Quotient spaces
advertisement

CHAPTER 8
Quotient spaces
Up to this point in the text, when introducing new concepts for topological spaces
such as Hausdorffness, compactness, connectedness etc, we have relied almost exclusively on the pool of examples from section 2.2 to illustrate these concepts. In this
chapter we introduce a rather simple yet powerful method for constructing new topological spaces from given ones by means of taking “quotients”. This operation is well
known in set theory and we extend it here to topology by endowing the quotient set
with a natural topology - the quotient topology. The first section introduces the relevant concepts and explores some of the properties of general quotient spaces. Of the
remaining sections, each focuses on a particular set of examples of quotient spaces.
8.1. Definition and properties of quotient spaces
We start this section by reviewing quotient sets first, postponing the relevant topology for a couple of paragraphs. We introduce three mutually equivalent but slightly
different viewpoints of quotient sets. We shall use each of these approaches below for
dealing with quotient spaces.
Definition 8.1. Let X be a non-empty set.
(a) The quotient set X/π associated to a surjective function π : X → Y onto a
non-empty set Y is defined to be X/π = Y .
(b) The quotient set X/ ∼ associated to an equivalence relation ∼ on X is the set
of equivalence classes: (X/ ∼) = {[x] | x ∈ X} with [x] = {x0 ∈ X | x0 ∼ x}.
(c) The quotient set X/P associated to a partition P = {Pi | i ∈ I} of X is defined
as X/P = I.
While there are seemingly three notions of quotient sets introduced in definition
8.1, these three notions coincide if the surjection π, the equivalence relation ∼ and the
partition P are properly related. Here is how one can do this:
π ⇒∼ Let π : X → Y be a surjective function and define the relation ∼ on X as
x1 ∼ x2
if
π(x1 ) = π(x2 )
Then the function (X/π) → (X/ ∼) given by x 7→ [x] is a bijection of quotient sets.
∼⇒ P Given an equivalence relation ∼ on X, we define the partition P on X by
P = {[x] | x ∈ X}
111
112
8. QUOTIENT SPACES
where [x] is as in part (b) of definition 8.1. The function (X/ ∼) → (X/P) given
by [x] 7→ [x] (where [x] is thought of an equivalence class and as an element of the
partition P) is again a bijection between quotient sets.
P ⇒ π Let P = {Pi | i ∈ I} be a partition of X with Pi 6= ∅ for all i ∈ I. We
define π : X → Y by setting Y = I and
π(x) = i
if
x ∈ Pi
The quotient sets (X/P) and (X/π) are actually equal by definition 8.1.
Notice that our considerations establish the commutativity of the diagram below
in which each map is a bijection.
/ {Equivalence relations ∼ on X.}
Surjections π : X → Y .
O
ggg
gggg
g
g
g
gg
gggg
gs ggg
Partitions P = {Pi | i ∈ I}
of X with Pi 6= ∅, ∀i ∈ I.
Example 8.2. Let X = {1, 2, 3, 4, 5, 6}, let Y = {e, o} and define π : X → Y by
π(1) = π(3) = π(5) = o
and
π(2) = π(4) = π(6) = e
Define the relation ∼ on X by
a∼b
if and only if
b − a is even
Finally, let P be the partition of X given by P = {{1, 3, 5}, {2, 4, 6}}. Then π, ∼ and
P are related as above and each of X/π, X/ ∼ and X/P, is a set of two elements.
With these preliminaries out of the way, we now turn to the topology of quotient
sets. We state our definition in terms of a surjective function π : X → Y though this
choice is arbitrary, we could equally well use equivalence relations or partitions.
Definition 8.3. Let (X, TX ) be a topological space, let Y be a any non-empty set
and let π : X → Y be a surjective function.
(a) The quotient topology TX/π on Y , induced by X and π (or simply the quotient
topology), is defined by
TX/π = {U ⊂ Y | π −1 (U ) ∈ TX }
(b) A function π : (X, TX ) → (Y, TY ) is called a quotient map if it has the property
that
U ∈ TY
if and only if π −1 (U ) ∈ TX
It is quite straightforward to verify that TX/π is a topology on Y . Clearly the empty
set and Y belong to TX/π since π −1 (∅) = ∅ and π −1 (Y ) = X. The second and third
axiom of a topology (definition 2.1) follow from the equalities
π −1 (∪i∈I Ui ) = ∪i∈I π −1 (Ui )
and
π −1 (∩i∈I Ui ) = ∩i∈I π −1 (Ui )
8.1. DEFINITION AND PROPERTIES OF QUOTIENT SPACES
113
where Ui ∈ Tx/π , i ∈ I (these two equalities were the subject of exercise ??). We leave
the details to the interested reader.
Remark 8.4. While definition 8.3 seemingly defines two new terms, those of a
quotient space and of a quotient map, each of these determines the other. It is an easy
exercise to show that π : (X, TX ) → (Y, TY ) is a quotient map if and only if TY = TX/π .
We postpone the exploration of concrete examples of quotient spaces for the moment
and instead turn to some general properties of quotient spaces.
Proposition 8.5. Let (X, TX ) be a topological space, let π : X → Y be a surjective
function onto the set Y and let TX/π be the associated quotient topology.
(a) The quotient map π : (X, TX ) → (Y, TX,π ) is continuous.
(b) The quotient topology TX/π on Y is the finest topology (see definition 2.3) for
which π is continuous. Said differently, if TY is any topology on Y for which
π : (X, TX ) → (Y, TY ) continuous, then TY ⊂ TX,π .
(c) If f : (X, TX ) → (Y, TY ) is a continuous surjection that is additionally also
either open or closed, then f is a quotient map.
Proof. (a) Immediate from definition 8.3.
(b) If TY is a topology on Y for which the map π : X → Y is continuous, then for
every U ∈ TY the set π −1 (U ) belongs to TX . Thus any such U automatically lies in
TX/π showing that the quotient topology TX/π is the finest topology on Y for which π
is continuous.
(c) Let f : (X, TX ) → (Y, TY ) be a continuous surjection and let U ∈ TY be any
set. By continuity of f , f −1 (U ) lies in TX . Suppose that f is also an open map and
that U ∈ TY is a set such that f −1 (U ) ∈ TX . The openness property of f implies then
that the set f (f −1 (U )) = U is open in Y . Thus TY = {U ⊂ Y | f −1 (U ) ∈ TX } is the
quotient topology associated to X and f .
If f is closed rather than open and if U ⊂ Y is again a set with f −1 (U ) ∈ TX , then
X − f −1 (U ) is a closed set and hence so is f (X − f −1 (U )) = Y − U . Thus U is again
an open set and we arrive at the same conclusion.
We next investigate when functions on a quotient space are continuous. For this
purpose, let (X, TX ) be topological space, let π : X → Y be a surjection and assume
that Y is given the quotient topology TX/π . Let (Z, TZ ) be another topological space
and let f : Y → Z be a function. Associated to f is the function fˆ : X → Z defined
by
fˆ = f ◦ π
Notice that if x1 , x2 ∈ π −1 (y) then fˆ(x1 ) = fˆ(x2 ), a fact that we will express by saying
that “fˆ is constant on π −1 (y) for each y ∈ Y ”.
Conversely, given a function fˆ : X → Z that is constant on π −1 (y) for each y ∈ Y ,
we can define f : Y → Z as
f (y) = fˆ(xy ) for any choice xy ∈ π −1 (y)
114
8. QUOTIENT SPACES
The constancy of fˆ on π −1 (y) guarantees that f is well defined. Thus, there is a
bijective correspondence between functions f : Y → Z and functions fˆ : X → Z, the
latter of which need to be constant on π −1 (y) for all y ∈ Y . The next theorem shows
that this correspondence remains bijective after restricting to the subset of continuous
functions in each of these sets.
Theorem 8.6. Let π : (X, TX ) → (Y, TX/π ) be a quotient map and let (Z, TZ ) be
a topological space. A function f : Y → Z is continuous if and only if the function
fˆ : X → Z given by fˆ = f ◦ π, is continuous.
Proof. If f : Y → Z is continuous then clearly so is fˆ : X → Z, being the
composition of two continuous functions. If on the other hand fˆ is continuous, then,
for any open set V ⊂ Z, consider f −1 (V ). This is open in Y if and only if π −1 (f −1 (V ))
is open in X. But
π −1 (f −1 (V )) = (f ◦ π)−1 (V ) = fˆ−1 (V )
and fˆ−1 (V ) is open in X by continuity of fˆ. Thus f too is continuous.
The situation of functions to a quotient space is somewhat more precarious. Certainly, given a function ĝ : Z → X, the induced function g : Z → Y given by g = π ◦ ĝ
is again continuous. But given a continuous function g : Z → Y , there need not be a
continuous function ĝ : Z → X with g = π ◦ ĝ. Examples of this type abound, see for
instance examples ?? and ??.
The next theorem points to which topological properties are inherited by quotient
spaces.
Theorem 8.7. Let π : X → Y be a quotient map. If X possesses property A,
chosen from the set of topological properties below, then Y also possesses A.
Connectedness,
Path connectedness,
A ∈ Compactness,
With some of the general properties of quotient spaces out of the way, we turn
to examples. Specific groups of examples are considered in sections ?? – ??. In this
section we only look at some very basic examples to illustrate definition 8.3. We do
so after first singling out two special scenarios of surjective functions π : X → Y that
play a prominent role in the remainder of this section.
Construction 8.8 (Quotienting out by a subset). Let (X, TX ) be a topological
space and let A ⊂ X be a subset of X. Let Y be the set Y = (X − A) ∪ {a} where a
is some abstract element not in X. Define the function π : X → Y by
x
; x∈X −A
π(x) =
a
; x∈A
and note that it is surjective. The space (Y, TX/π ) is typically denoted by (X/A, TX/A )
and referred to as the quotient of X by A. Note that it is the quotient space X/PA
associated to the partition PA = {A, {x} | x ∈ X − A} of X.
8.1. DEFINITION AND PROPERTIES OF QUOTIENT SPACES
115
Construction 8.9 (Gluing of topological spaces). Let (X1 , T1 ) and (X2 , T2 ) be
two disjoint topological spaces, let A ⊂ X1 be a given subspace and let f : A → X2 be
a continuous function. Let X = X1 t X2 and consider the partition P of X defined by
P = {{x}, {y} ∪ f −1 (y) | x ∈ X1 − A, y ∈ X2 }
The space Y = X/P is denoted by Y = X1 ∪f X2 and is said to have been obtained by
“gluing X1 to X2 along A by using the function f : A → X2 . ” (which we will typically
abbreviate by simply saying “X1 ∪f X2 is obtained by gluing X1 to X2 ”). Note that Y
is constructed by identifying points x ∈ A to their image f (x) ∈ Y . Points x ∈ X1 − A
and points y ∈ X2 − f (A) do not get identified with other points.
Example 8.10. Let Dn = {x ∈ Rn | ||x|| ≤ 1} and S n−1 = {x ∈ Rn | ||x|| = 1} be
the n-dimensional closed ball and the (n − 1)-dimensional sphere, each equipped with
the relative Euclidean topology. Since S n−1 ⊂ Dn , it makes sense to form the quotient
space Dn /S n−1 (see construction 8.8 above for the use of notation).
The main goal of this example is to establish the existence of a homeomorphism
f : (Dn /S n−1 , TDn /S n−1 ) → (S n , TEu )
To define the function f , we first introduce a couple of auxiliary functions. Let g1 :
Int(Dn ) → Rn be the homeomorphism given by (see exercise 8.1)
1+||x||
x
· ||x||
; x 6= 0
ln 1−||x||
g1 (x) =
0
; x=0
and let g2 : Rn → S n − {(1, 0, ..., 0} be homeomorphism (see exercise ??)
2y1
2y2
2yn
||y||2 − 1
,
, ...,
,
g2 (y1 , ..., yn ) =
||y||2 + 1 ||y||2 + 1
||y||2 + 1 ||y||2 + 1
Write Dn /S n−1 = (Dn −S n−1 )∪{s} where s ∈ Dn /S n−1 represents the image of S n−1 in
Dn /S n−1 under the quotient map π : Dn → Dn /S n−1 . Then we define f : Dn /S n−1 →
S n as
; x ∈ Dn − S n−1
g2 (g1 (x))
f (x) =
(0, ..., 0, 1)
; x=s
Clearly f is a bijection so we only need to verify that it is continuous and open. To
show that f is continuous, it suffices to show that fˆ = f ◦ π : Dn → Rn is continuous
(according to Theorem 8.6). From its definition, it is evident that fˆ is continuous
at all points x ∈ Int(Dn ) so we are left with verifying that this remains true for
x0 ∈ S n−1 . Noting that fˆ(x0 ) = (0, 0, ..., 0, 1) for each x0 ∈ S n−1 , let V ⊂ S n be
any neighborhood of (0, .., 0, 1). Continuity of fˆ at x0 will be demonstrated if we can
find a neighborhood U of x0 in Dn such that fˆ(U ) ⊂ V . Firstly, find an r > 0 such
that B(0,...,0,1) (r) ∩ S n ⊂ V . Without loss of generality we can assume that r ≤ 2 for
116
8. QUOTIENT SPACES
otherwise V = S n and then any neighborhood U of x0 maps into V . But if r ≤ 2, then
U = {x ∈ Dn | ||x|| > R} with
q
2 2
−1 −1
exp
r
q
where
exp(t) = et
R=
2
2
−1 +1
exp
r
is a neighborhood of x0 with fˆ(U ) = B(0,...,0,1) (r) showing that fˆ is continuous at x0
and consequently that f is continuous. The verification of the continuity of f −1 is left
as an exercise.
Example 8.11. Let X1 = X2 = [0, 1] and let A ⊂ X1 be the subset A = {0, 1} and
define f : A → X2 be f (x) = 1 − x. We will show that X1 ∪f X2 (see Construction 8.9
for notation) is homeomorphic to S 1 = {(x, y) ∈ R2 | x2 + y 2 = 1}.
As usual, let π : X1 t X2 → X1 ∪f X2 denote the quotient map and let the function
ĝ : X1 t X2 → S 1 be defined as
; t ∈ X1
(cos π0 t, sin π0 t)
ĝ(t) =
(cos π (t + 1), sin π (t + 1))
; t ∈ X2
0
0
where we use π0 to denote π0 = 3.14159... so as to distinguish it from π the quotient
map. Note that ĝ induces a function g : X1 ∪f X2 → S 1 since ĝ(0) = ĝ(f (0)) = (1, 0)
and ĝ(1) = ĝ(f (1)) = (−1, 0). According to Theorem 8.6, to show that g is continuous
it suffices to show that ĝ is continuous. The continuity of ĝ however, is immediate
and follows from Lemma 3.13 after observing that the subsets X1 and X2 are closed in
X1 t X2 . Finally, g is a bijection since it has in inverse function, namely
1
; y≥0
π0 arccos x ∈ X1
−1
g (x, y) =
1
arccos x ∈ X2
; y≤0
π0
Since S 1 is compact and since X1 ∪f ∪X2 is Hausdorff (which we leave as an easy
exercise), it follows from Corollary 6.10 that g is a homeomorphism.
Example 8.12. Consider the Euclidean line (R, TEu ) and let A ⊂ R be the subset
of all integers A = Z. Using the notation from Construction 8.8, we form the quotient
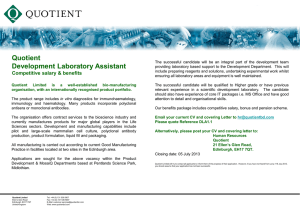
space R/Z. Visually, we should think of R/Z as having been gotten by collapsing
Z ⊂ R to a single point, as in Figure 1. This visual representation of R/Z is not unlike
that of the Hawaiian earrings H from Example 2.20 (also shown in Figure 1). Recall
that H is the union ∪∞
n=1 Cn of the circles
Cn = {(x, y) ∈ R2 | (x −
1 2
1
) + y2 = 2 }
n
n
and as a subset of R2 , H is equipped with the relative Euclidean topology.
8.1. DEFINITION AND PROPERTIES OF QUOTIENT SPACES
h−2, −1i
117
(x − 1)2 + y 2 = 1
h−1, 0i
(x − 12 )2 + y 2 =
1
4
h0, 1i
z
o
h4, 5i
h1, 2i
h3, 4i
h2, 3i
(a)
(b)
Figure 1. (a) A visual representation of R/Z. Each of the infinitely
many loops represents an open interval ha, a + 1i for some integer a ∈ Z.
Several such intervals are explicitly labeled. The distinguished point z is
marked by a black dot in the middle. (b) The Hawaiian earrings. Each
of the circles corresponds to {(x, y) ∈ R2 | (x − n1 )2 + y 2 = n12 } for some
integer n ∈ N. The distinguished point o = (0, 0) is labeled by a black
dot.
The goal of this example is to show that in fact R/Z and H are not homeomorphic,
despite the similarities in their appearances. We first observe that R/Z is not compact.
Namely, let
1
1
1
3 FR =
a − ,a +
, a + ,a +
a∈Z
2
2
4
4
be an open cover of R and let FR/Z = {π(U ) | U ∈ FR } be the associated open cover
of R/Z where π : R → R/Z is the quotient map. This open cover of R/Z has no finite
subcovers at all since every point π(a + 21 ), a ∈ Z lives in a unique open set π(ha +
1
, a + 34 i) while every point π(a + 15 ), a ∈ Z lives in a unique open set π(ha − 12 , a + 21 i).
4
On the other hand, H is a compact space. Being a subspace of R2 , it suffices to
show that H is bounded and closed. The boundedness of H is obvious and to verify
the closedness of H, let p ∈ R2 − H be any point. Then there exists an integer n0 ∈ N
such that p lies inside of Cn for all n < n0 and p lies outside of Cn for all n ≥ n0
(if p lies outside of C1 we take n0 = 1). If n0 = 1 let r = dC (p) and if n0 > 1 let
r = min{dCn0 (p), dCn0 +1 (p)}. In either case, the ball Bp (r) lies entirely in R2 − H
showing that R− H is open and thus that H is closed.
Finally, since compactness is a topological invariant (Proposition 6.8), R/Z and H
cannot be homeomorphic.
118
8. QUOTIENT SPACES
Example 8.13. Consider again the Euclidean line (R, TEu ) and let A ⊂ R be the
set of rational number Q. By considering the quotient space R/Q, we will demonstrate
that the Hausdorff property of a topological space may disappear when passing to one
of its quotient space.
Thus, to see that R/Q is not Hausdorff, let x, y ∈ R be any two distinct irrational
elements in R and let π(x), π(y) be their images in R/Q under the quotient map
π : R → R/Q. Note that π(x) 6= π(y). Suppose that Uπ(x) and Uπ(y) are neighborhoods
of π(x) and π(y) in R/Q. Then Vx = π −1 (Uπ(x) ) and Vy = π −1 (Uπ(y) ) are neighborhoods
of x and y in R and as such, both contain a rational number, say qx ∈ Vx ∩ Q and
qy ∈ Vy ∩ Q. But then we can conclude that π(qx ) ∈ Uπ(x) and π(qy ) ∈ Uπ(y) and since
clearly π(qx ) = π(qy ), we find that Uπ(x) and Uπ(y) cannot be disjoint. Accordingly,
R/Q is not Hausdorff even though R clearly is.
8.2. Surfaces as quotient spaces of polygons
Definition 8.14. Given an integer n ∈ N ∪ {0}, a n-dimensional topological manifold (or n-manifold for short) is a second-countable, Hausdorff space (X, TX ) in which
every point p ∈ X has a neighborhood homeomorphic to Rn (with the Euclidean
topology). An n-manifold with n = 2 is called a surface.
8.3. Lens spaces
Let p, q ∈ Z be two relatively prime integers (gcd(p, q) = 1) and pick m, n ∈ Z so
that det A = −1 where A is the 2 × 2 matrix
m p
(8.1)
A=
n q
Let S 1 × D2 be a solid torus thought of as a subset of C2 , namely
S 1 × D2 = {(z, w) ∈ C2 | |z| = 1, |w| ≤ 1}
Likewise, we will also regard T 2 = ∂(S 1 × D2 ) = S 1 × ∂D2 = S 1 × S 1 as a subset of
C2 , that is
T 2 = {(z, w) ∈ C2 | |z| = |w| = 1}
Definition 8.15. Let U and V be to solid tori (i.e. U ∼
= S 1 ×D2 and V ∼
= S 1 ×D2 )
and let ϕA : ∂U → ∂V be the map
(8.2)
ϕA (t, s) = (tm · sp , tn · sq )
associated to the matrix A from (8.1). The lens space L(p, q) is the identification space
of the disjoint union U t V with respect to the partition P given by
n
o
◦
◦
P = {x}, {y}, {z, ϕA (z)} x ∈U , y ∈V , z ∈ ∂U