Parachutes
advertisement

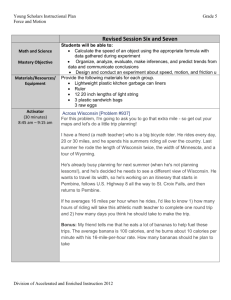
Propulsion Jon Edwards Parachutes For the supersonic portion of the descent after Mach 3 is reached, hemisflo ribbon parachutes will be deployed to slow the vehicle down to Mach 1. Hemisflo ribbon parachutes are used since according to Knacke they prove to be the most practical for velocities up to Mach 3 (Knacke, 5-99). After the vehicle reaches Mach 1, the hemisflo ribbon parachutes are cut and reefed ringsail parachutes are deployed. After a certain amount of time the reefing lines are cut and the parachutes are allowed to expand to their full area. Ringsail parachutes are being used due to their historically proven success rate. Ringsail parachutes were used successfully for the Mercury, Gemini, and Apollo spacecraft as the main descent parachutes. The Spring 2001 AAE450 class decided upon a retro rocket final descent stage in order to slow the vehicle down to an appropriate landing speed and to steer to the desired landing spot. However this induced a very large V. Instead of using a retro rocket we have decided that a maneuverable parachute such as a parafoil could be used to create some lift so that the vehicle could be slowed down and steered to the desired landing spot. However the code to simulate this is as of yet unwritten. Parachute Code The code which calculates the descent stage of the vehicle after Mach 3 is reached in the Martian atmosphere was written by Jeremy Davis for the Spring 2001 AAE 450 class and modified by Jon Edwards for the Fall 2001 AAE 450 class. The code consists of six Matlab files. Their filenames and purposes are as follows: subreefeom.m / supereom.m The subreefeom.m function solves the ordinary differential equations of the vehicle during the subsonic stages of the descent. The supereom.m function is identical to the subsonic solver except it uses a different drag coefficient and parachute surface area. The equations of motion that these functions utilize come directly from Newton’s second law of motion (F = m*a). In the y direction the equation of motion is as follows: Drag of parachutes = dragsub Mass of spacecraft = msc Acceleration = xdot(4) Velocity = v Velocity in y direction = x(4) Flight Path Angle = theta -cos(theta) * dragsub – msc * 3.7 = msc * xdot(4) cos(theta) = x(4) / v -x(4) *dragsub / v – msc * 3.7 = msc * xdot(4) xdot(4) = -(dragsub*x(4))/(v*msc) – 3.7 The eom’s in the x direction are identical to the ones in the y direction except there is no gravity term. superdiam.m / subreefdiam.m These functions calculate and return all the variables that the supersubhm.m function needs to calculate the trajectory during the supersonic and subsonic parts of the descent. Most of the variables are self-explanatory and most of the functions are taken from the Knacke parachute book. The source of each equation is explained in the codes. supersubhm.m This is the main body of the code where the descent is simulated. The descent is broken up into 3 stages. The first part is the supersonic portion of the descent in which the hemisflo ribbon parachutes are deployed. After mach 1 is reached the hemisflo chutes are cut and the ringsail chutes are deployed with a reefing line keeping the area of the chute well below the full expansion area. In the last part of the code, the reefing line is cut and the ringsail chutes are allowed to expand to their entire area. The velocity, acceleration, and position histories of each section are stuck together to complete the descent simulation. acceldiff.m This code is used by the main code to numerically differentiate the velocity vectors in order to obtain the acceleration history of the vehicle. Sample Case Since the trajectory code is not yet complete the sample case had to be ran with estimates for most of the variables. In this sample case the altitude where Mach 3 is reached is estimated to be around 17.5 km. This is where the Spring 2001 class got their vehicle to reach Mach 3. The flight path angle is estimated to be 45 deg and the vehicle mass is 57520 kg. For the supersonic stage of the descent, 7 hemisflo ribbon parachutes are used each with a diameter of 25 m. The total mass of the supersonic parachutes is 278 kg and the deployment time till Mach 1 is reached is 42 s. Once Mach 1 is reached the reefed ringsail parachutes are deployed and reefed for 10 seconds with a reefing factor of 0.3. Then the reefing lines are cut and the 3 ringsail parachutes are allowed to open to their full diameter of 38.5 m. The total deployment time of the unreefed ringsail parachutes is 39 seconds at which time the vehicle lands on the ground with a velocity of 55.7 m/s (much to fast but this is just a sample case). Figure 1 shows the altitude history as a function of time. Figure 2 shows the velocity history and Figure 3 shows the g loading as a function of time. Figure 1: Altitude History - Sample Case 18000 16000 14000 Altitude [meters] 12000 10000 8000 6000 4000 2000 0 -2000 0 10 20 30 40 50 60 Time [sec] 70 80 90 100 Figure 2: Velocity History - Sample Case 700 600 Velocity [m/s] 500 400 300 200 100 0 0 10 20 30 40 50 60 Time [sec] 70 80 90 100 80 90 100 Figure 3: G Loading - Sample Case 2.5 2 Gload 1.5 1 0.5 0 0 10 20 30 40 50 60 Time [sec] 70 One can easily see that the in this sample case the vehicle is landing much to fast. This will be corrected when the maneuverable parafoil stage is coded. Propulsion System Besides the nuclear thermal rocket which will put the vehicle into its interplanetary trajectory, the vehicle must have some sort of retro/boost engine to make an entry angle change and to do apogee burns in order to raise/lower the periapsis so that the vehicle will aerobrake effectively. There were a few prerequisites to this design: (1) We wanted something that was historically proven to be reliable (2) It must work off of hypergolic non-cryogenic propellants (3) It must provide > 5000 lbf of thrust Once these conditions were realized the Shuttle OMS Engine was decided upon. The OMS engine will provide 6000 lbf of thrust with an Isp of 313 s. The propellants are nitrogen tetroxide (NTO, oxidizer) and monomethyl-hydrazine (MMH, fuel). Both of which are non-cryogenic. The OMS engine is also reusable and reliable, with success on over 100 missions, 1000 starts and 15 hours of burning time. For the RCS system the same prerequisites were effective, except that we wanted the thrust to be greater than 500 lbf. The Marquardt R-40A RCS engine was developed for the shuttle orbiter reaction control system and has proven to be a reliable engine. 24 R-40A’s will be used with 8 in each plane to make up the RCS system. Engine Tank Sizing The engine tank sizing code (tanksize.m) was originally written by Casey Kirchner for the Spring 2001 class. The main differences between the original code, and the code as it appears now is that there is no retro burn during the descent to the Martian surface, there is no hovering maneuver near the surface, and there is no heat shield to worry about. In order to use the code without making drastic changes only a few things needed to be changed. The ΔVs for the descent and hovering burns were set to zero. This makes the mass fraction for these burns zero and therefore no propellant mass is taken into effect for these maneuvers. The mass of the heat shield was also set to zero to eliminate any effect that it might have had on the sizing calculations. A few other things needed to be changed including the RCS and OMS Isp’s, the OMS expansion ratio, the landing mass, and the vehicle dimensions. Sample Case For the sample case a landing mass of 57520 kg was used along with a V of 20 m/s for perigee raising/lowering. The HAB length and diameter was programmed to be 16.5 m and 13 m respectively. With this information the following output was given: Delta V Budget, m/s Landing DV: Hovering DV: Mars Orbit DV: Spin-up DV, tether deployed: Spin-up DV, tether not deployed: Enroute RCS/Maneuvering DV: Total DV: 0.00 0.00 20.00 62.00 121.34 102.00 305.34 Masses Descent Engine mass (kg): RCS Engine mass (x10) (kg): Oxidizer tank masses (kg): Fuel tank masses (kg): Pressurant tank masses (kg): Struct. support mass (kg): Stage inert mass (kg): Oxidizer masses (kg): Fuel masses (kg): Pressurant masses (kg): Total prop masses (kg): Total stage masses (kg): Tank and Engine Geometry Retro Engine: Retro Engine Throat: RCS Engines on Hab (each): RCS Engines on NTR (each): Oxidizer tank on Hab: Fuel tank on Hab: Oxidizer tank on NTR: Fuel tank on NTR: Pressurant tank on Hab: Pressurant tank on NTR: Hab Subsystem 0.00 15.44 10.78 11.00 4.70 4.19 46.11 NTR Subsystem 0.00 13.11 12.35 12.62 5.33 4.34 47.74 1725.03 1078.14 6.07 2809.24 2855.35 2059.03 1286.89 6.88 3352.80 3400.54 Length (m) 3.28 N/A 1.76 0.33 0.90 0.94 1.20 1.26 Spherical Spherical Total 0.00 28.55 23.12 23.62 10.03 8.53 93.85 3784.05 2365.03 12.95 6162.04 6255.89 Diameter (m) 1.81 0.03 1.10 0.15 1.00 1.00 1.00 1.00 1.36 1.44 We are not necessarily concerned with the NTR Subsystem information, only the Hab subsystem. The main reason why this code was used mostly unmodified from the original version is that the engine tanks must be big enough to allot space for the propellants needed to spin up the vehicle at the beginning of the interplanetary trajectory and the enroute RCS maneuvering V, which this code takes into account. We (the Fall 2001 class) are not responsible per the RFP to do these calculations or worry about the nuclear thermal rocket and tether systems therefore most of the data needed to calculate the tank sizes are assumed to be correct while only a small portion of the it was modified. Figure 4: Delta V Mass Breakdown of Mars Trip - Sample Case 64 63 Mass (Tonnes) 62 61 60 59 58 57 1 Earth Departure 2 3 S p i n - u p 4 RCS 5 6 Mars Orbit 7 Hover Land References 1Henry, Gary N., Humble, Ronald W., and Larson, Wiley J., “Space Propulsion Analysis and Design,” McGraw-Hill, Inc., 1995, pp.1-30, 179-294. 2Sutton, George P., “Rocket Propulsion Elements,” John Wiley & Sons, Inc., New York, NY, 1949, pp.22-36, 188. 3Knacke, T.W., “Parachute Recovery Systems: Design Manual”, Para Publishing, Santa Barbara, CA, 1992.