europa.doc
advertisement

Europa Orbiter Mission
Aleksandr Arustamyan
ASEN 5050 – Space Flight Dynamics
Research Paper
Abstract
The primary objective of this paper was to reduce time of the Europa Orbiter mission. We will
first introduce the entire trajectory proposed by NASA/JPL from Earth to Europa. Then, the
insertion of the orbiter into Europa’s orbit will be considered and a different option will be
proposed.
In the original design, it would take a little less than 3 years to reach Jupiter. Then, complicated
orbital maneuvers are to take place in the Jupiter’s sphere of influence, which will take 2.8 – 3.8
more years. In this paper we propose to remove the maneuvers and go directly into the 200-km
altitude orbit about Europa with gravity assist of two largest moons of Jupiter: Callisto and
Ganymede. Velocity changes could be applied at closest approaches to the two moons; however,
these were proven to be inefficient.
For simplicity of the analysis the major assumptions were that the orbits of Earth and Jupiter
about the Sun and the orbits of Jupiter moons are circular and co-planar. Relative positions of
Jupiter moons were not considered – it was assumed that at any point in time we could get a
desired orientation of the moons relative to each other.
Going directly into the 200-km altitude orbit about Europa would require change in velocity of
5.4243 km/s. The next consideration was to flyby in front of the two moons of Jupiter. This way
we reduced probe’s velocity on the approach to Europa, and change in velocity needed was
calculated to be 4.8749 km/s.
Introduction
NASA’s Galileo spacecraft has sent back to Earth detailed images of the surface of Europa,
fourth largest satellite of Jupiter. Many scientists believe that the pictures reveal a relatively
young surface of ice, possibly only about 1 kilometer thick in places. Internal heating on Europa
due to Jupiter’s tidal pull could melt the underside of the icepack, forming an ocean of liquid
water underneath the surface.
Europa, thus, has gained the rank of one of the highest priority targets for an outer Solar System
exploration mission. If liquid water were to exist on Europa, we could speculate on the existence
of life there. Life on Earth has been discovered at great ocean depths, beyond the penetration of
sunlight, thriving on upwelling chemical nutrients from the interior of the planet.
The objective of Europa Orbiter, a NASA/JPL interplanetary mission to be launched in March of
2008, is to send a spacecraft to Europa to measure the thickness of the surface ice and to detect
an underlying liquid ocean if it exists.
Theory
Gravitations parameter of a planet can be determined from its mass by the following equation:
G(m msat ) Gm
where G 6.673x10 -20
(1)
km3
is the gravitational constant.
kg s 2
Velocity of a spacecraft in a circular orbit about a planet (with the gravitational parameter μ) at a
radius r can be determined from the following equation:
vcirc
r
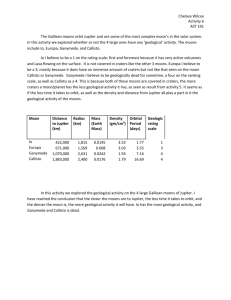
Figure 1 shows geometry of hyperbolic passage, which takes place when an object flybys
another object.
Figure 1: Geometry of hyperbolic passage
(2)
Essential parameters:
rp – radial distance of closest approach
δ – deflection angle of v∞.
The energy is constant whether the flyby object is at infinity or at the proximity of the other
object:
v2 v2
2 r
2
2a
(3)
where μ is the gravitational parameter of body B in Fig. 1. The other two useful equations with
the eccentricity parameter are:
1
sin
e
2
e 1
(4)
rp v
(5)
The next equation represents two-body equation of motion:
r r
r3
(6)
Table 1 summarizes given and calculated parameters for the planets considered in this paper.
Table 1: Characteristics of several planets
Distance
from planet
at focus,
km
Sun
Earth
Jupiter
Callisto
Ganymede
Europa
–
149598023
778298361
1883000
1070000
670900
Gravitational
parameter,
km3
s2
1.32712428e11
398600.4415
1.268e8
7186.82
9876.04
3203.04
Velocity
WRT planet
at focus,
km/s
Mass,
kg
Radius,
km
Not needed
29.784675
13.058183
8.206056
10.885985
13.747722
1.9891e30
5.9742e24
1.8988e27
1.077e23
1.48e23
4.8e22
Not needed
6378.1363
71492
2403
2634
1569
Problem of Interest
Let us talk about current plan of achieving a 200-km altitude circular orbit about Europa. It
consists of five orbital trajectories: Jupiter Direct, Jupiter Arrival, Jupiter Orbit Insertion, Tour,
and Endgame.
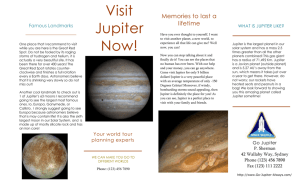
Jupiter Direct Trajectory
Figure 2: Jupiter Direct Trajectory
This is a direct trajectory to Jupiter with a plane maneuver. Since the orbital planes of the Earth
and the Jupiter about the Sun are not aligned, a plane maneuver will have to take place to transfer
the probe into the Jupiter’s orbital plane about the Sun. The best place for the maneuver (Broken
Plane Maneuver in Fig. 2) is on the intersection of the orbital planes of the Earth and the Jupiter.
Jupiter Arrival Geometry
Figure 3: Jupiter Arrival Geometry
(Note: the dates on this figure were calculated assuming a launch in 2006
which is not the currently planned launch date.)
After the planned launch of Europa Orbiter in March 2008, the probe will reach
Jupiter in less than 3 years. Then, it will make its first Ganymede flyby (G0) prior
to Jupiter orbit insertion (JOI).
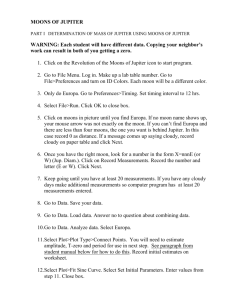
Jupiter Orbit Insertion
Figure 4: Jupiter Orbit Insertion
(Note: the dates on this figure were calculated assuming a launch in 2006
which is not the currently planned launch date.)
As soon as the probe enters the orbit around Jupiter, it will begin a Galileo-like tour of three of
the four largest Jovian satellites. A number of spacecraft maneuvers over the next 1.5 to 2 years
will place the spacecraft in orbit around Europa. PJR in Fig. 4 is Perijove Raise – a maneuver to
maintain an altitude above Jupiter to minimize time spent in the harsh radiation environment
nearer to Jupiter; and G1 is first Ganymede flyby after JOI.
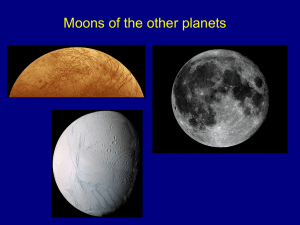
Tour
During the Galileo-like "Tour", the spacecraft will orbit Jupiter several times, using gravity
assists from Europa, Ganymede, and Callisto to "pump down" the orbit period from roughly 200
days to under 2 weeks. This will take nearly 1 to 1.5 years to accomplish. At the end of this
phase, the Europa “Endgame” begins.
Figure 5: Galileo-like tour
(Note: the dates on this figure were calculated assuming a launch in 2006
which is not the currently planned launch date.)
Endgame
Figure 6: Endgame
The "Endgame" trajectory uses gravity assists from Europa and spacecraft engine firings to
further "pump down" the spacecraft orbit from roughly a 2-week period to just over a 4-day
period. (Europa's orbit around Jupiter has a period of 3.55 days). This is done by "stepping
down" resonances. This phase can take 3-4 months to complete. Then, Jupiter's own gravity is
used to pull the spacecraft into a large elliptical orbit around Europa. A Europa Orbit Insertion
(EOI) maneuver is then used to circularize the orbit at 200-km altitude around Europa. This
begins the normal science phase of the Europa Orbiter mission, which will last 30 days.
It can be calculated that after the probe approaches Jupiter, it will be 2.8 – 3.8 more years before
the normal science phase begins.
Extension
The extension proposed here is to go directly to Europa as soon as the probe reaches Jupiter’s
sphere of influence. Let us calculate the velocity change required for the maneuver. We will first
consider going directly into the 200-km circular orbit about Europa. Then we will see how
gravity assists of two largest moons of Jupiter (Callisto and Ganymede) could be used to reduce
the required change in velocity.
For simplicity of the analysis we assume that the orbits of Earth and Jupiter about the Sun and
the orbits of Jupiter moons are circular and co-planar. Now we consider the patched conic
method for reaching Jupiter. Using the minimal energy Hohmann transfer, the semi-major axis of
the transfer is the average of Earth’s and Jupiter’s distance from the Sun. The velocity of the
probe at approach to Jupiter with respect to the Sun was calculated using equation (3) to be
7.4150 km/s. The velocity of the satellite with respect to Jupiter was calculated using Table 1 to
be: 5.6432 km/s.
Jupiter
Sun
Earth
Figure 7.a: Hohmann transfer trajectory
VJUP/SUN
VSAT/SUN
VSAT/JUP
Figure 7.b: Velocity of the satellite with respect to Jupiter (V-infinity = 5.643187 km/s)
Then we go into a hyperbolic passage trajectory with respect to Jupiter with closest approach to
it at Europa’s orbital radius.
∆
Jupiter
Europa’s orbit
Ganymede’s orbit
Callisto’s orbit
Figure 8: Closest approach to Jupiter at Europa’s orbital radius
Using equation (3) the velocity of the spacecraft at Europa’s orbital radius with respect to Jupiter
was calculated to be 20.2446 km/s, which with respect to Europa is 6.4969 km/s. At 200-km
altitude orbit about Europa (200-km altitude closest approach to Europa) the velocity of the
spacecraft will be 6.7699 km/s. The final velocity in the desired 200-km altitude circular orbit
about Europa has to be 1.3456 km/s. Thus, the change in velocity required is 5.4243 km/s.
Let us now consider hyperbolic passages by the two largest moons of Jupiter: Callisto and
Ganymede. Our main goal is to reduce the change in velocity required for achieving the 200-km
altitude about Europa. A Matlab code was created for this task (see Appendix). As initial input
we could specify approach distance away from Jupiter (∆ in Fig. 8). Then, we flyby Callisto at
200-km altitude closest approach either behind it (to achieve a desired deflection angle), or in
front of it in order to reduce probe’s velocity by gravity assist. We can apply an impulsive
velocity change at closest approach to the moon. Velocity change at this location will be most
effective. Afterwards, we use the two-body equation of motion (equation. (6)) and propagate
probe’s trajectory until it meets Ganymede’s orbit. Again we have the option to flyby the moon
in front and behind it, and also we can apply a velocity change on closest approach to the moon
(200-km altitude). The two-body propagation is used again until we reach Europa, where we
apply final velocity change to go into the 200-km altitude orbit. The output of the code gives
total velocity change used from the point of entering Jupiter’s sphere of influence.
Trying several cases, it was determined that velocity change at closest approach to Ganymede
was very ineffective compared to the velocity change at Callisto. Ganymede flyby was most
efficient when the probe passed in front of the moon to reduce probe’s velocity with respect to
Jupiter. After trying more cases, an optimal solution was found that would reduce calculated
earlier velocity change needed.
For best scenario found in such setup see Figure 9.
6
2
x 10
1.5
1
y [km]
0.5
0
-0.5
-1
-1.5
-2
-2
-1.5
-1
-0.5
0
x [km]
0.5
1
1.5
2
6
x 10
Figure 9: Using gravity assist of Callisto and Ganymede to reduce velocity change required to put the
probe into 200-km orbit about Europa.
The probe should reach Callisto’s orbit with ∆ = 1153300 km. This distance was adjusted so that
the probe’s velocity is parallel to Europa’s velocity on final approach. When the satellite reaches
Callisto’s orbit, its velocity is VSAT@CAL/JUP = 12.9044 km/s assumed to be directed vertically
upward as can be seen in Fig. 9. The probe then flybys in front of Callisto to reduce its “vertical”
velocity relative to Jupiter. After the Callisto flyby the velocity of the spacecraft becomes:
(-0.3981i + 12.5590j) km/s. Then we numerically integrate probe’s path until it reaches
Ganymede’s orbit with the velocity (-4.4003i + 15.5127j) km/s. Now the probe flybys in front of
Ganymede and the velocity becomes: (-4.7532i + 14.9230j) km/s. Then we again numerically
integrate probe’s path until it reaches Europa’s orbit with the velocity magnitude of 19.6701
km/s (compare with 20.2446 km/s obtained earlier). Then we make a hyperbolic passage to
Europa with closest approach of 200-km altitude and initiate the 4.8749 km/s velocity change,
that will put the probe into the desired orbit about Europa (change of velocity reduction by
0.5494 km/s).
Thus, it was not necessary to apply any velocity changes on closest approach to Callisto or
Ganymede. Flyby in front of those moons reduced the velocity of the probe relative to Europa.
Summary and Conclusions
The extension to the problem of interest was to reach the 200-km altitude orbit about Europa as
early as possible. This way the duration of the mission will be reduced by the factor of two. For
simplicity of the analysis the major assumptions were that the orbits of Earth and Jupiter about
the Sun and the orbits of Jupiter moons are circular and co-planar. Relative positions of Jupiter
moons were not considered – it was assumed that at any point in time we could get a desired
orientation of the moons relative to each other.
Going directly into the desired orbit about Europa required change of probe’s velocity in the
proximity of Jupiter of 5.4243 km/s. Then flybys Jupiter’s largest moons (Callisto and
Ganymede) were considered with possible change in velocity applied at the closest approach to
the moons. It was determined that the velocity changes were not efficient until the final approach
to Europa. Gravity assist of the two Jupiter moons helped reduce the velocity of the probe on the
final approach to Europa. The change in velocity required was thus reduced by 0.5494 km/s,
which was a 10% reduction.
References
http://www.jpl.nasa.gov/ice_fire/trajectory.htm, December 17, 2001
http://www.jpl.nasa.gov/europaorbiter, December 17, 2001
http://www.jpl.nasa.gov/basics/bsf4-1.htm, December 17, 2001
ASEN 5050 Fall 2001, Class handout: Interplanetary Transfer and Hyperbolic Passage
David A. Vallado: Fundamentals of Astrodynamics and Applications, Second Edition, 2001
Appendix
(The Matlab code)
%
%
%
%
ASEN 5050
Fall 2001
Aleksandr Arustamyan
Research Project
clear
close all
% Defining parameters
% Naming used: vcaljup is velocity of Callisto with respect to Jupiter
vcaljup = 8.206055818584;
vganjup = 10.8859851597;
veurjup = 13.747721663843;
% Gravitational parameters
mucal = 7186.82;
mugan = 9876.04;
mueur = 3203.04;
mujup = 126800000;
% Radii of Jupiter moons and their location away from Jupiter
rcal = 4806/2;
rgan = 5268/2;
reur = 3138/2;
rcaljup = 1883000;
rganjup = 1070000;
reurjup = 670900;
% Altitude of closest approach to Callisto and Ganymede
alt = 200;
% Drawing the orbits of the three moons of Jupiter:
% Callisto, Ganymede and Europa
figure(1);
x1 = -1883000:100:1883000;
y1 = sqrt(1883000^2 - x1.^2);
y11 = -y1;
plot(x1,y1,'-');
hold on;
plot(x1,y11,'-');
hold on;
x2 = -1070000:100:1070000;
y2 = sqrt(1070000^2 - x2.^2);
y22 = -y2;
plot(x2,y2,'-');
hold on;
plot(x2,y22,'-');
hold on;
x3 = -670900:100:670900;
y3 = sqrt(670900^2 - x3.^2);
y33 = -y3;
plot(x3,y3,'-');
hold on;
plot(x3,y33,'-');
xlabel('x [km]');
ylabel('y [km]');
%legend('Gravity assist of Callisto & Ganymede to get an orbit about Europa')
x_jup = 1153300;
angle_cal = asin(x_jup/rcaljup);
rsatjup = [x_jup -rcaljup*cos(angle_cal) 0];
vxcaljup = vcaljup*cos(angle_cal);
vycaljup = vcaljup*sin(angle_cal);
%vysatjup = 5.6431866278795;
vysatjup = 12.90442790334;
vxsatcal = -vxcaljup;
vysatcal = vysatjup - vycaljup;
%position of sat wrt Jupiter
%velocity of Callisto wrt Jupiter
%v infinity of satellite wrt Jupiter
%vsat at Callisto's distance from Jupiter
%vx infinity of satellite wrt Callisto
%vy infinity of satellite wrt Callisto
%satillite approach angle wrt Callisto
angle_sat_cal = -atan(vysatcal/vxsatcal);
%v infinity of satellite on approach to Callisto
vinf1_cal = sqrt(vysatcal^2+vxsatcal^2);
%vsat at closest approach to Callisto
v200pc = sqrt(vinf1_cal^2 + 2*mucal/(alt+rcal));
e1_cal = 1 + (alt + rcal)*vinf1_cal^2/mucal;
% half of deflection angle on approach to Callisto
halfangle1_cal = asin(1/e1_cal);
%%%%% DELTA V to be applied at closest approach to Callisto %%%%%
deltav_cal = 0;
v200pc = v200pc - deltav_cal;
%vinf of satellite on leaving Callitso
vinf2_cal = sqrt(v200pc^2-2*mucal/(alt + rcal));
e2_cal = 1 + (alt + rcal)*vinf2_cal^2/mucal;
% half of deflection angle on leaving Callisto
halfangle2_cal = asin(1/e2_cal);
%total deflection angle at Callisto
total_defangle_cal = halfangle1_cal + halfangle2_cal;
%%%%%%% Use negative sign if the probe flybys IN FRONT of Callisto
%%%%%%% Use positive sign if the probe flybys BEHIND Callisto
angle_sat2_cal = angle_sat_cal - total_defangle_cal;
% Velocity of the probe on leaving Callisto
velx = -vinf2_cal*cos(angle_sat2_cal) + vxcaljup;
vely = vinf2_cal*sin(angle_sat2_cal) + vycaljup;
vsatjup = [velx vely 0];
deltat = 100;
t = 0;
% Two body propagation untill Ganymede's orbit is reached
while ((norm(rsatjup) > rganjup) & (t < 300000))
hold on;
plot(rsatjup(1), rsatjup(2), '.');
rjup_temp = rsatjup;
vjup_temp = vsatjup;
rsatjup = [(rjup_temp(1)+vsatjup(1)*deltat)
(rjup_temp(2)+vsatjup(2)*deltat) 0];
vsatjup = [(vjup_temp(1)+(mujup*rjup_temp(1)/((norm(rjup_temp))^3))*deltat) ...
(vjup_temp(2)+(-mujup*rjup_temp(2)/((norm(rjup_temp))^3))*deltat)
0];
t = t + deltat;
end
angle_gan = asin(rsatjup(1)/rganjup);
vxganjup = vganjup*cos(angle_gan);
vyganjup = vganjup*sin(angle_gan);
%velocity of Ganymede wrt Jupiter
vxsatgan = vjup_temp(1) - vxganjup; %vx infinity of satellite wrt Ganymede
vysatgan = vjup_temp(2) - vyganjup; %vy infinity of satellite wrt Ganymede
angle_sat_gan = -atan(vysatgan/vxsatgan); %sat approach angle wrt Ganymede
% V infinity of satellite wrt to Ganymede
vinf1_gan = sqrt(vxsatgan^2 + vysatgan^2);
% Velocity at closest approach to Ganymede
v200pg = sqrt(vinf1_gan^2 + 2*mugan/(alt+rgan));
e1_gan = 1 + (alt + rgan)*vinf1_gan^2/mugan;
% half of deflection angle on approach to Ganymede
halfangle1_gan = asin(1/e1_gan);
%%%%%%% DELTA V to be applied at closest approach to Ganymede %%%%%%%%
deltav_gan = 0;
v200pg = v200pg - deltav_gan;
%v infinity of satellite on leaving Ganymede
vinf2_gan = sqrt(v200pg^2-2*mugan/(alt + rgan));
e2_gan = 1 + (alt + rgan)*vinf2_gan^2/mugan;
% half of deflection angle on leaving Ganymede
halfangle2_gan = asin(1/e2_gan);
total_defangle_gan = halfangle1_gan + halfangle2_gan;
%%%%%%% Use negative sign if the probe flybys IN FRONT of Callisto
%%%%%%% Use positive sign if the probe flybys BEHIND Callisto
angle_sat2_gan = angle_sat_gan - total_defangle_gan;
velx = -vinf2_gan*cos(angle_sat2_gan) + vxganjup;
vely = vinf2_gan*sin(angle_sat2_gan) + vyganjup;
vsatjup = [velx vely 0];
deltat2 = 100;
% Two body propagation untill Europa's orbit is reached
while ((t < 400000) & (norm(rsatjup) > reurjup))
rjup_temp = rsatjup;
vjup_temp = vsatjup;
rsatjup = [(rjup_temp(1)+vsatjup(1)*deltat)
(rjup_temp(2)+vsatjup(2)*deltat) 0];
vsatjup = [(vjup_temp(1)+(mujup*rjup_temp(1)/((norm(rjup_temp))^3))*deltat) ...
(vjup_temp(2)+(-mujup*rjup_temp(2)/((norm(rjup_temp))^3))*deltat)
0];
hold on;
plot(rsatjup(1), rsatjup(2), '.');
t = t + deltat2;
end
%Final calculations:
norm(vsatjup);
vsateur = norm(vsatjup) - veurjup;
v200pe = sqrt(vsateur^2 + 2*mueur/(alt+reur));
deltav_200p_eur = v200pe - sqrt(mueur/(alt+reur));
% Total delta V required:
total_deltav = abs(deltav_200p_eur) + abs(deltav_cal) + abs(deltav_gan)