for System")
50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference<br>17th
4 - 7 May 2009, Palm Springs, California
AIAA 2009-2251
A Generalized Complementary Intersection Method (CIM)
for System Reliability Analysis
Pingfeng Wang1, Byeng D. Youn2, and Chao Hu3
Department of Mechanical Engineering, the University of Maryland at College Park
College Park, MD, 20742, USA
In many years, researchers desire to evaluate system reliability accurately and efficiently.
This paper presents a generalized Complementary Intersection Method (CIM) for system
reliability analysis for series, parallel, and mixed systems. The CIM provides an innovative
way to evaluate system reliability by decomposing the probability of a high-order joint
failure event into probabilities of complementary intersection events. However, its
application has been limited to a series system only. In this paper, a generalized CIM
framework is proposed for system reliability analysis with any system structure (or
configuration) (e.g., series, parallel, and mixed). The CIM is generalized for both parallel
and mixed system reliability. The System Structure Matrix (SS-Matrix) is proposed to
characterize any system structure in a comprehensive manner. The Binary Decision
Diagram (BDD) technique is employed to identify system’s mutually exclusive path sets, of
which each path set is a series system. On consequence, system reliability with any system
structure is decomposed into the probabilities of the mutually exclusive path sets, which can
be evaluated using different reliability analysis methods. Three examples are used to
demonstrate the uniqueness and effectiveness of the proposed methodology.
Nomenclature
Ei
Eij
EiEj
Pf
Φ
P(Ei)
fx(x)
pfs
Gi
β
=
=
=
=
=
=
=
=
=
=
event (or first-order complementary intersection event) of the ith system component
complementary intersection event for the ith and jth system components
the joint event of the ith and jth system components
probability of failure
standard Gaussian cumulative distribution function
probability of event Ei
probability density function
probability of system failure
function of the ith constraint
reliability index
I. Introduction
T
HE importance of reliability has been well conceived by engineers in the last few decades. Considerable
advances have been made in field of reliability assessment and Reliability-Based Design Optimization (RBDO)
[1-5]. However, the research in system reliability analysis has been stagnant, mainly due to two technical
difficulties. First, it is hard to formulate system reliability explicitly for a given system redundancy. Second, even if
system reliability is given explicitly, it’s extremely difficult to assess system reliability effectively with numerical
methods. Since system reliability prediction is of great importance in aerospace, mechanical, electronic and civil
engineering fields, its technical development will have an immediate and major impact on complex engineering
system designs.
Due to the difficulties, system reliability analysis provides the bounds of system reliability. Ditlevsen proposed
the most widely used second-order system reliability bounds method, which gives much tighter bounds compared
1
Graduate Student, pfwang@umd.edu, AIAA Student Member.
Assistant Professor, bdyoun@umd.edu, Corresponding Author, AIAA Member.
3
Graduate Student, huchaost@umd.edu
1
American Institute of Aeronautics and Astronautics
2
Copyright © 2009 by the American Institute of Aeronautics and Astronautics, Inc. All rights reserved.
with the first-order bounds for both series and parallel systems [6]. Other equivalent forms of Ditlevsen’s bounds
are given by Thoft-Christensen and Murotsu [7], Karamchandani [8], Xiao and Mahadevan [9] and K.
Ramachandran [10]. Recently, Song and Der Kiureghian formulated system reliability to a Linear Programming
(LP) problem, referred to as the LP bounds method [11]. The LP bounds method is able to calculate the optimal
bounds for system reliability based on available information. However, it is extremely sensitive to accuracy of the
given information, which is the probabilities for the first-, second-, or higher-order joint safety events. To assure
high accuracy of the LP bounds method for system reliability prediction, the probabilities must be given very
accurately.
Besides the system reliability bound methods, one of the most popular approaches is the multimodal adaptive
importance sampling (AIS) method, which is found satisfactory for the system reliability analysis of large structures
[12, 13]. The integration of surrogate model techniques with MCS-based methods can be an alternative approach to
system reliability prediction as well [14]. This approach can construct the surrogate model for multiple limit-state
functions to represent the joint failure region. This approach is quite practical but accuracy of the method depends
on fidelity of the surrogate model. It is normally expensive to build an accurate surrogate model with high
confidence.
Most recently, Youn and Wang [15] introduced an innovative concept of complementary intersection event and
proposed the Complementary Intersection Method (CIM) for system reliability analysis with any system structure
(e.g., series, parallel, and mixed). The CIM method provides not only a unique formula for system reliability but
also an effective numerical method to evaluate the system reliability with high efficiency and accuracy. The CIM
decomposes the probabilities of high-order joint failure events into probabilities of complementary intersection
events. For large scale systems, a CI-matrix was proposed to store the probabilities of component safety and
complementary intersection events. Then, series system reliability can be evaluated efficiently by any reliability
method, such as First-Order Reliability Method (FORM), Second-Order Reliability Method (SORM), Eigenvector
Dimension Reduction (EDR) method, or Monte Carlo Simulation (MCS). The accuracy and efficiency of these
reliability methods used for the evaluation of the CI-matrix were also compared. However, the application of the
CIM has been limited to a series system only.
The work presented in this paper is the continuous investigation of the CIM for system reliability analysis. In this
work, the CIM is advanced for parallel systems and mixed systems, and a generalized CIM framework is proposed
for system reliability analysis with any system structures. The CIM is generalized for both parallel and mixed
system reliability. The System Structure Matrix (SS-Matrix) is proposed to characterize any system structure in a
comprehensive manner. The Binary Decision Diagram (BDD) technique is employed to identify system’s mutually
exclusive path sets, of which each path set is a series system. On consequence, system reliability with any system
structure is decomposed into the probabilities of the mutually exclusive path sets, which can be evaluated using
different reliability analysis methods. Three examples are used to demonstrate the uniqueness and effectiveness of
the proposed methodology.
Section II reviews the complementary interaction method (CIM) and CI-matrix. Section III presents system
reliability analysis for series, parallel, and mixed system, and the proposed unified system reliability analysis
framework will be introduced in Section IV. The proposed method is demonstrated with three examples in Section
V.
II. Complementary Intersection Method (CIM)
This section reviews the Complementary Intersection Method (CIM). First, the complementary intersection (CI)
event is defined and the probability decomposition theorem is reviewed. Then, the probability of the second-order
joint failure event is defined in terms of the probability of component safety events and complementary intersection
events. Second, the CI-matrix is defined to facilitate the system reliability analysis for large-scale problems, which
is composed of the probabilities of the component safety and complementary intersection events.
A. CI event and probability decomposition theorem
This subsection reviews the definition of CI event. This event enables the decomposition of the probability of
any second or higher-order events into the probabilities of the CI events.
Definition: Complementary Intersection (CI) Event
Let an Nth-order CI event denote E12…N ≡ {X | G1⋅ G2 ⋅ …⋅ GN ≤ 0}, where the component safety (or 1st-order CI)
event is defined as Ei = {X | Gi ≤ 0, i = 1, 2, …, N}.
2
American Institute of Aeronautics and Astronautics
The defined Nth-order CI event is actually composed of N distinct intersections of component events Ei and their
complements Ēj in total where i = 1,…, N, j =1,..., N, i ≠ j. For example, for the second order CI event Eij, it is
composed of two distinct intersection events, Ē1E2 and E1Ē2. These two events are the intersections of E1 (or E2) and
the complementary event of E2 (or E1). Thus, we refer to the defined event as the Complementary Intersection (CI)
Event.
Theorem: Decomposition of the Probability of an Nth-Order Joint Safety Event
With the definition of the CI event, the probability of an Nth-order joint safety event can be decomposed into the
probabilities of the CI events as
N
N
N
N
N
1
m −1
N −1
P ∩ Ei = N −1 ∑ P ( Ei ) − ∑ P ( Eij ) + ∑ P ( Eijk ) + + ( −1)
P
E
+
+
−
1
P
E
(
)
(
)
∑
ijl
12 N
i =1;
i =1;
i =1;
i =1 2 i =1
m
j = 2;
j = 2;
j = 2;
i< j
k =3
i< j<k
l =m
i < j << l
(1)
The detailed derivation of Eq. (1) can be found in Ref. [15]. It is noted that each CI event has its own limit state
function, which enables the use of any reliability analysis methods. In general, higher-order CI events are expected
to be highly nonlinear. Considering the tradeoff between computational efficiency and accuracy, this paper uses the
probabilities of the first and second-order CI events in Eq. (1) for system reliability analysis. However, more terms
in Eq. (1) can be employed as advanced reliability analysis methods are developed in future.
Based on the definition of the CI event, the second-order CI event can be denoted as Eij ≡ {X | Gi ⋅ Gj ≤ 0}. The
CI event can be further expressed as Eij = Ēi Ej ∪ Ei Ēj where the component failure events are defined as Ēi = {X |
Gi > 0} , Ēj = {X | Gj > 0}. The event Eij is composed of two events: Ei Ēj = {X | Gi ≤ 0 ∩ Gj > 0} and Ēi Ej = {X | Gi
> 0 ∩ Gj ≤ 0}. Since the events, Ēi Ej and Ei Ēj, are disjoint, the probability of the CI event Eij can be expressed as
P( Eij ) ≡ P( X | Gi ⋅ G j ≤ 0)
= P( X | Gi > 0 ∩ G j ≤ 0) + P( X | Gi ≤ 0 ∩ G j > 0)
(2)
= P( Ei E j ) + P( Ei E j )
Based on the probability theory, the probability of the second-order joint safety event Ei ∩ Ej can be expressed
as
P( Ei E j ) = P( Ei ) − P( Ei E j )
(3)
= P( E j ) − P( Ei E j )
From Eqs. (2) and (3), the probabilities of the second-order joint safety and failure events can be decomposed as
1
P ( Ei E j ) = P ( Ei ) + P ( E j ) − P ( Eij )
(4)
2
1
P( E i E j ) = 1 − P( Ei ) + P( E j ) + P ( Eij )
(5)
2
B. CI-matrix
For large-scale systems, the CI events can be conveniently written in the CI-matrix. For instance, if the system
includes m components in total, the CI-matrix is defined as
P ( E1 ) P ( E12 ) P ( E13 ) P ( E1m )
P ( E2 ) P ( E23 ) P ( E2 m )
(6)
CI = P ( E3 ) P ( E3m )
P
(
E
)
m
In the upper triangular CI-matrix, the diagonal elements correspond to the component reliabilities (or
probabilities of the first-order CI events) and the element on ith row and jth column corresponds to the probability of
the second-order CI event Eij if j < i. The probabilities of the second-order joint safety and failure events in Eqs. (4)
and (5) can be evaluated with the probabilities of all component safety and complementary intersection events found
from the CI-matrix. The CI-matrix facilitates to evaluate system reliability. The probability of the complementary
3
American Institute of Aeronautics and Astronautics
intersection events can be computed using any reliability analysis method, such as MCS, FORM, SORM, EDR
method and Stochastic Expansion (SE) methods and so on.
III. Generalized CIM for System Reliability Analysis
This section will generalize the CIM for system reliability analysis for series, parallel, and mixed systems.
Section A will briefly review the CIM for series system reliability analysis from Ref. [15]. The proposed CIM for
parallel and mixed system reliability analysis are developed in Sections B and C, respectively. Section D provides a
generalized CIM framework for system reliability analysis.
A. Series system reliability analysis
Although the second-order system reliability bounds method or the LP bounds method can generally give fairly
narrow system reliability bounds, system reliability is not unique with an explicit formula. This section introduces
an explicit formula for system reliability assessment, which is developed based a mathematical inequality equation.
In addition to the second-order reliability bounds method and LP bounds method, this explicit formula can provide
an alternative way for system reliability assessment.
Considering a structural serial system with m components, the probability of system failure can be expressed as
m
Pfs = P ∪ Ei
i =1
(7)
th
where pfs represents the probability of system failure and Ēi denotes the failure event of the i component. Based on
the well known Boolean bounds in Eq. (8), the first-order system reliability bound is given in Eq. (9), suggested by
Ang and Amin [10] and Cornell [11].
m
m
max( P( Ei )) ≤ P(∪ Ei ) ≤ ∑ P ( Ei )
i =1
i
(8)
i =1
m
max P Ei ≤ Pfs ≤ min ∑ P Ei , 1
i =1
( )
( )
(9)
However, these methods provide wide bounds of system reliability. Thus, the second-order bounds method proposed
by Ditlevsen [14] in Eq. (10) is widely used because it gives quite narrow bounds of system reliability.
m
i −1
m
m
P E1 + ∑ max P Ei − ∑ P Ei E j , 0 ≤ Pfs ≤ min ∑ P Ei − ∑ max P Ei E j , 1
j <i
i =2
j =1
i=2
i =1
( )
( )
(
)
( )
(
)
(10)
where E1 is the event having the largest probability of failure.
Since the probabilities of all events are non-negative, the following inequalities must be satisfied as
2
m
max( P( Ei )) ≤
i
m
P( Ei ) ≤ ∑ P( Ei )
∑
i =1
i =1
(11)
Based on Eqs.(10) and (11), the probability of system failure (Pfs) of a serial system failure can be simplified to a
unique explicit formula as
m
Pfs ≅ P E1 + ∑ P Ei −
( )
i=2
i −1
( ) ∑ P ( E E )
i
2
(12)
j
j =1
It is proven in Ref.[15] that this approximate probability lies in the second-order bounds in Eq. (10).
From Eq. (12), serial system reliability can be assessed as (1 − the probability of system failure) and formulated
as
m
Rs = P( E1E2 Em −1Em ) ≅ P ( E1 ) − ∑ P Ei −
i=2
i −1
( ) ∑ P ( E E )
i
j =1
j
2
A,
where A ≡
0,
if A > 0
if A ≤ 0
(13)
Note that the terms inside the bracket, ⟨ ⟩, should be ignored if it is less than zero and Rs should be set to zero if
the approximated one given by Eq. (13) is less than zero. Equation (13) provides an explicit and unique formula for
system reliability assessment based on the second-order reliability bounds shown in Eqn.(10) and an inequality
equation (11). To the application of large system with multiple failure events, The CI-matrix facilitates to evaluate
system reliability. The probability of the CI events can be computed using any reliability analysis method, such as
MCS, First-Order Reliability Method (FORM), Second-Order Reliability Method (SORM), Eigenvector Dimension
Reduction (EDR) Method or Stochastic Expansion (SE) methods.
B. Parallel system reliability analysis
4
American Institute of Aeronautics and Astronautics
A parallel system reliability formula can be obtained based on the formula of series system reliability by using
the De Morgan’s law. According to the De Morgan’s law, the probability of parallel system failure can be expressed
as
m
m
m
P ∩ Ei = 1 − P ∩ Ei = 1 − P ∪ Ei
i =1
i =1
i =1
(14)
___
where Ei is the ith component failure event.
Eq. (14) relates the probability of failure of a parallel system with the probability of series system safety
(reliability). If we treat Ei as the ith component failure event in a series system, the right side of Eq. (14) is then the
series system reliability. Based on this relationship, the probability of parallel system failure can be obtained from
Eq. (13) by treating safe events in the series system as failure events in the parallel system as
A, if A > 0
A ≡
(15)
i=2
j =1
0, if A ≤ 0
Finally, parallel system reliability can be obtained from Eq. (15) by one minus the probability of system failure as
i −1
m
P(failure of a parallel system) ≅ P( E1 ) − ∑ P( Ei ) −
m
Rs _ parallel ≅ P( E1 ) + ∑ P( Ei ) −
i=2
∑ P ( E E )
i
i −1
∑ P ( E E )
i
j
2
,
j =1
2
j
,
A,
A ≡
0,
if A > 0
if A ≤ 0
(16)
C. Mixed system reliability analysis
A mixed system may have various system structures (or configurations). There is no unique system reliability
formula available for a mixed system. This study develops a systematic procedure for mixed system reliability
analysis using the CIM. The developed procedure is introduced below with a mixed system example. Considering a
mixed system with N components, the following procedure can be proceeded to carry out system reliability analysis.
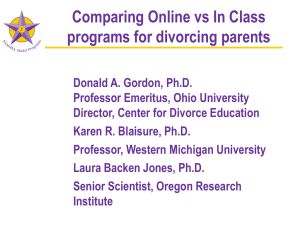
Step I: Constructing a System Structure Matrix (SS-Matrix)
A 3-by-M SS-Matrix can be used to model the system structure in a systematic manner. The first row of the
matrix contains a component number, while the second and third rows correspond to the starting and end nodes of
the component. Generally, the total number of columns of a SS-Matrix, M, is equal to the total number of system
components, N. In the case of complicated system structures, one component may repeatedly appear in between
different sets of nodes and, consequently, M could be larger than N, for example a 2-out-of-3 system.
E6
①
⑤
③
E1
E2
②
E3
E4
⑥
E5
④
E7
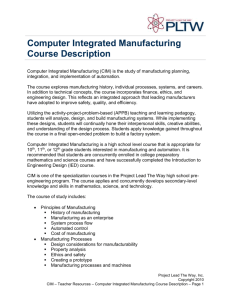
Figure 1 A mixed-system block diagrams
Let us consider a mixed system with 7 components, as shown in Fig. 1. The system structure matrix is a 3×7
matrix. The first column of the system structure matrix, [1, 1, 2]T, indicates that the 1st component connects nodes 1
and 2. The SS-Matrix for the system in Fig. 1 can be constructed as
1 2 3 4 5 6 7
SS- Matrix = 1 2 3 4 5 2 3
2 3 4 5 6 4 5
Step II: Finding system path sets based on the SS-Matrix
Based on the SS-Matrix, the Binary Decision Diagram (BDD) technique can be employed to find the mutually
exclusive system path sets, of which each path set is a series system. More information on the BDD can be found in
references [16] and [17].
5
American Institute of Aeronautics and Astronautics
For the mixed system shown in Fig. 2, the mutually exclusive path sets can be found by using the BDD as
{
Pathset = E1 E2 E3 E4 E5 , E1 E2 E6 E4 E5 , E1 E2 E3 E7 E5 , E1 E2 E6 E4 E3 E7 E5
}
Step III: Calculating system reliability for all mutually exclusive path sets and the overall system
Due to the mutual exclusiveness, the mixed system reliability, RM, is the sum of the probabilities of all paths as
Np
Np
Rs _ mixed = Pr ∪ Path i = ∑ Pr ( Path i )
(17)
i =1
i =1
where Pathi is the ith mutually exclusive path set obtained by the BDD and Np is the total number of mutually
exclusive path sets. For the system in Fig. 2, the system reliability can be calculated as
4
4
Rs _ mixed = Pr ∪ Path i = ∑ Pr ( Path i )
(18)
i =1
i =1
= Pr( E1 E2 E3 E4 E5 ) + Pr( E1 E2 E6 E4 E5 ) + Pr( E1 E2 E3 E7 E5 ) + Pr( E1 E2 E6 E4 E3 E7 E5 )
where the probability of each individual path set can be calculated using the series system reliability formula in
Eq.(13).
D. Generalized CIM framework for system reliability analysis
As a series system or a parallel system can be viewed as special case of a mixed system, the proposed CIM with
the SS-Matrix and BDD can perform system reliability analysis with any system structures (or configurations) (e.g.,
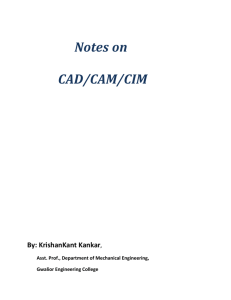
series, parallel, and mixed). Figure 2 shows a generalized CIM framework for system reliability.
Figure 2 A generalized CIM framework for system reliability analysis
IV. Case Studies
This section presents three case studies for a series system, a parallel system and a mixed system, respectively, to
demonstrate the efficiency and accuracy of the proposed generalized CIM for system reliability. For each case study,
the generalized CIM framework is demonstrated in a wide range of system reliability levels and compared with
Monte Carlo Simulation (MCS). For series and parallel systems, the results of the generalized CIM framework are
also compared with First-Order Bound (FOB) and Second-Order Bound (SOB) methods. The main objective of the
examples is to demonstrate the accuracy of the proposed generalized CIM framework for system reliability analysis.
So in three examples we focus on a mathematical error produced by a system reliability formulae rather than a
numerical error by a numerical method. In order to eliminate the numerical error in system reliability analysis, the
Monte Carlo Simulation (MCS) with 1,000,000 sample points is used to obtain the CI matrix.
A. Series system example: an internal combustion engine system
The following internal combustion engine case study demonstrates the application of the generalized CIM for
series system reliability analysis. Five random variables are considered in this example: the cylinder bore b,
compression ratio cr, exhaust valve diameter dE, intake valve diameter dI, and the revolutions per minute (rpm) at
peak power, ω. All the random variables are assumed to follow normal distribution with statistical information
shown in Table 1. More detail information of this example can be found in Ref. [19].
6
American Institute of Aeronautics and Astronautics
Table 1 Statistical information of input random variables for combustion engine
Random Variable
b (mm)
cr (mm)
dE (mm)
dI
ω, (×10-3)
Mean
-----------
Standard Deviation
0.40
0.15
0.15
0.05
0.25
Distribution Type
Normal
Normal
Normal
Normal
Normal
From a thermodynamic viewpoint, nine component safety events are defined as follows:
E1 = {1.2 N c b − 400 ≤ 0}
{
( min. bore wall thickness )
0.5
}
E2 = 8V / ( 200π N c ) − b ≤ 0
( max. engine height )
E3 = {d I + d E − 0.82b ≤ 0}
( valve geometry and structure )
E4 = {0.83d I − d E ≤ 0}
( min. value diameter ratio )
E5 = {d E − 0.89d I ≤ 0}
( max. value diameter ratio )
−5
E6 = 9.428 × 10 4V / (π N c ) (ω /d I 2 ) − 0.6Cs ≤ 0 ( max. Mech/Index )
E7 = {0.045b + cr − 13.2 ≤ 0}
( knock-limit compression ratio )
E8 = {ω − 6.5 ≤ 0}
( max. torque converter rpm )
E9 = {230.5Qηtw − 3.6 × 106 ≤ 0} ( max. fuel economy )
{
(19)
}
where
ηtw = 0.85951(1 − cr−0.33 ) − Sv , V = 1.859 × 106 mm3
Q = 43,958 kJ/kg, Cs = 0.44, and N c = 4
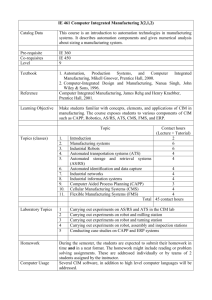
In this study, system reliability analyses are performed at the eight different design points as listed in Table 2.
These design points are the reliability-based optimum designs using FORM with eight different target component
reliability levels from 80% to 99.9%. The results of system reliability analysis at these design points are summarized
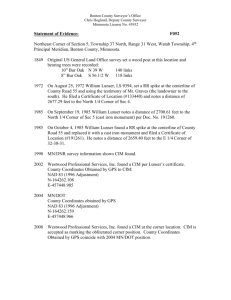
in Table 3 and also graphically shown in Fig. 3. From the results, it is found that the first-order bounds method gives
too wide bounds to be of practical use. Whereas, the second-order bounds method gives tighter bounds. The
generalized CIM method provides more accurate results at all reliability levels and its high accuracy is maintained at
high reliability levels, which are often encountered in engineering practices. The error in the CIM comes from the
probabilities of the third- or higher-order joint failure events. As the reliability level decreases, the effects of the
third- or higher-order joint failure events increase. That is why the error increases as the system reliability decreases.
Table 2 Eight different design points for system reliability analysis
designs points
1
2
3
4
5
6
7
8
b
82.1025
82.3987
82.5511
82.6770
82.8234
82.8750
82.9204
82.9977
Mean values for random variables
cr
dE
dI
35.8039
30.3274
9.3397
36.1754
30.4835
9.3684
36.3630
30.5676
9.3811
36.5187
30.6334
9.3920
36.7006
30.7121
9.4049
36.7655
30.7407
9.4096
36.8222
30.7657
9.4137
36.9197
30.8084
9.4204
7
American Institute of Aeronautics and Astronautics
ω
5.2827
5.5983
5.7550
5.8901
5.9498
5.9754
5.9772
5.9795
Table 3 Results of System Reliability Analysis with MCS, FOB using MCS, SOB using MCS, and Generalized
CIM using MCS (N=1,000,000)
Analysis Method
FOB
SOB
1
2
System Reliability Level at Each Design
3
4
5
6
7
8
Upper
0.9989
0.9899
0.9745
0.9495
0.8984
0.8742
0.8490
0.7988
Lower
0.9949
0.9506
0.8744
0.7432
0.5367
0.4318
0.3410
0.1513
Upper
0.9949
0.9520
0.8822
0.7741
0.6224
0.5554
0.4987
0.3967
Lower
0.9949
0.9517
0.8798
0.7653
0.5929
0.5190
0.4418
0.3049
CIM
0.9949
0.9518
0.8805
0.7674
0.6026
0.5312
0.4612
0.3371
MCS
0.9949
0.9520
0.8820
0.7731
0.6179
0.5476
0.4871
0.3748
Figure 3 Results of system reliability analysis at eight different reliability levels
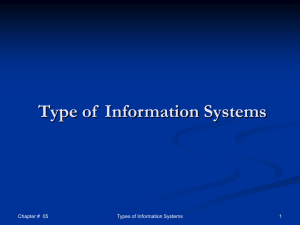
B. Parallel System Example: A Ten Brittle Bar System
The following ten-bar system example demonstrates the application of the generalized CIM framework for
parallel systems. As shown in Fig. 4, ten brittle bars are connected in parallel to sustain a load applied at one end.
This case study is modified from the example employed in Ref. [20] by increasing the total number of bars from 2 to
10. Ten bars are all brittle with different fracture strains εf, and the strain level for the maximum allowable load
should be one of the ten fracture strain levels. At the ith fracture strain level εfi, components with fracture strains
below εfi fail, and the overall allowable load is simply the strength summation of components with fracture strains
above εfi. Thus, as the maximum allowable load, the system strength RT can be formulated as at ten fracture strain
levels εf1,…, εf10, as shown in Eq. (20).
8
American Institute of Aeronautics and Astronautics
10
10
RT = max ∑ R j (ε ) = max ∑ R j (ε fi )
ε
j =1
1≤i ≤10 j =i
(20)
R1 (ε f 1 ) + R2 (ε f 1 ) + R3 (ε f 1 ) + R4 (ε f 1 ) + R5 (ε f 1 ) + R6 (ε f 1 ) + R7 (ε f 1 )
+ R8 (ε f 1 ) + R9 (ε f 1 ) + R10 (ε f 1 ),
R2 (ε f 2 ) + R3 (ε f 2 ) + R4 (ε f 2 ) + R5 (ε f 2 ) + R6 (ε f 2 ) + R7 (ε f 2 )
= max
+ R8 (ε f 2 ) + R9 (ε f 2 ) + R10 (ε f 2 ),
......
R10 (ε f 10 )
1
2
……
10
F
(a)
(b)
Figure 4 Ten brittle bar parallel system: (a) system structure model; (b) brittle material behavior in parallel
system
For example, at fracture strain εf2, the 1st brittle bar fails due to fracture and thus does not contribute to the
overall system strength, which becomes the strength summation of the surviving nine brittle bars. This scenario can
be treated as a component corresponding to fracture strain εf2. There are totally ten components corresponding to ten
strain levels, respectively, as shown in Eq.(20). The brittle bar system fails to sustain the load F only if all the ten
components fail. This is a parallel system with ten components. The component safety events can be expressed in
terms of several random variables.
10
10
j =i
j =i
Gi = F − ∑ R j (ε fi ) = F − ∑ ( E j Aj ) ⋅ ε fi ,
1 ≤ i ≤ 10
(21)
where, Rj represents the allowable load that can be sustained by the jth brittle bar; Aj the cross section area of the jth
brittle bar; Ej Young’s modulus of the jth brittle bar.
Random variables and their random properties are summarized in Table 4. Ten different system reliability levels
are used for comparison with ten different loading conditions (F). These loading points are used to validate the
generalized CIM method at different reliability levels. Table 5 summarizes the results of system reliability analysis
which are graphically summarized in Fig. 5. It can be seen that the first-order bounds are too wide to be of practical
use. Whereas, the second-order bounds method gives tighter system reliability bounds compared with the first order
bounds method. The generalized CIM method provides more accurate results at all reliability levels and its high
accuracy is maintained at high reliability levels, which are often encountered in engineering practices. The error in
the CIM comes from the probabilities of the third- or higher-order joint failure events. For a parallel system, as the
reliability level decreases, the effects of the third- or higher-order joint failure events also decrease. That is why the
error decreases as the system reliability decreases.
9
American Institute of Aeronautics and Astronautics
Table 4 Statistical information of input random variables for the ten bar system
Random Variable
E1-E10 (GPa)
A1 (mm2)
A2 (mm2)
A3 (mm2)
A4 (mm2)
A5 (mm2)
A6 (mm2)
A7 (mm2)
A8 (mm2)
A9 (mm2)
A10 (mm2)
εf1
εf2
εf3
εf4
εf5
εf6
εf7
εf8
εf9
εf10
F (kN)
Mean
200.0
100.0
120.0
140.0
140.0
140.0
150.0
150.0
150.0
200.0
300.0
0.0010
0.0012
0.0018
0.0025
0.0027
0.0030
0.0033
0.0036
0.0040
0.0050
---
Standard Deviation
10.0
5.0
5.0
5.0
10.0
10.0
10.0
15.0
15.0
15.0
25.0
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008
0.0009
0.0010
0.0011
30.0
Distribution Type
Gumbel
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Lognormal
Uniform
Uniform
Uniform
Uniform
Uniform
Uniform
Uniform
Uniform
Uniform
Uniform
Normal
Table 5 Results of System Reliability Analysis with MCS, FOB using MCS, SOB using MCS, and Generalized
CIM using MCS (N=1,000,000)
Analysis
Method
System Reliability Level at Each Design
1
2
3
4
5
6
7
8
9
10
Upper
0.4133
0.5639
0.7331
0.9216
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
Lower
0.1594
0.2054
0.2507
0.2974
0.3444
0.4395
0.4865
0.5334
0.5803
0.9705
Upper
0.3537
0.467
0.5854
0.7065
0.8293
1.0000
1.0000
1.0000
1.0000
1.0000
Lower
0.3192
0.4062
0.4849
0.5507
0.6068
0.6917
0.7161
0.7459
0.7897
0.9943
CIM
0.3417
0.4456
0.5490
0.6482
0.7388
0.8714
0.9017
0.9069
0.9051
0.9943
MCS
0.3301
0.4272
0.5226
0.6131
0.6961
0.8314
0.8813
0.9192
0.9476
0.9998
FOB
SOB
10
American Institute of Aeronautics and Astronautics
Figure 6 Results of system reliability analysis at ten different reliability levels
C. Mixed System Example: A Cantilever Beam-Bar Mixed System
The following cantilever beam-bar system [18] is employed in this study to demonstrate the effectiveness of the
generalized CIM framework for mixed system reliability analysis. The system is considered as an ideally elasticplastic cantilever beam supported by an ideally rigid-brittle bar, with a load applied at the midpoint of the beam, as
shown in Fig. 6. There are three failure modes and five independent failure events E1 ~ E5. These three failure
modes are formed by different combinations of failure events as:
• 1st Failure Mode: The fracture of the brittle bar (event E1) occurs, and subsequently the formation of a hinge at
the fixed point of the beam (event E2).
• 2nd Failure Mode: The formation of a hinge at the fixed point of the beam (event E3) followed by the formation
of another hinge at the midpoint of the beam (event E4).
• 3rd Failure Mode: The formation of a hinge at the fixed point of the beam (event E3) followed by the fracture of
the brittle bar (event E5).
The five safety events can be expressed as:
E1 = { X , T | 5 X /16 − T ≤ 0} ,
E2 = { X , L, M | LX − M ≤ 0} ,
E3 = { X , L, M | 3LX / 8 − M ≤ 0} ,
E4 = { X , L, M | LX / 3 − M ≤ 0} ,
E5 = { X , L, M , T | LX − M − 2 LT ≤ 0}
Considering these three failure modes, the system success event can be obtained as:
ES = ( E1 ∪ E2 ) ∩ { E3 ∪ ( E4 ∩ E5 )}
(22)
(23)
The statistical information of the random input variables is given in Table 6. Ten different system reliability levels
are used for comparison with ten different loading conditions (X). Figure 7 shows the system block diagram.
Figure 6 A Cantilever beam-bar system
11
American Institute of Aeronautics and Astronautics
Table 6 Statistical information of input random variables
Random Variable
L
T
M
X
Mean
5.0
1000
150
---
①
Standard Deviation
0.05
300
30
20
②
Distribution Type
Normal
Normal
Normal
Normal
④
③
Figure 7 System block diagram for mixed system example
From the system block diagram shown in Fig. 7, the SS-Matrix for this mixed system can be obtained by its
definition as:
1 2 3 4 5
SS-Matrix = 1 1 2 2 3
2 2 4 3 4
With this SS-Matrix, the BDD can be constructed as shown below in Fig. 8
Figure 8 BDD diagram for mixed system example
The BDD shown in Fig. 8 indicates the following mutually exclusive system path sets as
Pathset = {E1 E3 , E1 E2 E3 , E1 E3 E4 E5 , E1 E2 E3 E4 E5 }
The system reliability analysis is carried out with ten different loading conditions (X) using the generalized
CIM. The MCS is used for a benchmark solution. Table 7 summarizes the results. It can be found that the CIM gives
very accurate mixed system reliability results at all reliability levels.
In recent literature, the LP bound method was developed [18] and is able to calculate the optimal bounds for
mixed system reliability based on available information. Results regarding this example using the LP bound method
can be found in Ref. [18]. Compared with the LP bound method, the generalized CIM not only gives a unique
estimate of mixed system reliability, but also provides numerical schemes for system reliability. It is known that the
LP bound method can suffer when an approximate LP algorithm is used for over constrained problems. Besides, it is
extremely sensitive to the accuracy of the given input information, which are the probabilities for the first-, second-,
and high-order joint safety events.
12
American Institute of Aeronautics and Astronautics
Table 7 Results of different system reliability analysis methods:
(1) MCS, (2) Complementary Interaction Method (CIM) using MCS (N=1,000,000)
System Reliability at Each Point
Analysis
Method
1
2
3
4
5
6
7
8
9
10
CIM
0.3546
0.4251
0.4981
0.5724
0.6444
0.7110
0.7708
0.8666
0.9308
0.9681
MCS
0.3548
0.4252
0.4982
0.5725
0.6445
0.7111
0.7708
0.8667
0.9309
0.9681
V. Conclusion
This paper presented a generalized Complementary Intersection Method (CIM) for system reliability analysis
for series, parallel, and mixed systems. The CIM decomposes the probability of a high-order joint failure event into
probabilities of complementary intersection events, and provides an innovative way to evaluate system reliability.
However, its application has been limited to a series system only. In this paper, a generalized CIM framework is
proposed for system reliability analysis for a system with any structure or configuration (e.g., series, parallel, and
mixed). Within the generalized framework, (i) the CIM was firstly generalized for parallel system reliability analysis
with a unique explicit formula, (ii) the System Structure Matrix (SS-Matrix) was proposed to characterize any
system structure in a comprehensive manner, and (iii) the Binary Decision Diagram (BDD) technique is employed to
identify system’s mutually exclusive path sets, of which each path set is a series system. On consequence, system
reliability with any system structure is decomposed into the probabilities of the mutually exclusive path sets, which
can be evaluated as series systems using the CIM formula by different reliability analysis methods. The proposed
CIM framework is generally applicable for system reliability analysis for different engineering systems, regardless
the structure or configuration. The proposed methodology was demonstrated to be effective and efficient by three
case studies, one for series systems, one for parallel systems, and one for mixed systems.
Acknowledgments
The work presented in this paper has been partially supported by US National Science Foundation (NSF) under
Grand No. GOALI-07294, U.S. Army TARDEC by the STAS contract (TCN-05122), General Motors under Grant
No. TCS02723.
References
1
Youn, Byeng D., Choi, K. K., and Du, L., “Enriched Performance Measure Approach (PMA+) for ReliabilityBased Design Optimization,” AIAA Journal, Vol. 43, No. 4, pp. 874-884, 2005.
2
Chen, X., Hasselman, T.K., and Neill, D. J., “Reliability-Based Structural Design Optimization for Practical
Applications,” 38th AIAA SDM Conference, AIAA-97-1403, 1997.
3
4
Du, X., and Chen, W., “Sequential Optimization and Reliability Assessment Method for Efficient Probabilistic
Design,” ASME, Journal of Mechanical Design, Vol. 126, No. 2, pp. 225-233, 2004.
Wu, Y-T., Shin, Y., Sues, R. H., and Cesare, M. A., “Safety-Factor Based Approach for Probability-Based Design
Optimization,” AIAA-2001-1522, 42nd AIAA/ASME/ASC /AHS/ASC SDM Conference & Exhibit, Seattle,
Washington, April, 2001.
5
Wang, L, Kodiyalam, S., “An Efficient Method for Probabilistic and Robust Design with Non-normal
Distributions,” 43rd AIAA SDM Conference, Denver, Colorado, April 2002.
6
Ditlevsen, O., and Bjerager, P. “Narrow Reliability Bounds for Structural Systems.” Journal of the Engineering
Mechanics, ASCE, Vol 110, No.5, pp. 671-693, 1984.
7
Thoft-Christensen, P., and Murotsu, Y. Application of Structural Reliability Theory. Springer Verlag, Berlin, 1986.
8
Karamchandani, A. “Structural System Reliability Analysis Methods.” Report No. 83, John A. Blume Earthquake
Engineering Center, Stanford University, Stanford, CA, 1987.
13
American Institute of Aeronautics and Astronautics
9
Xiao Q., and Mahadevan, S. “Second –Order Upper Bounds on Probability of Intersection of Failure Events.”
Journal of Engineering Mechanics, ASCE, Vol. 120, No.3, pp.49-57, 1998.
10
Ramachandran K., "System Reliability Bounds: A New Look with Improvements", Civil Engineering and
Environmental Systems, Vol. 21, No. 4, pp.265-278, December, 2004.
11
Junho Song and Armen Der Kiureghian, 2003, “Bounds on System Reliability by Linear Programming”, ASCE
Journal of Engineering Mechanics.
12
Mahadevan, S., and Raghothamachar, P.,2000, “Adaptive Simulation for System Reliability Analysis of Large
Structures,” Comput. Struct., 77, 725-734
13
Zou T. and Mahadevan, S., 2006, “Versatile Formulation for Multi-objective Reliability-Based Design
Optimization,” Journal of Mechanical Design, ASME, Nov, Vol.128 /1217.
14
Zhou, L., Penmetsa, R.C., and Grandhi, R.V., 2000, “Structural System Reliability Prediction Using Multi-Point
Approximations for Design,” 8th ASCE Specialty Conference on Probabilistic Mechanics and Structural
Reliability, PMC2000-082.
15
Youn, Byeng D., and Wang, P., “Complementary Intersection Method for System Reliability Analysis,” ASME, J.
Mech. Des. Vol. 131, Issue 4, 041004 (15), April, 2009 .
16
Lee CY. Representation of switching circuits by binary-decision programs, Bell Syst Tech J 1959;38:985–99.
17
Akers B. Binary decision diagrams. IEEE Trans Comput 1978; C-27(6):509–16.
18
Song, J., Der Kiureghian, “A. Bounds on Systems Reliability by Linear Programming,” Journal of Engineering
Mechanics, Vol. 129, Issue 6, pp. 627-636 , 2003.
19
Liang, J.H., Mourelatos, Z.P., and Nikolaidis E., “A Single-Loop Approach for System Reliability-Based Design
Optimization, ” ASME, Journal of Mechanical Design, Vol. 126, No. 2, pp. 1215-1224, 2007.
20
Mahadevan, S,, Zhang, R.X., and Smith, N., “Bayesian networks for system reliability reassessment,” Structural
Safety, Vol. 23, No. 3, pp. 231-251, 2001.
14
American Institute of Aeronautics and Astronautics
 for System")