only if the integral converges.
f (x ) =
1
1
x2
1
12
0
1
1
1
1
1 212 2 312 3 42 4 52 5 62 6 72 7
Figure 11.3: Integral Test
Theorem 60. Suppose that f is a continuous,
positive, non-increasing function
´ ∞ on [1, ∞)
P∞
such that an = f (n). Then the series n=1 an is convergent if and only if 1 f (x) dx =
´t
limt→∞ 1 f (x) dx = L is convergent (that is the limit exists and L ∈ R and L 6= ±∞).
Problem 61. Does
∞
X
n=1
January 10, 2015
n2
1
converge or diverge?
+1
Auburn University
Hammer 16
Calculus II Lecture Notes
Theorem 62 (p-Series). The p-Series
P∞
1
n=1 np
is convergent if p > 1 and divergent if p ≤ 1.
Problem 63. Determine whether or not the following is convergent or divergent:
•
∞
X
1
n3
n=1
∞
X
1
•
.
1/3
n
n=1
Problem 64. Determine whether
∞
X
ln (n)
n=1
n
converges or diverges.
Suggested Homework: Section 11.3 numbers 3, 4, 5, 11, 12, 13, 15, 25
Auburn University
January 10, 2015
Hammer 17
11.4. The Comparison Test
11.4
The Comparison Test
P
P∞
Theorem 65 (Direct Comparison Test). Suppose that ∞
a
and
n
n=1
n=1 bn are series with
positive terms.
P
P∞
• If ∞
n=1 bn is convergent and an ≤ bn for all n ∈ N, then
n=1 an is also convergent.
P
P∞
• If ∞
n=1 bn is divergent and an ≥ bn for all n ∈ N, then
n=1 an is also divergent.
Problem 66. Determine whether
∞
X
n=1
January 10, 2015
2n2
5
converges or diverges.
+ 4n + 3
Auburn University
Hammer 18
Calculus II Lecture Notes
Theorem 67 (Limit Comparison Test). Suppose that
positive terms and c ∈ R. If
an
lim
= c > 0,
n→∞ bn
then either both series converge or both series diverge.
Problem 68. Determine whether
∞
X
n=1
P∞
n=1
an and
P∞
n=1 bn
are series with
1
converges or diverges.
2n − 1
∞
X
2n2 + 3n
√
Problem 69. Determine whether
converges or diverges.
5
5
+
n
n=1
Suggested Homework: Section 11.4 numbers 3, 4, 5, 7, 14, 15, 17, 21, 23, 29, 30
Auburn University
January 10, 2015
Hammer 19
11.5. Alternating Series
11.5
Alternating Series
Theorem 70 (Alternating Series Test). If the alternating series
term in the sequence (bn ) is positive satisfies
P∞
n=1
(−1)n−1 bn where each
• (bn ) is non-increasing
• lim bn = 0
n→∞
then the series
P∞
n=1
(−1)n−1 bn converges.
Problem 71. Determine whether the alternating harmonic series
∞
X
(−1)n−1
n
n=1
or diverges.
Problem 72. Determine whether
∞
X
(−1)n 3n
n=1
Problem 73. Determine whether
∞
X
n=1
4n − 1
(−1)n+1
converges
converges or diverges.
n2
converges or diverges.
n3 + 1
Suggested Homework: Section 11.5 numbers 2 − 6, 8, 9, 11, 13, 17, 19
January 10, 2015
Auburn University
Hammer 20
11.6
Calculus II Lecture Notes
Absolute Convergence, Ratio, & Root Test
Definition
P74 (Absolutely Convergent). A series
the series
|an | is convergent.
P
an is called absolutely convergent if
Definition 75 (Conditionally Convergent). A series is called conditionally convergent
if it is convergent but not absolutely convergent.
P
Theorem 76 (Absolute ⇒ Conditional). If a series
an is absolutely convergent, then it
is also conditionally convergent.
Problem 77. Determine whether whether or not
∞
X
(−1)n−1
n=1
it conditionally convergent?
Problem 78. Determine whether whether or not
∞
X
(−1)n−1
n=1
it conditionally convergent?
Problem 79. Determine whether whether or not
Auburn University
n
∞
X
cos (n)
n=1
conditionally convergent?
n2
n2
is absolutely convergent. Is
is absolutely convergent. Is
is absolutely convergent. Is it
January 10, 2015
11.6. Absolute Convergence, Ratio, & Root Test
Hammer 21
P
Theorem 80 (Ratio Test). Let ∞
n=1 an be a series. Then
an+1 P
= L < 1, then the series ∞ an is absolutely (and therefore condition• if lim n=1
n→∞
an
ally) convergent.
an+1 an+1 P
= ∞ then the series ∞ an is divergent.
• if lim = L > 1 or lim n=1
n→∞
n→∞
an
an
an+1 = 1, then no conclusion can be drawn from this test.
• if lim n→∞
an ∞
X
n3
Problem 81. Determine whether
(−1) n is convergent or divergent. Is it absolutely
3
n=1
convergent?
Problem 82. Determine whether
∞
X
nn
n=1
vergent?
January 10, 2015
n
n!
is convergent or divergent. Is it absolutely con-
Auburn University
Hammer 22
Calculus II Lecture Notes
P
Theorem 83 (Root Test). Let ∞
n=1 an be a series. Then
p
P
• If lim n |an | = L < 1, then ∞
n=1 an is absolutely (and therefore conditionally) conn→∞
vergent.
p
p
P
• if lim n |an | = L > 1 or lim n |an | = ∞ then the series ∞
n=1 an is divergent.
n→∞
n→∞
• lim
n→∞
p
n
|an | = 1, then no conclusion can be drawn from this test.
Problem 84. Determine whether
n
∞ X
2n + 3
n=1
convergent?
3n + 2
is convergent or divergent. Is it absolutely
Suggested Homework: Section 11.6 numbers 3, 5, 7, 9, 10, 11 − 13, 16, 17, 19, 21, 23, 27, 28
Auburn University
January 10, 2015
Hammer 23
11.7. Strategies for Testing Series
11.7
Strategies for Testing Series
The only thing I really have to say here is that practice makes better. If you do enough problems, eventually you will get an intuition for what will work in what situation. Nevertheless,
here is a list of tests that could come in handy.
Test
When to Use
P∞
Geometric Series
k=1
kth Term Test
P∞
Comparison Test
k=1
ak where f (k) = ak and
k=1 kp
P∞
k=1
ak and
P∞
k=1
P∞
k=1 bk ,
ak and
where 0 ≤ ak ≤ bk
P∞
k=1 bk ,
ak
bk
ak , bk > 0 and limk→∞
Absolute Convergence
P∞
k=1
where
=L>0
(−1)k+1 ak where ak > 0 for all k
Root Test
if |r| < 1;
If limk→∞ ak 6= 0, the series diverges.
´∞
P∞
k=1 ak and 1 f (x) dx
both converge or both diverge.
Converges for p > 1, diverges for p ≤ 1.
P∞
P
If k=1 bk converges, then ∞
k=1 ak converges.
P
P∞
a
diverges,
then
If ∞
k=1 k
k=1 bk diverges.
P∞
P∞
k=1 ak and
k=1 bk
both converge or both diverge.
If limk→∞ ak = 0 and ak+1 ≤ ak for all k,
Any Series (especially those involving
exponentials and/or factorials)
then the series converges.
P
If ∞
k=1 |ak | converges, then
P∞
(absolutely).
k=1 ak converges
ak+1 For limk→∞ a = L,
k
P
if L < 1, ∞
k=1 ak converges absolutely,
P
if L > 1, ∞
k=1 ak diverges,
Any Series (especially those involving
exponentials)
if L = 1, no conclusion.
p
For limk→∞ k |ak | = L,
P
if L < 1, ∞
k=1 ak converges absolutely,
P
if L > 1, ∞
k=1 ak diverges,
Series with some positive and some
negative terms (including alternating series)
Ratio Test
a
1−r
diverges if |r| ≥ 1.
f is continuous, decreasing, and f (x) ≥ 0
P∞ 1
Limit Comparison Test
Alternating Series Test
Converges to
ark
All Series
Integral Test
p-series
Conclusion
if L = 1, no conclusion.
∞
X
n−1
Problem 85. Determine whether the series
converges or diverges.
2n + 1
n=1
January 10, 2015
Auburn University
Hammer 24
Problem 86. Determine whether the series
Calculus II Lecture Notes
∞
X
n=1
Problem 87. Determine whether the series
∞
X
√
n3 + 1
converges or diverges.
3n3 + 4n2 + 2
2
ne−n converges or diverges.
n=1
Problem 88. Determine whether the series
∞
X
n=1
Auburn University
(−1)n
n3
converges or diverges.
n4 + 1
January 10, 2015
Hammer 25
11.7. Strategies for Testing Series
Problem 89. Determine whether the series
∞
X
2k
k=1
Problem 90. Determine whether the series
∞
X
n=1
k!
converges or diverges.
1
converges or diverges.
2 + 3n
Suggested Homework: Section 11.7 numbers 1, 2, 5 − 9, 11, 13, 14, 15 − 18, 23, 25 − 34, 37
January 10, 2015
Auburn University
Hammer 26
11.8
Calculus II Lecture Notes
Power Series
Definition 91 (Power Series). A power series is a series of the form
∞
X
cn x n = c0 x 0 + c1 x 1 + x 2 x 2 + · · ·
n=0
where ci represent coefficients and x denotes our variable.
Definition 92 (Power Series Centered at a). A power series centered at a is a series of
the form
∞
X
cn (x − a)n .
n=1
Note 93. When x = a, all of the terms are 0; so, naturally the power series centered at a
always converges when x = a.
Problem 94. For what values of x is the series
∞
X
n!xn convergent?
n=0
Problem 95. For what values of x is the series
∞
X
(x − 3)n
n=1
Auburn University
n
converge?
January 10, 2015
Hammer 27
11.8. Power Series
Theorem 96 (Radius of Convergence). For a given power series
only three possibilities:
P∞
n=1 cn
(x − a)n , there are
• The series converges only when x = a,
• The series converges for all x ∈ R, and
• There is a positive real number R such that the series converges if |x − a| < R and
divergent otherwise.
This number R is called the radius of convergence.
∞
X
(−3)n xn
√
.
Problem 97. Find the radius of convergence for the series
n+2
n=0
Problem 98. Find the radius of convergence for the series
∞
X
n (x + 2)n
n=0
3n+1
Suggested Homework: Section 11.8 numbers 3, 5, 7, 9, 10, 11, 13, 16, 18, 19
January 10, 2015
Auburn University
Hammer 28
11.9
Calculus II Lecture Notes
Representation of Functions as Power Series
Recall 99. There is only one series whose sum we actually know – the geometric series.
Let’s recall what that says. Recall,
∞
X
n=0
xn =
1
1−x
whenever |x| < 1.
Problem 100. Express
1
as a power series and find its radius of convergence.
1 + x2
Problem 101. Find a power series representation for
1
and find its radius of convergence
x+2
x3
Problem 102. Find a power series representation of
and find its radius of convergence.
x+2
Auburn University
January 10, 2015
Hammer 29
11.9. Representation of Functions as Power Series
Theorem 103 (Integration and Differentiation). If the power series
radius of convergence R > 0, then the function f defined by
f (x) = c0 + c1 (x − a) + c2 (x − a)2 + · · · =
∞
X
P∞
n=0 cn
(x − a)n has a
cn (x − a)n
n=0
is differentiable on the interval (a − R, a + R) and
0
• f (x) =
∞
X
ncn (x − a)n−1
n=∗
ˆ
•
f (x) dx = k +
∞
X
n=0
cn
(x − a)n+1
n+1
where ∗ represents the index of the first non-constant term of the series and k ∈ R is a
constant. In both cases, the radius of convergence is R.
Problem 104. Express
January 10, 2015
1
as a power series.
(1 − x)2
Auburn University
Hammer 30
Calculus II Lecture Notes
Problem 105. Find a power series representation for ln (1 + x).
Problem 106. Find a power series representation for f (x) = arctan (x)
Suggested Homework: Section 11.9 numbers 6, 7, 9, 10, 12, 17, 27, 39
Auburn University
January 10, 2015
Hammer 31
11.10. Taylor and Maclaurin Series
11.10
Taylor and Maclaurin Series
Goal 107. To represent as many functions as we can as a power series.
Theorem
108 (Taylor Series). If f has a power series representation at a (that is f (x) =
P∞
c
(x
− a)n for |x − a| < R) then its coefficients are of the form
n=0 n
cn =
f (n) (a)
.
n!
That is to say that if f has a power series representation then it can be written in the form
f (x) =
∞
X
f (n) (a)
n=0
n!
(x − a)n
and has radius of convergence R.
Definition 109 (Maclaurin Series). A Taylor Series centered at a = 0 is called a Maclaurin
Series. That is to say that a Maclaurin Series can be written as
f (x) =
∞
X
f (n) (0)
n=0
n!
xn .
Problem 110. Find the Maclaurin Series of f (x) = ex and find its radius of convergence.
January 10, 2015
Auburn University
Hammer 32
Calculus II Lecture Notes
Problem 111. Find the Maclaurin Series for sin (x).
Problem 112. Find the Maclaurin Series for cos (x).
Auburn University
January 10, 2015
Hammer 33
11.10. Taylor and Maclaurin Series
Problem 113. Find the Maclaurin Series for f (x) = x cos (x).
Problem 114. Represent sin (x) as a Taylor Series centered at
π
.
3
Problem 115 (The Binomial Series). Find the Maclaurin Series for f (x) = (1 + x)k for all
k∈R
Suggested Homework: Section 11.10 numbers 3, 4, 6 − 8, 15, 16, 27, 28, 30, 32, 36
January 10, 2015
Auburn University
Hammer 34
Auburn University
Calculus II Lecture Notes
January 10, 2015
Chapter 7
Techniques of Integration
7.1
Integration by Parts
Theorem 116 (Integration by Parts). Given two continuous, differentiable functions f (x)
and g(x),
ˆ
ˆ
0
f (x)g (x) dx = f (x)g(x) − g(x)f 0 (x) dx.
Colloquially, we say u = f (x) and v = g(x). Then we have
ˆ
ˆ
u dv = uv − v du.
ˆ
Problem 117. Prove that
ˆ
0
f (x)g (x) dx = f (x)g(x) −
product rule.
ˆ
Problem 118. Evaluate
x sin(x) dx.
35
g(x)f 0 (x) dx. Hint Recall the
Hammer 36
Problem 119. Evaluate
Calculus II Lecture Notes
´
ln(x) dx.
ˆ
t2 et dt.
Problem 120. Evaluate
ˆ
Problem 121. Evaluate
Auburn University
ex sin(x) dx.
January 10, 2015
Hammer 37
7.1. Integration by Parts
ˆ
Problem 122. Evaluate
1
arctan(x) dx.
0
Problem 123. Prove the reduction formula
ˆ
ˆ
1
n−1
n
n−1
sin (x) dx = − cos(x) sin (x) +
sinn−2 (x) dx.
n
n
Suggested Homework: Section 7.1 numbers 1 − 4, 7, 10 − 12, 21, 24, 29, 30, 31
January 10, 2015
Auburn University
Hammer 38
7.2
7.2.1
Calculus II Lecture Notes
Trigonometric Integrals
Products of Powers of Sine and Cosine
There are three types of integrals of the form
´
sinm (x) cosn (x)dx:
I. The power on sin(x) is odd.
II. The power on cos(x) is odd.
III. Both powers are even.
For integrals in which both powers are odd, we can follow the strategy for type I or type II;
choosing the type corresponding to the smaller power will save a little work.
Strategy for Type I Remember that m is odd, so m − 1 is even (divisible by 2).
(1) Rewrite sinm (x) = sinm−1 (x) · sin(x); then rewrite sinm−1 (x) = [sin2 (x)]k .
(2) Apply the identity sin2 (x) = 1 − cos2 (x) to the [sin2 (x)]k from above.
(3) Make the substitution u = cos(x) (so du = − sin(x)dx) to produce the polynomial
integrand (1 − u2 )k · un .
(4) Expand the product, and evaluate the integral.
Strategy for Type II Remember that n is odd, so n − 1 is even (divisible by 2).
(1) Rewrite cosn (x) = cosn−1 (x) · cos(x); then rewrite cosn−1 (x) = [cos2 (x)]k .
(2) Apply the identity cos2 (x) = 1 − sin2 (x) to the [cos2 (x)]k from above.
(3) Make the substitution u = sin(x) (so du = cos(x)dx) to produce the polynomial
integrand um · (1 − u2 )k .
(4) Expand the product, and evaluate the integral.
Strategy for Type III Remember that m and n are both even (divisible by 2).
(1) Rewrite sinm (x) = [sin2 (x)]j and cosn (x) = [cos2 (x)]k .
(2) Apply the identities sin2 (x) =
[cos2 (x)]k from above.
1−cos(2x)
2
and cos2 (x) =
1+cos(2x)
2
to the [sin2 (x)]j and
(3) Expand the resulting product, and separate the terms into separate integrals. There
should be a constant term, and one or more terms consisting of the cosine function to
a positive integer power.
(4) Evaluate each integral.
Use the Type II strategy for all odd powers of cosine greater than 1.
For all positive even powers of cosine, return to Step 1 of this strategy and apply it.
Auburn University
January 10, 2015
Hammer 39
7.2. Trigonometric Integrals
Eliminating Radicals Sometimes we can eliminate a radical in an integrand by applying
one of the identities below to rewrite the expression under the radical as a perfect square;
we then take the square root, simplify if possible, and evaluate the integral.
sin2 (x) = 1 − cos2 (x)
cos2 (x) = 1 − sin2 (x)
sin2 (x) =
tan2 (x) = sec2 (x) − 1
sec2 (x) = 1 + tan2 (x)
cos2 (x) =
cot2 (x) = csc2 (x) − 1
csc2 (x) = 1 + cot2 (x)
tan2 (x) =
1−cos(2x)
2
1+cos(2x)
2
1−cos(2x)
1+cos(2x)
Powers of the Other Four Trigonometric Functions We apply the identities sec2 (x) =
1 + tan2 (x) and csc2 (x) = 1 + cot2 (x) in various ways, typically with the goal of making
u-substitution possible; sometimes it is also necessary to use integration by parts.
ˆ
Problem 124. Evaluate cos3 (x) dx.
ˆ
Problem 125. Evaluate
January 10, 2015
sin5 (x) cos2 (x) dx.
Auburn University
Hammer 40
Calculus II Lecture Notes
ˆ
Problem 126. Evaluate
π
4
sin2 (x) dx.
0
ˆ
Problem 127. Evaluate
7.2.2
sin4 (x) dx.
Products of Powers of Tangent and Secant
Strategy 128. Say we want to evaluate
´
tanm (x) secn (x) dx.
• If n is even,
– Save a factor of sec2 (x) and use sec2 (x) = 1 + tan2 (x).
– Use the u substitution u = tan(x).
• If m is odd,
– Save a factor of sec(x) tan(x) and use tan2 (x) = sec2 (x) − 1.
– Use the u substitution u = sec(x).
ˆ
Problem 129. Evaluate tan6 (x) sec4 (x) dx.
Auburn University
January 10, 2015
Hammer 41
7.2. Trigonometric Integrals
ˆ
tan5 (θ) sec7 (θ) dθ.
Problem 130. Evaluate
ˆ
Recall 131.
ˆ
tan(x) dx = ln |sec(x)| + c and
sec(x) dx = ln |sec(x) + tan(x)| + c
ˆ
Problem 132. Evaluate
January 10, 2015
tan3 (x) dx.
Auburn University
Hammer 42
Calculus II Lecture Notes
ˆ
Problem 133. Evaluate
sec3 (x) dx. Hint Use Integration by Parts.
Recall 134.
sin(A) cos(B) = 12 [sin (A − B) + sin (A + B)]
sin(A) sin(B) = 12 [cos (A − B) − cos (A + B)]
cos(A) cos(B) = 21 [cos (A − B) + cos (A + B)] .
ˆ
Problem 135. Evaluate sin(4x) cos(5x) dx.
Suggested Homework: Section 7.2 numbers 1, 3, 5 − 7, 10, 11, 15, 21, 23, 25, 27, 29, 38
Auburn University
January 10, 2015
Hammer 43
7.3. Trigonometric Substitution
7.3
Trigonometric Substitution
Goal 136. The goal of this chapter is to modify u-substitution slightly. This modification
will be known as an inverse substitution.
Expression Substitution
Domain
√
a2 − x2 x = a sin(θ)
− π2 ≤ θ ≤ π2
√
a2 + x2 x = a tan(θ)
− π2 < θ < π2
√
x2 − a2 x = a sec(θ) 0 ≤ θ ≤ π2 or π ≤ θ <
3π
2
ˆ √
9 − x2
Problem 137. Evaluate
dx.
x2
January 10, 2015
Auburn University
Hammer 44
Calculus II Lecture Notes
x2 y 2
Problem 138. Find the area of the enclosed ellipse 2 + 2 = 1.
a
b
ˆ
Problem 139. Evaluate
Auburn University
x2
√
1
dx.
x2 + 4
January 10, 2015
Hammer 45
7.3. Trigonometric Substitution
ˆ
Problem 140. Evaluate
ˆ
Problem 141. Evaluate
0
January 10, 2015
x
√
dx.
x2 + 4
3
√
2
3
x3
(4x2 + 9)3/2
dx.
Auburn University
Hammer 46
Calculus II Lecture Notes
ˆ
Problem 142. Evaluate
ˆ
Problem 143. Evaluate
dx
√
for a > 0.
x 2 − a2
x
√
dx. Hint Complete the square.
3 − 2x − x2
Suggested Homework: Section 7.3 numbers 2, 4, 5, 7, 9, 10, 11, 16, 22
Auburn University
January 10, 2015
7.4. Partial Fraction Decomposition
7.4
Hammer 47
Partial Fraction Decomposition
Goal 144. To be able to integrate any rational function!
Theorem 145 (Fundamental Theorem of Algebra). Every polynomial in R is factorable
into linear terms and irreducible quadratics.
Strategy 146. If the degree in the numerator is greater than or equal to the degree in the
denominator, use long division.
ˆ 3
x +x
dx.
Problem 147. Evaluate
x−1
Motivation 148. If we were asked to add fractions, we would do the following:
2
1
2(x + 1)
1(x)
2x + 2
x
2x + 2 + x
3x + 2
+
=
+
=
+
=
= 2
.
x x+1
x(x + 1) (x + 1)(x)
x(x + 1) x(x + 1)
x(x + 1)
x +x
What we would like to do is to figure out how to do this same procedure in reverse.
January 10, 2015
Auburn University
Hammer 48
Calculus II Lecture Notes
Strategy 149. If the denominator is the product of distinct linear factors, split the linear
factors up and solve the system of equations.
ˆ
x2 + 2x − 1
Problem 150. Evaluate
dx.
2x3 + 3x2 − 2x
Auburn University
January 10, 2015
7.4. Partial Fraction Decomposition
Hammer 49
Strategy 151. If the denominator is a product of linear factors, some of which are repeated
roots, split the factors adding one to the degree of the repeated root until it is of the desired
power.
ˆ
ˆ 4
x − 2x2 + 4x + 1
4x
= x+1+ 3
dx. Notice that
Problem 152. Evaluate
3
2
2
x −x −x+1
x −x −x+1
long division on the first integral produces the second.
January 10, 2015
Auburn University
Hammer 50
Calculus II Lecture Notes
Strategy 153. If the denominator has an irreducible quadratic, make the numerator of
degree one less.
ˆ
3x2 − x + 4
Problem 154. Evaluate
dx.
x3 + 4x
Auburn University
January 10, 2015
Hammer 51
7.4. Partial Fraction Decomposition
Strategy 155. If the denominator contains repeated irreducible, treat the repeated roots
as before with the denominator of degree one less than the denominator.
ˆ
1 − x + 2x2 − x3
Problem 156. Evaluate
dx
x(x2 + 1)2
Suggested Homework: Section 7.4 numbers 2, 3, 12, 15, 16, 17, 18, 19, 26, 27
January 10, 2015
Auburn University
Hammer 52
7.8
7.8.1
Calculus II Lecture Notes
Improper Integrals
Infinite Intervals
Definition 157 (Integral Over an Infinite Interval). The following will help us evaluate
integrals without bound in at least one direction:
´t
´∞
´t
• If a f (x) dx exists for every t ≥ a, then a f (x) dx = limt→∞ a f (x) dx = L provided
L ∈ R (that is, L cannot be ±∞).
´b
´b
´b
• If t f (x) dx exists for every t < b, then −∞ f (x) dx = limt→−∞ t f (x) dx = L provided L ∈ R (that is, L cannot be ±∞).
´∞
´b
´∞
´∞
´b
• If both a f (x) dx and −∞ f (x) dx exist, then −∞ f (x) dx = a f (x) dx+ −∞ f (x) dx
If L ∈ R and not ±∞, then the integral is said to converge. If the limit does not exist or
L = ±∞, then the integral is said to diverge.
Problem 158. Find the area under the curve y =
ˆ
Problem 159. Determine whether
1
Auburn University
∞
1
from x = 1 and onward.
x2
1
dx is convergent or divergent.
x
January 10, 2015
Hammer 53
7.8. Improper Integrals
ˆ
0
xex dx is convergent or divergent.
Problem 160. Determine whether
−∞
ˆ
∞
Problem 161. Determine whether
−∞
1
dx is convergent or divergent.
1 + x2
ˆ
Problem 162. For what values of p is the integral
1
January 10, 2015
∞
1
dx convergent?
xp
Auburn University
Hammer 54
7.8.2
Calculus II Lecture Notes
Discontinuous Integrals
Definition 163 (Integral Over Discontinuous Interval). The following will help us evaluate
integrals that are not continuous over a given interval:
´b
´t
• If f is continuous on [a, b) and discontinuous at b, then a f (x) dx = limt→b− a f (x) dx =
L provided L ∈ R (that is, L cannot be ±∞).
´b
´b
• If f is continuous on (a, b] and discontinuous at a, then a f (x) dx = limt→a+ t f (x) dx =
L provided L ∈ R (that is, L cannot be ±∞).
´c
´b
• If f is discontinuous at c where a < c < b and both a f (x) dx and c f (x) dx are
´b
´c
´b
convergent, then a f (x) dx = a f (x) dx + c f (x) dx
If L ∈ R and not ±∞, then the integral is said to converge. If the limit does not exist or
L = ±∞, then the integral is said to diverge.
ˆ 5
1
√
dx converges or diverges.
Problem 164. Determine whether
x−2
2
ˆ
Problem 165. Determine whether
π
2
sec(x) dx converges or diverges.
0
Auburn University
January 10, 2015
Hammer 55
7.8. Improper Integrals
ˆ
1
Problem 166. Determine whether
ln(x) dx converges or diverges.
0
ˆ
Problem 167. Determine whether
0
January 10, 2015
3
1
dx converges or diverges.
x−1
Auburn University
Hammer 56
7.8.3
Calculus II Lecture Notes
Comparison Test for Integrals
Theorem 168 (Comparison Test for Integrals). Suppose that f and g are continuous functions with 0 ≤ g(x) ≤ f (x) for x ≥ a.
´∞
´∞
• If a f (x) dx is convergent, then a g(x) dx is also convergent.
´∞
´∞
• If a g(x) dx is divergent, then a f (x) dx is also divergent.
ˆ
ˆ ∞
2
−x2
e
dx is convergent. Note
e−x dx has no closed form
Problem 169. Show that
integral.
0
ˆ
Problem 170. Determine whether
1
∞
1 + e−x
dx converges or diverges.
x
Suggested Homework: Section 7.8 numbers 1, 7, 9, 13, 14 − 16, 18, 25, 27 − 33, 35, 49 − 52,
54, 55, 57
Auburn University
January 10, 2015
Chapter 6
Applications of Integrals
6.1
6.1.1
Area Between Curves
Area with Respect to the x -axis
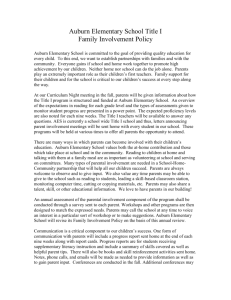
7
ApproximateArea
= 14.13
ExactArea = 13.86
6
5
4
3
2
1
Start −1
−2
0
1
End
2
3
Figure 6.1: Area Between Two Curves
Goal 171. To be able to find the area between two curves.
Motivation 172. Say we want to find the area enclosed by two curves. Over a given area,
there is a top function and a bottom function. Let’s call the top function f (x) and the
bottom function g(x). Just as we did with area under the curve, we can split this region
into n rectangles and add up all of their areas to approximate the area between these curves.
Each rectangle has width ∆x. To find the length of each rectangle, let x∗i denote a point
within the ith rectangle. Then the length (or height) of rectangle i is f (x∗i ) − g(x∗i ).
57
Hammer 58
Calculus II Lecture Notes
Theorem 173. The area, A, between two curves can be found by
A = lim
n→∞
n
X
(f (x∗i ) − g (x∗i )) ∆x.
i=1
Recall 174. From Chapter 5.3, we have seen that
A = lim
n→∞
n
X
ˆ
f
(x∗i )
b
f (x) dx.
∆x =
a
i=1
Following the same line of reasoning, we have
Theorem 175. The area A of the region bounded by the curves y = f (x), y = g(x), x = a
and x = b, where f and g are continous functions such that f (x) ≥ g(x) for all x ∈ [a, b] is
A = lim
n→∞
n
X
i=1
ˆ
(f
(x∗i )
−g
(x∗i ))
b
f (x) − g(x) dx.
∆x =
a
(Think: “Top minus Bottom”)
Problem 176. Find the area of the region bounded above by y = ex , below by y = x, and
on the sides by x = 0 and x = 1.
Auburn University
January 10, 2015
6.1. Area Between Curves
Hammer 59
Problem 177. Find the area bounded by y = x2 and y = 2x − x2 .
Problem 178. Find the area bounded by y = sin(x) and y = cos(x) from x = 0 to x = π2 .
January 10, 2015
Auburn University
Hammer 60
6.1.2
Calculus II Lecture Notes
Area with Respect to the y -axis
Finding the area with respect to the y-axis is very similar. One simply has to tilt his or
her head to the right. That is to say that instead of thinking “Top Minus Bottom,” think
“Right minus Left.”
Problem 179. Find the area enclosed by y = x − 1 and y 2 = 2x + 6.
Problem 180. Find the area enclosed by x = 2y − y 2 and x = y 2 − 4y.
Suggested Homework: Section 6.1 numbers 1, 4, 12, 24, 27, 44, 50
Auburn University
January 10, 2015
Hammer 61
6.2. Volume Using the Disc/Washer Method
6.2
Volume Using the Disc/Washer Method
Motivation 181. Just as we used rectangles to approximate area under a curve in R2 , we
will use right circular cylinders to approximate the volume of a solid in R3 .
Recall 182. The volume of a right circular cylinder is the area of the base A times the
height of the cylinder h. That is to say
Vcylinder = Ah.
Strategy 183. So, we will be
• Cutting a solid S into cylindrical cross sections,
• Finding the volume of each cross section, and
• adding them all up.
That is to say that
V (S) ≈
n
X
A(x∗i )∆x.
i=1
Observation 184. It should be noted that the more cylindrical cross sections, the closer
the approximation will be.
Definition 185 (Disc Method). Let S be a solid that lies between x = a and x = b. If the
cross sectional area of S in the plane Px through x and perpendicular to the x-axis is A(x),
where A is a continuous function, then the volume of S is
V (S) = lim
n→∞
n
X
i=1
ˆ
A (x∗i ) ∆x
b
A(x) dx.
=
a
Figure 6.2: Disc Method
January 10, 2015
Auburn University
Hammer 62
Calculus II Lecture Notes
4
Problem 186. Show that the volume of a sphere of radius r is V = πr3 .
3
Problem 187. Find the volume of the solid obtained by rotating the curve y =
the x-axis from x = 0 to x = 1.
Auburn University
√
x about
January 10, 2015
6.2. Volume Using the Disc/Washer Method
Hammer 63
Problem 188 (Gabriel’s Horn Pt. I). Find the volume of the solid obtained by rotating the
1
curve y = about the x-axis from 1 to an arbitrary point a > 1. What happens as a gets
x
extremely large?
Problem 189. Find the volume of the solid obtained by rotating the curve y = x3 bounded
by y = 0 and y = 8 about the y-axis.
January 10, 2015
Auburn University
Hammer 64
Calculus II Lecture Notes
Figure 6.3: Washer Method
Motivation 190. What if we wanted to rotate the area between two functions around the
x-axis or y-axis? That shape would look like a washer as depicted in Figure 6.3.
Problem 191. Given the outer radius of the disc is length R from the axis of rotation and
the inner circle of the disc is of length r from the axis of rotation, what is the area of the
base of the disc?
Problem 192. Find the volume of the surface produced by rotating the region bounded by
y = x and y = x2 about the line x = −1.
Suggested Homework: Section 6.2 numbers 4, 5, 12, 15, 19, 25, 42, 54, 56, 59
Auburn University
January 10, 2015
6.3. Volume by Cylindrical Shell
6.3
Hammer 65
Volume by Cylindrical Shell
Figure 6.4: Shell Method
Motivation 193. Sometimes it is easier to deal with cylindrical shells rather than discs.
When this happens, what we want to do is peal away sections of this surface one layer at
a time, much like layers of an onion (not to be confused with The Onion). In this case,
each layer can be straightened out and placed on a table so that it looks like a rectangular
prism, which has volume length times width times height. The length of the shell is the
circumference of the shell, the length is the height, and the width is ∆x. This width will
become arbitrarily small with the integration.
Theorem 194 (Shell Method). The volume of a solid rotated about the y-axis under the
´b
curve y = f (x) from y = a to y = b is V = a 2πxf (x) dx.
Problem 195. Find the volume of the solid obtained by rotating y = 2x2 − x3 and y = 0
about the y-axis.
Problem 196. Find the volume of the solid obtained by rotating y = x and y = x2 about
the y-axis.
January 10, 2015
Auburn University
Hammer 66
Calculus II Lecture Notes
Problem 197. Find the volume of the solid obtained by rotating y =
from y = 0 to y = 1.
√
x about the x-axis
Problem 198. Find the volume of the solid obtained by rotating y = x − x2 and y = 0
about the line x = 2.
Suggested Homework: Section 6.3 numbers 2, 7, 9, 17, 19, 37
Auburn University
January 10, 2015
Chapter 8
Further Applications of Integrals
8.1
Arc Length
Goal 199. To find the length of a curve. That is to say that if there were a peice of string
laying right on top of the curve, and we straightened it out, how long would the string be?
Strategy 200. We will divide the interval we are interested in into n segments, just as we
did with Riemann Sums. Let Pk denote the k th point within the interval we are interested
in. Then the arc Length is
n
X
L = lim
d (Pi−1 , Pi ) .
n→∞
i=0
Moreover, let ∆yi = yi − yi−1 . Then we can express that distance as
q
q
(xi − xi−1 )2 + (yi − yi−1 )2 =
(∆x)2 + (∆yi )2
q
q
=
(∆x)2 + [f 0 (x∗i ) ∆x]2
=
1 + [f 0 (x∗i )]2 ∆x.
d (Pi−1 , Pi ) =
Putting this all together, we have
L = lim
n→∞
n
X
i=1
ˆ bq
n q
X
2
1 + [f 0 (x∗i )] ∆x =
1 + [f 0 (x∗i )]2 ∆x.
d (Pi−1 , Pi ) = lim
n→∞
a
i=1
The motivation for this can be seen in Figure 8.1
Theorem 201 (Arc Length). If f 0 is continuous on [a, b], then the length of the curve
y = f (x), a ≤ x ≤ b is
ˆ bq
L=
1 + [f 0 (x)]2 dx.
a
67
Hammer 68
Calculus II Lecture Notes
10
B
9
8
7
6
5
4
A
3
f
2
Figure 8.1: Arc Length
Problem 202. Find the length of the arc of the semi-cubical parabola y 2 = x3 between the
points (1, 1) and (4, 8).
Auburn University
January 10, 2015
Hammer 69
8.1. Arc Length
Problem 203. Find the length of the arc of the parabola y 2 = x from (0, 0) to (1, 1).
Theorem 204 (Arc Length Function). Let C be a smooth curve defined by y = f (x) from
x = a to x = b and let s(x) be the distance along C from the initial point P0 = (a, f (a)) to
the point Q = (x, f (x)). Then the arc length function can be obtained by evaluating
ˆ xq
1 + [f 0 (t)]2 dt.
s(x) =
a
1
Problem 205. Find the arc length function for the curve y = x2 − ln(x) taking P0 = (1, 1)
8
as the starting point.
Suggested Problems Section 8.1 numbers 1, 2, 5, 7, 8, 10, 11, 13, 14, 19, 20, 35
January 10, 2015
Auburn University
Hammer 70
8.2
Calculus II Lecture Notes
Area of a Surface of Revolution
Strategy 206. By the reasoning we have seen with the volume of surfaces of revolution as
well as with arc length, it shouldn’t be too surprising to see the following theorem
Theorem 207 (Surface Area). Let f be a positive function with continuous derivative. Then
the surface area of the surface obtained by rotating the curve y = f (x) from a ≤ x ≤ b
about the x-axis is
ˆ
q
b
2πf (x) 1 + [f 0 (x)]2 dx.
S=
a
√
Problem 208. The curve y = 4 − x2 from −1 ≤ x ≤ 1 is an arc of the circle x2 + y 2 = 4.
Find the area of the surface obtained by rotating this arc about the x-axis.
Problem 209. The arc of the parabola y = x2 from (1, 1) to (2, 4) is rotated about the
y-axis. Find the surface area.
Auburn University
January 10, 2015
8.2. Area of a Surface of Revolution
Hammer 71
Problem 210. Find the area of the surface generated by rotating y = ex from 0 ≤ x ≤ 1
about the x-axis.
Problem 211 (Gabriel’s Horn Pt. II). Find the surface area of the solid obtained by rotating
1
the curve y = about the x-axis from 1 to an arbitrary point a > 1. What happens as a
x
gets extremely large?
Suggested Homework: Section 8.2 numbers 5, 6, 7, 9, 13, 14, 16
January 10, 2015
Auburn University
Hammer 72
Auburn University
Calculus II Lecture Notes
January 10, 2015
Chapter 12
Vectors and the Geometry of Space
12.1
Operations in 3-Space
We have a lot to cover this semester; however, it is important to have a good foundation
before we trudge forward. In that vein, let’s review vectors and their geometry in space (R3 )
briefly.
12.1.1
Points
Definition 212 (Distance). Let P = (x1 , y1 , z1 ) and Q = (x2 , y2 , z2 ) be points in R3 . Then
the distance from P to Q, denoted d(P, Q) is
q
d(P, Q) = (x2 − x1 )2 + (y2 − y1 )2 + (z2 − z1 )2 .
Problem 213. Show that (x − y)2 = (y − x)2 .
73
Hammer 74
Calculus II Lecture Notes
Definition 214 (Planes in R3 ). Planes in R3 are denoted as x = a, y = b, or z = c, where
a, b, and c are real numbers (henceforth we will denote the fact that a, b, and c are real
numbers as a, b, c ∈ R.)
Recall 215. A circle in R2 is defined to be all of the points in the plane (R2 ) that are
equidistant from a central point.
A natural generalization of this to 3-space would be to say that a sphere is defined to
be all of the points in R3 that are equidistant from a central point C. This is exactly what
the following definition does!
Definition 216 (Sphere). Let C = (h, k, l) be the center of a sphere. Then the sphere
centered at C with radius r is defined by the equation
(x − h)2 + (y − k)2 + (z − l)2 = r2 .
That is to say that this defines all points (x, y, z) ∈ R3 that are a distance r from the center
point of the sphere.
12.1.2
Vectors
Definition 217 (Vector). A vector is a mathematical object that stores both length (which
we will call magnitude) and direction.
Definition 218 (Vector Between Two Points). Let P = (x1 , y1 , z1 ) and Q = (x2 , y2 , z2 ) .
PQ) is defined by
Then the vector with initial point P and terminal point Q (denoted *
*
PQ = hx2 − x1 , y2 − y1 , z2 − z1 i .
Definition 219 (Vector Equality). Two vectors are said to be equal if and only if they have
the same length and direction, regardless of their position in R3 . That is to say that a vector
can be moved anywhere in space as long as the magnitude and direction are preserved.
Convention 220. For convenience, we use something called the position vector to denote
the family of vectors with a given direction and magnitude. The position vector, *
v =
hv1 , v2 , v3 i , is formed by making the initial point of the vector the origin, O = (0, 0, 0) , and
terminal point (v1 , v2 , v3 )
Definition 221 (Magnitude (A.K.A. Length or Norm)). Let *
v = hv1 , v2 , v3 i . Then the
*
*
*
magnitude of v (denoted |v| or sometimes kvk) is defined by
|*
v| =
Auburn University
q
v12 + v22 + v32 .
January 10, 2015
Hammer 75
12.1. Operations in 3-Space
12.1.3
Operations
Definition 222 (Vector Addition). Let *
u = hu1 , u2 , u3 i and *
v = hv1 , v2 , v3 i. Then
*
u+*
v = hu1 + v1 , u2 + v2 , u3 + v3 i .
Definition 223 (Scalar Multiplication). Let *
v = hv1 , v2 , v3 i and k ∈ R. Then
k*
v = hkv1 , kv2 , kv3 i .
Definition 224 (Unit Vector). A unit vector is a vector whose magnitude is 1. Note that
b by dividing by the magnitude of *
we can given a vector *
v, we can form a unit vector v
v.
*
That is to say, Let v = hv1 , v2 , v3 i . Then
1
b = * hv1 , v2 , v3 i .
v
|v|
Definition 225 (Standard Vectors). Any vector can be denoted as the linear combination
b = h0, 0, 1i . So given a vector
of the standard unit vectors bi = h1, 0, 0i , bj = h0, 1, 0i , and k
*
v = hv1 , v2 , v3 i , one can express it with respect to the standard vectors as
*
b
v = hv1 , v2 , v3 i = v1bi + v2bj + v3 k.
This text, however, will more often than not use the angle brace notation.
Definition 226 (Dot Product). Let *
u = hu1 , u2 , u3 i and *
v = hv1 , v2 , v3 i. Then the dot
product or Euclidean Inner Product as it is sometimes referred is
*
u·*
v = u1 v1 + u2 v2 + u3 v3 = |*
u| |*
v| cos (θ) .
u and *
v are orthogonal if and only if *
u·*
v = 0.
Theorem 227. Two nonzero vectors *
Problem 228. Show that if two non-zero vector are orthogonal then *
u·*
v = 0.
January 10, 2015
Auburn University
Hammer 76
Calculus II Lecture Notes
Definition 229 (Cross Product). Let *
u = hu1 , u2 , u3 i and *
v = hv1 , v2 , v3 i. Then the cross
product is the determinant of the following matrix:
b b b i j k *
u×*
v = u1 u2 u3 v1 v2 v3 u1 u3 u1 u2 u2 u3 b
bj + k
bi − = v1 v3 v1 v2 v2 v3 = hu2 v3 − u3 v2 , u3 v1 − u1 v3 , u1 v2 − u2 v1 i .
Observation 230. The cross product of two vectors *
u and *
v gives us a vector that is
*
*
orthogonal to both u and v.
Definition 231 (Equivalent to Cross Product). Let *
u = hu1 , u2 , u3 i and *
v = hv1 , v2 , v3 i.
Then the cross product can also be defined as
u×*
v| = |*
u| |*
v| sin (θ) .
|*
Problem 232. Show that is two non-zero vectors *
u and *
v are parallel if and only if *
u×*
v=*
0.
Suggested Homework: Section 12.1 numbers 4, 6, 7, 8, 10, 11, 12, 14, 15, 16
Section 12.2 numbers 3, 5, 13, 14, 15, 19, 21, 24, 26
Section 12.3 numbers 3, 5, 6, 7, 8, 9, 10, 11, 15, 17, 21, 27, 41, 42, 44
Section 12.4 numbers 1 − 3, 17, 19, 28, 29, 33, 35
Auburn University
January 10, 2015
Hammer 77
12.5. Equations in 3-Space
12.5
Equations in 3-Space
Equation 233 (Parametrization of a Line). Let O = (0, 0, 0) be the origin in R3 , P0 =
(x0 , y0 , z0 ) be a point in R3 , and *
v = hA, B, Ci be a vector in R3 parallel to the line being
v is
parametrized. Then the line through P0 parallel to *
*r(t) = *
OP0 + t*
v
t ∈ R.
This can also be written as
x = x0 + At,
y = y0 + Bt,
z = z0 + Ct
t ∈ R.
or as the symmetric equation
x − x0
y − yo
z − z0
=
=
.
A
B
C
P
v
c
Figure 12.1: Parametrization of a Line
Equation 234 (Parametrization of a Line Segment). Let O denote the origin, P be the
initial point of a line segment, and Q be the terminal point of a line segment. Then the line
segment P Q can be parametrized as
*r(t) = (1 − t)*
OP + t*
OQ
0 ≤ t ≤ 1.
Q
P
Figure 12.2: Parametrization of a Line Segment
January 10, 2015
Auburn University
Hammer 78
Calculus II Lecture Notes
Problem 235. Find a vector equation and parametric equation for the line that passes
through the point (5, 1, 3) and is parallel to the vector h1, 4, −2i .
Problem 236. Find the parametric Equation of the line segment from (2, 4, −3) to (3, −1, 1).
n = ha, b, ci be a
Equation 237 (Planes). Let P0 = (x0 , y0 , z0 ) be a point in the plane and *
vector normal to the plane. Then the equation of the plane is
a (x − x0 ) + b (y − y0 ) + c (z − z0 ) .
Suggested Homework: Section 12.5 numbers 3, 4, 6, 7, 17, 19, 24, 27, 31, 32
Auburn University
January 10, 2015
12.6. Cylinders and Quadric Surfaces
12.6
Hammer 79
Cylinders and Quadric Surfaces
Definition 238 (Cylinder). A cylinder is a surface that consists of all lines that are parallel
to a given line and pass through a given plane curve.
Problem 239. Sketch y = x2 in R3 .
Problem 240. Sketch x2 + y 2 = 1 in R3 .
Problem 241. Sketch y 2 + z 2 = 1 in R3 .
January 10, 2015
Auburn University
Hammer 80
Calculus II Lecture Notes
Definition 242 (Quadric Surface). A quadric surface is the graph of a second-degree
equation in three variables x, y, and z. By translation and rotation, we can write the standard
form of a quadric surface as
Ax2 + By 2 + Cz 2 + J = 0
or
Ax2 + By 2 + Iz = 0.
Definition 243 (Trace). The trace of a surface in R3 is the graph in R2 obtained by allowing
one of the variables to be a specific real number. For example, x = a.
Problem 244. Use the traces of the quadric surface to sketch x2 +
y2 z2
+
= 1.
9
4
Problem 245. Use the traces to sketch z = 4x2 + y 2 .
Auburn University
January 10, 2015
12.6. Cylinders and Quadric Surfaces
Hammer 81
Problem 246. Sketch z = y 2 − x2 .
Problem 247. Sketch
x2
z2
+ y2 −
=1
4
4
Suggested Problems: Section 12.6 : 3 − 8, 11 − 20
January 10, 2015
Auburn University
Index
p-Series, 16
Absolutely Convergent, 20
Alternating Harmonic Series, 19
Alternating Series Test, 19
Arc Length, 67
Arc Length Function, 69
Area Between Curves, 58
Argument, 1
Integral Over Infinite Interval, 52
Integral Test, 15
Integration and Differentiation, 29
Integration by Parts, 35
Limit Comparison Test, 18
Limit of a Sequence, 5
List Of Series Tests, 23
Bounded Sequence, 9
Maclaurin Series, 31
Magnitude, 74
Monotone Sequence, 8
Circle, 74
Conditionally Convergent, 20
Contrapositive, 2
Converse, 2
Cross Product, 76
Cylinder, 79
Negation, 1
Non-Decreasing Sequence, 8
Non-Increasing Sequence, 8
Norm, 74
Decreasing Sequence, 8
Direct Comparison Test, 17
Disc Method, 61
Distance, 73
Divergence Test, 14
Dot Product, 75
Equivalent to Cross Product, 76
Fibbonacci Sequence, 4
Fundamental Theorem of Algebra, 47
Gabriel’s Horn Surface Area, 71
Gabriel’s Horn Volume, 63
Geometric Series, 8, 11
Harmonic Series, 13
Increasing Sequence, 8
Integral Comparison Test, 56
Integral Over Discontinuous Interval, 54
Parametrization of a Line, 77
Parametrization of Line Segment, 77
Partial Sum, 10
Plane (Equation), 78
Planes in R3 , 74
Position Vector, 74
Power Series, 26
Power Series Centered at a, 26
Proposition, 1
Quadric Surface, 80
Radius of Convergence, 27
Ratio Test, 21
Root Test, 22
Sandwich Theorem, 5
Scalar Multiplication, 75
Sequence, 3
Sequence Convergence, 5
Sequence Divergence, 5
Series, 10
82
Index
Hammer 83
Series Convergence, 10
Series Divergence, 10
Series Sum, 10
Shell Method, 65
Sphere, 74
Squeeze Theorem, 5
Standard Vectors, 75
Structure of an Argument, 1
Subset of Continuous Function, 5
Surface Area, 70
Tautological Equivalence, 2
Taylor Series, 31
The Binomial Series, 33
Trace, 80
Truth Table, 1
Unit Vector, 75
Vector, 74
Vector Addition, 75
Vector Between Two Points, 74
Vector Equality, 74
Vector Length, 74
Volume of Cylinder, 61
Washer Method, 64
January 10, 2015
Auburn University