Rotational Motion: Rolling Objects & Angular Momentum
advertisement

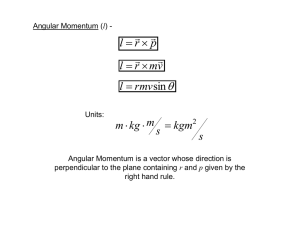
Rotational Motion (cont.) Linear acceleration of rolling objects R Consider a round object (this could be a cylinder, hoop, sphere or spherical shell) having mass M, radius R and rotational inertia I about its center of mass, rolling without slipping down an inclined plane. aCM θ What is the linear acceleration of the object’s center of mass, aCM , down the incline? We analyze this as follows: The force of gravity, Mg, acting straight down is resolved into components parallel and perpendicular to the incline. Since the object rolls without slipping there is a force of friction, f, acting on the object, at it’s point of contact with the incline, in the direction up the incline. f Mg cos θ R θ a CM Mg Mg sin θ θ Newton’s 2nd law gives then for acceleration down the incline, ∑ F = Ma CM Mg sin θ − f = Ma CM The force of friction also causes a torque around the center of mass having lever arm R so we can also write, τ = Rf = Iα Solving for the friction, a CM f Mg cos θ I f= α R θ Mg This is used in the expression derived from the 2nd law: Mg sin θ Mg sin θ − f = Ma CM I Mg sin θ − α = Ma CM R θ The objects angular acceleration is related to the linear acceleration of the edge that contacts the incline by, a= Rα Since the object rolls without slipping this has the same magnitude as aCM so we have that, a CM α= R Using this in, a CM f Mg cos θ θ Mg Mg sin θ θ I Mg sin θ − α = Ma CM R I a CM Mg sin θ − = Ma CM R R I → − Ma CM − 2 a CM = − Mg sin θ R Multiplying through by –1, I Ma CM + 2 a CM =Mg sin θ R I Ma CM 1 + = Mg sin θ 2 MR I + = a CM 1 g sin θ 2 MR So that ,finally, a CM g sin θ = I 1+ MR 2 a CM f Mg cos θ θ Mg Mg sin θ θ a CM g sin θ = I 1+ MR 2 If the object is a solid cylinder , 1 I = MR 2 2 a CM f Mg cos θ θ Mg Mg sin θ g sin θ g sin θ g sin θ 2 a CM g sin θ = = = = 2 1 MR 1 3 3 + 1 2 1+ 2 2 MR 2 θ (solid cylinder) If instead the object is cylindrical shell, with all its mass at the rim I = MR 2 and, g sin θ g sin θ 1 = a CM = = g sin θ (cylindrical shell) 2 MR 1+1 2 1+ MR 2 Angular Momentum The rotational analog to linear momentum (p = mv) is angular momentum, L = Iω Recall that linear momentum is important because given a system of objects, in the absence of external forces, no matter how the objects of the system interact with each other, their total linear momentum is conserved. I.e. with, n P = ∑ pi For any two times, i =1 Pf = Pi Thus if there are two objects with linear momenta p1 and p2 so that their total momentum is at one time, P =i p1i + p2i Then no matter how they interact, collide, attract or repel each other, in the absence of external forces, this total momentum will not change so we have that, p1f + p2f = p1i + p2i Similarly, for rotational motion, in the absence of external torques (i.e.∑ τ =0 ), the angular momentum is conserved meaning that for any two times, Lf = Li Example Top view m A boy (mass m) runs with speed v and jumps onto the edge of an initially stationary merry-go-round (also called a carousel). v R M What is the angular velocity of the carousel (and the boy) after he has jumped on? Conservation of angular momentum requires, Lf = Li final R ω M We must first consider the boy’s m angular momentum about the rotation axis of the carousel when he is running in a straight line. His angular momentum is, Top view v r B= I BωB M Where IB is his rotational inertia about the axis and ωB is his angular velocity about the axis. We treat the boy as a point object of mass m, making his rotational inertia about the carousel axis I B = mr 2 Where r is his (changing) distance to the carousel axis. What is the boy’s angular velocity ωB about the axis? Top view m v r When we previously considered motion on a circular trajectory we had that vt = rω where the subscript t reminds us that this was velocity tangent to the circle. M Tangent to the circle means the component of the velocity that is perpendicular to a line drawn to the center of the circle (all of v, when the trajectory is circular). For this more general case we must decompose the velocity vector into components parallel and perpendicular to the line to the rotation axis. Then, v sin θ = rωB or, v sin θ ω= B r v sin θ m v cos θ θ θ v r Using this and I B = mr 2 in, 2 v = B (mr ) sin θ r gives, = B mrv= sin θ mv(r sin θ) M v sin θ m v cos θ θ θ v R r But notice that along his linear trajectory r sin θ is also the point of closest approach to the axis which here is R so that, = B mv(r= sin θ) mvR v sin θ Since all of these m, v and R are constant what we have just m shown is that despite the fact that r and θ are both changing as the boy approaches the carousel his angular momentum about the axis remains constant and is given by v sin θ B = mvR m Where R is the point of closest approach to the axis. v cos θ θ θ v r M v cos θ θ θ v R r (this must be true for angular momentum to be conserved. I.e. B calculated at any two times along this trajectory had better be the same). Having shown this once, we don’t need to re-derive it every time it comes up. m What needs to be remembered is that an object travelling linearly, with constant v, on a trajectory to pass an arbitrary point has a constant angular momentum about that point given by, m B = mvR Where R is the point of closest approach of the trajectory to the point. v r M v R r The initial angular momentum of m the system is the sum of the initial angular momenta of the boy Bi = mvR and the carousel Ci = 0 (since ωCi = 0), Top view v R L i = Bi + Ci = mvR M After the boy jumps on we have L f = I f ωf Where If is the combined rotational inertia of the boy and the carousel. The carousel can be treated as a uniform disk with 1 I C = MR 2 2 final R ω M For rotation about the same axis rotational inertia are simply additive so, Top view m v R 1 M I f = MR 2 + mR 2 = + m R 2 2 2 M Then, M 2 = ω = + Lf If f m R ωf = L i = mvR 2 final Solving for ωf , mv ωf = M + m R 2 R ω M Check behavior if M → 0 . New example initial Suppose the boy is on the rim of carousel at radius R from the center and the two have angular velocity ωi. The boy then pulls himself along the hand rail until he is a distance R/3 from the center. R ωi M final What is ωf after this move? Lf = Li Bf + Cf = Bi + Ci 2 1 1 R m ωf + MR 2 ωf = mR 2 ωi + MR 2 ωi 2 2 3 R/3 ωf M initial 2 1 1 1 m R 2 ωf + MR 2 ωf = mR 2 ωi + MR 2 ωi 2 2 3 M 2 m M 2 + ω = + R m R ωi f 2 9 2 R ωi M M m M + ωf = m + ωi 2 9 2 M m + 2 = ωf ωi m M + 9 2 final R/3 ωf M M m + 2 = ωf ωi m M + 9 2 initial R ωi Suppose that M = 6m then, M 6m m + 2 ω = ωf i m 6m + 9 2 ω= f (1 + 3) 1 3 + 9 ω=i 1.29ωi final R/3 ωf M So the angular velocity increases when the boy moves in. If the boy’s mass is m = 25 kg, the carousel’s mass is 6m = 150 kg the initial angular velocity was ωi = 2 rad/s and R = 1.5 m. How much work did the boy do in pulling himself in to R/3? initial R ωi Wnc = ∆K + ∆U M There is no ∆U here so, final Wnc = ∆K = Kf − Ki 1 1 2 2 Wnc= If ωf − I i ωi 2 2 Above we found that, rad ω= 1.29ω=i 2.58 f s R/3 ωf M 1 I i mR + MR 2 = 2 1 2 2 Ii = m 6m R 4mR + = 2 initial 2 R ωi 2 = I i 4(25kg)(1.5m) = 225kg ⋅ m 2 M 2 R 1 2 I m MR = + f 3 2 1 2 1 = I f m R + 6mR 2 = 3.11mR 2 2 9 2 = I f 3.11(25kg)(1.5m) = 175kg ⋅ m 2 final R/3 ωf M initial So with, = I i 225kg ⋅ m 2 = I f 175kg ⋅ m 2 rad ωi =2.00 s rad ωf =2.58 s R ωi M 1 1 2 2 Wnc= If ωf − I i ωi 2 2 final Wnc = 582.4 J − 450 J = 132 J R/3 ωf M Summary of translational quantities and their rotational analogs