Burst-mode and scanSAR interferometry
advertisement

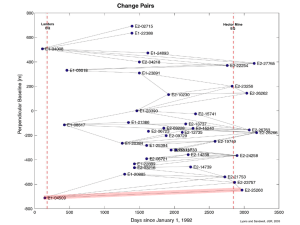
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 1917 Burst-Mode and ScanSAR Interferometry Jürgen Holzner, Student Member, IEEE, and Richard Bamler, Senior Member, IEEE Abstract—ScanSAR interferometry is an attractive option for efficient topographic mapping of large areas and for monitoring of large-scale motions. Only ScanSAR interferometry made it possible to map almost the entire landmass of the earth in the 11-day Shuttle Radar Topography Mission. Also the operational satellites RADARSAT and ENVISAT offer ScanSAR imaging modes and thus allow for repeat-pass ScanSAR interferometry. This paper gives a complete description of ScanSAR and burst-mode interferometric signal properties and compares different processing algorithms. The problems addressed are azimuth scanning pattern synchronization, spectral shift filtering in the presence of high squint, Doppler centroid estimation, different phase-preserving ScanSAR processing algorithms, ScanSAR interferogram formation, coregistration, and beam alignment. Interferograms and digital elevation models from RADARSAT ScanSAR Narrow modes are presented. The novel “pack-and-go” algorithm for efficient burst-mode range processing and a new time-variant fast interpolator for interferometric coregistration are introduced. Index Terms—Burst-mode, ENVISAT, pack-and-go algorithm, RADARSAT, ScanSAR, SRTM, synthetic aperture radar interferometry. I. INTRODUCTION S CANSAR uses the burst-mode technique to image large swaths at the expense of azimuth resolution [1], [2]. Typical swath widths of RADARSAT and ENVISAT/ASAR ScanSAR images are 300–500 km, and azimuth resolution is in the order of 50 m–1 km. ENVISAT/ASAR uses burst-mode imaging also for its alternating polarization mode [3]. Interferometric (InSAR) applications can benefit from the increased swath width of ScanSAR data or the increased information content in alternating polarization mode data. Some attractive properties of wide swaths are more economic use of ground control points for calibration of the imaging geometry, reduced need for postprocessing to mosaic large digital elevation models (DEMs), and more frequent coverage for differential InSAR applications. Only ScanSAR interferometry made it possible to map 80% of the earth’s landmass during the 11-day Shuttle Radar Topography Mission (SRTM). In all of these cases, and in contrast to the traditional strip-map modes, the raw data consist of bursts of radar echoes with azimuth extent shorter than the synthetic aperture length. This acquisition strategy is the reason for the azimuth-variant Manuscript received December 18, 2001; revised June 20, 2002. This work was carried out in the context of RADARSAT NASA-ADRO Project 500. The RADARSAT data are copyright Canadian Space Agency 1996, 1997, and 1998. DLR’s research and development activities on RADARSAT ScanSAR interferometry were supported in part by the former DARA in the framework of the GEMSAR project and by the German Canadian Scientific Technical Cooperation Programme. The authors are with the German Aerospace Center (DLR), Oberpfaffenhofen, D-82234 Wessling, Germany (e-mail: juergen.holzner@dlr.de). Digital Object Identifier 10.1109/TGRS.2002.803848 spectral properties of the signal (Section III) and complicates synthetic aperture radar (SAR) signal processing and interferometric processing. Since the ScanSAR modes of current satellites were motivated by radiometric imaging rather than by interferometry, the development of phase-preserving and interferometric burst-mode processors is far behind the established processing chains for strip-map mode data. There is, for example, no complex ScanSAR product in the official RADARSAT or ENVISAT/ASAR product lists. Several algorithms have been proposed in the scientific literature [4]–[7], and an operational dedicated system for the single-pass SRTM interferometer has been built up by the Jet Propulsion Laboratory recently [8]. The purpose of this paper is to give a description of burst-mode and ScanSAR interferometry, including signal properties and necessary processing steps. Several algorithms are compared with respect to their expected accuracy, throughput, implementation effort, and reusability of software from strip-mode processors. The repeat-pass case is considered throughout the paper, and the theoretical findings are illustrated by a RADARSAT ScanSAR example. The paper is organized as follows. Section II describes the RADARSAT modes and the dataset used in the paper. Section III reviews the particular properties of burst-mode SAR data. Section IV discusses important preprocessing steps. In Section V several phase-preserving burst-mode processing algorithms are compared, while Section VI discusses two interferometric processing schemes. Section VII finally gives an example for a first RADARSAT ScanSAR DEM. II. INTERFEROMETRIC RADARSAT DATASETS The RADARSAT SAR instrument provides various imaging modes, such as the strip-map mode with standard (S1–S7), wide (W1–W3), and fine (F1–F5) beams as well as various ScanSAR modes [9], [10]. The so-called ScanSAR Narrow modes combine beams W1 and W2 for the “ScanSAR Narrow Near,” or W2, S5, and S6 for the “ScanSAR Narrow Far” modes, respectively. Both narrow modes cover a swath width of about 300 km. The ScanSAR wide modes combine beams W1, W2, W3, and S7, or W1, W2, S5, and S6, providing swath widths of 500 and 450 km, respectively. RADARSAT is the first spaceborne system to operate in ScanSAR mode that is also able to provide suitable data for ScanSAR interferometry. RADARSAT was not designed originally for repeat-pass InSAR. Both the orbit accuracy and the repeat cycle of 24 days are not favorable in this respect. On the other hand, RADARSAT’s 30-MHz fine-resolution mode combined with 49 ) provides an interferometric large incidence angles ( mode with a critical baseline as large as 6 km. First results on interferometry and differential interferometry using 0196-2892/02$17.00 © 2002 IEEE 1918 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 TABLE I RADARSAT DATASETS USED FOR SCANSAR INTERFEROMETRY IN THIS PAPER. WE DENOTE VARIATION FROM NEAR TO FAR RANGE BY “…” Fig. 1. Critical baseline of various RADARSAT modes and ERS as a function of incidence angle. The bandwidths of the SAR modes are 11.6, 17.3, 30.0, and 15.5 MHz for wide, standard, fine beam mode, and ERS, respectively. RADARSAT’s strip-map modes have been reported in [11]. In ScanSAR modes, however, the range bandwidth is as low as 11.6 MHz, giving a critical baseline in the order of 600 m (Fig. 1). RADARSAT cannot synchronize its azimuth burst cycles at different acquisitions. In order to maximize coherence, a step called azimuth scanning pattern synchronization (ASPS) is required for preprocessing the datasets. The aim is to preserve only those raw data lines of companion bursts that image the same area on ground (Section IV). Since the chance of obtaining overlapping raw data lines decreases with the number of beams, only ScanSAR Narrow mode can be considered suitable. We have ordered data acquisitions based on RADARSAT’s predicted orbit drifts. Among the 12 ScanSAR datasets, two pairs could be formed with baselines shorter than the critical one. In the following, we will use the pair with the better azimuth scanning pattern overlap. The properties of this data pair are summarized in Table I. III. BURST-MODE SIGNAL AND SPECTRAL PROPERTIES This section reviews the unique properties of burst-mode data. In Section III-A we recall some important basics of SAR processing in order to lay a common ground concerning the terminology used in the paper. SAR processing algorithms must consider the hyperbolic form of the range history, while for our derivations the quadratic Taylor series approximation of (1) is sufficient and will be used throughout the paper. Let the SAR periodically transmit pulses of the form , where [s] denotes the fast (range) time unique to each pulse with origin at the particular transmit event and where [Hz] is the radar carrier frequency. In the case of is a complex-valued chirp. a chirped pulse, the function All received pulses are replicas of the transmitted pulse delayed , where [m/s] by the round-trip delay time represents the velocity of light, with amplitude given by the radiometric radar equation. The only radiometric component relevant for this paper is the two-way azimuth amplitude (scaled to the azimuth time coordinate). antenna pattern After coherent demodulation, i.e., removal of the radar carrier frequency, the ensemble of received pulses is given by A. SAR Signal Processing Preliminaries Since SAR data acquisition and processing are linear operations, it is sufficient to consider how a point-like scatterer is imaged. Let a (strip-map) SAR fly along a straight path with [m/s] and illuminate a point scatterer at a distance velocity [m] to the flight path. The position of the scatterer is further determined by the time [s], when SAR and scatterer have a minimum distance (point of closest approach or zero-Doppler and reference the scatterer position in a position). Then cylindrical radar coordinate system (the third coordinate—the look angle—is only accessible by interferometry). The instantaneous distance of the SAR to the scatterer at azimuth time [s] is (1) (2) This point response shows a range sweep characterized by , while and are the envelope and the phase term of the azimuth chirp, respectively. SAR processing “convolves” the raw data with an appropriate filter kernel such that every raw data point response gets focused to a sharp point as narrow as the range and azimuth bandwidths of the system allow. In fact, the required operation is not a convolution in the strict sense, since the point response to be inverted is range-variant [see (2)]. SAR focusing usually starts with range compression, i.e., the application of a simple range-matched filter to compress the transmitted range chirp. After that operation, the raw data look like a short pulse, i.e., as HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1919 Fig. 2. Raw data of a single-point scatterer recorded in strip-map (top) and in four-look burst-mode (bottom). To illustrate the oscillations in these complex-valued signals, only the real parts are shown. The range migration is exaggerated to illustrate the SAR response properties. if a sinc-like envelope was transmitted. Fig. 2 (top) illustrates such a range-compressed raw-data-point response. Clearly visible is the range sweep or range cell migration effect due to , renthe range history in the envelope term dering the problem of SAR processing not only range-variant but also two-dimensional. This means that SAR processing is not readily separable into independent azimuth- and range-filtering steps. In order to achieve separability, most of the SAR processing algorithms employ an operation called range cell migration correction that straightens the range trajectory prior to a purely one-dimensional (1-D) range-variant azimuth filtering. For the purpose of this paper, it is sufficient to know that high-quality strip-map SAR focusing algorithms exist (e.g., see [12] and [13] and references therein). We will introduce and discuss burst-mode processing algorithms that take maximum advantage of existing strip-map algorithms as far as possible. Since burst-mode data differ from strip-map data only in the azimuth direction, we can simplify the equations and consider only the azimuth direction of the SAR signal. For convenience, we will use the quadratic approximation of the range history of (1), the azimuth (Doppler) frequency modulation rate FM Hz s (3) and the Doppler frequency envelope generated by the azimuth antenna pattern FM (4) B. Strip-Map Signal Now, let [Hz] be the (Doppler) frequency domain coordinate conjugate to azimuth time , PRF [Hz] the pulse repetition [Hz] the processed Doppler bandfrequency (PRF), and width of a strip-map (nonburst) SAR signal. Then, the synthetic aperture length is FM s or PRF number of range lines (5) The azimuth resolution of such a SAR system is (in time units) FM s (6) where is a factor close to unity that depends on the shape of the azimuth antenna pattern and on weighting functions used by the SAR processor for side-lobe control. For simplicity, we throughout the paper. The effective strip-map will use is azimuth raw data signal of a point scatterer located at then given by FM FM (7) with spectrum (stationary phase approximation) FM (8) Here, we have assumed zero-Doppler steering of the antenna beam and have discarded an inconsequential factor in the specis the spectral envelope and reflects the two-way trum. Doppler antenna pattern (Section III-A). For mathematical convenience, we also include any weighting and band-lim. Within the iting function applied during processing in FM is the time-domain stationary phase approximation, envelope of the azimuth chirp. Its support is restricted to . SAR processing removes the quadratic phase from the spectrum of (8). Hence, the shape of the focused point target is the inverse Fourier transform of response (9) 1920 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 Fig. 3. Train of raw-data bursts and its spectrum (magnitude) according to (14). where corresponding small and capital letters denote the ]. Since is Fourier transform pairs [e.g., , has the resolution given band-limited to in (6). phase assumption. The low time-bandwidth-product case has been investigated in [14]. The number of bursts per synthetic aperture (12) C. Burst-Mode Signal Consider now that the SAR system characterized above is consecutive operated in the burst-mode such that bursts of [s]. We will refer to echoes are recorded every s or PRF as the burst duration and to s or PRF number of range lines (10) number of range lines (11) is often called the number of looks. Fig. 2 illustrates the relationship between the strip-map and the burst-mode SAR raw data of a single point scatterer. For the illustrations in Figs. 2, 3, 5, and . 9, we use The burst-mode raw-data-point scatterer response can be described as FM in general is not as the burst cycle period. Note that integer, since the SAR may be operated at a different PRF between two bursts [5]. This subtlety is not substantial for the following signal description and will not be considered further. Throughout the paper, we assume that the number of range lines per burst is large enough for a sufficiently high time-bandwidth product, such that we can use the stationary rect FM (13) with spectrum (within the stationary phase approximation) FM rect FM (14) HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1921 Fig. 4. Time-frequency diagram of focused multiple-burst RADARSAT ScanSAR data in a distributed target area (f : Doppler centroid frequency). where and are the burst bandwidth and the spectral burst cycle period, respectively: FM and FM (15) Fig. 3 illustrates the relationship of the burst-mode signal to its spectrum. Each burst contributes an approximately rectangular-shaped band-pass spectrum at center frequency FM , which depends on the location of the point scatterer and the burst number . We will neglect in the slight distortion of these rect-functions due to the following. Weighting of the bursts is often applied in the processor for purposes of side-lobe control. In that case, the single-burst spectrum reflects the shape of the weighting function rather than a rect-function. If each of the bursts is processed individually, its point response will be FM (16) with the inherent single-burst resolution of FM s (17) If the full-burst train is processed coherently, the spectral and time-domain representations of the coherent point response will be [5] rect Fig. 5. Relationship of single-burst and burst train point responses. The small SAR image patch shows the response of a corner reflector processed in the burst train fashion [5]. Fig. 6. Doppler centroid estimates f^ (circles) as a function of range and fitted second-order polynomial (data: RADARSAT ScanSAR Narrow, orbit 10 969). position the entire Doppler bandwidth to is swept. The distance between the bursts in time coordinates is the burst period time , and in Doppler domain it is the frequency . difference The same point response as given in (19) will apply if the individually focused bursts are summed coherently. Obviously, can be interpreted as a train of full-aperture (strip-map) with the single-burst point response point responses as an envelope (Fig. 5). FM IV. PREPROCESSING (18) (19) Fig. 4 illustrates the time-varying property of the transfer function (see also [6]) estimated from real data in a distributed target area (ScanSAR dataset 10 969, Table I). The energy of the burst data is represented in the domain spanned by azimuth frequency versus azimuth time. It is concentrated in areas that show the mentioned azimuth dependency of the burst raw-data signal. For one scatterer, the spectrum of the processed signal is of bandFM centered around pass type with bandwidth FM [see (18)]. Thus, with varying scatterer A. Doppler Centroid Estimation Doppler centroid estimation of burst-mode data is more difficult than in the strip-map case due to the particular shape of the spectra. Spectra are distorted according to the azimuth intensity profile of the target. They require sufficiently large estimation windows to average out the distortions. In our implementation, the bursts are packed densely in the azimuth direction—giving an uninterrupted sequence of range lines—and then passed through a standard Doppler centroid estimator. This procedure fits well into the pack-and-go algorithm described later. Fig. 6 depicts the Doppler centroid estimates as a function of range and the resulting second-order polynomial fits. The estimates are based on range-compressed data. We have used window sizes of 10 000 range lines by 150 range samples, i.e., 1922 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 Fig. 7. Range displacement of two azimuth looks of a point-like target as a function of PRF bands. The correct PRF band is 5 (data: RADARSAT ScanSAR, orbit 10 969). 0 45 and 53 estimation windows for beam 1 and beam 2, respectively. A quadratic fit to these estimates suggests a standard deviation of the individual estimates of about 20 Hz for beam 1 and 10 Hz for beam 2. After fitting the Doppler centroid, the error reduces to about 3 Hz and is thus negligible. The interferometric image pairs were processed to the average of the estimated Doppler centroid frequencies of the two datasets to avoid spectral decorrelation in azimuth. B. PRF Ambiguity Resolution RADARSAT is not yaw-steered like ERS or ENVISAT. Hence, Doppler centroid values exceeding PRF/2 are expected, making PRF ambiguity resolution necessary. We modified the range look correlation technique [15] for this purpose. Since ScanSAR scenes cover areas about 10 times as large as strip-map images, it is very likely that there are a few point-like targets in the scene. These points can be detected automatically and used for range look correlation. Fig. 7 shows the range cross-correlation offset of two looks of a point-like target. In this case, a safe determination of the PRF band was possible using a single point. In less favorable cases, the results from several points must be averaged. C. Azimuth Scanning Pattern Synchronization Interferogram formation from burst-mode data requires the synchronization of the burst patterns [azimuth scanning pattern synchronization (ASPS)] [6], [16]. The following procedure was applied [16]. First a small azimuth portion of the master and slave dataset is processed to a complex image. This means that several bursts are processed and added coherently at the acquisition PRF (multiple coherent burst method; see Section VI-C). Then (for each beam separately) a patch at midrange is taken to determine the mutual azimuth shift between the two images. We implemented the measurement by forming interferograms for different mutual shifts. The lag with the maximum interferogram spectral peak is chosen. This allows for azimuth coregistration of the two burst-mode raw datasets to an accuracy of at least one range line, i.e., sufficient along-track referencing of the two azimuth-scanning patterns. Fig. 8. Peak value of interferogram spectrum versus mutual azimuth shift for azimuth scanning-pattern synchronization. Fig. 8 shows the variation of the spectral peak maximum as a function of mutual shift after synchronization of the scanning patterns. The strong peak of the curve suggests sufficiently accurate ASPS. An obvious feature of the curve is its modulation, which is caused by the particular correlation properties of the burst-mode data (Section VI-D). Once the mutual displacement of the two datasets has been determined, only the range lines that have counterparts in the other dataset’s on-cycle are kept for further processing; all the others are discarded [16]. Table I lists the number of remaining burst lines and the corresponding burst bandwidth for the dataset under investigation. Each burst has a bandwidth of about 95 Hz, resulting in an azimuth resolution on the order of 75 m. This resolution is better than the one of DTED-1 with sampling grid of about 100 m [17]. V. PHASE-PRESERVING BURST-MODE PROCESSING Several algorithms have been proposed for phase-preserving processing of burst-mode data [4]–[8], [18]. The basic question is: what does a complex burst-mode image product look like? Two approaches are possible with implications for data volume and further interferometric processing: single- and multiple-burst image processing. A. Single-Burst Images In this option, the bursts are processed to individual complex images. The complex burst-mode product is then the ensemble of these burst images. Each burst image has a resolution of [see (17)] and covers an azimuth extent of . Allowing for the same azimuth oversampling factor as the raw data, its sampling frequency will be PRF PRF (20) and it is sufficient to represent the burst image by PRF PRF and subswath, we range lines. Per synthetic aperture burst images of range thus have HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY Fig. 9. 1923 Pack-and-go range processing of a burst train. For illustration purposes, the raw data are assumed to be pre-range-compressed. lines each, i.e., a data volume and processing effort of PRF lines. The factor (21) is approximately the number of ScanSAR subswaths (or polarization modes in the ASAR case). An inconvenience associated with individual burst images is their azimuth-variant spectral bandpass characteristic (time-frequency diagram in Fig. 4). Although the signal is of bandpass type in a small neighborhood of every azimuth position, the bandpass center frequency varies linearly with azimuth from to and wraps around several times in the PRF Nyquist band of the burst image. This excludes the use of standard coregistration and resampling algorithms for later interferometric processing. B. Multiple-Burst Images An alternative complex burst-mode product would be the coherent superposition of the burst images forming a single full-aperture image file. Such a representation facilitates data handling and visual browsing, although it suffers from the “nasty” shape of the point response of Fig. 5. It has been shown, however, that a low-pass filter applied to the detected image gives an image comparable to the one obtained by incoherent superposition of burst images [5]. The average spectral envelope of such a complex burst-mode image is equivalent to that of a strip-map SAR signal. Hence, standard interferometric processing algorithms can be applied (Section VI). The price to be paid is increased data volume. The full-aperture image requires the same PRF as the raw data and, hence, has a data than in volume higher by a factor of the aforementioned individual burst case. If the superposition Fig. 10. Azimuth power spectral densities (normalized) of strip-map, single-burst, and multiple-burst interferograms. Stationary Gaussian scattering and a linear phase ramp, i.e., a single fringe frequency f , are assumed. The triangular shapes of the spectra apply for rect-shaped burst profiles. In case the bursts are weighted for side-lobe control, the triangular spectra are replaced by the autocorrelation of the weighting function. Note that the position of the Dirac distribution is restricted to the support [ , ] or [ , ] for the strip-map mode or burst-mode data, respectively. 0W W 0W W image is to be formed from single-burst images, the data will have to be oversampled from PRF to PRF before adding them coherently. For the following systematic overview of burst-mode processing strategies, we have conceptually separated the processing chain into range and azimuth processing. The first step includes range compression, range cell migration correction, 1924 Fig. 11. IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 Measured ACF of (a) ScanSAR single look, (b) multiple ( N = 2), (c) comparison of both, and (d) histogram of 121 coregistration estimates. and secondary range compression, leaving the second step as a purely 1-D azimuth compression (AC). C. Range Processing Within this section, we will focus on modifications of highprecision strip-map algorithms. Standard SAR processing algorithms [12] such as range-Doppler, wavenumber domain, or chirp scaling can be used for range processing of burst-mode data. Three approaches are possible. 1) Single-Burst Range Processing: Each burst of range lines is processed separately by a standard processor whose azimuth compression has been disabled. This method is computationally efficient and has been adopted for use in the extended chirp scaling (ECS) algorithm [7] and in the ScanSAR extension of our BSAR processor [19]. However, often the bursts must be supplemented by a number of range lines containing zeroes to the next power of two. 2) Pack-and-Go Range Processing: Since during range processing (almost) no energy leakage in azimuth occurs, HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1925 Fig. 12. (a) Differential phase of the beam 1 and beam 2 interferogram in the overlap area after reduction of a phase offset of phase versus azimuth in (b) shows no systematic effects. several bursts can be concatenated (with a few zero-lines as “safety margins” separating the different bursts) and processed simultaneously by the standard SAR processor. After range processing, the bursts can be easily separated (Fig. 9). This method is more efficient than single-burst processing, since arbitrarily long FFTs can be used and zero padding (to meet the power-of-two requirement) is negligible. Existing strip-map SAR processors can be used like a black box, no matter how large their internally used azimuth processing blocks are. Also Doppler centroid estimation that uses large estimation windows can be conveniently applied to this packed burst dataset (Section IV-A). We denote this new efficient algorithm by “pack-and-go.” 3) Coherent Full-Aperture Multiple-Burst Processing: A less efficient algorithm for range and azimuth processing has been proposed in [5]: the interburst pauses are filled with zeroes such that the burst train resembles a standard strip-map-mode raw dataset where some range lines (the pause lines) have been deliberately set to zero. The resulting coherent burst train (as depicted in Fig. 9, top) is then processed in range and azimuth just like a standard strip-mode raw dataset. Also, this algorithm can use existing strip-map SAR processors conveniently at the expense of reduced throughput. The resulting image is already sampled at the final sampling rate PRF, and oversampling of burst images is not required. D. Azimuth Processing 1) SPECAN: The classical SPECAN algorithm is computationally efficient and can be made phase-preserving. A focused burst image, however, exhibits a range-dependent azimuth 03.11 rad. The range mean of the sample spacing known as fan-shape distortion and, hence, requires an additional interpolation step. 2) Azimuth-Variant Filtering: After a burst has been range processed, standard azimuth compression is applied. The result is a coherent superposition of several shifted replicas of the desired burst image. A time-domain azimuth band-pass filter whose center frequency varies with azimuth position is required finally to separate the correct result from the aliased one [6]. 3) ECS: The high-precision ECS algorithm [7] is a combination of chirp scaling for accurate range processing and SPECAN for azimuth processing. An azimuth scaling step is added to equalize the frequency rates of the azimuth chirps. Due to this trick, 1) fan-shape distortion of the classical SPECAN is avoided; 2) no interpolation is required; and 3) the final azimuth sampling grid can be chosen arbitrarily. This also allows for mosaicking the processed subswaths (possibly taken at different PRFs) to the complete ScanSAR image without further interpolation. 4) Time-Domain AC: Since the bursts are usually short (e.g., 100 range lines), a straightforward time-domain azimuth correlation is an alternative to frequency domain methods. Although not as efficient, it is most easily implemented and allows for a free choice of the output sample spacing. We used this flexible method to process the RADARSAT ScanSAR data (Table I) used in this paper. 5) Coherent Multple-Burst Processing: If the bursts have been range processed according to the above-mentioned coherent multiple-burst range processing technique (Section V-C3), standard azimuth compression can be applied to the burst train. The result is equivalent to a coherent superposition 1926 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 Fig. 13. Phase and amplitude of the two-beam RADARSAT ScanSAR interferogram. HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1927 Fig. 14. Stability of the complex interferogram phase. The phase stability increases (brighter values) in the beam overlap area. of the (correctly coregistered and oversampled) individual burst images [5]. As a consequence, the azimuth impulse response function exhibits the mentioned strong interference modulation (Fig. 5). small analysis windows to consider constant (azimuth spectral shift is discussed in Section VI-G). The cross correlation of and is given by the two processes VI. BURST-MODE AND RADARSAT SCANSAR INTERFEROMETRIC PROCESSING is the Dirac distribution, and the asterisk “ ” dewhere notes complex conjugate. (master) (slave), The focused strip-map SAR data , is obtained by convolution with the end-to-end system impulse response function from (9) by the following integral: With the complex burst-mode images available, there are two options for further interferometric processing that will be discussed in the following: single-burst and multiple-burst interferograms. We will derive the power spectral densities of the different types of burst interferograms. In order to simplify the equations, we will again restrict ourselves to the azimuth direction of the SAR signal. As a reference, we start with a review of spectral properties of strip-map interferograms. (23) (24) Moreover, we use the standard definition of the coherence of an : interferogram pixel (25) A. Spectrum of Strip-Map Interferograms We assume homogeneous targets, i.e., Gaussian stationary scatterers with the following complex reflectivity functions [20]: Using (24) and Parseval’s theorem, we find for the coherence of a strip-map signal [21] (22) , , and are independent zero-mean The functions white circular complex Gaussian processes. We denote the co(temporal coherence) and a herence between both signals as possible azimuth fringe frequency as . We assume sufficiently (26) the transfer functions . responses are the Fourier transforms of the 1928 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 In order to find the power spectral density (PSD) of the strip-map interferogram, we calculate the autocorrelation of the interferogram and transform it function (ACF) into Fourier domain. The interferogram ACF is obtained by (27) and by using the well-known Reed’s theorem [22], we find (28) and being the ACFs of and , respectively. For better comparison of the individual interferograms—strip-map, single, and multiple coherent burst—we define the following normalized version of the interferogram ACF: with (29) By inserting (28) and (25) as well as taking into account the notation for the coherence in (26) we find Fig. 15. ScanSAR interferogram and DEM (Figs. 13–15) cover an area of about 110 km in azimuth and 350 km in range. It includes the city of Las Vegas, the Colorado River, and the Grand Canyon (map: © www.expedia.com/ dayily/home/default.asp). This coherence can be maximized by processing, i.e., azimuth spectral shift filtering. The maximum obtainable value will be the temporal coherence component . Since the strip-map SAR impulse response is time-invariant, the PSD of the SAR signals is also rectangularly shaped (assuming zero-Doppler steering): rect (30) We see that the last term in the second line of (30) is directly related to coherence magnitude and the interferometric phase ramp. Since the ACF of the interferogram only depends on (the time lag between the considered interferogram pixel) and since the coherence magnitude in (26) is a constant, we consider the interferogram process as wide-sense stationary. The Fourier transform of (30) is then the normalized PSD of the strip-map interferogram (33) Consequently, their correlation is a trifunction with bandwidth centered around zero frequency. Thus, we obtain the fol2 lowing for the normalized power spectrum from (31) and using (32): tri tri (34) is the Fig. 10 illustrates this normalized PSD. Obviously, ratio of the impulse integral of the spectral line at the center fringe frequency and the integral of the extended triangle spectrum. B. Single-Burst Interferograms (31) where “ ” is the correlation operator. In summary, the power spectrum of the interferogram is the cross correlation of the power spectra of the individual channels plus a Dirac distribution centered around the fringe frequency with a weight equal to the square of the coherence of the two SAR signals. For example, consider two identical strip-map SAR systems with a rectangular-shaped transfer function—perfectly coregistered SAR signals with the same Doppler centroid. Then, the coherence of (26) is given by tri (32) Given the individual complex burst images of the master dataset and the corresponding ones of the slave data, small interferograms are generated from each pair of companion burst images. These are referred to as “burst interferograms” or “interferometric looks.” In a second step, the burst interferograms are properly shifted in azimuth and are concatenated or (in case of overlap) coherently added to form a full interferogram of the subswath under consideration. With the usual ScanSAR scenarios, several ( ) of these burst interferograms overlap at every point of the final interferogram. This leads -look processing. to a phase noise reduction equivalent to Since the variation of the bandpass center frequency with azimuth inherent to the complex burst images is the same in the corresponding master and slave image, it cancels out in the burst interferogram. Therefore, the burst interferograms can be HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1929 Fig. 15. (Continued) Resulting ScanSAR DEM. The Grand Canyon is stretching from the middle to the right edge of the DEM. In the upper left part of the DEM, the plane (about 20 km 20 km) hosting the city of Las Vegas is visible. The region used for quality assessment (Fig. 16) is marked by a rectangle. 2 1930 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 added without oversampling. The resolution of the final -look interferogram is . In analogy to the derivation of the strip-map interferogram multilook averspectrum, we find the normalized PSD of aged single-burst interferograms (Fig. 10) tri tri (35) Note that due to the multilooking of the burst interferograms, the ; energy of the extended triangle is reduced by a factor of hence, coherence or phase stability is larger than in the strip-map case. C. Multiple-Burst Interferograms For the multiple-burst interferometric processing, the burst images from each beam are added coherently before interferogram formation as described above. This is done automatically, if the coherent multiple-burst range and azimuth processing algorithm has been used (Sections V-C3 and V-D5). The result is but having the oscillating azimuth an image with bandwidth impulse response function of Fig. 5. From the two high-bandwidth images, we form the interferogram and obtain for the normalized PSD tri tri (36) Subsequent azimuth averaging of adjacent interferogram and samples, i.e., low-pass filtering with a filter down-sampling, reduces the bandwidth and sampling frequency to that of a single-burst interferogram and removes the oscillations in the point response function. The normalized PSD of the filtered multiple-burst interferogram is then (37) We see that for a filter that picks our the center triangle spectrum, rect , the spectrum of the low-pass e.g., filtered multiple-burst interferogram (37) and the spectrum of the single-burst multilook interferogram (35) are equivalent. As already mentioned, the intermediate increase in bandwidth requires redundant sampling of each burst image and increases the data volume input to the interferometric processor. On the other hand, at the higher spectral resolution, the average spectrum of this data resembles strip-map spectra, and, therefore, conventional coregistration and resampling techniques can be applied (see Section VI-E). D. Estimation of Coregistration Parameters Coregistration parameters between the master and the slave images are often estimated by cross-correlating homologous image chips. The accuracy of mutual azimuth shift estimates is proportional to the resolution of the images [23]. In the , where the case of single-burst images, this means comes in, since at any point independent shift factor estimates can be derived. For multiple-burst images, estimation of the mutual azimuth shift requires some care: due to the modulation of the impulse response function, multiple local correlation maxima will occur (Figs. 8 and 11). Also, coherence as a function of azimuth misregistration exhibits multiple maxima. If we can find the global maximum, the inherent resolution becomes the determining factor for coregistration , the expected estimashift estimation. Since compared to tion accuracy will be better by a factor of the single-burst interferogram case. An elegant method for mutual azimuth shift estimation based on the so-called spectral diversity algorithm is proposed in [24]. It exploits the fact that the phase offset between the interferograms formed from different looks is proportional to the azimuth registration error. Since in burst-mode interferometry the looks are already available, spectral diversity is easily applicable. E. Interpolation for Image Coregistration Resampling of the slave image for coregistration with respect to the master image requires interpolation. A multipleburst image can be interpolated in the same way as strip-map and sampling data because its average spectral density frequency PRF are the same as in the strip-map case. The azimuth interpolation of single-burst images, however, requires some care, since the time variance of the burst image spectrum must be considered. Standard interferometric processing systems assume a constant azimuth center frequency (Doppler centroid), while in burst-mode data the look center frequency varies linearly with azimuth. Therefore, an azimuth-variant interpolation kernel must be used. An efficient interpolator for single-burst images is derived in of a point the following. According to (16), the response has a linear phase whose slope is proportional scatterer at to . To a first approximation, this looks as if a gross quadratic phase were superimposed on the burst image. If we compensate for that quadratic phase, the spectra will be shifted toward zero frequency and become azimuth-invariant. Without loss of gen. Then erality, we may assume that we process burst FM As a first step, we multiply the burst image by resulting in (38) FM , FM FM FM (39) Now the linear phase in the point response is gone, and its spectrum is of low-pass type. The residual quadratic phase FM , however, broadens the spectrum. Using as the equivalent width of the point response, the bandwidth increase is FM (40) This increase of spectral width must be considered when choosing the sampling frequency PRF of the burst image. In the RADARSAT example presented in Section VII HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY (FM 2000 Hz/s), the burst bandwidth is in the order of 100 Hz and, hence, increases by 20 Hz. Once we have down-modulated the azimuth-variant spectra by the quadratic phase multiply, we can apply a standard low-pass interpolator to map the time coordinate to the one , which is more or less a simple of the master image: shift. Finally, we compensate for the gross quadratic phase (properly mapped to the master coordinates) by multiplication FM . with The problem of azimuth-variant band-pass interpolation can be avoided also, if the slave image is processed (or reprocessed) such that the necessary shift operation is performed in the processor. This is done most conveniently, e.g., by introducing linear phase functions in the range-Doppler domain. The ECS algorithm (see Section V-D3 and [7]) further allows a straightforward implementation of a linear azimuth scaling factor by properly manipulating the chirp functions involved [24]. F. Variation of Coherence With Varying SNR We do not correct for scalloping, and we obtain a varying signal-to-noise ratio (SNR) in the azimuth direction [25]. This variation might also be seen in the phase or coherence images, since the coherence depends on the SNR of the SAR images [21], [26]. With our dataset, however, this effect is negligible, since temporal decorrelation dominates. G. Azimuth Spectral Shift A mutual azimuth spectral shift in SAR images is a consequence of an azimuth terrain angle or converging orbits [6], [20]. The azimuth fringe frequency is given by the following equation [6]: Hz (41) (the perpendicular baseline), (look angle of the with (azimuth terrain angle). For RADARSAT at radar), and a look angle of 40 and a perpendicular baseline of 100 m, we find that the terrain angle must be as high as 22 for a fringe frequency in the order of a tenth of the burst bandwidth. Hence, for our dataset this effect is negligible. However, for the very small bandwidth of the ENVISAT Global Monitoring mode, the azimuth spectral shifts are significant and should be compensated [6]. H. Beam Alignment A ScanSAR dataset can comprise 2–5 beams as planned for ENVISAT/ASAR operation [3]. The overlap area can be used for calibration of the ScanSAR data as described in [27], and in case of swath interferogram combination, it can be used for beam coregistration verification and mutual phase offset determination. After careful ScanSAR dataset coregistration and interferogram formation, there are still tiny misregistrations (in the order of 1/100 sample) that lead, together with a high Doppler centroid, to slowly varying phase errors. These are usually accounted for by suitable orbit trimming. However, the misregistrations lead to a mutual phase offset in the overlap area that has to be measured and compensated before beam combination. 1931 Note that orbit trimming accounts for both beams, while the residual misregistrations may be different in the individual beams. In addition, the range fringe frequency will introduce a phase offset in the overlap area due to mutual misregistration of the beam interferograms [28]. The mentioned phase offset effects can be summarized by the following equations: PRF az az az (42) rg rg rg (43) and RSF In (42) and (43), the spectral center frequencies are the Doppler and the center of the range spectrum centroid frequency (range spectrum off-set frequency [see(45)]. They transform the residual misregistrations az ( az ) and rg ( rg ) for beam 1 (beam 2) into a phase error, e.g., see [29]. and The other contributions from the fringe frequencies occur due to the swath interferogram misalignments rg and az in range and azimuth, respectively. For the dataset used, by far the most significant contribution to phase error is azimuth misalignment of the ScanSAR PRF images, since the Doppler centroid is very high, 6.0 cycles/sample. By contrast, the gross azimuth fringe frequency (converging orbits) impact is negligible ( 10 cycles/sample). The range frequencies are in the order of 0.2 cycles/sample. To measure beam alignment, we used multiple coherent burst images of either dataset (Table I). Since the spectra of the complex beam signals are nonoverlapping, and hence uncorrelated, we measured the shifts on detected images. For our particular RADARSAT dataset, we used several hundred patches and found that the beams are well aligned in azimuth. However, a shift of 0.15 0.02 samples is present in the range direction. After resampling the beam 2 interferogram, we measured a phase offset of 3.11 rad (with a standard deviation of 1.47 rad) and subtracted it from the beam 2 interferogram before combining the beam interferograms. The interferogram pixels were added coherently in the overlap area. The differential phase of the swath interferograms in the overlap area (Fig. 12) shows no systematic effects such as trends or structure from topography originating from a mutual misregistration. This implies that no azimuth-dependent intrabeam coregistration phase errors show up in the differential phase, and it shows that interbeam coregistration is sufficiently accurate, so that no topographic artifacts are visible. Finally, we obtained a full-range interferogram by beam combination. The interferogram phase and amplitude are illustrated in Fig. 13. It covers an impressive area of approximately 110 km in azimuth and 350 km in range. After burst image mosaicking, coherence information [see (25)] is not accessible anymore. The following phase stability measure was used instead: (44) 1932 Fig. 16. IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 Comparison of different DEMs (GLOBE, DTED-1, DTED-2, ScanSAR) for the area (35 km The result for the combined interferogram is shown in Fig. 14. As expected, we observe a reduction of phase variance in the overlap area. This is further evidence that remaining tiny intrabeam azimuth misregistrations do not result in azimuth-dependent phase distortions in the individual beam interferograms. I. Range Spectrum Shift of RADARSAT Data Since RADARSAT is not operated in yaw steering mode, high squint angles occur [9], [11]. High squint angles result in an off-zero range spectrum center frequency according to the following equation [11], [28]–[30]: (45) . This offset varies considerably from near range to far range, from 0.95 MHz to 3.8 MHz, due to the high Doppler centroid variation (Fig. 6). Since the bandwidth of the dataset is only 11.58 MHz, the center frequency of the spectrum is significantly shifted away from zero and complicates spectral shift filtering and resampling. J. Orbit Correction RADARSAT orbit data have very low accuracy; therefore, orbit correction and baseline estimation become necessary [11], [31]. The along- and circular across-track accuracies are given in [31] as 100 m and 20 m, respectively. Orbit correction was split into two tasks. First, the primary channel orbit was corrected for shifts in slant range and azimuth 2 35 km) marked in Fig. 15. direction. Second, the baseline length and angle were optimized, and the secondary channel orbit was corrected. The timing shift for the primary channel orbit was estimated using an interferogram simulated from a high-quality DEM (DTED-2, 25-m sampling grid). For this task, usually ground control points such as corner reflectors or transponders are used. However, for the considered region, no ground control points were available. After maximizing the peak of the differential interferogram spectrum (measured – simulated) in rough terrain, i.e., minimizing the fine structures on the differential phase, we found a shift of 310 ns in range and 4.87 ms in azimuth. Baseline can be estimated by minimizing the difference between a simulated and the measured interferogram. In order to avoid phase unwrapping in advance of baseline optimization (low coherence, Grand Canyon, and mountainous areas), we proceeded as follows. We simulated the interferometric phase and in the for several baseline length and angle settings neighborhood of the initial interferometer configuration 167 m and 159 . For this task, we used a DTED-2 DEM (25-m sampling grid), since we did not want to blame ScanSAR Interferometry for the bad orbit of RADARSAT. We generated a matrix of differential or flattened ScanSAR interferograms and considered the corrected baseline optimum when we obtain an overall flat phase. For this kind of baseline optimization, the wide range extent of the ScanSAR data is favorable, since it limits the space of possible correction parameter vectors , ) that correct for the smooth phase ( function on the difference phase. We obtained 4.22 m, 0.0075 rad for the baseline error estimate. HOLZNER AND BAMLER: BURST-MODE AND SCANSAR INTERFEROMETRY 1933 After baseline estimation (Section VI-J) we subtract an interferogram simulated from the GLOBE DEM prior to phase noise smoothing and phase unwrapping. For phase filtering, we use a Gaussian low-pass filter with a bandwidth that we matched to the fringe frequency distribution of a representative area in the interferogram. This improves the unwrapping performance of the applied minimum-cost-flow algorithm [32]. Fig. 15 shows the final ScanSAR 75–m resolution DEM [33]. Through the combination with GLOBE, the final result contains also information of the coarse DEM in low coherence areas (dark in Fig. 14). These areas are restricted to extreme slopes and severe temporal decorrelation. The DEM is compared to a high-quality DTED-2 (25-m grid). In flat areas, we find a height standard deviation of about 3–5 m. This result matches well the expectations from coherence, which varies from 0.72–0.85 in such regions. Fig. 16 shows a comparison of the ScanSAR DEM with several other DEMs. The area for comparison has an extent of 35 km 35 km and altitudes ranging from 640–1860 m. The other DEMs are GLOBE, DTED-1, and DTED-2, available at sampling grids of 1 km, 100 m, and 25 m, respectively. The ScanSAR DEM in the lower right corner certainly improves the GLOBE and even adds detail to the DTED-1. It is remarkable how distorted the DTED-1 is for the chosen area around Las Vegas. The DTED-2 serves as the reference in this comparison. The histograms of the height differences of the GLOBE, DTED-1, and ScanSAR DEM with respect to the reference DTED-2 are shown in Fig. 17. The 1-km GLOBE DEM appears to perform well, since the chosen area contains sufficiently large patches of flat terrain. Also, a visual comparison suggests that the GLOBE DEM of this area had probably been produced from the DTED-2 data. The band-like artifacts in DTED-1 result in a bimodal error histogram. Besides that, the error of the ScanSAR DEM is much less than that of DTED-1, and its visually perceptible resolution is much better and resembles more DTED-2 than DTED-1. VIII. CONCLUSION (d) Fig. 17. Histograms of the height differences (a) GLOBE—DTED-2, (b) DTED-1—DTED-2, and (c) ScanSAR—DTED-2. VII. SCANSAR DEM EXAMPLE In this section, we describe the last steps of the processing of the ScanSAR interferometric data, the resulting DEM, and a comparison to other available DEMs of the test site. ScanSAR will be increasingly used in future spaceborne SAR systems. ScanSAR interferometry is a complex task because 1) the properties of the involved signals are quite different from those of conventional SARs and 2) some of the approximations accepted for standard InSAR processing have to be revised due to the large swaths covered by ScanSAR. This paper gives a complete overview of the interferometric properties of ScanSAR signals and their consequences for processing. The different processing algorithms we have introduced and discussed should allow the reader to choose the one that is most efficiently integrated into an existing strip-map InSAR processing chain. The step-by-step recipe-like explanation of processing a RADARSAT ScanSAR data pair to a large DEM included descriptions of many additional precautions and tricks that have to be considered in ScanSAR interferometry. It was shown that DEMs of at least DTED-1 quality can be generated by RADARSAT repeat-pass ScanSAR interferometry in the case of moderate terrain relief and sufficiently high temporal coherence. ACKNOWLEDGMENT The authors would like to thank B. Schättler, H. Breit, U. Steinbrecher, A. Moreira, and J. Mittermayer (all of DLR) 1934 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 40, NO. 9, SEPTEMBER 2002 for their contributions to the ScanSAR processing software; M. Eineder (DLR) for helpful technical discussions and for making available an efficient interferometric phase simulator; W. Knöpfle (DLR) for mosaicking 550 DTED-2 DEM tiles and for his support with geocoding tools; and I. Cumming (University of British Columbia, Vancouver) for sharing his experience and advice. REFERENCES [1] K. Tomiyasu, “Conceptual performance of a satellite borne, wide swath synthetic aperture radar,” IEEE Trans. Geosci. Remote Sensing, vol. GE-19, pp. 108–116, 1981. [2] R. K. Moore, J. P. Claassen, and Y. H. Lin, “Scanning spaceborne synthetic aperture radar with integrated radiometer,” IEEE Trans. Aerosp. Electron. Syst., vol. AES-17, pp. 410–420, 1981. [3] S. Karnevi, E. Dean, D. J. Q. Carter, and S. S. Hartley, “Envisat’s advanced synthetic aperture radar: ASAR,” ESA Bull., vol. 76, pp. 30–35. [4] I. G. Cumming, Y. Guo, and F. Wong, “Analysis and precision processing of RADARSAT ScanSAR data,” in Proc. Geomatics in the Era of RADARSAT, Ottawa, ON, Canada, 1997. [5] R. Bamler and M. Eineder, “ScanSAR processing using standard high precision SAR algorithms,” IEEE Trans. Geosci. Remote Sensing, vol. 34, pp. 212–218, Jan. 1996. [6] A. M. Guarnieri and C. Prati, “ScanSAR focusing and interferometry,” IEEE Trans. Geosci. Remote Sensing, vol. 34, pp. 1029–1038, July 1996. [7] A. Moreira, J. Mittermayer, and R. Scheiber, “Extended chirp scaling algorithm for air- and spaceborne SAR data processing in stripmap and ScanSAR image modes,” IEEE Trans. Geosci. Remote Sensing, vol. 34, pp. 1123–1136, Sept. 1996. [8] R. Lanari, S. Hensley, and P. A. Rosen, “Chirp z -transform based SPECAN approach for phase-preserving ScanSAR image generation,” Proc. Inst. Elect. Eng., Radar, Sonar Navig., vol. 145, pp. 254–261, Oct. 1998. [9] R. K. Raney, A. P. Luscombe, E. J. Langham, and S. Ahmed, “RADARSAT,” Proc. IEEE, vol. 79, pp. 839–849, June 1991. [10] RSI. (1999) RADARSAT Data User Guide. RADARSAT International, Richmond, BC, Canada. [Online]http://www.rsi.ca/resources/education/handbook.htm. [11] D. Geudtner, P. W. Vachon, K. E. Mattar, B. Schättler, and A. L. Gray, “Interferometric analysis of RADARSAT strip-map mode data,” Can. J. Remote Sens., vol. 27, pp. 95–108. [12] R. Bamler, “A comparison of range-Doppler and wavenumber domain SAR focusing algorithms,” IEEE Trans. Geosci. Remote Sensing, vol. 30, pp. 706–713, July 1992. [13] R. K. Raney, H. Runge, R. Bamler, I. G. Cumming, and F. H. Wong, “Precision SAR processing using chirp scaling,” IEEE Trans. Geosci. Remote Sensing, vol. 32, pp. 786–799, July 1994. [14] A. M. Guarnieri and P. Guccione, “Optimal “focusing” of low resolution ScanSAR,” IEEE Trans. Geosci. Remote Sensing, vol. 39, pp. 672–683, Mar. 2001. [15] I. G. Cumming, P. F. Kavanagh, and M. R. Ito, “Resolving the Doppler ambiguity for spaceborne synthetic aperture radar,” in Proc. IGARSS, Zürich, Switzerland, 1986, pp. 1639–1643. [16] R. Bamler, D. Geudtner, B. Schättler, U. Steinbrecher, J. Holzner, J. Mittermayer, H. Breit, and A. Moreira, “RADARSAT SAR interferometry using standard, fine, and ScanSAR modes,” in Proc. Radarsat ADRO Final Symp., Montreal, QC, Canada, 1998. [17] U.S. Geological Survey, Digital Elevation Models, Data Users Guide. Reston, VA: U.S. Geological Survey, 1993. [18] I. G. Cumming, Y. Guo, and F. Wong, “A comparison of phase-preserving algorithms for burst-mode SAR data processing,” in Proc. IGARSS, Singapore, 1997, pp. 731–733. [19] H. Breit, B. Schättler, and U. Steinbrecher, “A high-precision workstation-based chirp scaling SAR processor,” in Proc. IGARSS, Singapore, 1997. [20] H. A. Zebker and J. Villasenor, “Decorrelation in interferometric radar echoes,” IEEE Trans. Geosci. Remote Sensing, vol. 30, pp. 950–959, Sept. 1992. [21] R. Bamler and P. Hartl, “Synthetic aperture radar interferometry,” Inv. Prob., pp. R1–R54, 1998. [22] I. S. Reed, “On a moment theorem for complex Gaussian processes,” IRE Trans. Inform. Theory, vol. IT-8, pp. 194–195, Apr. 1962. [23] R. Bamler, “Interferometric stereo radargrammetry: Absolute height determination from ERS-ENVISAT interferograms,” in Proc. IGARSS, Honolulu, HI, 2000. [24] R. Scheiber and A. Moreira, “Co-registration of interferometric SAR images using spectral diversity,” IEEE Trans. Geosci. Remote Sensing, vol. 38, pp. 2179–2191, Sept. 2000. [25] R. Bamler, “Optimum look weighting for burst-mode and ScanSAR processing,” IEEE Trans. Geosci. Remote Sensing, vol. 33, pp. 722–725, May 1995. [26] H. A. Zebker and R. M. Goldstein, “Topographic mapping from interferometric synthetic aperture radar observations,” J. Geophys. Res., vol. 91, pp. 4993–4999. [27] A. P. Luscombe, “Using the overlap regions to improve ScanSAR calibration,” in Proc. CEOS SAR Calibration Workshop, Noordwijk, The Netherlands, 1993, pp. 341–346. [28] R. Bamler and J. Holzner, “Processing techniques for repeat-pass ScanSAR interferometry,” in Proc. EUSAR 2000, Munich, Germany, 2000, pp. 719–722. [29] M. Bara, R. Scheiber, A. Broquetas, and A. Moreira, “Interferometric SAR signal analysis in the presence of squint,” IEEE Trans. Geosci. Remote Sensing, vol. 38, pp. 2164–2178, Sept. 2000. [30] C. Prati, F. Rocca, A. M. Guarnieri, and E. Damonti, “Seismic migration for SAR focusing: Interferometrical applications,” IEEE Trans. Geosci. Remote Sensing, vol. 28, pp. 627–640, July 1990. [31] H. Rufenacht, R. J. Proulx, and P. J. Cefola, “Improvement of RADARSAT image localization,” in Proc. Geomatics in the Era of RADARSAT, Ottawa, ON, Canada, 1997. [32] M. Costantini, “A novel phase unwrapping method based on network programming,” IEEE Trans. Geosci. Remote Sensing, vol. 36, pp. 813–821, May 1998. [33] A. Roth, “GEMOS-A system for the geocoding and mosaicking of interferometric digital elevation models,” in Proc. IGARSS, Hamburg, Germany, 1999. Jürgen Holzner (S’02) was born on August 9, 1973. He received the Diploma degree in data and information engineering from the Georg-Simon-OhmFachhochschule University of Applied Sciences, Nuremberg, Germany, in 1997. He is currently pursuing the Ph.D. degree at the University of Edinburgh, Edinburgh, U.K. In 1997, he joined the German Aerospace Centre (DLR), Oberpfaffenhofen. He has worked since then on processing techniques for SAR interferometry. The main projects he worked on included differential interferometry for subsidence monitoring, RADARSAT-1 ScanSAR interferometry, evaluation of SAR interferometry-derived digital elevation models (DEMs), and contributions to the SRTM interferometric processor. His current research interests are in ENVISAT IASAR alternating polarization mode interferometry, baseline optimization, DEM evaluation, and comparison using multiresolution methods, as well as ScanSAR processing algorithms and spectral estimation algorithms. Richard Bamler (SM’00) was born on February 8, 1955. He received the Diploma degree in electrical engineering, the Eng. Dr. degree, and the “habilitation” in the field of signal and systems theory in 1980, 1986, and 1988, respectively, from the Technical University of Munich, Munich, Germany. He was with the Technical University of Munich during 1981 and 1989 working on optical signal processing, holography, wave propagation, and tomography. He joined the German Aerospace Center (DLR), Oberpfaffenhofen, in 1989, where he is currently Director of the Remote Sensing Technology Institute. Since then he and his group have been working on SAR signal processing algorithms (ERS, SIR-C/X-SAR, RADARSAT, SRTM, ASAR), SAR calibration and product validation, SAR interferometry, phase unwrapping, oceanography, estimation theory, model-based inversion methods, parameter retrieval methods for atmospheric spectrometers (GOME, SCIAMACHY, MIPAS), content-based image query systems, and data mining for remote sensing archives. In early 1994, he was a Visiting Scientist at the Jet Propulsion Laboratory, Pasadena, CA, in preparation of the SIC-C/X-SAR missions, where he worked on algorithms for the SIR-C ScanSAR, along-track interferometry, and azimuth tracking modes. His current research interests are in algorithms for optimum information extraction from remote sensing data with emphasis on SAR. He is the author of a textbook on multidimensional linear systems.