4 Hull Structure - Aalto University Wiki
advertisement

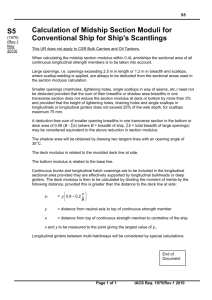
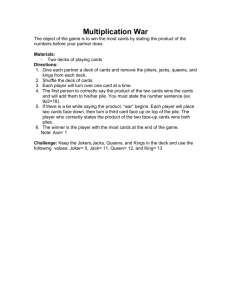
4 Hull Structure 4.1 Main frame and general arrangement 4.1.1 Frame spacing Usually ships with length over 120 m are considered long ships, and it is desirable to adopt longitudinal framing system. The system is designed to withstand longitudinal bending moments, which are dominant in long vessels. Although icebreakers are different case because of high ice loads and icebreakers tend to have a mixed framing structure. [14] It's good for ship that needs good strength aspect. Because of the ice load she needs transverse framing system on bottom plate and sides because when there is a huge stress force not just one frame becomes overstrained. Angled or t­shaped stiffeners should be utilized. In general, stiffeners should be arranged so that they are perpendicular to the ice stresses. On the spoon­like bow, the framing should be however longitudinal, and ice ramming must be taken account in the strength calculations. Use of high­strength steels should be considered in critical places. [15] The spacing between frames is set to 600 mm with a web frame on every third frame, resulting in web frame spacing of 1800 mm. This relatively small transversal spacing is chosen because of high ice loads when operating in Kara Sea. The initial spacing between longitudinals will be the same 600 mm but the spacing in longitudinal girders is every sixth, so 3600 mm. [16] 4.1.2 Main frame The main frame of Valerian Albanov is chosen to be between frames 152 and 153. The initial main frame is shown on appendix 1 Main frame by the engine room. These frames are on the bow side of watertight bulkhead on frame 150. The main frame is located on the frame that cuts the ship at the main engine room. A vessel has a mixed framing. This is done because of high ice loads on shell. Another frame drawing will be taken between the frames 125 and 126 and shown in the appendix 2 Main frame by the moonpool. This is the area where the ships moonpool is located which makes it a critical point in design. There are space reservations made around the moonpool in the general arrangement phase. This allows to reinforce the structures around the pool. According to Ship Conceptual Design course our double bottom height is kept to be 1350 mm and double sides 1200 mm. Pillars are chosen to be on every second web frame and at the intersection of web frame and longitudinal girder. [17] As mentioned earlier, longitudinal girders are on every second side keel which means spacing 3600 mm. [16] All lightening holes are very initial. 4.2 Loads 4.2.1 Definition of load types Our definition of load types and their frequencies are presented in table 4.1. The most significant magnitude of loads are also presented in table 4.1 and their calculations are shown later. MPV Valerian Albanov will be designed for 20 years. It’s rather low design life, but conditions are so harsh in Kara Sea so on the other hand it will be better to make ship not too heavy. Table 4.1: Definition of Loads Definition of load Type of load Frequency Magnitude 1 2 3 4 Level ice Crane Ship own weight Docking period Impact Constant Constant Docking period Typical journey time When used Non­periodic Docking period 9,16 MPa 250 t 18850 t 5 Journey Typical journey time 61,76 kPa 6 Hydrostatic pressure Thermal loads Journey Constant 7 Wave loads Wave 8 Main engines Constant/vibrations Wave length period, ship speed Non­periodic 9 10 Tank pressures Anchoring Constant Impact/constant Random While anchored 85 kPa 11 Vibrations in structure Pods Vibrations Eigenfrequency of the structure Typical journey time 12 Journey 13 Stillwater Bending Moment Constant Non­periodic 546414 kNm 4.2.2 Pressures on decks The Valerian Albanov has five decks above the main deck, as shown in the appendix 1 Main Frame. According to general arrangement the pressures on decks above main deck will be more like in passenger ship. According to DNV and lecture notes we assume pressures on decks in living area to be 5kPa. Pressure on weather deck is calculated to be 27 kPa. (RMRS: 2.6.3.1) As in table 4.1 is mentioned, crane will create significant local load to weather deck on starboard side and approximately to frame 83. On deck 0 the heaviest mass is estimated to be TEU. When TEU is fully loaded it´s weight is 30,5 t. [18] This gives approximately pressure of 21 kPa. From RMRS (2.6.3.2) we get for platforms in the engine room the minimum that the design pressure is 18 kPa. But on the other hand, based on RMRS (1.3.4.2.1) the oil gathering tanks creates pressure of 85 kPa, which is significantly higher than in engine room area. Thus, based on same formulas, the pressure on tank top is 105 kPa. Also referring to lecture we can suppose that material thickness requirement for engine bed is 45mm. Under the circumstances, we have shown in the main frame sketch maximum pressures from different frames. 4.2.3 Pressures on hull Stillwater bending moment can be calculated according to DNV for the hogging and sagging situations amidships with formulas [33]: It gives with our values that our stillwater bending moment of MSO = ­ 406802 kNm (hogging) and MSO = 546414 kNm (sagging). The design pressure acting on the ship’s hull exposed to weather is determined according to RMRS: 1.3.2.1 [19]: p = pst + pw (4.2.1) where the pressure acting on the ship’s hull is divided to static and dynamic pressure. Static pressure or hydrostatic pressure is well known formula: (4.2.2) pst = ρgh and dynamic pressure in waterline can be presented as: (4.2.3) pwo = 5cwavax where cw is the wave factor and it is: cw = 10, 75 − (300−L 100 ) 3/2 (4.3.4) for 90 < L < 300 m and acceleration terms av and ax : v av = 0, 8 √0L ( 10L3 + 0, 4) + 1, 5 (4.3.5) ax = kx(1 − 2x L )≥0, 267 where kx is equal to 0, 8 in aft and 0, 5 in fore (4.3.6) The dynamic load gets the maximum value at the ship’s waterline. Pressures below and above waterline are considered separately. The static pressure is added to the dynamic load to calculate the total external pressure. Figure 4.1 Distribution of load pW over the hull. [21] In figure 4.1 is shown distribution of dynamic pressure pW on side shell. Values for those according to Valerian Albanov are presented in tables 4.1 and 4.2 where z[m] is the distance from waterline. Table 4.1 Pressure distribution below waterline. z [m] pw [kPa] 0 61,7 6 1,5 59,72 3,0 57,67 4,5 55,62 6,0 53,58 7,5 51,53 9,0 49,78 9,5 48,80 Table 4.2 Pressure distribution above the waterline. z [m] 0 1,0 2,0 3,0 4,0 5,0 pw [kPa] 61.77 55.85 49.94 44.03 38.12 32.21 For the total external pressure, the static pressure is added to the dynamic pressure below the waterline and presented in the table 4.3. The total load above the waterline is the dynamic pressure above waterline. Table 4.3. Total pressure distribution below waterline. z [m] ptot [kPa] 0 61.7 7 1,5 74.43 3,0 87.10 4,5 99.77 6,0 7,5 9,0 9,5 112.44 125.10 137.77 141.99 Ice pressures according to RMRS ice class ARC7 (RMRS: 3.10.3.2.1) [21] are divided into four regions for the side shell as presented in figure 4.2. Pressure distribution due to ice loads on shell are calculated and is shown in table 4.4. Figure 4.2 Regions of ice strengthening. [19] Table 3.4. Pressure distribution due to ice loads on shell. pA1 [kPa] pA1I [kPa] pB1 [kPa] pC1 [kPa] 9156 5711 3763 3763 4.2.4 Other determined loads Period of thermal load is supposed to be constant. It occurs when outside temperature is very cold, as it is in Kara Sea, and for instead HFO tanks are heated. There are other very hot spots inside the ship as well. Also thermal load peak might arise when outside temperature gets higher. The vessel´s one important mission is sea bed drilling and during this operation, vessel should be stationary. Therefore ship has big anchors and those creates high local loads to fore ship. Valerian Albanov has two Azipod electric pod propulsors. Those are doing very serious pressures and vibrations in aft part of the ship. Pod plants have to be thoroughly utilized so that ship can handle all pods and vibrations are keeped in the minimum. 4.3 Load analysis 4.3.1 Wave spectrum As we know that the vessel is for very multipurpose operation it is reasonable to use North Atlantic as a design area. Most recommended wave spectrum for North Atlantic is Pierson­Moskowitz. [22] Pierson­Moskowitz can be defined with many different formulas. We tried different ones and two of those are presented as formula 3.3.1 [22] and formula 3.3.2 [22]. S(ω) = 0, 7795/ω5 * EXP (− 0, 74 * (g/ω/U)4) 2 4 −5 1 2π 4 −4 S(ω) = H4π s ( 2π T z ) ω exp(− π ( T z ) ω ) (4.3.1) (4.3.2) where ω is angular wave frequency, H_s is the significant wave height and T_z is the average zero up ­crossing wave period. In first formula is also U which is wind speed but we didn’t found any accurate wind data so we chose formula 3.3.2. Formulas from book Dynamics of a Rigid Ship [24] were also tried but when we chose IACS data, we also used equation given there. The probability of occurrence is assumed to be 0,2 according to BMT´s Global Wave Statistics given in lecture. [22] This means period of 12,5 s and significant wave height 16,5 m which is the biggest wave height from table and with highest probability. We don’t know yet our actual RAO and there aren’t available information about those for our reference ships or not even for similar ships. We decided to choose RAO for MV Arctic from lecture notes which transfer function is shown in figure 4.3. It isn’t similar for our ship but it is better guess than nothing. We maked a similar approximation curve to Excel and used values from that. With those values we can calculate our approximation response in waves with well­known relation (from lecture notes): Syy = Sxx * RAO (4.3.3) Figure 4.3: Transfer function for MV Arctic When we have calculated response, we can calculate spectral moment m with formula: ∞ mk = ∫ ωkS(ω)dω (4.3.4) 0 where we used Simpsons rule for numerical integration. In appendix 3 Wave Spectrum is shown our calculation table. There can be also seen diagram for wave spectra, transfer function, RAO and for response. 4.3.2 Three hour maximum for the bending moment The extreme value for Gaussian process can be calculated with formula [25]: √ √ T 2 * ln( 2π (60)2 m2 √ m0) m0 (4.3.5) where spectral moments m0 and m2 are from appendix 3 Wave spectrum. Spectral moments are calculated with wave spectrum and RAO. Three hour maximum for Valerian Albanov is then 357364,0 kNm. 4.3.3 Ship response based on Bonjean curves In appendix 4 Bonjean curves is shown spreadsheet tool for calculating Bonjean curves, still water bending moment and still water shear force. Tool uses Simpson Rule for numerical integration where one frame is divided to five parts. Then is calculated a displacement which obviously leads to force. Prohaska method is used for estimate initial weight distribution. [26] The input data to spreadsheet is taken from DelftShip. We got half­breadth information only below waterline and that is why tool does not calculate frame area above waterline. Thus we have calculated forces only in still water (T = 9,5m). The tool is later easily expanded to take into account also volume above water line. This makes it possible to put Bonjean curves with respect to wave and calculate for example a simple sagging situation. Tool would be much better if vessel could have been divided into twenty sections which is recommended. [27] Nevertheless it seems that at least displacement based on Bonjean curves very close to our design displacement, as shown in table 4.5. In that case we can keep this tool reliable. Table 4.5. Comparison of displacements Design displacement Bonjean curves displacement 23747 m^3 24219 m^3 However, when comparing still water bending moments based on Bonjean curves and DNV estimates, somewhat big errors occur. See table 4.6. Earlier the SWBM is calculated with DNV rules for still water bending moment in hogging and sagging amidships. This formula makes it estimation based on length, breadth and block coefficient. [28] Table 4.6. Comparison of still water bending moments SWBM Bonjean curves SWBM DNV (hogging) 350780 tonm 61419.4 tonm This error in table 4.6 seems to be so big that before trust these results further calculation is needed. 4.3.5 Problems of defining design loads with RAO Defining Response Amplitude Operator (RAO) is extremely difficult to calculate in the early phase of design. Defining RAO requires a quite complete model of the ship or significant amount of time domain simulations. Second problem concerning the load definition with the RAO is in the long term response analysis. Finding the worst case wave spectrum corresponding to ship’s RAO in long term analysis might be challenging. 4.4 Plates and stiffeners 4.4.1 Beam and plate bending response The beam and stiffener bending response is calculated through an application of Euler­Bernoulli beam theory. The theory combines the internal response of the beam and the external load on a small beam element. The equilibrium between these two gives the differential equation for the line load as function of displacement. The classification society rulebooks apply the same theory resulting in a formula that defines the minimum section modulus of plate and stiffener together [29]. (4.4.1) Where the maximum allowable stress σ = 160 f1 = 160 MPa. The rulebook defines minimum plate thickness for different structural parts including deck plating in bottom structure, tank top, machinery deck and weather deck. The minimum plate thickness for decks [29]: (4.4.2) But not to be below [29]: (4.4.3) Table 4.7. The corrosion addition tk. [DNV: Rules for Ships, July 2012 Pt.3 Ch.1 Sec.2 – Page 23] For the side structures the ice loads are the significant factor defining the scantlings for different structural members. The shell plating and stiffener size will be calculated according to ice rules of RMRS for ship with ice class Arc7. [31: Formulas (3.10.4.3.4 and (3.10.4.5.1)] 4.4.2 Dimensions for plates and stiffeners Table 4.8. Plate thickness for different decks according to formulas 12.1.2 and 12.1.3. Flat bottom Deck ­2 Tank top Deck ­1 Engine room Deck 0 Storage Deck 1 Main deck Deck 2 Laboratory Deck 3 Gym/Sauna k a 1 1 1 s [m] p [kPa] 142 105 85 σ [MPa] tk [mm] tplate, rule [mm] 235 3,36 17,63 160 3 10,68 160 2 8,91 tselected [mm] 18,0 11,0 9,0 0,6 0,6 0,6 1 1 1 1 0,6 0,6 0,6 0,6 21 27 5 5 160 160 160 160 8,0 8,0 7,0 7,0 1 0,5 0,5 0,5 7,38 7,88 6,88 6,88 Deck 4 Cabins Deck 5 Cabins Deck 6 Bridge 1 0,6 1 0,6 1 0,6 5 5 5 160 160 160 0,5 0,5 0,5 6,88 6,88 6,88 7,0 7,0 7,0 After selecting the plate thicknesses for different decks, we start to choose stiffeners from Ruukki [30] and check the section modulus according to rulebook (formula 3.4.1). According to lecture, HP­profile is very efficient profile for stiffeners and is very often used in ships. When profile was selected, we compared our calculated section modulus values to DNV’s rules and after that to Ruukki’s table where stiffener profile is selected according to section modulus. These calculations are presented in the table 4.9. The web frame span l = 1,8m ; longitudinal spacing s = 0,6m ; design stress σ = 160 MPa are the same for all the deck and therefore not presented in the table. In table 4.8 the thickness for flat bottom is calculated by RMRS 2.2.1. Table 4.9. Stiffener selection and section modulus calculation. Zrule [cm3] Flat bottom Deck ­2 Tank top Deck ­1 Engine room Deck 0 Storage Deck 1 Main deck Deck 2 Laboratory Deck 3 Gym/Sauna Deck 4 Cabins Deck 5 Cabins 143,2 105,9 85,7 21,2 27,2 15,0 15,0 15,0 15,0 Profile selected HP180x9 HP160x8 HP160x7 HP100x5 HP100x5 HP100x5 HP100x5 HP100x5 HP100x5 Ztop, selected [cm3] Zbottom, selected [cm3] 210,8 1324,0 138,3 788,6 129,0 688,3 38,9 314,8 38,9 314,8 38,4 293.7 38,4 293.7 38,4 293.7 38,4 293.7 Relatively short web frame span (l=1,80 m) results in quite low section modulus requirement from the rulebook. This again results in specific minimum section modulus requirement for the upper decks which is Z = 15 cm3. Plate thickness for shell plating in the four icebelt regions: A1 Fore, A1l Fore shoulder, B1 Mid Body and C1 Aft is determined in the table 4.10. It is chosen that Valerian Albanov has additional ice frames in ice belt area. This leads to frame span 0,3m in ice belt and reduces section modulus requirements significantly. Preliminary is chosen that ordinary frame is the same profile that ice frame through the vessel. Stiffener selection is shown in table 4.11. For mid and aft part of icebelt, HP­profile is chosen but for fore icebelt is chosen L­profile because of given section modulus, all Ruukki’s HP­profiles are too small. Table 4.10. Icebelt shell thickness. p [kPA] u (corrosion reduction) [mm] trule [mm] tselected [mm] A1 Fore A1l Fore Shoulder B1 Mid Body C1 Aft 9156 5711 3763 3763 0,50 0,50 0,35 0,35 51,88 42,55 33,70 33,70 52 43 34 34 Table 4.11. Stiffener profiles for side shell. A1 Fore Zrule [cm3] 2529,36 A1l Fore Shoulder 1577,67 B1 Mid Body C1 Aft 1039,53 1039,53 Profile selected Ztop, selected [cm3] Zbottom, selected [cm3] L­profile 350x40x100x4 0 L­profile 250x40x100x4 0 HP 370x13 HP 370x13 2680.31 4870.69 1646.22 2948.59 1566.58 1566.58 3559.08 3559.08 Plate thicknesses on side shell below and above the ice belt is calculated by RMRS 2.2.1 and 1.6.4.4 are shown in table 4.12. Pressures are the same ones that were calculated earlier. RMRS calculates the corrosion addition according to operational years which is considered to be RMRS default 24 years. Table 4.12. Plate thickness below and above ice belt p [kPA] Above ice belt Below ice belt 61,78 112,4 u (corrosion reduction) [mm] 3,4 3,4 trule [mm] tselected [mm] 12,8 16,0 13,0 16,0 Initially it is chosen that above the ice belt is 13,0 mm plate and below 16,0 mm, until the flat bottom plate. Bottom shell is chosen to start before bilge radius at point Z=5,5m and the thickness is supposed to be constant. 4.5 Web frame and girder bending 4.5.1 Design principles For the web frame and girder bending, the same Euler­Bernoulli beam bending theory is applied as with the plates and stiffeners which is taken into account in DNV formula [32]: Z = 83l2 spwk σ (4.5.1) After knowing the section modulus requirement and the plate thickness we can try out different sized beams and calculate the actual section modulus for these plate and beam combinations. The final selection will be a beam that fulfills the rulebook requirement and has small reserve compared to the requirement. With the web frames and girders the shear lag effect needs to be taken into account which means calculating the effective breadth be for all the beams. For example for girders which are supported by pillar lines, using pillar line spacing as b would result in too high section modulus. With the effective breadth concept we can evaluate the effective flange of the girder. The effective breadth, be, is determined by simplified approach of the rulebook [32]. With this method the web frame spacing, load and the boundary conditions define the be. be = Cb (m) (4.5.2) where b = sum of plate flange width on each side of girder and C from table 4.13. Table 4.13. C­values [29] As the design loads for this ship are defined as pressures the number of point loads will be considered r ≥ 6 for all the situations. Distance between points of zero moments is a and depends on the boundary conditions, whether the beam has clamped support in the ends or freely supported or a mix of these. For the three cases moment equations are shown in the figure 4.4. With these equations we can calculate the a distances (between points of zero moment): afree = l (7.1.3) aclamped = √l3 (7.1.4) amixed = 3l4 (7.1.5) Figure 4.4. The 3 different moment equations. We can consider the girders and web frames to be clamped due to continuity of the structures everywhere except in the side shells and double bottom where the beams are welded to the side or bottom plate. 4.5.2 Web frame and girder selection Selection will be carried out by calculating the DNV section modulus requirement. The deck pressures vary and are evaluated earlier. The different spans need to be taken into account, for web frame spacing 1,6 m and girder span 3,2 m. Once we have the requirement we select a beam that gives approximately 10% higher section modulus than the requirement. Material that will be used is normal strength steel with upper yield stress REH = 235 MPa. Calculations are shown in the appendix 6.2 and 6.4 Structural calculations. Because the side conditions for the middle deck parts give higher requirements for section modulus (shorter span), the web frames for the whole deck breadth are selected according to the middle part. This results in same sized web frame for the whole ship breadth. The same method will also be applied for the longitudinal girders. The girders will also be chosen with the same height as the web frames to create same height intersections for pillars. In the double bottom there will be no T­beams but plates along the whole double bottom height. Thickness of these floor plates (transversals) and girder plates (longitudinals) will be calculated according to separate DNV rules. Both floors and girders have the same span of 1,6 m. In the double bottom the corrosion factor will be 3 due to the fact that area will be used as ballast water tank. The final results are shown in the appendix 6.1 Structural calculations. For the double side the ice pressures determine the I­beams used in the ice belt area. The beams selected are shown in the appendix 6.3 Structural calculations. 4.6 Hull girder response 4.6.1 Normal stress response in bending The hull girder bending response is evaluated by calculating the section modulus for the midship structure. The rulebook gives two minimum requirements for section modulus where first one is not depending on water bending moment: (4.6.1) where the value for CWO is taken from rulebook table. For a ship with 130 > L > 140 the CWO = 8.53. The second requirement: (4.6.2) where σ1 = 175 f1 = 175 MPa with our normal strength steel and within 0.4L amidships. The calculations for the actual midship section modulus and neural axis are presented in appendix 7 Section modulus. There have been made some simplification when calculating the section modulus. For example HP­profile is taken as a flat bar and neutral axis for HP­profiles are simplified. 4.6.2 Vertical distribution of normal stresses The vertical distribution of normal stress is obtained for the midship section by using the maximum bending moment calculated earlier. The bending moment was obtained with bonjean curves, prohaska ­weight estimation method and with a wave condition applied on the curves. MSW = 436209 kNm MW = 37196 kNm Figure 4.5: Vertical normal stress distribution. Above on figure 4.5 is shown the normal stress distribution in hogging situation. 4.6.3 Shear stress distribution Shear stresses might cause additional and significant deflections in beams with L/h ratio lower than 10. (4.6.3) where shear force Q caused by the external load on structure induces shear stress on the shear area. The rulebook gives again a simplified approach where the distribution of the shear force is given for different cross sections of the midship. The table 4.14 indicates values for shear force distributions depending on the ships longitudinal bulkheads. For Valerian Albanov, shear stress distribution is calculated with using Bonjean Curves table and is shown in appendix 4 Bonjean Curve. Table 4.14. Shear force distribution factor Φ according to DNV [33]. While knowing how much bulkhead takes of shear force Q by using Φ we can evaluate the stress with the formula: τ= Q A = Φ(QSW +QW ) h * b (4.6.4) 4.6.4 Stress levels We realize that the normal stress estimation for the ship cannot be exactly correct due to fact that the superstructure is neglected. However in this case it does not produce problem because the superstructure only stiffens the fore ship. Normal stresses for the hull are considerably lower than allowable stress level. Material used for the superstructure will be normal strength steel but with higher brittle strength. The normal stress levels are relatively small with the estimated loads. It means that the ship has high safety factors in relation to the normal stresses. Perhaps this is something to consider in the optimization phase of the design. The shear stresses will not produce any significant problems for the ship due to the facts that ship can considered as closed cross­section and ship beams have high L/h ratio (>10). 4.6.5 Torsion Torsion is very critical when structure is open. For example, when there are openings like hatch opening in bulk carriers. We don’t have hatch openings on the main deck and our structure is more or less closed. But we have moon pool which can be very critical due to the torsion. Torsion is becoming more critical when ship is longer than Valerian Albanov. In our case, ship can been handled more or less like thin­wall closed section. Then there is relation, known as Bredt’s formula, that angle of twist is given with formula [34]: 1 Θ = 2GA ∮ τxs ds C0 (4.6.5) where G is the Young’s modulus, A is area within the centerline and τxs is shear stress. When wall thickness t is a constant, Eq. (15.5.1) can be shown in much easier form (Parnes 12.10.15b): Θ = 4ATS2Gt (4.6.6) where S is the perimeter along the centerline. Now we can see that if we have a torque affecting on ship, the angle of twist is smaller if we have high Young’s modulus and the structural arrangement area is big and thick. Starting point is obviously that the structural arrangement is continuous through the whole ship and the structure is closed. Material which is used is very important and in critical places should consider to utilize materials with higher Young’s modulus. In moon pool area should been made very careful structural arrangement and thinking also strengthening materials around moon pool hole. The internal torsion moment is also in equilibrium with the external moment. [35]. According to that, weather and sea conditions has the biggest impact into torsion. Torsion strength should been calculated according to required weather conditions and also simulate torsions with 3D­model. 4.7 Vibratory response 4.7.1 Measures to control vibratory levels In Valerian Albanov vibratory sources are: ­ main engine (Wärtsilä Genset 38, 600 rpm) ­ pods and the propeller (4 blades, D = 5,5m) ­ wave slamming loads due to the inefficient bow shape (whipping) ­ ice loads (whipping) ­ springing is more critical on ships with large L/B ratio (cruise ships) and it is not critical in Valerian Albanov. These sources will induce vibratory wakes with different frequencies. We need to identify the most critical ones with the highest energy. Once we have identified the critical ones, we will decide the critical frequency value. This value defines the minimum value for the eigenfrequencies of the plates, stiffeners and girders, otherwise the risk of resonance with the critical vibrations is severe. It is impossible to estimate all the possible wakes induced by the ship or it operations. This is why the critical frequencies are identified and the risk of resonance excluded by setting the minimum eigenfrequency for structural parts. Figure 4.7. Response spectrum. As calculated in the earlier assignment and also shown in the figure 4.7, the critical wave frequencies are less than 1 Hz. For the propeller induced wake we can do a rough estimate [37] from knowing the blade number and revolutions. In our case the blade number is 4 and propeller revolution 110 rpm. This results in: ω = Z n/60 = 4 * 110/60 = 7, 33 Hz (4.7.1) The main engine induces wake of frequency around 10 Hz. For the ice induced wakes we refer to Belov’s studies on the icebreakers Sankt­Petersburg and Arktika [36]. The studies show that most critical vibrations are generated at the frequency range of 0 ­ 12 Hz. By taking account all the major wake sources we define that the minimum frequency value for the structural members is set fcr = 15 Hz. It means that all structural members need to be designed to have higher eigenfrequency than fcr. The higher frequencies than the critical one will be damped by utilizing the conventional methods in ships: ­ insulation foam or other material on decks, sides and bulkheads ­ damping elements ­ for main engine vibrations there is different corrective actions, for instead balancing flywheel. [38] 4.7.2 Eigenfrequencies for plates, stiffeners and girders The eigenfrequency for simply supported beams is calculated by: ω = λ2√EI/m (3.7.2) where mass, m is area mass of the beam and λ=π/L for the simply supported beam. We are only considering mode 1 wave for the beam which corresponds in the highest frequency (worst case scenario). Eigenfrequencies for the beams are presented in the table 4.15. The eigenfrequency for the plates is calculated by: ω= λ a2 √ Eh3 12m(1−ν2) (4.7.3) The λ for the plate case depends on the support type and wave mode but also on the a/b­ratio of the plate. Eigenfrequencies for the plates are presented in the table 4.16. The width of the plates is assumed to be the spacing between stiffeners. Table 4.15. Eigenfrequencies of stiffeners. STIFFENERS Bottom Deck ­1 Deck 0 Deck 1 Deck 2 Deck 3 Deck 4 Deck 5 Deck 6 Deck 7 L lamda [1/m] Area [m^2] [m] 1,8 1,75 0,013657 5 1,8 1,75 0,008364 1,8 1,75 0,007004 1,8 1,75 0,005529 4 1,8 1,75 0,005529 4 1,8 1,75 0,004929 4 1,8 1,75 0,004929 4 1,8 1,75 0,004929 4 1,8 1,75 0,004929 4 1,8 1,75 0,004929 4 I [m^4] Eigenfrequency [Hz] 0,0000536 157,97 0,0000296 0,0000271 0,00000526 150,01 156,85 77,77 0,00000526 77,77 0,00000512 81,27 0,00000512 81,27 0,00000512 81,27 0,00000512 81,27 0,00000512 81,27 Table 4.16. Eigenfrequencies of plates. PLATES Bottom Deck ­1 Deck 0 Deck 1 Deck 2 Deck 3 Deck 4 Deck 5 Deck 6 Deck 7 t [m] 0,018 0,011 0,009 0,008 0,008 0,007 0,007 0,007 0,007 0,007 Eigenfrequency [Hz] 12 021,42 2 743,57 1 502,68 1 055,38 1 055,38 707,02 707,02 707,02 707,02 707,02 From the eigenfrequency tables we can see that all the structural members have higher eigenfrequency than the critical one. 4.8 Buckling and Ultimate Strength 4.8.1 Buckling The critical buckling stress for plates, stiffeners, pillars and girders will be evaluated with the Euler’s theory for elastic buckling. For the members with low slenderness the Johnson’s parabola is taken into account. The theory is the same as given in the rulebook [39]: For the ideal compressive buckling stress σel the stiffeners, pillars and girders will be considered as beams and the plates will be treated differently. For the beams: and for the plates: where the factor k will be simplified to k = 4 due to fact that our ship is longitudinally stiffened and compressive loads are considered to be evenly distributed along the plate sides. With these formulas the critical buckling stresses are calculated and shown in the appendix 8 Buckling. Figure 4.8. Normal stress distribution In the figure 4.8 the stresses are calculated with the maximum sagging moment which can be considered to be the most critical situation. When comparing the acting stresses on the critical buckling stresses we notice that although all the acting stresses are below the buckling correspondents, the order of buckling is not what it should be. The plates are the first structures to buckle but after that the stiffener and girder have quite the same buckling stress. The order of stability loss should be plate, stiffener and after that the girder. This means that we must consider if the girder size in the deck ­1 should be increased or if the material should be high­strength steel. 4.8.2 Ultimate strength When estimating the ultimate strength of the hull girder, the procedure is done in a way that the acting moment is increased linearly to locate the critical positions where the yielding of the structure starts. If the ship structures follow the correct buckling hierarchy, the sequence of failures should be first the buckling of an unstiffened plate, next the buckling of the stiffener and for the last the buckling of the whole panel. The ultimate strength that the structure can carry is determined at the point where the whole cross­section of panel is plastic. It means that structural member does not have any load carrying capacity left and the structure fails. To estimate the ultimate strength in this ship first we need to check that the failing hierarchy of structures is correct. After that we can determine the sequence of failures and the acting moments that cause these failures to happen. Table 4.17. Order of failure in structures. Moments [MNm] 1 1900 2 3150 3 3200 4 3450 5 4100 6 5500 7 6200 Description of failure Buckling of plate in deck 1 Buckling of stiffener in deck 1 Buckling of girder in deck 1 First fiber yield of plate in deck 1 Buckling of plate in deck 0 Buckling of girder in deck 1 Buckling of stiffener in deck 0 From table 4.17 and figure 4.8 it can be observed that the hierarchy of buckling is as it should be. Deck 1 seems to be the most critical deck to be observed in point of ultimate strength. With the moment of 5500 MNm the girders at the deck 1 will start buckle, which will mean failure of the whole deck. The top most point of our ultimate strength curve is reached at the point where deck 1 is totally plastic and from there onwards the structures ability to carry higher loads will only decrease. It is also known that ship panels can carry higher loads than the buckling stress of simple plate and a stiffener due to effective width concept. In that case the stress will be concentrated close to area where the stiffener is attached. By applying this concept we could achieve more realistic values for plate buckling. But effective width is neglected in this case. With the conservative approach we know that some safety margin is left in the ultimate strength estimation. Figure 4.9. The sketch of the ultimate strength curve. 4.9 Fatigue and Fracture Strength 4.9.1 Fatigue In DNV’s classification notes no. 30.7 is presented simplified fatigue calculation method. Fatigue strength calculation is started with calculating the loads. In appendix 9 Fatigue is shown our calculation table where is calculated stress levels for each deck and structural member by applying the difference of wave induced hull girder bending moments. Wave induced hull girder bending moments are calculated as is shown in section 6.2.1. [40] After that we calculated wave induced vertical hull girder stress as: Stress concentration factor should be checked for different cases and choose the most critical one. We used 1,6 as a good average value. It varies a little bit for different cases like for the point where web frame is connected to deck, bulkhead to deck and for welded joints etc. We tried also different ones but it doesn’t change the results so much. For more accurate results it would be of course very important. Combined global and local stress range is calculated as shown in section 2.3.4 and now we have calculated loads and responses so we can use DNV’s damage calculation. The method combines Weibull distribution of long term stress range and a one slope SN­curve and is presented as: (4.9.1) For Valerian Albanov, N load is just one because of simplification, pn is something between 0,85 and 1, so 0,9 is a good guess. Design life T d for Valerian Albanov is 20 years and weibull stress range shape distribution parameter hn is calculated for deck longitudinals when hn = h0 and h0 : (4.9.2) Shape parameter value for Valerian Albanov is then 1,05. For more accurate results we should calculate also shape parameter for ship side above, below and at the waterline and for bottom longitudinals and for bulkheads. Because of simplification, method is enough accurate. The Weibull scale parameter can be defined from the stress range level, Δσ0 , with formula: (4.9.3) where η0 is the number of cycles over the time period for which the stress range level Δσ0 is defined. With high cycle fatigue we used 0,7*10^8. We have to do some simplifications for fatigue calculations, so we can use the zero­crossing frequency as: (4.9.4) where L is the ship Rule length in meters. For Valerian Albanov ν = 0,117. Gamma function is described with: (4.9.5) where m is S­N fatigue parameter. When we are calculating SN1 for welded joints we can use according to lecture notes that m is 3,0 and now we get from table G­1 [40] that our gamma function value is 5,029. Now we can calculate fatigue damage value for different case. Our calculation table is shown in appendix 9 Fatigue. There have been made simplifications as mentioned earlier so the most reliable result is for deck 1 and its stiffeners which gives damage factor 0,014 for the deck and 0,019 for the stiffeners. Reliable is coming from the fact that we were calculating deck longitudinals with proper stress concentration factor. Results seems to be reasonable also and it is a lot less than η = 1 . [41] 4.9.2 Material grades As the ship is designed to work in extremely cold conditions (up to ­40 C) the risk of brittle fracture is high. In the first chapter the material grades for the ships were chosen according to rulebook [42]. All steels used will be normal strength steel with minimum yield strength of 235 MPa. This was already chosen earlier and utilized in allowable stress calculation for NV­NS: f1 = 1,0. To keep the manufacturing efficiency on a good level, the selection of material grades should contain as few different materials as possible. This simplifies the selection as the cold temperature sets requirements for the materials used. For all the exterior members of structure the steel grade E will be used due to cold ambient air temperature. For the interior structures the grade A will sufficient according to the rulebook (interior plate thicknesses < 15mm). Table 4.18. The material grades according to DNV [42]. 4.10 Partial safety factors of MPV Valerian Albanov Comparing the strength of the ship to the loads induced by the sea and operation we can determinate the safety of the ship. Literally safety means that the strength (capacity) is bigger than the load (demand). This can be shown mathematically as a limit­state function: G(X) = C (X) − D(X) (4.10.1) where C is capacity and D is load. Vector X states all statistical factors, eg. external loads, material properties and geometrical properties. Thus the difference between capacity and demand is called safety margin. This is shown in the figure 4.10. Safety margin is depending on how much bigger material strength is due to the design load. So if there is bigger maximum load than is planned to be, material has still some reserve to take the load. Figure 4.10. Probability distribution of load and capacity. The rulebook has established a formula that combines the design loads to the satisfactory strength level of the hull [43]: (4.10.2) where MUI is the hull girder bending moment capacity, MS is the maximum design still water bending moment and MW is the design wave induced bending moment. And where γM = 1,15 and γW1 = 1,1. According to this formula we can compare the design load level to the ultimate hull girder bending moment capacity and calculate the partial safety factor. In our case the MUI will be limited by the yield strength of the material. The maximum bending moment capacity is the moment that causes first yielding due to normal stress in the midship. With bending moment MUI = 3450 kNm local nominal stress at the deck 1 exceeds the yield strength of the deck which is the first yielding thus giving us the maximum capacity of bending moment. The maximum moments for still water and wave conditions are acquired with Bonjean curves. Based on Bonjean Curves we get in MS = 436,2 MNm and MW = 368,7 MNm. Now applying the values to the rulebook formula we get: 436,2 MNm + 1,1 x 368,7 MNm ≤ 3450 kNm/ 1,15 860253,1 MNm ≤ 3136363,64 MNm Which resulting to safety factor of 3,6. 4.10.1 Reliability Structures are never absolutely safe. Giving an absolute maximum value for example on a wave load is impossible due to the fact that forces of nature have no upper limit. The aim for good design is to create a structure which fulfills the needed requirements with acceptable risk limits. The most efficient solution has a ´right´ level of risk. Typical examination is done in level 2 where is taken into account only the mean values and standard deviations. [44] In real case the loads from environmental as well as hull girder response are not statistically independent, which means that occurrence of load does not affect to probability to capacity. Since the hull girder bending moment depends on flow around the hull this can make a non­linear problem. As mentioned, based on DNV the Valerian Albanov´s hull girder has a safety factor 3,6 which is considerably high and leave room for major optimization. Good value for safety factor with respect to yield strength is 1,35. [45] 4.10.2 Optimization of MPV Valerian Albanov During the σ3 ­level design of the structures, a margin was left between the rule requirement and actual stiffener selection. This gives reason for optimization since we have noticed that nominal normal stresses of the main frame do not exceed the material strength. By only looking the normal stresses, room for optimization is excessively but we have to remember that structures must fulfill the requirements set by buckling, vibrations and fatigue. Also by working according the DNV rules the minimum plate thickness and section modulus requirements are already quite close to minimum. Applying new stiffeners for every deck so that rule requirement is fulfilled narrowly is presented in table 4.19. Table 4.19. Optimised stiffener selection. Zrule [cm3] Flat bottom Deck -2 Tank top Deck -1 Engine room Deck 0 Storage Deck 1 Main deck Deck 2 Laboratory Deck 3 Gym/Sauna Deck 4 Cabins Deck 5 Cabins New profile Ztop, selected [cm3] 143,2 105,9 85,7 Old profile selected HP180x9 HP160x8 HP160x7 Zbottom, selected [cm3] HP 160x8 HP 140x9 HP 140x7 148.35 105.73 93.02 1050.47 642.72 564.62 21,2 27,2 15,0 15,0 15,0 15,0 HP100x5 HP100x5 HP100x5 HP100x5 HP100x5 HP100x5 I 100x6 I 100x8 I 100x5 I 100x5 I 100x5 I 100x5 21.23 27.96 17.51 17.51 17.51 17.51 208.08 229.79 186.33 186.33 186.33 186.33 Now we input the new values in the table of stresses at the main deck to check that stress levels are within the allowable range. It is clear that with these actions the acting stress levels have increased only a little bit and there is still no risk of exceeding the material strength levels. However some weight saving has been achieved through smaller stiffeners and the flat profile that has been used mainly is also cheaper than originally chosen Holland profile. Another effect of the modification is that neural axis of the main frame is 50 mm higher than the original. 4.11 Moonpool structure In the general arrangement design, space was reserved for moonpool and it’s surrounding structures. The moonpool itself has the size of 7,5m x 4m. The surrounding structures have at least 1,5 meters of space to fulfil the same requirements than the side structures. Although the loads in the moonpool are not as high as in the side shell. DNV does not give any special requirements for the moonpool so applying the same strength than in side structures is estimated to be enough. Appendix: 1. Main Frame by the main engines 2. Main Frame by the moonpool 3. 4. 5. 6. 7. 8. 9. Wave Spectrum Bonjean Curves Structural Calculations ­ Stiffeners Structural Calculations ­ Double bottom, Girders, Side structures, Web frames Section Modulus Buckling Fatigue References: [14] Ship Conceptual Design: Lecture 9 [15] Lamb 2004, chapter 40.2.2 [16] Räisänen Pekka: Laivatekniikka, 2000: 29­27. [17] Ship Structural Design: Lecture 2 [18] http://www.interfreight.co.za/container_information.html [19] Ship Design and Construction: SNAME 1980, Taggart R., section 4.1: Design Loads. [21] RMRS 2012 Vol 1, Part II, 1.3 Design loads [22] IACS 2000: NO.34 Standard Wave Data. [23] Alanko Jussi, Laivan yleissuunnittelu, 3rd edition 2011, ISBN 978­952­92­1492­1 [24] Matusiak Jerzy, Dynamics of a Rigid Ship 2013 [25] Ship Structural Design: Lecture 3 [26] Daley C.: Lecture Notes for Engineering 5003 – Ship Structures I: page 46 [27] Daley C.: Lecture Notes for Engineering 5003 – Ship Structures I: page 44 [28] Ship Design and Construction: SNAME 1980, Taggart R., section 4.1: Design Loads. [29] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.6 [30] Ruukki: Hot Rolled Shipbuilding profiles [31] RMRS Rules for the Classification and Construction of Sea­Going Ships, 2010 Vol 1, PART II Hull, 3.10 Strengthening of ice ships and icebreakers, pages 180­186 [32] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.3 [33] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.5 [34] Parnes, R: “Solid Mechanics in Engineering”, Wiley 2001 [35] Kul­24.4120 Lecture 7 [36] Belov M. Features of Ship Vibrations in Ice Operation Conditions [37] COMSOL. Eigenfrequency Analysis of a Rotating Blade 2013. http://www.comsol.fi/model/download/178339/models.sme.rotating_blade.pdf [38] Caterpillar: Application and Installation Guide: Vibration [39] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.13 [40] DNV CLASSIFICATION NOTES No. 30.7, June 2010 [41] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.16 [42] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.2 [43] DNV Rules for Ships, July 2012 Pt.3 Ch.1 Sec.15 [44] Kul­24.3600 Introduction to Risk Analysis of Structures: Lecture 6 [45] Kul­24.4120 Ship structural design: Lecture 11