Descriptive Geometry 1
advertisement

Descriptive Geometry 1
by Pál Ledneczki Ph.D.
Table of contents
1 Multi-view representation
1.
2. Shadow constructions
3. Intersection problems
4. Metrical problems
5. Axonometry
6. Representation of circle
7. Perspective
Introduction
About the purposes of studying Descriptive Geometry:
1.
Methods and “means” for solving 3D geometrical construction problems. In this sense
Descriptive Geometry is a branch of Geometry.
2.
2D representation of 3D technical object, i.e. basics of Technical Drawing, “instrument” in
technical communication.
What is Descriptive Geometry?
„One simply takes two planes at right angles to each other, one vertical and the other horizontal
then projects the figure to be represented orthogonally on these planes, the projections of all
edges and vertices being clearly indicated. The projection on the vertical plane is known as
tthe
e „e
„elevation”,
e at o , the
t e other
ot e projection
p oject o is
s ca
called
ed „t
„the
e plan”.
pa
Finally,
a y, the
t e vertical
e t ca plane
p a e is
s folded
o ded
about the line of intersection of the two planes until it also is horizontal. This puts on one flat
sheet of paper what we ordinarily visualize in 3D”.
(A History of Mathematics by Carl B. Boyer, John Wiley & Sons, New York, 1991)
Gaspard Monge (1746
1746 ― 1818) was sworn not to divulge the above method and for 15 years,
years it
was a jealously guarded military secret. Only in 1794, he was allowed to teach it in public at
the Ecole Normale, Paris where Lagrange was among the auditors. „With his application of
analysis to geometry, this devil of a man will make himself immortal”, exclaimed Lagrange.
R Parthasarathy
R.Parthasarathy
Descriptive Geometry 1
h
http://en.wikipedia.org/wiki/Gaspard_Monge
//
iki di
/ iki/G
d M
2
Introduction
About Descriptive Geometry 1
Methodology
Multi-view
Multi
view representation, auxiliary projections
Axonomety
p
Perspective
Types of problems
Incidence and intersection problems,
problems shadow constructions
Metrical constructions
Representation of spatial elements, polyhedrons, circle, sphere,
cylinder and cone
Descriptive Geometry 1
3
Introduction
In Descriptive Geometry 1
We shall study
representation of spatial elements and analyze their mutual positions
determine their angles and distances
represent pyramids, prisms, regular polyhedrons,
construct the intersection of polyhedrons with line and plane, intersection of
two polyhedrons
construct shadows
cast shadow, self-shadow, projected shadow
the p
principles
p
of representation
p
and solution of 3D g
geometrical
problems in 2D
Descriptive Geometry 1
4
Introduction
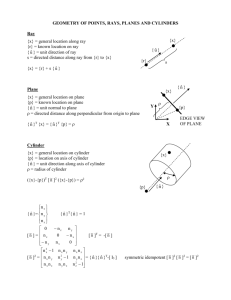
Spatial elements, relations, notation
2
ï
z,ü
parallel
Relations
non parallel
perpendicular
lying on, passing
through, coincident
pair of points:
determine a distance
point and line:
p
lying
y g on
not lying on → plane, distance
pair of lines:
D
coplanar
intersecting → angles
parallel → distance
C
non coplanar
skew → angle and distance
B
l
A
point and plane: lying on
not lying on → distance
k
AB
segment A,B
|AB| = l
line A,B
B=k1l
intersection
line and plane:
intersecting → angle
pair of planes:
α
parallel → distance
intersecting → angle
α = [BCD] plane B,C,D
A
parallel → distance
not lying
l
on
Descriptive Geometry 1
5
Introduction
Representation of point
2nd quadrant
P”
π2
1st quadrant
π2
d2
P”
P
x1,2
P
d1
d1
d2
P’
3rd quadrant
x1,2
P’
π1
4th quadrant
π1
In which quadrant or image plane is the point located, why is it special?
A”
B”
N2
C’
B’
B
X’ X”
X’=X”
N1”
N2”
A’
Descriptive Geometry 1
G”
D”
C”
F”
d1
d2
D’
d1 = d2
N1
6
H”=J”
E’=E”
H’
F’=G’ J’
K”
L”
L’
x1,2
K’
K
Multi-view representation
Auxiliary projections
Side view, third image
x2,3
d2
P”
Chain of transformations
P”
P’’’
x1,2
BV
C”=D”
A”=B”
QV
AV
CV
d2
P’
B’
Fourth image, linked to the first image
P”
x1,2
Q”
x1,2
DV
C’
d1
DIV
PIV
A’
A
x4,5
CIV
P’
Q’
d1
QIV
D’
BIV
P’
Descriptive Geometry 1
x1,4
x1,4
7
PV
PIV
AIV
Multi-view representation
Representation of Straight Lines, Relative Positions
first principal line
second principal line
Q”
h”
h
A’
A
Q’
Intersecting
a”
D”
x1,2
h’
P’Q’=PQ
P
Q =PQ
first proj. line
first coinciding
points L”
p1 ”
A”
A
x1,2
P’
C”
v”
A”B”=AB B”
P”
profile line
B’
B
parallel
M’
p1’=K’=L’
C’
skew
c”
K”
D’
v’
e”
p2 ’
N’
intersecting
g”
second proj. line
second coinciding
points
p2”=M”=N”
k”
l”
parallel
m” =n”
d”
b”
c’’
g’
a’
b’
Descriptive Geometry 1
d’
d
e’
k’=l’
first coinciding
g
lines
8
m’
n’
second coinciding
g
lines
Multi-view representation
Point and Line
π2
P”
R”
R
P’
P”
l
l’
R’
P”
N
π2
S”
Q”
Q
Q’
L”
π1
L
M’
N”
l”
P’
L’
P”
S’
p”
Q’
l’
x1,2
L”
N’
π1
l”
L’
N”
Q”
L”
L”
P’
p’
R’
R
l
Descriptive Geometry 1
N’
N*
M’
Q’
M
p
K”
p”
N’
l’
L
K’
S”
M”
Q”
Q”
Q
l
N’
R”
K
ll”
P
M
x1,2
N” p
N
K”
S
M”
ll”
P
N” p
l’
M*
P’
L’
p’
S’
S
9
K’
Q’
l
K
p
L’
Multi-view representation
Tracing Points of a Line
l”
N1
π2
N2
x1,2
l”
N2’
l
l
Q
N2
l’
N1
N2’
l’
x1,2
N1”
Problems:
1)
π1
2)
Descriptive Geometry 1
N1”
10
find the tracing points of principal
/profile lines
determine lines by means of
tracing points
Multi-view representation
Representation of Plane
Pair of intersecting lines
Pair of parallel lines
c”
a”
m” =n”
d”
k”
l”
b”
x1,2
c’
a’
m’’
k’=l’
n’
b’
A”
B”
Plane figures
C“
1”
B’
A’ spanned plane
d’
3”
T
Tracing
i
li
lines
n2
4”
n2
x1,2
12
2’
C’
Descriptive Geometry 1
2”
2
3’
n1
1’
4’
slanted plane
slanted plane
11
n1
spanned plane
Multi-view representation
Line and Plane
3”
2”
lying on (incident)
l
intersecting
l”
[[1234]]
1”
4”
2’
g
3”
2”
P”
1 [1234]=P
l”=g”
3’
1’
1”
l’
4”
4’
parallel
ll l
a
2 [ab]
2’
g’
a”
a
a”
3’
P’
b”
1’
1
a’
l’
a’
4’
b’
Descriptive Geometry 1
12
Multi-view representation
Intersection of Two Planes
3”
2”
3
2”
A”
A
3”
A”
2
P1”
P1= |12| 1 [ABC]
A
P2”
4”
4
1”
P2
P1
B”
C”
B’
P2= |AC| 1 [1234]
2’
B”
B
1”
C
4
B’
1
1’
1
A’
Descriptive Geometry 1
P2’
3’
2’
3’
P1’
C’
1’
C’
A’
4’
13
4’
4
Multi-view representation
Transversall off a Pair
T
P i Of Skew
Sk
Lines
Li
Passing
P
i
Through
Th
ha
Given Point
Sketch and algorithm
Solution in Monge’s
A
a
Your solution
a”
A”
P”
a”
”
t
B”
B
b
P”
b”
a”
P
b”
x1,2
B = [Pa] 1 b
a’
P’
P’
t = |PB|
a’
B’
or
b’
b
t = [Pa] 1 [Pb]
A’
a’
b’
a2a , [Pa]
[P ] = [aa]
[ ]
Descriptive Geometry 1
14
Multi-view representation
Transversal of a Pair Of Skew Lines Parallel to a Given
Direction
Sketch and algorithm
Solution in Monge’s
t” X”
A
a
b
a”
A”
A
a”
t
d
X
Your solution
B
d”
d* ”
d”
B”
b”
b”
d*
x1,2
X
d*
d’
a
X, d*2d
B = b 1 [ad*]
t
B
B,
t 2d*
Descriptive Geometry 1
b’
a’
d* ’
B’
t’
A’
d’
X’
b’
a’
15
Multi-view representation
Auxiliary Projections on Special Purposes 1
Distance of a pair of skew lines
True length of a segment
D”
A”
A”
B”
C”
B”
CV
x1,2
x1,2
B’
d
D’
C’
C
B’
AV=BV
DV
BIV
A’
BIV
A’
x4,5
x1,4
14
x1,4
AIV
CIV
AIV
Descriptive Geometry 1
16
DIV
Multi-view representation
Auxiliary Projections on Special Purposes 2
Edge view of a plane: transformation of a
plane in projecting plane
π4 ü
h,
Application: find the distance d of the point P
and the plane [ABC].
π4 ü π1
B”
”
C”
AIV
h”
h”
A”
π4
π2
x1,2
BIV
h
A”
x3,4
x1,2
P”
h’
π1
A
CIV
PIV
C’
h’
x1,4
A’
P’
A’
Descriptive Geometry 1
d
B’
17
Multi-view representation
Auxiliary Projections on Special Purposes 3
Construction of the true shape of a figure lying in a general plane
General plane
6
fourth projecting plane
6
fifth principal plane
B”
A”
h”
π4
π2
AIV
h”
C”
x4,5
x1,2
A”
X1,4
AV
x1,2
BIV
h
A
h’
π5
π1
h’
C’
A’
BV
AIV
B’
X4,5
CIV
CV
x1,4
A’
Descriptive Geometry 1
18
Multi-view representation
AV
Cast Shadow, Self-shadow, Projected Shadow
Descriptive Geometry 1
19
Shadow constructions
Shadow in Traditional Descriptive Geometry
Riess, C.: Grundzüge der darstellenden
Geometrie
(Stuttgart : Verl. J. B. Metzleráschen
Buchhandlung, 1871)
Application of Descriptive Geometry for
Construction of Projected Shadow (plate X.)
Romsauer Lajos: Ábrázoló geometria
(Budapest : Franklin-Társulat, 1929)
htt //
http://www.c3.hu/perspektiva/adatbazis/
3h /
kti / d tb i /
Descriptive Geometry 1
20
Shadow constructions
Shadow in Visualisation
Descriptive Geometry 1
21
Shadow constructions
Shadows - Basics
A
B”
f”
f
A’
A
B
A*
A
ff’
B**
A
N2
f
A*
z
B
f
f’
B**
A’
B*
x
A
f
f’
y
A*
N1
Descriptive Geometry 1
22
Shadow constructions
Shadow Properties
1)
Our constructions are restricted to parallel lighting.
2)
We do not represent transition between dark and light shade.
3)
We usually construct three types of shadow: cast shadow on the ground or on the image
planes, self-shadow (shade) and projected shadow.
4)
Shadow of a point: piercing point of the ray of light passing through the point, in the surface
(on ground plane, picture plane etc.)
5)
Shadow of a straight line: intersection of the plane passing through the line, parallel to the
direction of lighting and the surface (screen).
6)
Shadow of a curve: the intersection of cylinder (whose generatrix is the curve, the generators
are rays of light) with the surface (screen).
(screen)
7)
Shadow-coinciding points: pair of distinct points, whose shadows coincide.
8)
Alongside cast shadow the surface is in self-shadow.
9)
In case of equal orientation of a triangle and its shadow, the face of triangle is illuminated.
10)
The cast shadow outline is the shadow of the self-shadow outline.
Descriptive Geometry 1
23
Shadow constructions
Cast Shadow, Projected Shadow
3
3**
2
A
A
shadow coinciding
points
A
C
C*
4
1
Descriptive Geometry 1
4*
1*
24
Shadow constructions
Intersection of Pyramid and Line
Find the intersection of line and pyramid
auxiliary intersection
parallel and similar to
the base
h
auxiliary intersection
passing through the
apex
l
n1
Descriptive Geometry 1
25
Intersection problems
Intersection of Polyhedron and Projecting Plane
Find
d the
h intersection off plane
l
and
d polyhedron
l h d
1”
D” B”
A”
C”
3”
M”
4’
D’
C’
1’
3’
M’
A’
2’
Descriptive Geometry 1
B’
26
Intersection problems
Intersection of Polyhedron and Plane (auxiliary projection)
B
Π2
5
1
4
1”
A
3
2
C”
h
C
M
1’
Π1
D
C’
Hint: introduce Π4 image plane perpendicular to Π1 and the plane of parallelogram (Π4
Descriptive Geometry 1
27
h6 x1,4
Intersection problems
h’).
Intersection of Pyramid and Plane (Collineation)
C
n2
P’
M”
a
P
A”
A
B”
B
D”
D
C”
C
D’
The relation between the base polygon and the polygon
of intersection is central-axial collineation.
The axis of collineation is the line of intersection of the
base plane and the plane of intersection, the center is
the
h apex off the
h pyramid.
id
A pair of corresponding points is the pedal point of a
lateral edge and the piercing point of the edge in the
plane of intersection.
The center is the vertex of the pyramid.
Descriptive Geometry 1
28
M’
C’
A’
B’
n1
Hint: start with
|MA| W [n1n2]
Intersection problems
Intersection of Prism and Line
Find the intersection of line and prism
auxiliary intersection
parallel and congruent to
the base
h
auxiliary intersection
parallel to the generators
l
n1
Descriptive Geometry 1
29
Intersection problems
Intersection of Prism and Plane (affinity)
A”
n2
P’
P
A” F”
B” E” C” D”
E’
P
F’
a
The relation between the base polygon and the
polygon of intersection is axial affinity.
A’
A’
The axis of affinity is the line of intersection of the
base plane and the plane of intersection.
A pair of corresponding points is the pedal point
of a lateral edge and the piercing point of the edge
i th
in
the plane
l
off intersection.
i t
ti
Descriptive Geometry 1
D’
30
C’
B’’
n1
Hint: start with
|F F| W [n1n2]
Intersection problems
Intersection of a Pair of Solids
M”
3”
VII
The intersection of two polyhedrons is a
polygon (usually 3D polygon).
VII
VIII
V
III
V
III
2”
IV
IV
VI
II
1”
1
The vertices of the polygon of
intersection are the piercing points of the
edges
d
off a polyhedron
l h d
in
i the
h faces
f
off the
h
other polyhedron.
VIII
I
I
IX
X
A” B”
E” C”
D”
II
X1,2
VI
IX
X
E
IX
I VII
3’
B’
VI
M’ V
1’
1
II
D’
IX
V
I
VIII
III
IV
C’
VIII
VII
III
II
IV
2’
Descriptive Geometry 1
1
2
X
X
A’
31
The edges of the polygon of intersection
are segments of intersection of pairs of
faces
faces.
M
2
III
VII
VIII
3
V
VI
I
IX
II
X
IV VI
A B C D E A
Sequence: I-VII-III-VIII-V-X-VI-IV-II-IX-I
At the visibility, one can think of solids or
surfaces.
The visibility depends on, what we want
to represent as a result of set operation:
union, intersection or a kind of
difference.
Intersection problems
Intersection of a Pair of Solids (your solution)
Algorithm:
Introduce auxiliary image plane
perpendicular to the horizontal edges of
the prism
Construct the fourth image
Find the piercing points of the edges of
pyramid in the faces of the prism
Find the piercing points of the edges of
prism in the faces of the pyramid
Find the right sequence of the vertices
of polygon of intersection
Draw the polygon of intersection in both
images
Show the visibility
Descriptive Geometry 1
32
Intersection problems
Basic Metrical Constructions 1
The true length of a segment is the hypotenuse
of right triangle. One of the legs is the length of
an image of the segment, the other leg is the
difference of distances from the image plane.
A”
d1
A”
d1
B”
π2
x1,2
A
B’ d1
l
d1
l
Q
B”
A’
B
x1,2
B’
A’
A
Descriptive Geometry 1
π1
33
AB
Reverse problem: the images of a line, a
point of the line and a distance is given
given. Find
the images of points of the line whose true
distance from the given point is equal to the
given distance. (Hint: by using an auxiliary
point of the line find the ratio of the true
l
length
th and
d th
the llength
th off image.)
i
)
Metrical problems
Basic Metrical Constructions 2
Any plan geometrical construction can be carried out by
rotating the plane parallel to an image plane. The relation
between the image of a plane and the image of the
rotated plane is orthogonal axial affinity. The axis is a
principal line of the plane
plane. One rotated point can be found
by the true distance of the point and the axis.
π2
P”
h”
h
x1,2
h’
P’
P
(P)
h
(P)
x1,2
P’
(P)
Descriptive Geometry 1
h’
π1
34
Reverse problem: construct the images
of a figure, whose rotated image is
given. Hint: use inverse affinity and
lying on condition.
Metrical problems
Basic Metrical Constructions 3
The first image of a normal of plane, n’ is
perpendicular to the first image of the first principal
line h’ of the plane.
n”
v”
h”
The second image of a normal of plane, n” is
perpendicular
di l to
t the
th second
d image
i
off the
th second
d
principal line v” of the plane.
x1,2
π2
n
v
v’
P
n’
h
x1,2
P’
n’
Descriptive Geometry 1
v’
h’
π1
35
h’
Reverse problem: construct a plane
perpendicular to a given line.
Hint: the plane can be determined by
means of principal lines.
Metrical problems
Modeling of 3D Polyhedrons
Construct a cube. One of
the faces is given by its
center and line of an edge.
O
e
e”
O”
Algorithm
1)
Construct the square lying in plane [O,e],
with the centre O and an edge on e. (Rotation
- counter-rotation of plane, affinity, inverse
affinity, (2).)
2)
Construct lines perpendicular to the plane
[O,e], passing through the vertices of the
square. (Perpendicularity of line and plane,
(3).)
3)
Measure the length of an edge onto the
perpendiculars, chose the proper direction
from the two possibilities. (True length of a
segment, (1).)
4)
C
Complete
l t th
the figure
fi
by
b showing
h i
the
th visibility.
i ibilit
Descriptive Geometry 1
36
x1,2
O’
e’
Metrical problems
Step-by-step Construction
Construction of the square
Normal of the plane
n”
P”
Measure of distance
v”
B”
B
e”
A”
X”
d1
O”
d1
h”
h”
x1,2
Visibility
e”
Ax”
O”
A”
x1,2
x1,2
x1,2
(P)
(B)
h’
(e)
O’
(A)
e’
B’
P’
d1
A’
Descriptive Geometry 1
n’
h’
X’
d1
v’
v
Ax’
O’
true length
of edge
e’
A’
37
Metrical problems
Axonometry
z
One of the methods of Descriptive
Geometry, used to produce pictorial
sketches for visualization.
Q
Let three axes x,
x y,
y z through the origin
O be given in the image plane. Measure
the coordinates from O onto the three
axes such that each coordinate will be
multiplied by the ratios of foreshortenings
qx, qy, qz respectively. The point
determined by the coordinates is
considered as the axonometric image of
the point P(x, y, z).
The axonometric system can be
determined by the points
{O, Ux, Uy, Uz}, the image of the origin
and the units on the axes x, y and z.
P
z
Ux
1
y
x
P’
1
O
Uz
1
Uy
R
x
According to the Fundamental Theorem
of Axonometry the axonometric
image of an object is a parallel
projection or similar to the parallel
In a
axonometry
o o
y the left-handed
a d d Cartesian
a
a system
y
is used.
u d
projection of the object.
Descriptive Geometry 1
38
Axonometry
Fundamental Theorem of Axonometry (Pohlke)
Ez
Let the sytem {O, Ex, Ey, Ez} be
given in the image plane. The figure
{O,, Ex, Ey, Ez} can be considered
{
as the parallel projection of a
spatial triplet {O, Ex, Ey, Ez} of
three unit segments perpendicular
by pairs. The spatial triplet can be
one of two types of orientation
apart from translation in the
direction of projection.
Ex
O
Ey
Ez
Ex
O
Ey
http://mathworld.wolfram.com/PohlkesTheorem.html
http://www.math-inf.uni-greifswald.de/mathematik+kunst/kuenstler_pohlke.html
Descriptive Geometry 1
39
Axonometry
Orthogonal Axonomtry
z
z
Z
Z
O
O’
Y
y
O
X
Y
X
x
x
y
O’ is the orthogonal projection of the origin,
X, Y and Z are the piercing points of the axes in the image plane.
O’ is the orthocenter of the triangle (tracing triangle) XYZ.
In the axonometric sketch the prime ( ’ ) is omitted.
Descriptive Geometry 1
40
Axonometry
Orthogonal Axonometry → Multi-view
The orthogonal axonometric image can be considered as one
of an ordered pair of images in multi-view representation.
x a,IV
z
z
Z
Z
IV
IV
P
P
O
O
Descriptive Geometry 1
IV
X
XIV =YIV
Y
y
IV
P’
x
41
x IV=y IV
Axonometry
Oblique (klinogonal) Axonometry
Ez
Ex
O
Ey
Ez
Ex
O’
Ey
OO’ is not perpendicular to the picture plane.
Descriptive Geometry 1
42
{qx, qy, qz}
Axonometry
Izometry, Technical Axonometry
Technical axonometry
Izometry
z
z
8
120° 120°
8
1
x
120°
7
x
y
qx = qy = qz =1
Descriptive Geometry 1
y
43
qx = qz =1, qy = ½
Axonometry
Cavalier, Bird’s-eye View, Worm’s-eye View
Bird’s eye view (top view)
Military axonometry
Frontal Axonometry
Worm’s eye view (bottom view)
z
z
z
x
y
x
y
y
x
Image plane: [xz]
Image plane: [xy] qx = qy = 1
if qy = 1 : cavalier axonometry
if qz = 1: military axonometry
Descriptive Geometry 1
44
Image plane: [xy]
qx = qy = 1
Axonometry
Frontal Axonometry, Shadow
A
(A)
Descriptive Geometry 1
45
Axonometry
Military Axonometry
www.xanadu.cz
d
Descriptive Geometry 1
http://www.fotosearch.com/NGF001/57478808/
46
Axonometry
Cast Shadow in Orthogonal Axonometry
A*
f
K*
A
Dodecahedron,
top view and heights
f
K
x12
(A)
(O)
Descriptive Geometry 1
f’
K’
47
Axonometry
Projected Shadow
I*
A*
X*
J*
J
K*
I
H*
C*
A
J
B*
C
K
H
X
Y*
D*
D
C
Y
B
D
Descriptive Geometry 1
48
Axonometry
Representation of Circle (Multi-view)
”
3”
” 6” v”
10”
1.
The major axes lie on first and second principal lines
h’ and v” respectively.
2.
The length of major axes 1’2’ and 5”6” is equal to
the diameter of circle (true length).
3.
The length of a minor axis is constructible from the
major axis and a point, as plane geometric
construction.
(See construction of 8”)
8”
h”
1”
O”
2”
7”
9”
5”
5
x1,2
4”
6”
7’
a
2’
5’
6’
6
5”
4
4.
The left
Th
l f and
d right
i h extreme points
i
9 and
d 10 can be
b
found as points of ellipse with vertical tangents, by
means of orthogonal axial affinity.
5.
The tangents at the points mentioned above are
parallel to the proper diameters.
diameters
3’
1’
h’
8’
8
Descriptive Geometry 1
a
b
10’
v’
9’
b
1”
4’
O’
O
8”
49
Representation of circle
Representation of Circle (Orthogonal Axonometry)
z
1.
The major axes of ellipses are perpendicular to
the coordinate axes.
2.
The minor axes are coinciding lines with the
coordinate axes.
axes
3.
The fundamental method of constructions is the
orthogonal axial affinity.
z
Oo
zo
O
x
(y)
O
y
y
(x)
x
(O)
Descriptive Geometry 1
50
Representation of circle
Representation of Circle (Oblique Axonometry)
z
1.
The fundamental method of
constructions is the oblique axial
affinity.
2
2.
The axes
e can
n be constructed
on t
ted by
b Rytz’
R t ’
method. The ellipse is determined by
a pair of conjugated diameters; find
the major and minor axes.
L
Yo
yo
x
Q*
Q
-90°
y
M
P
Y
O
N
(Y)
(y)
Descriptive Geometry 1
51
Representation of circle
Axonometry vs. Perspective
Descriptive Geometry 1
52
Perspective
Vanishing Point, Vanishing Line
Vt
vanishing line
vanishing line
Vt∞
Vl
vanishing line
horizon
Vr
Vl
vanishing line
horizon
Vr
A set of parallel lines in the scene is projected onto a set of lines in the image that meet in a common
point. This point of intersection is called the vanishing point. A vanishing point can be a finite (real)
point or an infinite (ideal)
p
(
)p
point on the image
g p
plane. Vanishing
gp
points which lie on the same p
plane in the
scene define a line in the image, the so-called the vanishing line.
Descriptive Geometry 1
53
Perspective
Basics of Perspective with Vertical Image Plane
plane of horizon
Principal point
F
P
image plane
l
A=(A)
Ca
h
C
F
i
image
plane
l
rotated ground plane
V
C
plane of horizon
h
(C)
rotated center
l
ground
d plane
l
P
a
a
ground plane
F
V
h
(P)
P
a
A=(A)
(C)
(
)
Descriptive Geometry 1
54
Perspective
Perspective Collineation, Perspective Mapping
V1
Q’
Q
R
A perspective
ti
collineation
lli
ti
iis d
determined
t
i d
by the center C, axis a and the
l’
vanishing line v.
P’
R’
V2
v
V3
To the square P
P’, Q
Q’, R
R’, S
S’=S
=S, we can
l
find the quadrilateral PQRS at the
P
a
S’=S
mapping Π’
Y Π.
When the ground plane is rotated into
V1
C
V3
(Q)
(R)
R
h
V2
(l)
(P)
the picture plane, the two systems of
points and lines are related by centralaxial collineation. This perspective
collineation is determined by the
l
Q
rotated center (C), axis a and the
P
a
S’=S
horizon h (vanishing line).
To the square (P), (Q), (R), (S)=S, we
can find the quadrilateral PQRS at the
(C)
Descriptive Geometry 1
mapping (Π)
55
Y Π.
Perspective
Heights in Perspective
vanishiing line
True height can be measured in
the image plane
h
vanishing line
true height
Descriptive Geometry 1
56
a
Perspective
Representation of Circle (Perspective)
In the ground plane
In vertical plane
(B)
(P)
V
F
h
(O)
b
B
(K)
O
d
P
K
a
(M) (b)
M
Q=(Q)
A=(A)
[P]
[M]
dist((Q),(P)) = dist((A),(B))
M: midpoint of PQ
K: midpoint of AB
AB, center of the ellipse
(C)
d
O: image of center of circle
d = dist( (v), a) = dist( (C), h)
( ) vanishing
(v)
i hi
line
li
off ground
d plane
l
Descriptive Geometry 1
57
Perspective
Cylinder and Cone in Perspective
Axonometric sketch
h
C
C
h
a
r
a
Ca
r
Descriptive Geometry 1
58
Perspective
Shadow in Perspective
If’ shadow vanishing point
horizon
If light vanishing point
http://www.math.ubc.ca/~cass/courses/m309-03a/m309-projects/endersby/Antisolarpoint.html
Descriptive Geometry 1
59
Perspective
Shadow Types in Perspective
f
If
h
f’
h
If’
h
If’
If
Descriptive Geometry 1
60
Perspective
Perspective with Slanting Picture Plane
H
H
C
F
h
[C]
F
Vz
Vz
Descriptive Geometry 1
61
Perspective
Constructions with Slanting Picture Plane
Rotation of a vertical line
Rotation of the ground plane
H
(l)
V
(P)
P
l
H
F
h
F
[C]
[C]
a
a
N
h
(p)
(C)
p
Vz
Descriptive Geometry 1
62
Perspective
Perspective with Slanting Picture Plane
Descriptive Geometry 1
63
Perspective