Physics 107 HOMEWORK ASSIGNMENT #8

Physics 107 HOMEWORK ASSIGNMENT #8
Cutnell & Johnson, 7 th
edition
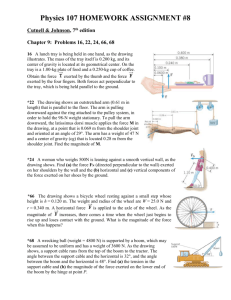
Chapter 9: Problems 16, 22, 24, 60, 68
16 A lunch tray is being held in one hand, as the drawing illustrates. The mass of the tray itself is 0.200 kg, and its center of gravity is located at its geometrical center. On the tray is a 1.00-kg plate of food and a 0.250-kg cup of coffee.
Obtain the force exerted by the thumb and the force exerted by the four fingers. Both forces act perpendicular to the tray, which is being held parallel to the ground.
*22 The drawing shows an outstretched arm (0.61 m in length) that is parallel to the floor. The arm is pulling downward against the ring attached to the pulley system, in order to hold the 98-N weight stationary. To pull the arm downward, the latissimus dorsi muscle applies the force M in the drawing, at a point that is 0.069 m from the shoulder joint and oriented at an angle of 29°. The arm has a weight of 47 N and a center of gravity (cg) that is located 0.28 m from the shoulder joint. Find the magnitude of M .
*24 A woman who weighs 500N is leaning against a smooth vertical wall, as the drawing shows. Find (a) the force F
N
(directed perpendicular to the wall) exerted on her shoulders by the wall and the (b) horizontal and (c) vertical components of the force exerted on her shoes by the ground.
**60 A small 0.500-kg object moves on a frictionless horizontal table in a circular path of radius 1.00 m. The angular speed is 6.28 rad/s. The object is attached to a string of negligible mass that passes through a small hole in the table at the center of the circle. Someone under the table begins to pull the string downward to make the circle smaller. If the string will tolerate a tension of no more than 105 N, what is the radius of the smallest possible circle on which the object can move?
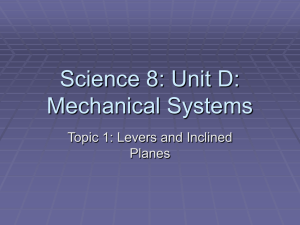
*68 A wrecking ball (weight = 4800 N) is supported by a boom, which may be assumed to be uniform and has a weight of 3600 N. As the drawing shows, a support cable runs from the top of the boom to the tractor. The angle between the support cable and the horizontal is 32°, and the angle between the boom and the horizontal is 48°. Find (a) the tension in the support cable and (b) the magnitude of the force exerted on the lower end of the boom by the hinge at point P .
16.
REASONING AND SOLUTION The net torque about an axis through the contact point between the tray and the thumb is
Σ τ = F (0.0400 m) − (0.250 kg)(9.80 m/s
2
)(0.320 m) − (1.00 kg)(9.80 m/s
2
)(0.180 m)
− (0.200 kg)(9.80 m/s
2
)(0.140 m) = 0
F = 70.6 N, up
Similarly, the net torque about an axis through the point of contact between the tray and the finger is
Σ τ = T (0.0400 m) − (0.250 kg)(9.80 m/s
2
)(0.280 m) − (1.00 kg)(9.80 m/s
2
)(0.140 m)
− (0.200 kg)(9.80 m/s
2
)(0.100 m) = 0
T = 56.4 N, down
22.
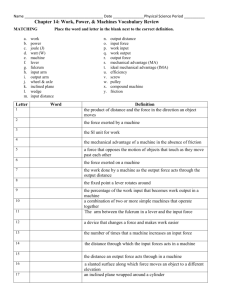
REASONING The arm, being stationary, is in equilibrium, since it has no translational or angular acceleration. Therefore, the net external force and the net external torque acting on the arm are zero. Using the fact that the net external torque is zero will allow us to determine the magnitude of the force
M . The drawing at the right shows three forces: M , the 47-N weight of the arm acting at the arm’s center of gravity (cg), and the
Axis
29 °
0.28 m
0.069 m
0.61 m cg
47 N
98 N
98-N force that acts upward on the right end of the arm. The 98-N force is applied to the
M arm by the ring. It is the reaction force that (0.070 m) sin 29 ° arises in response to the arm pulling downward on the ring. Its magnitude is 98 N, because it supports the 98-N weight hanging from the pulley system. Other forces also act on the arm at the shoulder joint, but we can ignore them. The reason is that their lines of action pass directly through the axis at the shoulder joint, which is the axis that we will use to determine torques. Thus, these forces have zero lever arms and contribute no torque.
SOLUTION The magnitude of each individual torque is the magnitude of the force times the corresponding lever arm. The forces and their lever arms are as follows:
Force Lever Arm
98 N 0.61 m
47 N 0.28
M (0.069 m) sin 29 °
Each torque is positive if it causes a counterclockwise rotation and negative if it causes a clockwise rotation about the axis. Thus, since the net torque must be zero, we see that
( )( ) ( )(
Solving for M gives
( )( ) ( )(
M =
) − M
(
( °
)
=
)
1400 N
0
24.
REASONING AND SOLUTION a. The net torque about an axis through the point of contact between the floor and her shoes is
Σ τ = − (5.00 × 10
2
N)(1.10 m)sin 30.0° + F
N
(cos 30.0°)(1.50 m) = 0
F
N
= 212 N b. Newton's second law applied in the horizontal direction gives F h
− F
N
= 0, so
F h
= 212 N .
c. Newton's second law in the vertical direction gives F v
− W = 0, so F v
= × .
60.
REASONING AND SOLUTION After the mass has moved inward to its final path the centripetal force acting on it is T = 105 N. r
105 N
Its centripetal acceleration is a c = v
2
/ R = T / m
Now v = ω R so R = T/( ω
2 m )
The centripetal force is parallel to the line of action (the string), so the force produces no torque on the object. Hence, angular momentum is conserved.
I ω = I o
ω o
so that ω = ( I o
/ I ) ω o
= ( R o
2
/ R
2
) ω o
Substituting and simplifying
R
3
= ( mR o
4
ω o
2
)/ T , so that R = 0.573 m
68.
REASONING If we assume that the system is in equilibrium, we know that the vector sum of all the forces, as well as the vector sum of all the torques, that act on the system must be zero.
The figure below shows a free body diagram for the boom. Since the boom is assumed to be uniform, its weight W
B
is located at its center of gravity, which coincides with its geometrical center. There is a tension T in the cable that acts at an angle θ to the horizontal, as shown. At the hinge pin P , there are two forces acting. The vertical force V that acts on the end of the boom prevents the boom from falling down. The horizontal force H that also acts at the hinge pin prevents the boom from sliding to the left. The weight W
L
of the wrecking ball (the "load") acts at the end of the boom.
T
θ = 32°
φ – θ
W
L
V
W
B
θ = 32°
φ = 48°
P
H
By applying the equilibrium conditions to the boom, we can determine the desired forces.
SOLUTION The directions upward and to the right will be taken as the positive directions.
In the x direction we have while in the y direction we have
∑
F x
= H − T cos θ = 0 (1)
∑
F y
= V − T sin θ − W
L
− W
B
= 0 (2)
Equations (1) and (2) give us two equations in three unknown. We must, therefore, find a third equation that can be used to determine one of the unknowns. We can get the third equation from the torque equation.
In order to write the torque equation, we must first pick an axis of rotation and determine the lever arms for the forces involved. Since both V and H are unknown, we can eliminate them
from the torque equation by picking the rotation axis through the point P (then both V and H have zero lever arms). If we let the boom have a length L , then the lever arm for W
L
φ , while the lever arm for W
B
L φ . From the figure, we see that the lever arm for T φ θ . If we take counterclockwise torques as positive, then the torque equation is
∑ τ = − W
B
L cos φ
2
−
Solving for T , we have cos φ + TL sin ( φ − θ ) = 0
T =
1
2
W
B
+ W
L cos φ (3) a. From Equation (3) the tension in the support cable is
T =
1
2
(3600 N) + 4800 N cos 48 ° = × b. The force exerted on the lower end of the hinge at the point P is the vector sum of the forces H and V . According to Equation (1),
H = T cos θ =
(
×
)
° = × and, from Equation (2)
V = W
L
+ W
B
+ T sin θ = + +
(
×
)
° = ×
Since the forces H and V are at right angles to each other, the magnitude of their vector sum can be found from the Pythagorean theorem:
F
P
= H
2
+ V
2
= ×
2
+ ×
2
= ×