Assignment #2 Solutions
advertisement

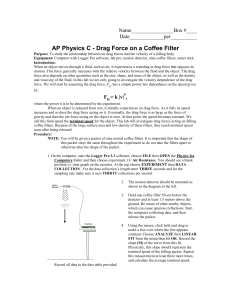
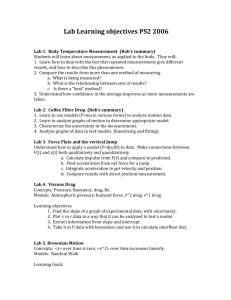
PC235 Winter 2013 Classical Mechanics Assignment #2 Solutions #1 (10 points) JRT Prob. 1.40 A cannon shoots a ball at an angle θ about the horizontal ground. (a) Neglecting air resistance, use Newton’s second law to find the ball’s position as a function of time. (b) Let r(t) denote the ball’s distance from the cannon. What is the largest possible value of θ if r(t) is to increase throughout the ball’s flight? Solution (a) This is just a repeat of PC131: x(t) = (v0 cos θ)t, y(t) = (v0 sin θ)t − gt2 /2, z = 0. (b) Since r2 = x2 + y 2 + z 2 , we have 1 r2 = g 2 t4 − (v0 g sin θ)t3 + v02 t2 . 4 (1) If we require that r always increases, we must have a dr/dt that is always positive. It’s easier to work with the equivalent goal that d(r2 )/dt must always be positive. We have d(r2 ) = g 2 t3 − 3(v0 g sin θ)t2 + 2v02 t. dt This derivative vanishes if and only if there is a real-valued solution for p v0 2 t= 3 sin θ ± 9 sin θ − 8 . 2g (2) (3) If θ is small, the argument of the square root is negative, and thus r always increases. As θ increases,pthe first value of θ for which the derivative does vanish is given by sin θ = 8/9. That is, θmax = 70.5◦ . 1 #2 (10 points) A mass hangs from a massless string of length ℓ. The mass swings in a circle in the horizontal plane, with the string making a constant angle β with the vertical (see Fig 1.) What is the angular frequency ω of this motion? Solution The mass travels in a circle with constant angular velocity. In 2D polar coordinates, from eq. (1.29) of the class notes, we have a purely radial acceleration a = −rω 2 r̂, where r = ℓ sin β. The forces on the mass are the tension T in the string, and gravity mg; see Fig. 2. Since there is no acceleration in the vertical direction (the mass swings in a horizontal plane,) we can write down vertical and radial equations for Newton’s second law: T cos β − mg = 0 T sin β = m(ℓ sin β)ω 2 . We can eliminate T from these equations and solve for ω, r g . ω= ℓ cos β Note that if β ≈ 90◦ , then ω → ∞. This makes sense, as the radial force and corresponding tension in the string would have to be enormous in order to pcompletely counteract the effect of gravity. Also, note that if β ≈ 0, then ω ≈ g/ℓ, which represents the frequency of a plane pendulum of length ℓ. Fig. 1: Configuration for problem #2 #3 (10 points) JRT Prob. 2.8 A mass m has velocity v0 at time t = 0 and coasts along the x axis in a medium where the drag force is F (v) = −cv −3/2 . Use the method of Problem 2.7 to find v in terms of the time t and the other given parameters. At what time (if any) will it come to rest? 2 Fig. 2: Problem #2 - Forces acting on the mass Solution Using the method of Problem 2.7, we find that Z v dv ′ 2m ′−1/2 v 2m 1 1 √ −√ t=m = v = . v0 ′3/2 c c v0 v v0 −cv Rearranging, we get v= 1+ v0 √ 2 . ct v0 2m (4) (5) The mass comes to a rest when v = 0, which only happens when t → ∞. #4 (10 points) An object of mass m is projected vertically upwards with speed v0 in a medium that exerts a drag force f = −mKv, where K is a positive constant. Find the maximum height achieved by the object, the time taken to reach that height, and the terminal speed. Solution We will need to find v(t) and y(t). We start by writing the equation of motion in the vertical direction (with y increasing in the upward direction), mv̇ = −mg − mKv, (6) with the initial condition that v = v0 at t = 0. Note the signs in the previous equation - if velocity is positive (upward motion), drag and gravity must both be negative. We can immediately cancel out m and separate variables, producing Z t Z v dv ′ dt′ , (7) =− ′ 0 v0 g + Kv 3 which evaluates to 1 ln t= K g + Kv0 g + Kv . (8) We can already find the time required to reach the maximum height. Here, v = 0, so the time is Kv0 1 ln 1 + tmax = . (9) K g To find the terminal speed, we need to invert Eq. (8) to find v(t), and then find |v| as t → ∞ (the object will hit its terminal speed on the way down). Inverting Eq. (8) gives g v(t) = v0 e−Kt − 1 − e−Kt . (10) K In the limit that t → ∞, the exponential terms tend to zero, and we get vter = −g/K. Of course, this is a rather formal way of doing things. We could also go back to the original equation of motion and simply set the right-hand side to zero (implying that v̇ = 0). This gives the same answer. As for the maximum height, we could integrate v(t) to find y(t) and then evaluate it at t = tmax . Most of you will (hopefully) work out ymax this way; I’ll show you an alternate method. First, note that dv dv dy dv = =v . dt dy dt dy (11) Then, the equation of motion becomes v dv = −g − Kv. dy Now, we solve by separation of variables: Z v Z y Z g v ′ dv ′ 1 v ′ 1− dv ′ , dy = = − ′ K v0 g + Kv ′ v0 g + Kv 0 which provides a relationship between height and velocity of 1 g g + Kv0 y(v) = (v0 − v) − 2 ln . K K g + Kv Now, since ymax is reached when v = 0, we simply evaluate y(0), which gives g Kv0 v0 − ln 1 + ymax = . K K2 g (12) (13) (14) (15) This procedure is admittedly a bit strange, but for some functional forms of the drag force, it isn’t possible to analytically perform integration of v(t) to find y(t). 4 The terminal speed is found by simply setting the right-hand side of Eq. (6) to zero (implying no acceleration). The result is negative, but this simply means that the object must be moving in the negative y direction for “terminal velocity” to be meaningful (this is why Taylor prefers to calculate terminal speeds with “upsidedown” coordinate systems). The terminal speed is the absolute value of this, vter = g . K (16) #5 (10 points) A sphere of radius Rs and density ρ starts at rest and falls vertically through a medium of constant density ρm that exerts a quadratic drag force of magnitude f = 0.2πρm Rs2 v 2 on it. Prove that the time taken for the sphere to fall through a height H is 1 −1 u t = √ cosh e t0 , (17) 2u where 3ρm H u= , (18) 20ρRs p and t0 = 2H/g is the time taken in the absence of drag. Note: This question isn’t nearly as difficult as it looks. Most of the work is already done in the notes. Solution (You can start from from Eq. (3.38) of the course notes). The equation of motion is mv̇ = mg − cv 2 , (19) where, from the problem description, c = 0.2πρm Rs2 , and where the positive x-axis points downward. Integration by separation of variables gives gt v(t) = vter tanh (20) vter p where vter = mg/c. Integrating once more gives 2 gt vter . (21) ln cosh y(t) = g vter Now for the new part. Expanding vter in terms of m, c, and g, setting y = H, and solving for t gives r m t= (22) cosh−1 ecH/m . cg 5 Then, using m = (4/3)πR3 ρ (since it’s the mass of a sphere of radius R and density ρ), and using the above expression for c, we have s 3(0.2)πρm R3 H 4πR3 ρ −1 exp cosh . (23) t = 3g(0.2)πρm R2 4πR3 ρ s 20Rρ 3ρm H −1 = (24) exp cosh 3ρm g 20R s s 3ρm H 2H 10Rρ −1 exp cosh (25) = g 3ρm H 20R 1 −1 u √ cosh e t0 , = (26) 2u using the aforementioned expressions for H and t0 . #6 (15 points) Repeat Example 2.6 (not problem 2.6!) from the text, where the starting velocity is 40 m/s and the initial angle is 55◦ above the horizontal. On the same plot, graph the trajectory of the ball with drag and neglecting drag (as in Fig. 2.10 of the text). What is the range of the ball without drag? What is the range with drag? Solution I’ve solved this problem in Matlab, but you can use Excel as well. The trajectories are shown below. In the presence of quadratic or combined linear and quadratic drag, the range is about R =78.0 m. In the absence of drag, the range is (see eq. (2.38) of the text) Rvac = 2vx0 vy0 2v0 sin θ0 v0 cos θ0 v 2 sin 2θ0 = = 0 = 153.4 m, g g g (27) which matches quite well with the value found on the plot. Note that I used 0.01 second time steps here. If you used 0.5 second time steps, your values will differ a bit. 6 60 40 y [m] 20 0 −20 −40 −60 −80 0 20 40 60 80 100 x [m] 120 140 160 180 Fig. 3: Plots for problem #6. The blue curve shows the trajectory in the presence of drag (red dots show the location at 1 second intervals). The red curve shows the trajectory in vacuum (blue dots show the location at 1 second intervals). #7 (5 BONUS points) Using your result for question #4, find an approximate expression for the maximum height when K is small. The expression should include terms up to first order in K. In other words, you need to derive an equation of the form drag vac ymax ≈ ymax (1 + γK), (28) vac where ymax is the maximum height in the absence of drag, and determine the value of γ. A Taylor series will be required. Solution When K is small, the ln function in Eq. (15) can be expressed as a Taylor series. Since this series will be multiplied by g/K 2 , and since we require a solution up to first order in K, we need to retain terms up to O(K 3 ) in the Taylor series. This gives # " 2 3 v0 1 Kv0 g Kv0 1 Kv0 ymax = + − ··· (29) − 2 − K K g 2 g 3 g v2 Kv03 v0 v0 − + 0 − + ··· K K 2g 3g 2 v02 2 Kv0 = 1− + ··· . 2g 3 g = 7 200 Here, the leading term v02 /2g is the value of ymax that would be obtained in the absence of any drag force. The first correction term has a negative sign, indicating that ymax is reduced by the presence of drag, as expected. Therefore, our term γ has a value of −2v0 /3g. #8 (5 BONUS points) Use Excel or Matlab (or any other software) to model the problem in question #4, where the initial upward speed is v0 = 25 m/s, K = 0.1 s−1 and m = 1 kg. You should hand in a plot of y(t) from t = 0 until the time at which the object returns to its original position. It might be a good idea to use this code to check your results for questions #4 and #7. Solution My Matlab code proceeds as follows: % Declare parameters K=.1; v0=25; g=9.8; % Initialize time vector t=0:0.001:6; % Initialize position and velocity vectors % Set known initial velocity y=zeros(1,length(t)); v=zeros(1,length(t)); v(1)=v0; % Step through time, calculating y and v at each time for q=2:length(t), y(q)=y(q-1)+v(q-1)*(t(q)-t(q-1)); v(q)=v(q-1)+(-g-K*v(q-1))*(t(q)-t(q-1)); end The results are shown below. Zooming in on the y(t) plot shows that ymax = 27.33 m. Plugging the appropriate parameters into our answer for question #4 gives the same result. Question #7 gives us ymax = 26.46 m, which is quite close as well - remember, this last value is a first-order approximation in K. Incidentally, if you extend the time axis to 40 or 50 sections, you will find that the velocity 8 asymptotically approaches -98 m/s. This is what we calculated for the terminal velocity at the end of question #4. 40 height [m] 20 0 −20 −40 0 1 2 3 time [s] 4 5 6 1 2 3 time [s] 4 5 6 velocity [m/s] 40 20 0 −20 −40 0 Fig. 4: Plots for problem #7. Top: vertical position as a function of time. Bottom: vertical velocity as a function of time. #9 (5 BONUS points) JRT Prob. 1.45 Prove that if v(t) is any vector that depends on time (for example the velocity of a moving particle) but which has constant magnitude, then v̇(t) is orthogonal to v(t). Prove the converse, that if v̇(t) is orthogonal to v(t), then |v(t)| is constant. Solution p Since the magnitude of v(t) is equal to v(t) · v(t), the magnitude is constant only if v(t) · v(t) is constant. But, d [v(t) · v(t)] = 2v(t) · v̇(t). (30) dt Thus, the magnitude of v(t) is constant if and only if v(t) · v̇(t) = 0; that is, if v(t) is orthogonal to v̇(t). 9