LINEAR COMBINATIONS AND SUBSPACES
advertisement

CS131
Part II, Linear Algebra and Matrices
CS131 Mathematics for Computer Scientists II
Note 5
LINEAR COMBINATIONS AND SUBSPACES
Linear combinations. In R2 the vector (5, 3) can be written in the form
(5, 3) = 5(1, 0) + 3(0, 1) and also in the form (5, 3) = 1(2, 0) + 3(1, 1). In
each case we say that (5, 3) is a linear combination of the two vectors on
the right hand side.
If u, v ∈ R2 and α, β ∈ R, then a vector of the form αu + βv is a linear
combination of u and v .
Problem. Express the vector (6, 6) as a linear combination of (0, 3) and
(2, 1).
Solution. We want to find numbers α and β with
(6, 6) = α(0, 3) + β(2, 1).
Now from the properties of vectors:
(6, 6) = α(0, 3) + β(2, 1) ⇔ (6, 6) = (2β, 3α + β)
⇔ 2β = 6 and 3α + β = 6
⇔ β = 3 and α = 1
so we have (6, 6) = 1(0, 3) + 3(2, 1).
We can similarly define linear combinations of more than two vectors and
of vectors in Rn .
If u 1 , u 2 , . . . , u m are vectors in Rn and α1 , α2 , . . . , αm are real numbers, then
any vector of the form
α1 u 1 + α2 u 2 + · · · + αm u m
is called a linear combination of u 1 , u 2 , . . . , u m .
Problem. Express the vector (3, 0) as a linear combination of the vectors
(1, 1), (1, 0) and (1, −1) in two different ways.
5–1
Solution. We have
(3, 0) = α(1, 1) + β(1, 0) + γ(1, −1) ⇔ (3, 0) = (α + β + γ, α − γ)
⇔ α + β + γ = 3 and α − γ = 0
⇔ β = 3 − 2γ, α = γ.
Choosing any value for γ then determines the values of α and β and gives us
a linear combination. There are infinitely many choices of γ and therefore
infinitely many ways of writing (3, 0) as a linear combination of the three
vectors.
We are asked for only two so to make things easy we can take γ = 0 and
γ = 1 giving
(3, 0) = 0(1, 1)+3(1, 0)+0(1, −1) and (3, 0) = 1(1, 1)+1(1, 0)+1(1, −1).
Examples of linear combinations.
(1) A linear combination of a single vector v is defined as a multiple αv
(α ∈ R) of v .
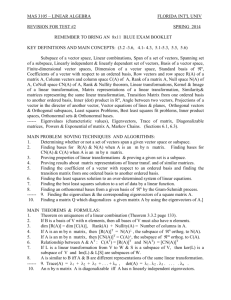
(2) In R3 if u and v are not parallel, then αu + βv represents a vertex of a
parallelogram having αu and βv as sides. Hence a linear combination of u
and v is a vector in the plane containing u, v and 0.
Some linear combinations of u and v in R3 :
αu + βv BM
> αu + βv
v O
u
(α, β > 0)
B
v αu + βv
-
O
v
B
u
(0 < α, β < 1)
B
B B
O
u
-
(α < 0 < β)
Problem. Let u = (1, 0, 3), v = (0, 2, 0) and w = (0, 3, 1)
(i) Find the linear combination 2u + 3v + 4w
(ii) express (1, 5, 4) as a linear combination of u, v and w
(iii) Can (1, 5, 4) be expressed as a linear combination of u and v ?
5–2
Solution. (i) 2u + 3v + 4w = (2, 0, 6) + (0, 6, 0) + (0, 12, 4) = (2, 18, 10).
(ii) We have
(1, 5, 4) = αu + βv + γw ⇔
⇔
⇔
⇔
(1, 5, 4) = α(1, 0, 3) + β(0, 2, 0) + γ(0, 3, 1)
(1, 5, 4) = (α, 2β + 3γ, 3α + γ)
α = 1, 2β + 3γ = 5, 3α + γ = 4
α = 1, γ = 1, β = 1
so (1, 5, 4) = (1, 0, 3) + (0, 2, 0) + (0, 3, 1).
(iii) We have
(1, 5, 4) = αu + βv ⇔ (1, 5, 4) = α(1, 0, 3) + β(0, 2, 0) = (α, 2β, 3α)
⇔ α = 1, 2β = 5, 3α = 4
But we cannot have both α = 1 and 3α = 4 so these equations cannot be
solved for α and β. Hence (1, 5, 4) cannot be written as a linear combination
of u and v .
Span. If U = {u 1 , u 2 , . . . , u m } is a finite set of vectors in Rn , then the span
of U is the set of all linear combinations of u 1 , u 2 , . . . , u m and is denoted
by span U . Hence
span U = {α1 u 1 + α2 u 2 + · · · + αm u m | α1 , α2 , . . . , αm ∈ R}
Examples.
(1) If U = {u} contains just a single vector, then
span {u} = {αu | α ∈ R} is the set of all multiples of u.
(2) In R2 if U = {(1, 0), (0, 1)} then the span of U is R2 . To see this
note that we can write an arbitrary vector (x , y) in R2 as a linear
combination of (1, 0) and (0, 1) as follows: (x , y) = x (1, 0) + y(0, 1).
(3) In R3 the span of the set {(1, 0, 0), (0, 1, 0), (0, 0, 1)} is R3 .
(4) In R3 let u = (1, 0, 1) and v = (2, 0, 3). Then
αu + βv = α(1, 0, 1) + β(2, 0, 3) = (α + 2β, 0, α + 3β)
so any linear combination of u and v has 0 for its middle component.
In fact any vector with middle component 0 is a linear combination
of u and v . To see this note that for any x , z ∈ R
(x , 0, z ) = αu + βv ⇔
⇔
⇔
⇔
(x , 0, z ) = α(1, 0, 1) + β(2, 0, 3)
(x , 0, z )) = (α + 2β, 0, α + 3β)
α + 2β = x , α + 3β = z
β = z − x , α = 3x − 2z
5–3
giving
(x , 0, z ) = (3x − 2z )u + (z − x )v
so any vector whose middle component is 0 is in span {u, v }. Hence
span {u, v } = {(x , 0, z ) | x , z ∈ R}.
Geometrically this is the set of all points whose y-coordinate is 0
i.e. the xz -plane.
(5) In general, if u and v are not parallel, then the span of {u, v } is the
plane determined by the three points u, v and 0.
Subspace. A subspace of Rn is a nonempty subset S of Rn with the following properties:
(1) u, v ∈ S ⇒ u + v ∈ S ;
(2) u ∈ S , λ ∈ R ⇒ λ u ∈ S .
Thus a subspace is a set which is closed under addition and scalar multiplication. It follows by induction on m that if S is a subspace and
u 1 , u 2 , . . . , u m ∈ S then any linear combination of u 1 , u 2 , . . . , u m also
belongs to S .
We always have two simple examples of subspaces. The set {0} consisting
of just the zero vector is a subspace of Rn . The set Rn itself is a subspace
of Rn .
Problem. In each of the following cases determine if the set S is a subspace
of Rn .
(1) S = {(x , y, 0) | x , y ∈ R} ∈ R3 ;
(2) S = {(1, 1)} ∈ R2 ;
(3) S = {(x , y) | x 2 + y 2 ≤ 1} ∈ R2 .
Solution. (1) To prove this is a subspace we need to show that the sum of
two vectors in S also belongs to S and also that any multiple of a vector in S
also belongs to S . Let u, v ∈ S then we have u = (a, b, 0) and v = (c, d , 0)
for some a, b, c, d ∈ R. Now
u + v = (a, b, 0) + (c, d , 0) = (a + c, b + d , 0)
which belongs to S . Also for any λ ∈ R
λ u = λ(a, b, 0) = (λ a, λ b, 0) ∈ S .
This proves that S is a subspace.
(2) The set S = {(1, 1)} is not a subspace of R2 since for example we have
5–4
(1, 1) ∈ S but the multiple 2(1, 1) = (2, 2) does not belong to S .
(3) The set {(x , y) | x 2 + y 2 ≤ 1} is not a subspace since, for example, we
have u = (1, 0) ∈ S and v = (0, 1) ∈ S but u + v = (1, 1) does not belong
to S since 12 + 12 = 2 6≤ 1.
Properties of Subspaces
(1) Every subspace of Rn contains the zero vector.
(2) If U is a nonempty finite subset of Rn then the span of U is a subspace
of Rn and is called the subspace spanned or generated by U .
The first property of a subspace listed above is often useful for showing that
a certain set cannot be a subspace. For example the set {(1, 1)} is not a
subspace of R2 since it does not contain the zero vector.
ABSTRACT
Content Linear combinations, definitions, span, subspace, properties of subspaces.
In this Note linear combinations and subspaces are defined as well as the important concept of span. These
entities appear frequently in areas such as linear algebra and they form an important part of the theory
of Least Squares approximation.
History
The German mathematician Hermann Grassman (1809-1877) was the first to introduce the ideas of linear
combinations, linear independence, subspace, basis and dimension.
Grassman’s ideas derived from his attempts to translate geometric concepts about n-dimensional space
into the language of algebra without dealing with coordinates. Although his ideas were initially difficult
to understand, they have become important in fields such as vector analysis.
5–5