ES205TopicSummary.doc - Rose
advertisement

ES205 Analysis and Design of Engineering Systems:
Modeling-- We modeled systems using ideal elements and then applied basic principles
to obtain governing differential equations.
Analysis-- We solved the governing equations to gain insight that can be used in
designing systems.
-- Exact solutions
-- Numerical solutions (Simulink and Matlab)
-- Design Space
-- Other domains
-- s-domain
-- frequency domain
Design:
-- Worked in teams
-- Oral presentations
-- Peer evaluations
-- Report writing
Lecture Topics:
Modeling:
1) Mechanical Systems
2) Electrical Systems
3) Electromechanical Systems
4) Thermal Systems
5) Fluid Systems
6) Hydraulic Systems
7) Model Forms and Notation
Analysis:
1) Numerical Solutions
2) First Order Systems
3) Second Order Systems
4) Frequency Response Plots (Bode Diagrams)
1) Mechanical Systems
a) system elements such as mass, spring, and dampers
b) springs in series/parallel
c) gears
d) translational and rotational systems
Spring:
x1
x2
F
F
keq
F
c
Damper:
Fdamper c(v2 v1 )
Feq keq ( x2 x1 )
Spring in Series:
Springs in Parallel:
k1
keq
v2(t)
v1(t)
F
k1
k3
k2
1
1 1 1
k1 k2 k3
k2
k3
keq k1 k2 k3
Gears:
R2 D2 1 1 1 C2 N 2 T2
R1 D1 2 2 2 C1 N1 T1
N1
N2
θ1
R1
f(t)
Translational System:
x(t)
m
k
c
f(t)
F ma
T J
J Tk TB T J
J B K T
J B K T
θ
T
a
cv
R2
s1
s2
Rotational System:
T
kθ
Fk Fc f (t ) ma
ma cv kx f (t )
mx cx kx f (t )
m
kx
B
θ2
kθ θ
Bω
α
J
2) Electrical Systems
a) Resistance, Capacitance, Inductance
b) Complex Impedance
c) Complex Impedance in series and parallel
d) RLC circuits
e) Op Amps (two rules)
Resistor:
i
vB
vA
Capacitor:
time domain
s domain
va - vb = i R
Va -Vb = I R
Impedance:
ZR = R
R
i
vA
i = C
vB
d (va vb )
dt
I =
1
(VA VB )
Cs
ZC =
1
Cs
C
i
Coil:
vA
vB
va - vb = L
di
dt
Va - Vb = Ls I
ZL = L s
L
Impedance in Series:
Impedance in Parallel:
Z2
Z1
Z3
Zeq =
Zeq = Z1 + Z2 + Z3
1
1
1
1
Z1 Z 2 Z 3
Example RCL circuit:
i1
i2
(Eq 1)
Vi -Vo = I1 R
(Eq 2)
1
(Vo 0) (Eq 3)
Cs
Vo - 0 = Ls I3
Z3
(Eq 4)
In
Rule 1:
vo
I1 - I2 - I3 = 0
I2 =
Z2
Op Amp Rules: if feedback
R
vi(t)
Z1
Vn V p 0
i3
C
L
Vn
-
+
Vp
Rule 2:
Ip
In I p 0
Common Op Amp Circuit:
Vo Z 2
Vi
Z1
Vi
Z2
Z1
+
Vo
3) ElectricalMechanical systems
a) DC Motors--armature controlled
b) DC Motors-- field controlled
b) Combination systems
Armature Controlled DC Motor
RA
vin
Field Controlled DC Motor:
RA
LA
if
Rf
iA
iA
vb
+
-
KE,KT
θM, ωM
+
if
vin
Lf
KE,KT
vb
Td
Mathematical Models:
Armature Control Motor Model:
Electrical Model
di
vin iA RA LA A vb 0 (Eq 1)
dt
vb K E
(Eq 2)
J, c
Field Control Motor Model:
Electrical Model
vin i f R f L f
vA iA RA LA
and
Mechanical Model
d
T c Td J
dt
and
T KT i A
θM, ωM
-
Td
J, c
and
LA
di f
0
(Eq 1)
diA
vb 0
dt
(Eq 2)
dt
vb K E i f
Mechanical Model
(Eq 3)
(Eq 4)
vin = control voltage
iA = armature current
T = motor torque
J = motor inertia
ω= speed of motor
RA = Armature Resistance
LA = Armature inductance
KE = motor back EMF constant
T c Td J
and
d
dt
T KT i f iA
vb = motor back emf
if = field current
Td = disturbance torque on shaft
c = motor damping constant
Rf = field resistance
Lf = field inductance
KT = motor torque constant
(Eq 3)
(Eq 4)
(Eq 5)
4) Thermal Systems
a) Conduction, Convection, Radiation
b) Lumped Capacitance
c) Biot Number
Conduction:
T T
L
Q k High Low where Rk
Rk
kA
where k is the thermal conductivity
Lumped Thermal Storage System:
.
Qin
.
Usys
.
Convection:
T T
1
Q h W all Stream
where
Rh
Rh
hc A
where hc is the convection coefficient
Qout
Win
from Conservation of Energy:
dU sys
Radiation:
dt
Win Qin Qout
Q h A (T14 T24 )
where σ is the Stefan-Boltzman constant
and ε is the emissivity
or
mc
dTsys
dt
Win Qin Qout
Test for Valid Lumped Thermal System:
If
Bi < 0.1 , then the system may be treated as a lumped thermal system.
h V
where Bi
k As
Typical Lumped Thermal System Problem:
Tfluid
dT
mc
hA(T T fluid )
dt
cV dT
hA dt
T T fluid
T
Rconv
Q
hc
Model:
.
Cth = m c
T
m
Tfluid
.
Q
5) Fluid Systems
a) Tank draining problems
Continuity Equation:
Bernoulli's Equation with External Work Term:
vi2
ve2
m
p
g
z
W
m
p
g
z
i
net
,
in
e
i
i
i
e
e
e
2
2
in
out
m V =ρvA
Conservation of mass:
dmsys
mi me
dt
in
out
Static fluid pressure:
or
dVsys
dt
V i V e
in
out
Discharge coefficient relationship:
p gh
V exit = Ae Cd 2 g (h hexit )
.
Tank Draining:
dh
Asurf
Vi Ve
dt
dh
Asurf
V i Aexit Cd 2 g (h hexit )
dt
Vi
.
h
Ve
Aexit
6) Hydraulics:
Spool Valve:
hexit
Piston:
.
V = Kv x
V
Ai
A
x
dy
V
dt
.
V
System
Kv
y
.
V
L1
L2
Lever:
yx zx
zy
L1
L2
L1 L2
z
x
y
7) Model forms and notation:
a) Block and simulation diagrams
b) ODEs
c) Transfer functions
d) State space
e) Input-Output
Simulation Diagram:
f
+
-
1
KA
..
.
x
x
1
s
m
1
s
x
KB
KC
DE Model (2nd order equation):
d 2x
dx
K A 2 K B KC x f
dt
dt
K A x K B x KC x f
or
DE Model (Set of 1st order equation):
dx
v
dt
dv
1
f K Bv KC x
dt K A
or
xv
v
1
f K Bv KC x
KA
State Space Form:
0
x
KC
v K
A
1
0
x
K B 1 f
v
K A K A
x
{ y} [C ] [ D]{ f }
v
Transfer Function:
X ( s)
1
F (s) K A s 2 K B s KC
Input/Output:
F(s)
1
K A s K B s KC
2
X(s)
Analysis:
1) Numerical solutions (Simulink, Matlab, and Maple)
1st Order Standard Form:
2) First Order Systems
a)
b)
c)
d)
e)
Standard form
Free response
Step response
Harmonic response
System identification
and parameter estimation
Free Response:
dx
x K f (t )
dt
where τ = time constant
K = static gain
Xo
f (t) = 0
63
%
of
Xo
Settling Time:
T2% Settling 4
T1% Settling 5
86
%
of
Xo
95
%
of
Xo
t
0
t=τ
t = 2τ
t = 3τ
86%
95%
Step Response: f (t) = A u(t)
Response
initial slope = 1 KA
Settling Time:
T2% Settling 4
KA uo
T1% Settling 5
Static Gain:
K
98%
63%
xss
t
A
t-to=0τ
t-to = 1τ
t-to= 3τ
t-to= 2τ
t-to =4τ
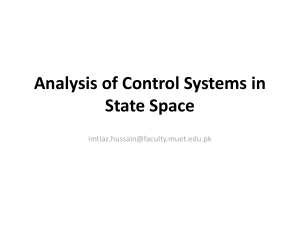
Harmonic Response: where f (t) = A cos(ωf t) or A sin(ωf t)
Magnification factor:
A
K
MF o
Ai
1 ( f ) 2
1
Phase angle:
0.8
tan 1 ( f )
xss MF A cos( f t )
Ai
0.4
displacement [m]
Steady State Response:
0.6
Ao
0.2
0
-0.2
-0.4
-0.6
-0.8
Measured from Plot
f t (lag)
-1
0
2
4
6
8
10
time [s]
12
14
16
18
20
3) Second order systems
a) standard form
b) free response
c) step response
d) harmonic excitation
e) system identification and parameter estimation
Free Response:
f(t) = 0:
Overdamped solution:
x(t ) h C1e(
2 1)n t
C2 e (
2 1)n t
for 1
t
Underdamped solution:
x(t ) C e nt sin d t
for 1
t
Critically damped solution:
x(t ) ( A Bt ) e nt
Logarithmic decrement:
Damping ratio
d
2
Td
Undamped natural frequency
2 4 2
2% Settling Time:
Ts
t
Damped natural frequency
x
ln i
xi T
for 1
n d
1
1 2
1% Settling Time:
4
n
Ts
5
n
Second order systems...continued
Step Response: f(t) = A u(t)
1 d 2 x 2 dx
x K f (t )
n2 dt 2 n dt
Overdamped:
and
Critically Damped:
t
Underdamped:
t
Logarithmic decrement:
ln
Damped natural frequency
xi xss
xi T xss
d
Damping ratio
2
Td
Undamped natural frequency
n d
2 4 2
1
1 2
Steady State Response, xss or x∞ = K (static gain)
Rise Time, Trise:
Trise
d
where
tan
1
1 2
% Overshoot (%OS):
%OS 100e
2% Settling Time:
Ts
1
2
1% Settling Time:
4
n
Ts
5
n
Second order systems...continued
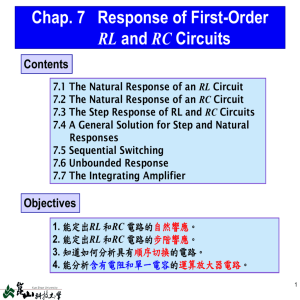
f(t) = A cos(ωf t + λ) or A sin(ωf t +λ)
Harmonic response:
1 d x 2 dx
x K f (t )
n2 dt 2 n dt
2
1
0.8
0.6
Ai
0.4
displacement [m]
n = undamped natural freq.
ζ = damping ratio
K = static gain
Ao
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
0
Steady-State response:
xSS (t ) MF A cos( f t )
or
2
4
Ao
Ai
8
10
time [s]
12
14
16
18
20
xSS (t ) MF A sin( f t )
Magnification factor:
MF
6
Output Phase angle:
2
2
(1 )
K
1
2 2
Normalized frequency
2
tan 1
2
Measured from Plot
f
n
f t
Phasor Notation:
C = a + i b = C eiθ
= C θ
where C = a b
and θ = tan-1(b/a)
2
2
N
Mulitple Harmonic Input Response:
f (t ) Ak cos( f k t )
k 1
xss (t ) MF1 A1 cos( f1 t 1 ) MF2 A2 cos( f2 t 2 ) ... MFN AN cos( f N t N )
or
xss (t )
where
N
MF A
k 1
MFk | TF (i fk ) |
k
k
cos( f k t k )
and
k TF (i fk )
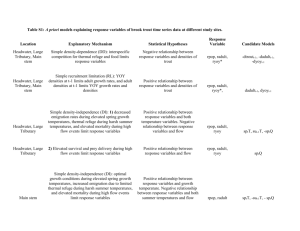
4) Frequency response plots (Bode Plots)
a) Read magnitude and phase to find steady state response
c) Interpreting Bode plots to find transfer function
d) Straight line asymptotic approximations system identification
e) Exact frequency analysis with Matlab and/or Maple
Term Type: TF:
Log Magnitude
Phase Angle
--------------------------------------------------------------------------------------------------------------------.
20 log10(K)
0o
Constant
K
for K>0
0o
Gain
0 db
-180o
for K<0
-------------------------------------------------------------------------------------------------------------------.
n= -2
40 db/dec
Pole/zero
sn
n=2
180o
log
(K)
10
20
db/dec
at
n= -1
ω =1
n=1
log10(K)
origin
90o
0 db
0o
-20 db/dec
n=1
log10(K)
n= -1
-90o
n= -2
-180o
n=2
-40 db/dec
----------------------------------------------------------------------------------------------------------------.
log10(K)
st
1 order Pole
ωbreak
0.1*ωbreak 10*ωbreak
not at origin
1
0 db
0o
s
1
-45 o/dec
-90o
break
-20 db/dec
log10(K)
1st order Zero
log10(K)
90o
+45 o/dec
+20 db/dec
not at origin
ωbreak
log10(K)
log10(K)
s
0o
1
break
0 db
10*ωbreak
0.1*ωbreak
-----------------------------------------------------------------------------------------------------------------.
2nd order Pole
1
0 db
1
2
2
s
s 1
break 2
break
ωbreak
0.1*ωbreak
0o
-90 o/dec
-40 db/dec
180o
+90 o/dec
+40 db/dec
log10(K)
log (K)
ωbreak 10
0 db
-180o
log10(K)
log10(K)
2nd order Zero
1
2
s2
s 1
2
break
break
10*ωbreak
0o
0.1*ωbreak
10*ωbreak