8. Vector-controlled induction motor drives
advertisement

8. Vector-controlled induction motor drives
• The previous control strategies
good steady-state but poor dynamic response
oscillation resulted from the air gap flux
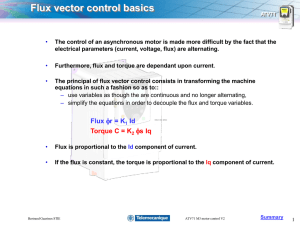
• Vector control (field-oriented control) is
related to the phasor control of the rotor flux
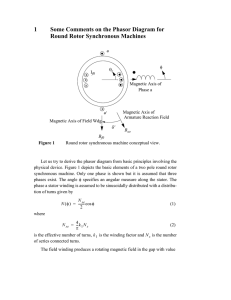
• 8.2 Principle of vector control
• Assume that the position of the rotor flux
linkages phasor λr is known.
• Let θf be referred to as field angle, and λr be
at θf from a stationary reference.
• The transformation in the synchronous frame
⎡ieqs ⎤
⎢e ⎥
⎢⎣ids ⎥⎦
⎡
2 ⎢ sin θf
= ⎢
3 ⎢cos θ
f
⎣
2π ⎤
2π
) sin(θf + ) ⎥ ⎡ ias ⎤
3 ⎢i ⎥
3
2π ⎥ ⎢ bs ⎥
2π
cos(θf − ) cos(θf + )⎥ ⎢ics ⎥
3 ⎦⎣ ⎦
3
sin(θf −
• The stator current phasor and
angle
e
is =
(ieqs )2
+ (ieds )2
−1 iqs
θs = tan { e }
ids
• Phasor diagram of the vector controller
• Summary of vector control
(i) Obtain the field angle
(ii) Calculate if*, for the required λr*
(iii) From λr* and the requied Te*, calculate
the stator current iT*.
(iv) Calculate the stator-current phasor
magnitude, is is*, from the vector sum of iT*
and if*.
(v) Calculate torque angle
*
−1 iT
θT = tan *
if
(vi) Add θT and θf to obtain θs.
(vii) Through the dqo transformation to abc
variables:
i*as = i*s sin θs
i*bs
i*cs
= i*s sin( θs −
= i*s sin( θs +
2π
)
23π
)
3
(viii) Synthesize these currents by using an
inverter.
• Direct vector control
• The phase-current control loops use
1. PWM
2. Hysteresis
3. Space-vector modulation
• Flux and torque processor implementation
• Voltage-source direct vector control
• 8.4 Derivation of indirect vector-control
• From the dynamic equations of the
induction machine in the synchronous
rotating reference frames.
• The electrical field angle
θf = θr + θs1
• Getting the slip angle by
θs1 = ∫ ωs1dt
• 8.5 Indirect vector-control scheme
• Flowchart
• 8.6 An implementation
• 8.10 Parameter sensitivity of …
• Parameter changing occurs a mismatch
between the vector controller and induction
motor.
• This mismatch produces
(i) The rotor flux linkage deviation.
(ii) The electromagnetic torque deviation.
(iii) An oscillation is caused both in the rotor
flux linkage and in torque response.
• Expression for electromagnetic torque
1 + ( ω*s1Tr* )2
Te
= αβ[
]
*
* * 2 Where
Te
1 + ( αωs1Tr )
Tr
α= *, β= *
Tr
Lm
• Expression for the rotor flux linkage
λr
λ*r
=β
1 + ( ω*s1Tr* )2
1 + ( αω*s1Tr* )2
• Steady-state results
ranges of α and β
0.5 < α < 1.5
0.8 < β < 1.2
Lm
• Torque and its command versus α
• Rotor flux linkage and its command versus α
• Parameter-sensitivity compensation
• Modified reactive-power compensation
• Parameter compensation with air gap-power
feedback control
• Parameter-compensated indirect vectorcontrolled induction motor drive
• Speed controller design