Riemannian median estimation and stochastic algorithms for
advertisement

Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Riemannian median estimation and
stochastic algorithms for computing
p-means of probability measures
Marc Arnaudon∗ , Le Yang∗ and Frédéric Barbaresco†
∗ LMA,
Université de Poitiers.
† Thales
Air Systems.
Matrix Information Geometries 2011, Palaiseau, France
Riemannian median and stochastic algorithms
1 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
1
2
3
4
5
Introduction and Background : Radar Target Detection
Radar observation values
Standard method
Geometric method
Geometry of Covariance Matrices
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian p -means
Framework
Denition
Characterization and robustness
Stochastic Algorithms
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Perspectives
Riemannian median and stochastic algorithms
2 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
1
2
3
4
5
Radar observation values
Standard method
Geometric method
Introduction and Background : Radar Target Detection
Radar observation values
Standard method
Geometric method
Geometry of Covariance Matrices
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian p -means
Framework
Denition
Characterization and robustness
Stochastic Algorithms
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Perspectives
Riemannian median and stochastic algorithms
3 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Emit −→ Reect −→ Receive
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Emit −→ Reect −→ Receive
Fig. 1: Emission
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Emit −→ Reect −→ Receive
Fig. 1: Reection
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Emit −→ Reect −→ Receive
Fig. 1: Reception
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Radar observation values
Fix a direction
Subdivide : radar cells
Emit −→ Reect −→ Receive
Observation value of one radar cell
Z
= (z1 , ..., zk = rk e i ϕk , ..., zn )T
rk : amplitude of reected signal
ϕk : phase of reected signal
n : number of signals emitted in one burst
Riemannian median and stochastic algorithms
4 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Standard method for target detection
Observation value of one radar cell : Z = (z , ..., zn )T
1
Riemannian median and stochastic algorithms
5 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Standard method for target detection
Observation value of one radar cell : Z = (z , ..., zn )T
1
Method using Fourier transform
Discrete Fourier transform
Riemannian median and stochastic algorithms
5 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Standard method for target detection
Observation value of one radar cell : Z = (z , ..., zn )T
1
Method using Fourier transform
Discrete Fourier transform
Identication of exeptional frequency behavior : Constant False
Alarm Rate (CFAR)
Riemannian median and stochastic algorithms
5 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Standard method for target detection
Observation value of one radar cell : Z = (z , ..., zn )T
1
Method using Fourier transform
Discrete Fourier transform
Identication of exeptional frequency behavior : Constant False
Alarm Rate (CFAR)
Riemannian median and stochastic algorithms
5 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Standard method for target detection
Observation value of one radar cell : Z = (z , ..., zn )T
1
Method using Fourier transform
Discrete Fourier transform
Identication of exeptional frequency behavior : Constant False
Alarm Rate (CFAR)
Limitation : n small (for example, n = 8 or 16)=⇒ low resolution
Riemannian median and stochastic algorithms
5 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Geometric Method for target detection
Statistical modeling hypothesis : Z = (z , ..., zn )T is a
realization of a centered stationary Gaussian process.
1
Riemannian median and stochastic algorithms
6 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Geometric Method for target detection
Statistical modeling hypothesis : Z = (z , ..., zn )T is a
realization of a centered stationary Gaussian process.
1
Covariance Matrix
Rn = E[zi zj ]
ij n
≤, ≤
1
Riemannian median and stochastic algorithms
r
r
r
r
0
1
= .
..
rn −
1
0
...
...
r n−
r n−
r
r
... ...
1
...
1
1
2
..
.
0
6 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Geometric Method for target detection
Statistical modeling hypothesis : Z = (z , ..., zn )T is a
realization of a centered stationary Gaussian process.
1
Covariance Matrix
Rn = E[zi zj ]
ij n
≤, ≤
1
r
r
r
r
0
1
= .
..
rn −
1
0
...
...
r n−
r n−
r
r
... ...
1
...
1
2
..
.
0
Rn ∈ THPDn : Toeplitz Hermitian positive denite
Riemannian median and stochastic algorithms
1
6 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Principle of target detection : geometric method
Observation value of one radar cell : Rn
Riemannian median and stochastic algorithms
7 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Principle of target detection : geometric method
Observation value of one radar cell : Rn
Riemannian median and stochastic algorithms
7 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Principle of target detection : geometric method
Observation value of one radar cell : Rn
To be precisely dened
Distance between two covariance matrices
Riemannian median and stochastic algorithms
7 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Radar observation values
Standard method
Geometric method
Principle of target detection : geometric method
Observation value of one radar cell : Rn
To be precisely dened
Distance between two covariance matrices
Average of covariance matrices
Riemannian median and stochastic algorithms
7 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
1
2
3
4
5
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Introduction and Background : Radar Target Detection
Radar observation values
Standard method
Geometric method
Geometry of Covariance Matrices
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian p -means
Framework
Denition
Characterization and robustness
Stochastic Algorithms
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Perspectives
Riemannian median and stochastic algorithms
8 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients by means of autoregressive model
Autoregressive model : zk + = ek + −
1
Riemannian median and stochastic algorithms
1
Pk
i = aik zk + −i
1
1
9 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients by means of autoregressive model
Autoregressive model : zk + = ek + −
Minimize prediction error : E[|ek + | ]
1
1
1
Riemannian median and stochastic algorithms
2
Pk
i = aik zk + −i
1
1
9 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients by means of autoregressive model
P
Autoregressive model : zk + = ek + − ki= aik zk + −i
Minimize prediction error : E[|ek + | ]
Optimal prediction coecients : (ak , ..., akk )
1
1
1
1
1
2
1
Riemannian median and stochastic algorithms
9 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients by means of autoregressive model
P
Autoregressive model : zk + = ek + − ki= aik zk + −i
Minimize prediction error : E[|ek + | ]
Optimal prediction coecients : (ak , ..., akk )
1
1
1
1
1
2
1
Denition
µk = akk ∈ D = {z ∈ C : |z | < 1}
is called the k-th reection coecient.
Riemannian median and stochastic algorithms
9 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients parametrization
Change of coordinates
ϕ:
THDPn −→ R∗+ × Dn− , Rn 7−→ (r
is a dieomorphism.
Riemannian median and stochastic algorithms
1
0
, µ1 , . . . , µn−1 )
10 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients parametrization
Change of coordinates
ϕ:
THDPn −→ R∗+ × Dn− , Rn 7−→ (r
1
is a dieomorphism.
0
, µ1 , . . . , µn−1 )
Computation of ϕ :
det Sk
2, . . . , k + 1
µk = (−1)k
, where Sk = Rk +
det Rk
1, . . . , k
1
Riemannian median and stochastic algorithms
10 / 34
.
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Reection coecients parametrization
Computation of ϕ− :
1
r
0
1
r
1
= −P0 µ1 ,
+ αkT−1 Jk −1 Rk−−11 αk −1 ,
Q
= P0 ik=−11 (1 − |µi |2 ),
rk = −µk Pk −
where Pk −
= P0 ,
1
r
αk −1 = ...
rk −
1
Riemannian median and stochastic algorithms
0 ... 0 1
0 . . . 1 0
.
=
1
2 ≤ k ≤ n − 1,
and Jk −
1
...
1 ... 0 0
11 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian metric and curvature of
THPDn
Kähler potential : Φ(Rn ) = − ln(det Rn ) − n ln(π e )
Riemannian median and stochastic algorithms
12 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian metric and curvature of
THPDn
Kähler potential : Φ(Rn ) = − ln(det Rn ) − n ln(π e )
Riemannian metric (F. Barbaresco, 2008)
dr
ds = n
r
2
0
2
0
1
(n − k )
k=
, . . . , µn− ) = ϕ(Rn ).
2
0
where (r , µ
+
n −1
X
1
|d µk |2
,
(1 − |µk |2 )2
1
Riemannian median and stochastic algorithms
12 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian metric and curvature of
THPDn
Kähler potential : Φ(Rn ) = − ln(det Rn ) − n ln(π e )
Riemannian metric (F. Barbaresco, 2008)
dr
ds = n
r
2
0
2
0
1
(n − k )
k=
, . . . , µn− ) = ϕ(Rn ).
2
0
where (r , µ
+
n −1
X
1
|d µk |2
,
(1 − |µk |2 )2
1
Curvature
THPDn is a Cartan-Hadamard manifold with −4 ≤ K ≤ 0.
Riemannian median and stochastic algorithms
12 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Riemannian distance of
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
THPDn
Riemannian distance
x = (P , µ
y = (Q , ν , . . . , νn− ). Then the
Riemannian distance between x and y is given by
/
n−
X
d (x , y ) = nσ(P , Q ) + (n − k )τ (µk , νk )
k=
1
, . . . , µn−1 ),
1
1
1
2
1 2
2
,
1
Q
where σ(P , Q ) = | ln( )| and
P
Riemannian median and stochastic algorithms
νk −µk
|
1 1 + | −µ̄
k νk .
τ (µk , νk ) = ln
k −µk |
2 1 − | ν−µ̄
ν
1
1
13 / 34
k k
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Geodesics of
Geodesics
x = (P , µ
1
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
THPDn
, . . . , µn−1 ),
v = (v , v
0
1
, . . . , vn−1 ) ∈ Tx . The geodesic
starting from x with velocity v is given by
ζ(t , x , v ) = (ζ0 (t ), ζ1 (t ), . . . , ζn−1 (t )),
where ζ (t ) = Pe P t and for 1 ≤ k ≤ n − 1,
v0
0
2|vk |t
ζk (t ) =
(µk + e i θk )e 1−|µk |2 + (µk − e i θk )
2|v |t
k
(1 + µ̄k e i θk )e 1−|µk |2
Riemannian median and stochastic algorithms
+ (1 − µ̄k e i θk )
,
θk = arg vk .
14 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
1
2
3
4
5
Framework
Denition
Characterization and robustness
Introduction and Background : Radar Target Detection
Radar observation values
Standard method
Geometric method
Geometry of Covariance Matrices
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian p -means
Framework
Denition
Characterization and robustness
Stochastic Algorithms
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Perspectives
Riemannian median and stochastic algorithms
15 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the framework
Let M be a Riemannian manifold with Riemannian distance ρ
and pinched sectional curvatures : −β ≤ Kσ ≤ α .
2
Riemannian median and stochastic algorithms
2
16 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the framework
Let M be a Riemannian manifold with Riemannian distance ρ
and pinched sectional curvatures : −β ≤ Kσ ≤ α .
Fix a geodesic ball B (a, r ) ⊂ M .
2
Riemannian median and stochastic algorithms
2
16 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the framework
Let M be a Riemannian manifold with Riemannian distance ρ
and pinched sectional curvatures : −β ≤ Kσ ≤ α .
Fix a geodesic ball B (a, r ) ⊂ M .
Let µ be a probability measure on M such that
supp µ ⊂ B (a, r ).
2
Riemannian median and stochastic algorithms
2
16 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the framework
Let M be a Riemannian manifold with Riemannian distance ρ
and pinched sectional curvatures : −β ≤ Kσ ≤ α .
Fix a geodesic ball B (a, r ) ⊂ M .
Let µ be a probability measure on M such that
supp µ ⊂ B (a, r ).
p ∈ [1, +∞).
2
Riemannian median and stochastic algorithms
2
16 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the framework
Let M be a Riemannian manifold with Riemannian distance ρ
and pinched sectional curvatures : −β ≤ Kσ ≤ α .
Fix a geodesic ball B (a, r ) ⊂ M .
Let µ be a probability measure on M such that
supp µ ⊂ B (a, r ).
p ∈ [1, +∞).
2
2
Assumption ∗
The support of µ is not reduced to one point. Either p > 1 or the
support of µ is not contained in a line, and the radius r satises
r < rα,p with
rα,p
rα,p
= 12 min inj(M ), 2πα if p ∈ [1, 2)
if p ∈ [2, ∞)
= 21 min inj(M ), απ
Riemannian median and stochastic algorithms
16 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the denition
Theorem (B. Afsari, 2010)
Under the Assumption ∗, the function
Hp : M −→ R+
x 7−→
Z
M
ρp (x , y )µ(dy )
has a unique minimizer ep in M , which is called the p -mean of µ.
Moreover ep ∈ B (a, r ).
Riemannian median and stochastic algorithms
17 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : the denition
Theorem (B. Afsari, 2010)
Under the Assumption ∗, the function
Hp : M −→ R+
x 7−→
Z
M
ρp (x , y )µ(dy )
has a unique minimizer ep in M , which is called the p -mean of µ.
Moreover ep ∈ B (a, r ).
Two important particular cases
p = 1 : e is the median of µ.
p = 2 : e is the mean (or barycenter, center of mass) of µ.
1
2
Riemannian median and stochastic algorithms
17 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : characterization and robustness
Characterization
p=1: x =e
Z
⇐⇒
− exp−
x 1 y µ(dy ) ≤ µ{x }.
ρ(x , y )
M \{x }
p > 1 : x = ep ⇐⇒ grad Hp (x ) = 0.
1
Riemannian median and stochastic algorithms
18 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : characterization and robustness
Characterization
p=1: x =e
Z
⇐⇒
− exp−
x 1 y µ(dy ) ≤ µ{x }.
ρ(x , y )
M \{x }
p > 1 : x = ep ⇐⇒ grad Hp (x ) = 0.
1
Robustness
p < q =⇒ ep is less sensitive to outliers than eq .
Riemannian median and stochastic algorithms
18 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Framework
Denition
Characterization and robustness
Riemannian p −means : characterization and robustness
Characterization
p=1: x =e
Z
⇐⇒
− exp−
x 1 y µ(dy ) ≤ µ{x }.
ρ(x , y )
M \{x }
p > 1 : x = ep ⇐⇒ grad Hp (x ) = 0.
1
Robustness
p < q =⇒ ep is less sensitive to outliers than eq .
The median e is the most robust in (ep )p≥ : in order to move
the median of a set of N points to innity, one should move at
least b(N + 1)/2c points in this set (Fletcher et al, 2009).
1
Riemannian median and stochastic algorithms
1
18 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
1
2
3
4
5
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Introduction and Background : Radar Target Detection
Radar observation values
Standard method
Geometric method
Geometry of Covariance Matrices
Reection coecients parametrization
Riemannian metric and curvature
Riemannian distance and geodesics
Riemannian p -means
Framework
Denition
Characterization and robustness
Stochastic Algorithms
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Perspectives
Riemannian median and stochastic algorithms
19 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Stochastic algorithms for computing p -means
Theorem 1 (M. Arnaudon et al, 2010)
Let (Pk )k ≥ be a sequence of independent B (a, r )-valued
random variables with law µ.
Let (tk )k ≥P⊂ (0, Cp,µ,r ] be a sequence
P∞ of positive numbers
satisfying ∞
t
=
+∞
and
k= k
k = tk < ∞.
Let x ∈ B (a, r ) and dene a random walk (Xk )k ≥ by
1
1
2
1
1
0
X
0
= x0 ;
0
Xk +
1
= expXk −tk +1 gradXk
Fp (·, Pk +
1
where Fp (x , y ) = ρp (x , y ) and gradx Fp (·, x ) = 0.
Then Xk −→ ep in L and a.s.
2
Riemannian median and stochastic algorithms
20 / 34
) ,
k ≥ 0;
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Example :
M = Rd
and
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
p=2
µ is a compactly supported probability measure on
Riemannian median and stochastic algorithms
21 / 34
Rd .
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Example :
M = Rd
and
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
p=2
µ is a compactly supported probability measure on
e
2
= E[P1 ].
Riemannian median and stochastic algorithms
21 / 34
Rd .
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Example :
M = Rd
and
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
p=2
µ is a compactly supported probability measure on
e
2
= E[P1 ].
Taking tk = k gives Xk = k
1
2
Riemannian median and stochastic algorithms
1
Pk
j = Pj .
1
21 / 34
Rd .
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Example :
M = Rd
and
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
p=2
µ is a compactly supported probability measure on
e
2
= E[P1 ].
Taking tk = k gives Xk = k
1
2
SLLN
Theorem 1 =⇒
1
Pk
j = Pj .
1
k
1X
P −→ E[P
k j= j
1
]
a.s .
1
Riemannian median and stochastic algorithms
21 / 34
Rd .
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Example :
M = Rd
and
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
p=2
µ is a compactly supported probability measure on
e
2
= E[P1 ].
Taking tk = k gives Xk = k
1
2
SLLN
Theorem 1 =⇒
1
Pk
Rd .
j = Pj .
1
k
1X
P −→ E[P
k j= j
1
]
a.s .
1
Nothing but the strong law of large numbers !
Riemannian median and stochastic algorithms
21 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
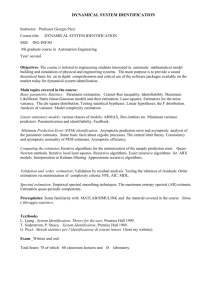
How does the algorithm work
A , A , A and A are data points, M is the p-mean of them.
1
2
3
4
Riemannian median and stochastic algorithms
22 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Simulating example 1
Median of the uniform measure on an equilateral triangle in the
plane.
Riemannian median and stochastic algorithms
23 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Simulating example 2
Median of the uniform measure on the unit square in the plane
Riemannian median and stochastic algorithms
24 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Simulating example 3
Median of a non uniform measure on [0, 4] × [0, 4] in the plane
4
3
2
1
0
0
1
Riemannian median and stochastic algorithms
2
3
4
25 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Simulating example 4
Median of Another non uniform measure on the unit square in the
plane.
2
1.5
1
0.5
1
0.5
0
0
-0.5
-0.5
-1
-2
-1.5
-2
-1.5
-1
-0.5
-1
-1
-0.5
0
0
0.5
-1.5
0.5
1
1
1.5
1.5
2 2
Riemannian median and stochastic algorithms
-2
-2
-1.5
-1
-0.5
0
26 / 34
0.5
1
1.5
2
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Simulating example 5 : Function
p 7−→ ep .
e∞
mean
4
median
3
2
1
Riemannian median and stochastic algorithms
27 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
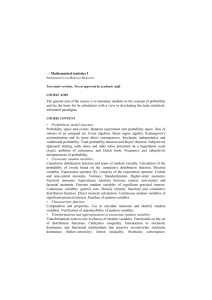
Simulating example 6 : convergence in nonconvex case
Median of a non uniform measure on the sphere S .
2
Riemannian median and stochastic algorithms
28 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Rate of convergence : a central limit theorem
Theorem 2 (M. Arnaudon et al, 2010)
Let (Xk )k ≥ be the time inhomogeneous M -valued Markov
chain dened in Theorem 1 with tk = min (δ/k , Cp,µ,r ) .
Dene for n ≥ 1 the rescaled Tep M -valued Markov chain
(Ykn )k ≥ by
0
0
k
Ykn = √ exp−ep Xk .
n
1
Assume that Hp is C in a neighborhood of ep and δ > Cp−,µ,r .
2
1
Then the sequence of processes Y[nnt ]
weakly converges
t≥
in D((0, ∞), Tep M ) to a diusion process (yδ (t ))t ≥ .
0
0
Riemannian median and stochastic algorithms
29 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Stochastic algorithms for computing p -means
Rate of convergence : a central limit theorem
Rate of convergence : a central limit theorem
Theorem 2 (M. Arnaudon et al, 2010)
Moreover, the diusion process (yδ (t ))t ≥ has the follwing
representation :
0
yδ (t ) =
d
X
t
Z
t
hδσ dBs , ei iei ,
i=
where σ ∈h End(Tep M ) such that
i
σσ ∗ = E gradep Fp (·, P ) ⊗ gradep Fp (·, P ) and Bt is a standard
Brownian motion on Tep M , (ei ) ≤i ≤d is an orthonormal basis
diagonalizing the symmetric bilinear form ∇dHp (ep ) and (λi ) ≤i ≤d
−δλi
1
s δλi −
1
0
1
1
1
1
1
are the associated eigenvalues.
Riemannian median and stochastic algorithms
30 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Perspectives
What if µ has some mass out of the convex ball B (a, r ) ?
Then where are the p -means ? Is ep unique ?
Whether the stochastic algorithm converges even in nonconvex
case ? If so, speed of convergence ?
Riemannian median and stochastic algorithms
31 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
References
Riemannian Lp center of mass : existence, uniqueness,
and convexity, Proceedings of the American Mathematical Society,
B. Afsari, S 0002-9939(2010)10541-5, Article electronically published on
August 27, (2010).
M. Arnaudon and X. M. Li, stochastic ows,
Barycenters of measures transported by
The Annals of Probability, vol. 33, no. 4,
15091543, (2005)
M. Arnaudon, C. Dombry, A. Phan and L. Yang, algorithms for computing means of probability
Stochastic
measures, preprint
hal-00540623, version 1, (2010).
Innovative Tools for Radar Signal Processing Based
on Cartan's Geometry of SPD Matrices and Information Geometry ,
Barbaresco F. IEEE International Radar Conference, (2008).
Riemannian median and stochastic algorithms
32 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
References
Interactions between Symmetric Cone and
Information Geometries, ETVC'08, Springer Lecture Notes
F. Barbaresco, in
Computer Science, 5416, pp. 124-163, (2009).
Robust Statistics on Riemannian Manifolds via
the Geometric Median, Neuroimage, (2009).
T. Fletcher et al. L. Yang, M. Arnaudon and F. Barbaresco, Riemannian Median,
Geometry of Covariance Matrices and Radar Target Detection,
European Radar Conference, (2010).
L. Yang, R
iemannian median and its estimation,
LMS J. Comput.
Math. Vol. 13, 461-479, (2010).
Riemannian median and stochastic algorithms
33 / 34
Introduction and Background
Geometry of Covariance Matrices
Riemannian p -means
Stochastic Algorithms
Perspectives
Thank you for your attention
Riemannian median and stochastic algorithms
34 / 34