1. introduction - Microsoft Research
advertisement

Improving Retrieval Performance Using Region Constraints
Tao Wang
Yong Rui
Jia-Guang Sun
Dept of Computer Sci. and Tech.
Tsinghua University
Beijing 100084, P. R. China
Microsoft Research
One Microsoft Way
Redmond, WA 98052, USA
Dept of Computer Sci. and Tech.
Tsinghua University
Beijing 100084, P. R. China
wangtao72@263.net
yongrui@microsoft.com
sunjg@ mail.tsinghua.edu.cn
ABSTRACT
There are two possible ways to narrow down the semantic gap
difficulty we are facing in image retrieval. One is to use relevance
feedback to leverage users’ knowledge and the other is to develop
more expressive features and more accurate similarity models. In
this paper, we primarily focus on the visual feature and similarity
model aspect, but we also present our initial results of integrating
relevance feedback. Specifically, this paper proposes a constraintbased region matching approach to image retrieval. Unlike
existing region-based approaches where either individual regions
are used or only first-order constraints are modeled, the proposed
approach formulates the problem in a probabilistic framework and
simultaneously models both first-order region properties and
second-order spatial relationships for all the regions in the image.
We present a complete system that includes image segmentation,
local feature extraction, first- and second-order constraints, and
probabilistic region weight estimation. Furthermore, we discuss
how we can further improve the retrieval performance by
integrating a Wiener filter based relevance feedback. Extensive
experiments have been carried out on a large heterogeneous image
collection with 17,000 images. The proposed approach achieves
significantly better performance than the state-of-the-art
approaches.
Keywords
content-based image retrieval, region matching, probabilistic
weight estimation, relevance feedback, and similarity model.
1. INTRODUCTION
Content-based image retrieval (CBIR) is the process of retrieving
images based on visual features that are automatically extracted
from images. It has been one of the most active research areas in
computer science during the past decade. There exist rich
literature on CBIR, including QBIC [14], PhotoBook [16],
VisualSEEK [24], MARS [19], Netra [12], BlobWorld [1] and
SIMPLIcity [11], among many others. This is by no means a
complete list, but rather an illustration on how active this area has
been. For recent surveys on CBIR systems and techniques, refer to
Rui et al. [21] and Smeulders et al. [23].
Permission to make digital or hard copies of all or part of this work for
personal or classroom use is granted without fee provided that copies are
not made or distributed for profit or commercial advantage and that
copies bear this notice and the full citation on the first page. To copy
otherwise, or republish, to post on servers or to redistribute to lists,
requires prior specific permission and/or a fee.
Conference ’02, Dec. 1-6, 2002, Juan Les Pins, France.
Copyright 2002 ACM 1-58113-000-0/00/0000…$5.00.
Despite years of extensive research, assisting users to find their
desired images accurately and quickly is still an open problem.
The main challenge is the semantic gap between high-level
concepts users want and low-level features that we can extract.
According to a recent user study result [18], what average users
really want are systems that support queries based on high-level
concepts (e.g., an apple on a table), rather than low-level features
(e.g., 30% red color and a blob with vertical edges).
While closing the semantic gap is still a far cry given today’s
technology, there are two possible ways to narrow it down. One is
to introduce relevance feedback into the system and take
advantage of users’ knowledge to guide the search, e.g., [2] and
[20], and the other is to directly improve the similarity models and
features themselves used in the system. The combination of better
relevance feedback and better similarity models/features will bear
successful fruit. In this paper, we primarily focus on the similarity
model and visual features, but we also present our initial results
integrating the two.
In most existing systems, global features such as global color
histogram, texture and shape are used [14][24][20]. While they
are easy to implement, they often fail to narrow down the
semantic gap because of their limited description power. Local
features, on the other hand, have strong correlations with realworld objects. Compared with global features, local features
provide a big step towards semantic-based retrieval.
Existing local-feature-based approaches fall into three categories:
fixed-layout-based [26], salient-point-based [6][27] and regionbased approaches [1][7][9][13][29]. The region-based approach
so far has been the winning approach among various localfeature-based approaches. This approach first segments an image
into multiple regions that have high correlation with real-world
objects. Then the total similarity between two images is calculated
based on all the corresponding regions. Because of imperfect
image segmentation (e.g., over or under segmentation), care must
be taken when comparing two images. The Netra system compares
images based on individual regions [3][12]. Although queries
based on multiple regions are allowed, the retrieval is done by
merging individual single-region query results. This approach is
therefore less robust to imperfect segmentation. The SaFe system,
on the other hand, uses a 2D-string approach [25]. While this
system is more robust than Netra, it is sensitive to region shifting.
Xu et al. takes a different approach [30]. They represent visual
objects (e.g., cars) as composite nodes in a hierarchical tree
scheme. Compared with previous approaches, this approach is
more robust, but less generalizable to other domains. A more
recent technique, integrated region matching (IRM), is developed
by Li et al.[11]. This approach reduces the influence of inaccurate
S ( R1 , R2 ) i 1 j 1 wij S (ri , r j' )
segmentation by allowing a region to be matched to multiple
regions from another image. It, however, suffers from a greedy
algorithm when estimating inter-region weights, and does not take
into account the spatial relationship between regions in an image.
In this paper, based on spatial constrains between image regions, a
novel probabilistic region matching technique is presented.
Different from other approaches, we take into account not only
the first-order (e.g., region features) constraints but also the
second-order ones (e.g., spatial relationship between them). More
importantly, unlike other ad hoc approaches, our similarity model
between two images is based on a principled probabilistic
framework. The proposed approach achieves significantly better
retrieval performance than the best existing approaches.
Furthermore, we present a framework that incorporates Wiener
filter based relevance feedback into our region based image
retrieval.
The rest of the paper is organized as follows. For related work in
Section 2, we focus on the integrated region matching (IRM)
approach[11]. It is one of the best approaches available and the
one that we will compare against in this paper. In Section 3, we
give detailed descriptions of our proposed constraint-based region
matching (CRM) approach. In Section, we present a framework
that integrates Wiener filter relevance feedback into CRM. In
Section 5, extensive experiments over a large heterogeneous
image collection with 17,000 images are reported. Concluding
remarks are given in Section 6.
M
s.t.
M
N
i 1
j 1
N
wij 1
where weight wij indicates the importance of region pair ri and rj
with respect to the overall similarity. This region matching
scheme is illustrated in Figure 1. Every vertex in the graph
corresponds to a region in an image. If two regions ri and rj are
matched, the two vertices are connected by an edge with a weight
wij.
It becomes clear that estimating wij is a key step for the region
matching algorithm. IRM uses the “most similar highest priority”
(MSHP) principle to estimate wij, i.e., iteratively gives the largest
priority to the region pair having minimum distance. Let the
normalized importance of ri and rj be pi and pj, the following
constraints hold:
M
i 1
M
i 1
pi j 1 p j 1
(2)
(3)
N
wij p 'j ,
N
j 1
1.
2.
Initially, set the assigned region set L = { }. Let the
unassigned region set E = {(i,j) | i =1, 2, …, M; j=1, 2
,…,N}.
Choose the minimum dij for (i,j) E-L. Label the
corresponding (i, j ) as (i ' , j ' )
Among various existing region-based approaches discussed in
Section 1, IRM [11] is one of the best, and is the one we will
compare against in this paper. Compared with other approaches,
IRM is more accurate in similarity calculation and more robust to
imperfect image segmentation by allowing a region to be matched
to multiple regions from another image.
3.
min( pi ' , p' j ' ) wi ' j '
4.
If
5.
p i ' min( pi ' , p' j ' ) pi '
After image segmentation, the overall similarity between two
images can be calculated based on all the regions in the two
images. Let images 1 and 2 be represented by region sets R1 = {r1,
r2,…, rM} and R2 = {r1, r2, …, rN} respectively, shown in Figure
1, where M and N are the number of regions in the two images.
Let the similarity between regions ri and rj be S(ri, rj), where ri is
the ith region in R1 and rj is the jth region in R2. To increase region
matching’s robustness against inaccurate segmentation, a region
in one image can be matched by multiple regions from another
image. The total similarity between two images can therefore be
defined as the similarity between the two region sets S(R1,R2):
6.
p' j ' min( pi ' , p' j ' ) p' j '
r2
r3
…
w11 w12
r1
rM
r3
r4
r5 …
p i ' p ' j ' , set
wi ' j 0, j j ' ; otherwise set
wij ' 0, i i ' .
7.
L + { (i ' , j ' ) } L
8.
If
M
i 1
pi 0 and
N
j 1
p' j 0 , then go to Step 2;
otherwise stop.
In IRM, pi is defined as the area percentage of region ri in R1, pj
is the area percentage of region rj in R2, and dij is the distance
between ri and rj. While IRM makes a significant step in regionbased matching, its accuracy and robustness suffers from the fact
that it does not take into account the spatial relationships between
regions. In addition, it uses a greedy algorithm to estimate interregion weight wij, which again reduces the robustness of the
similarity model. For example, the greedy algorithm can easily be
trapped into local minimum, and all the subsequent weight
estimation becomes un-reliable (see Section 3.5).
3. CONSTRAINT-BASED REGION MATCHING (CRM)
wMN
r2
wij pi
The IRM approach can be summarized as follows:
2. RELATED WORK
r1
(1)
rN
Figure 1. region matching between region sets R1,R2
To improve the robustness of region matching, we propose a new
technique that depends on not only the region properties but also
the spatial relationships between regions. More importantly, it
formulates the weight estimation problem in a probabilistic
framework and solves the problem in a principled way. In the rest
of this section, we present detailed description of our system
including image segmentation, region feature extraction, first- and
second-order constraints, and probabilistic matching of regions
sets.
e
3.1 Image Segmentation
Image segmentation tries to divide an image into regions that have
strong correlations with real-world objects. Our goal in this paper
is not to achieve perfect segmentation, but rather to develop good
region matching techniques that are robust to imperfect
segmentation.
We use an improved region growing approach to segment images
based on HSV color histograms. The approach is summarized as
follows:
Use a Gaussian filter ( = 2) to smooth out image noise and
small texture effects.
Perform a pixel gradient operation, and use the local minima
as starting seeds.
Start growing regions around each of the starting seeds.
Neighboring pixels are examined and added to a region if
they are similar, in HSV color space, to the region and no
edges are detected between them.
(3) Shape feature: The shape feature is region’s eccentricity e,
which is the ratio of the minor axis length Imin and the major
axis length Imax of the best-fit ellipse of the region [10].
If the HSV color histograms of two adjacent regions are
similar, merge the two regions.
More sophisticated segmentation techniques can be used, e.g.,
Pavlidis and Liow[15], and Felzenszwalb et al. [4]. But that is
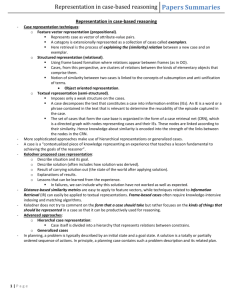
beyond the scope of this paper. An example segmentation result
is shown in Figure 2.
2
2
I min u 20 u 02 (u 20 u 02 ) 4u11
[0,1]
I max u u (u u ) 2 4u 2
20
02
20
02
11
where u
p ,q
( x x)
p
(6)
( y y ) q , and ( x , y ) is the center of
( x , y )region
the region. Given that regions may not have one-to-one
correspondence with real-world objects, litter benefit will be
gained by using more sophisticated shape feature, such as
region’s contour and its Fourier descriptor [5].
(4) Position feature: The position of the region is the normalized
region center:
O(
x y
, )
W H
(7)
where W and H are image width and height.
3.3 Regional and Spatial Constraints
Object and relationship modeling has been extensively studied for
the past three decades in spatial layout planning [17][8].
Pfefferkorn [17] defines three important components: (1) Objects.
Examples are tables and floor. (2) Specified areas. They encode
domain knowledge of the position of objects, e.g., floor is at the
bottom. (3) Spatial relationship constraints. For example, a table
is on top of a floor.
Because the first two constraints concern only about the
individual objects, we call them first-order constraints. Similarity,
we call the spatial relationship constraints second-order
constraints, as they involve two objects. Even though the above
concepts were first developed in spatial layout planning, they
apply equally well in image content modeling. Let ri, rk be regions
in image 1 and rj, rl be regions in image 2. The constraints and
their associated region similarities are defined as follows:
(1) Region property constraint
(a)
(b)
Figure 2. A landscape image (a) and its segmentation (b)
Color: The matched regions, i.e., ri, rj , should have the
similar colors.
S c (ri , r ' j ) exp( || C i C ' j || 2 / 2 c )
3.2 Region Features
After image segmentation, the color, size, shape and position
features of each region are extracted to represent the content of an
image. The spatial relationship between regions is not stored, as it
can be derived from the size, shape and position features.
(1) Color feature: The color feature of a region is its mean color
in HSV color space.
C (s * sin( h ), s * cos(h ), v )
(4)
Area of the region
Area of the image
(8)
where c controls the penalty of difference.
Shape: The matched regions, i.e., ri, rj , should have
similar basic shapes.
Se (ri , r ' j ) exp( || ei e j ||2 / 2 e2 )
(9)
where e controls the penalty of difference.
(2) Region position constraint
(2) Size feature: The size feature is represented by the area
percentage of the region to the whole image.
2
(5)
Position: The matched regions, i.e., ri, rj , can have
similar positions.
S p (ri , r ' j ) exp( || O i O' j || 2 / 2 p2 )
(10)
where p controls the penalty of difference.
S ( R1 , R2 ) i 1 j 1 wij S1 (ri , r j' )
M
(3) Spatial relationship constraint
s.t.
Orientation: The orientation of a pair of regions ri, rk in
image 1 should be similar to that of the pair of matched
regions rj, rl in another image2 (See Figure 4).
S o (ri , rk , r ' j , r ' l )
(
(O i O k ) (O' j O' l )
1) / 2
(11)
|| O i O k || || O' j O' l ||
Inside/outside: If ri is inside/ outside rk in image 1, the
matched region rj should be inside/outside rl in image
2.
S i (ri , rk , r ' j , r ' l )
(ri in/out rk ) XOR (r ' j in/out r ' l )
(12)
Size Ratio: The area ratio of a pair of regions ri, rk in
image 1 should be similar to the area ratio of the pair of
matched regions rj, rl in image 2.
S s (ri , rk , r ' j , r ' l )
(
( i , k ) ( ' j , 'l )
|| ( i , k ) || || ( ' j , ' l ) ||
1) / 2
(13)
The total similarity based on the first-order constraints, e.g., (8)(10), for two regions ri, rj is defined as:
S1 (ri , r ' j ) wc S c (ri , r ' j ) we S e (ri , r ' j )
w p S p (ri , r ' j )
(14)
s.t. wc we w p 1
Similarly, the total similarity based on the second-order
constraints, e.g., (11)-(13), is
S 2 (ri , rk , r ' j , r 'l ) wo S o ( ri , rk , r ' j , r 'l )
wi S i (ri , rk , r ' j , r 'l )
ws S s (ri , rk , r ' j , r 'l )
N
i1 j 1 wij 1
M
(16)
N
It is therefore clear that the weight wij plays an important role in
determining the overall similarity value. As discussed in Section
2, there are several problems with how IRM estimates the
weights. First, it ignores the second-order constraints. Second, it
uses a greedy search algorithm, which reduces matching
robustness. To address these issues, we cast the weight estimation
problem into a probabilistic framework and solve the problem in a
principled way.
Note that the similarity between two entities can be interpreted as
the probability of the two entities being similar. Note also that all
the similarities defined in (8) – (15) are in the range of [0, 1], and
can readily be used to estimate probabilities. Let x ~ y and
x y denote that x matches y based on the first-order and
second-order constraints, respectively. We therefore have
P(ri ~ r ' j ) S1 (ri , r ' j )
(17)
P(ri r ' j , rk r 'l | ri ~ r ' j , rk ~ r 'l )
(18)
S 2 (ri , rk , r ' j , r 'l )
where
stands for “can be estimated by”. That is, the
probability that ri matches rj in terms of the first-order constraints
can be estimated by S1(ri, rj). Similarly, the probability that ri
and rk match rj and rl in terms of the second-order constraints,
given ri matches rj and rk matches rl in term of the first-order
constraints, can be estimated by S2(ri, rk, rj, rl).
It is intuitive that a region pair that has high similarity should
receive high weight in the similarity model [11]. P ( ri ~ r ' j ,
ri r ' j ) is therefore a good estimate for wij. We have
wij Wij / i 1 j 1 Wij
M
N
Wij P(ri ~ r ' j , ri r ' j )
(15)
s.t. wo wi ws 1
k 1 l 1 P(ri ~ r ' j , rk ~ r ' l , ri r ' j , rk r ' l )
M
k 1 l 1 P(ri r ' j , rk r ' l | ri ~ r ' j , rk ~ r ' l )
M
k 1 l 1 S 2 (ri , rk , r ' j , r ' l ) P(ri ~ r ' j ) P(rk ~ r ' l )
M
3.4 Probabilistic Weight Estimation
The overall similarity between two region sets, thus two images, is
defined as follows:
N
P(ri ~ r ' j , rk ~ r ' l )
where wc, we, wp, wo, wi, and ws are proper weights.
For all the constraints (8)-(13), it is worth mentioning that they
are translation and scaling invariant, except (10). While it is
application and user dependent if the invariance is desired, our
proposed similarity model works in both cases. For example, it
can easily handle the invariance requirement by relaxing
constraint (10). Detailed experiments on the robustness of the
similarity model are reported in Section 4.5.
N
N
k 1 l 1 S 2 (ri , rk , r ' j , r ' l ) S 1 (ri , r ' j ) S 1 (rk , r ' l )
M
N
where in the above derivation we have used Bayes rule and the
independence assumption between region pairs ri and rj , and rk
and rl. Examining this new weight estimation technique, we can
see that it seamlessly integrates both first-order and second-order
constraints. More importantly, it avoids the greedy algorithm
used in IRM. Instead, it uses a principled way to estimate the
weights based on probabilities, which is more robust to inaccurate
image segmentation.
regions.
3.5 Illustrations and Simulations
In this sub-section, we illustrate the effectiveness of the proposed
CRM approach by using two synthetic images. Shown in Figure
3, image 2 is an over-segmented version of image 1, shifted 25%
to the right and scaled 25% down. To highlight CRM’s
probabilistic weight estimation framework and the second-order
constraints, we assign the same color to all the regions in the two
images. Let r0 and r0 represent the background regions in the two
images, Tables 1 and 2 show the estimated weights, based on
CRM and IRM respectively. The following observations can be
made:
Because CRM takes into account the second-order
constraints, it is much more robust to translation and scaling
changes. For example, in CRM, r1 is well matched to both
r1 and r2. But in IRM, r1 is not matched to r2 at all.
Because CRM estimates the weights using a probabilistic
framework, it is much less likely to be trapped into a local
minimum. For example, in CRM, even though other regions
pose distractions, r3 can still match well with r4. On the
other hand, IRM uses a greedy algorithm, i.e., MSHP, to
estimate the weights. It is therefore easily trapped into local
minima. For example, r3 is matched to r2 instead of r4
because of the local minimum created by the background
Similar results are obtained when we assign different colors to
different corresponding regions, e.g., assign red to regions r1 , r1 ,
and r2, and assign yellow to regions r3 and r4. The above
simulations clearly demonstrate the advantage of CRM over IRM.
4. RELEVANCE FEEDBACK
As discussed in Section 1, two important techniques can narrow
down the semantic gap in image retrieval. One is relevance
feedback and the other is more expressive features and more
accurate similarity models. In Section 3, we have presented in
detail how CRM supports a better image similarity model. In this
section, we will present our initial attempt to integrating the two,
i.e., a relevance feedback enhanced CRM.
Let R1 represent the region set in the query image and R2 represent
the region set of an image in the database. Refer to (16) – it is
clear that in Section 3’s definition of similarity, we have assumed
that all the regions in R1 are of equal importance to a user. This is
a reasonable assumption to start with, but in reality a user may
have different emphases on different regions. For example, he or
she may be more interested in some part of the image than the
other. This is where the relevance feedback can come into play.
Let’s first define a more generic similarity between the query
image and an image in the database:
S ( R1 , R2 ) i 1
M
r2
r1
r1 r2
α
α
r3
r0
r5
r0
Image 1
Image2
Figure 3. Two images with segmented region sets R1, R2.
Table 1. Estimated weights using CRM
r0
r1
r2
r3
r4
r5
r0
0.171
0.000
0.000
0.000
0.000
0.000
r1
0.000
0.087
0.060
0.025
0.024
0.014
r2
0.000
0.035
0.040
0.070
0.037
0.012
r3
0.000
0.028
0.042
0.034
0.056
0.044
r4
0.000
0.011
0.022
0.017
0.053
0.106
Table 2. Estimated weights using IRM
r0
r1
r2
r3
r4
r5
r0
0.790
0.000
0.000
0.000
0.000
0.000
r1
0.043
0.027
0.000
0.000
0.015
0.000
r2
0.014
0.000
0.000
0.014
0.000
0.000
r3
0.000
0.000
0.032
0.000
0.019
0.000
r4
0.000
0.000
0.000
0.012
0.000
0.024
N
j 1
qi wij S1 (ri , r j' )
i 1 qi si
M
r3
s.t.
r4
r4
M
i 1
qi 1,
(19)
M
N
i 1
j 1
wij 1
where the term qi models a user’s degree of interest on region i ,
and si is the aggregated similarity of region i. The retrieval system
can learn the interest weights qi using relevance feedback. It has
been proven in [28] that the adaptive least-mean-square (LMS)
Wiener filter outperforms other linear learning-based relevance
feedback techniques on a large-scale database. It has the
additional benefit of supporting on-line learning [28]. This is
particular useful in that when a new example arrives, the
algorithms can learn without starting from scratch.
Before we go into details of the LMS Wiener filter algorithm,
we’d like first to define some notations. Refer to Figure 4. X (n )
is the input signal to both the underlying system to be simulated
and our simulator – adaptive Winer filter. The output from the
underlying unknown system is d(n), and the output from the
Wiener filter is y (n) W (n) T X (n) . The difference between y(n)
and d(n) is the error signal e(n). Our goal is to use e(n) to adjust
the weights W (n ) such that the error is minimized. The LMS
Wiener filter algorithm can be summarized as follows:
(A)
Initialization:
Choose step size 0 2 , and set the filter coefficients to
W (0) [1 / M ,1 / M ,...,1 / M ]T
(B)
(20)
For each n = 1, 2, …, N feedback samples,
1.
Compute the distance y(n) based on the current
weights
(21)
y ( n) W T ( n) X ( n)
2.
Compute the error signal
3.
e( n ) d ( n ) y ( n )
(22)
Note that compared with standard Wiener filters, we
have an extra step to convert from the similarity to
distance d(n).
Compute the updated weights
W (n) W (n 1)
X (n)e(n)
T
a X ( n) X ( n)
(23)
Where a is a small positive constant to avoid
denominator to be 0.
Because real-world users want to retrieve images based on highlevel concepts, not low-level features (Rodden, K., et al[18]), the
ground truth we use in the experiments is based on high-level
categories. That is, we consider a retrieved image as a relevant
image only if it is in the same category as the query image. This is
a difficult task to tackle, but this is what users want, thus our
ultimate goal.
The Corel data set have also been used in other systems and
relatively high retrieval performance has been reported. However,
those systems only use pre-selected categories with distinctive
visual characteristics (e.g., cars vs. mountains).
In our
experiments, no pre-selection is made. We believe that only in
this manner can we obtain practical and useful evaluation.
In our specific context, we have
W [q1 , q 2 ,..., q M ]T ,
X [ s1 , s 2 ,..., s M ]T ,
d(n)= S(R1,R2).
5.2 Queries
The LMS Wiener filter relevance feedback algorithm is elegant in
theory, easy to implement and requires very little computation
[28]. Detailed experiments on the performance of this technique
are reported in Section 5.6.
5. EXPERIMENTS
To validate the efficacy of the relevance-feedback enhanced
CRM, in this section, we will carry out two sets of experiments
using large-scale real-world images. First, we will examine and
compare the retrieval performance of CRM against one of the best
existing approaches, IRM. We then compare the relevancefeedback enhanced CRM against the plain CRM.
5.1 Data Set
For all the experiments reported in this section, the Corel image
collection is used as the test data set. We choose this data set due
to the following considerations:
It is a large-scale data set. Compared with the data sets used
in some systems that contain only a few hundred images, the
Corel data set includes 17,000 images.
It is heterogeneous. Unlike the data sets used in some
systems that are all texture images or car images, the Corel
data set covers a wide variety of content from animals and
plants to natural and cultural images.
Corel professionals and there are 100 images in each
category.
Some existing systems only test a few pre-selected query images.
It is not clear if those systems will still perform well on other notselected images. To fairly evaluate the retrieval performance of
different techniques, we randomly generated 400 queries for each
retrieval condition. For all the performance data reported in this
section, they are the average of the 400 query results.
5.3 Performance Measures
The most widely used performance measures for information
retrieval are precision (Pr) and recall (Re) [22]. Pr is defined as
the number of retrieved relevant objects over the number of total
retrieved objects, say the top 20 images. Re is defined as the
number of retrieved relevant objects over the total number of
relevant objects in the image collection (in the case of Corel data
set, 99). The performance of an "ideal" system is to have both
Table 3. Retrieval performance comparison between
CRM and IRM with 400 queries on 17,000 images.
Precision
(percentage)
Return
top 20
Return
top 100
Return
top 180
CRM
17.30
9.83
6.91
IRM
14.06
5.87
4.95
Increase
23.04
67.46
39.60
It is professional-annotated. Instead of using the less
meaningful low-level features as the evaluation criterion, the
Corel data set has human annotated ground truth. The whole
image collection has been classified into many categories by
X (n)
System
Adaptive Filter
d(n)
y(n) e(n)
Figure 4. Human vision system model
+
Σ e(k)
Figure 5. Comparison between CRM and IRM. The
Solid curve represents CRM, and dashed curve
represents IRM.
high Pr and high Re. Unfortunately, Pr and Re are conflicting
Table 4. Retrieval performance comparison between
relevance feedback enhanced CRM and plain CRM
with 400 queries on 17,000 images.
Precision
(percentage)
Return
top 20
Return
top 100
Return
top 180
0 feedback
17.30
9.83
6.91
1 feedback
18.73
11.69
7.20
2 feedbacks
19.83
12.10
7.53
quite different spatial layout from the query image, but are still
returned as similar images.
5.5 Robustness of CRM
Images with similar content can be taken at quite different
conditions. An important criterion for a good similarity model is
therefore its robustness to different imaging conditions and image
alterations. We have performed extensive tests on this aspect and
a retrieval example is shown in Figure 8. The query images are
the original image (Figure 8(a)) and the altered images (Figure
8(b)-8(l)). The different imaging conditions include corruption by
40% Gaussion noise, sharpened 20%, blurred 20%, 25% less
saturated, 25% more saturated, brightened 20%, and darkened
10%. The image alterations include translation 25%, scaling up
40%, and rotation of 20 degrees. It can be seen that the proposed
CRM technique is robust to both different imaging conditions and
image alterations.
5.6 Relevance Feedback Enhanced CRM
Figure 9. Comparison between CRM with and
without feedback. The Solid curve represents 0
feedback, dashed curve represents 1 iteration of
feedback and dotted curve represents 2 iterations of
feedback.
criteria and can not be at high values at the same time. Because of
this, instead of using a single value for Pr and Re, the Pr(Re)
curve is normally used to characterize the performance of a
retrieval system.
5.4 Comparisons Between CRM and IRM
Table 3 compares the image retrieval results using CRM and
IRM, when the top 20, 100, and 180 most similar images are
returned. To better compare the two approaches, we also plot the
Pr(Re) curve for CRM and IRM in Figure 5. Because CRM
simultaneously takes into account both first-order constraints,
e.g., region properties and positions, and second-order constraints,
e.g., spatial relationships, it is more accurate in modeling image
content and more robust to imperfect image segmentation. It is
20% - 60% (in relative percentage) better than IRM in terms of
retrieval accuracy. Figures 6 and 7 show example comparisons
between CRM and IRM, where the top-left image is the query
image. In Figure 6, a sunset image is submitted as a query.
Because CRM models spatial relationships between regions, e.g.,
the sun is inside the lower part of the sky and the landscape is
underneath the sky, it achieves good retrieval results (see Figure
6(a)). On the other hand, IRM only models the first-order
constraints and uses a greedy weight-estimating algorithm. It
therefore does not have enough description power to distinguish
generic orange-color images (e.g., the first, third, fourth, fifth and
sixth images in the second row of Figure 6(b)) from the query
image, which has a well-defined inter-region spatial relationship.
Similar observations can be made in Figure 7. For example, the
third, fifth and sixth images in the second row of Figure 7(b) have
Table 4 shows the comparison between relevance feedback
enhanced CRM and plain CRM when the top 20, 100, and
180 most similar images are returned, and Figure 9 shows
their precision-recall curve after two iterations of relevance
feedback. Based on the table and figure, the following
observations can be made:
With more feedback iterations, the retrieval performance
increases.
The performance increase in the first iteration is the biggest.
This is important because users prefer to have as few
iterations as possible.
It is clear that combining relevance feedback with CRM is a good
direction to go, where relevance feedback leverages user’s
knowledge and CRM provides more expressive features and more
accurate similarity model. An example relevance feedback result
is shown in Figure 10.
6. CONCLUSIONS
In this paper, we have proposed a novel constraint-based region
matching approach to image retrieval. This approach is based on a
principled probabilistic framework and simultaneously models
both first-order region properties and second-order spatial
relationships. Simulations and real-world experiments show that
its retrieval performance is significantly better than a state-of-theart technique, i.e., IRM. Furthermore, we have presented our
initial results on how we can further improve the retrieval
performance by integrating a Wiener filter based relevance
feedback. As for our future work, we believe that both localfeature-based approaches, e.g., IRM and CRM, and relevance
feedback techniques are required to narrow down the semantic
gap in image retrieval. The local features provide good object
modeling power, and relevance feedback brings in users’
knowledge to guide the search. The combination of the two will
bear successful fruits. We are currently developing a unified
framework to integrate relevance feedback with CRM to provide
users with more accurate, robust and adaptive retrieval
experience.
7. ACKNOWLEDGMENTS
The first author wants to thank Prof. Wenping Wang for his
helpful comments and discussions about the paper. The first
author is supported in part by China NSF grant 69902004 and the
National Project 2001BA201A07. The Corel image set was
obtained from Corel and used in accordance with their copyright
statement.
Recognition using Dynamic Programming, IEEE trans
PAMI, vol.10, pp. 257-266, 1988.
[6] Gouet, V., and Boujemaa, N. Object-Based Queries Using
Color Points of Interest. Proc. of IEEE Workshop on
Content-Based Access of Images and Videos (CBAIVL),
Kauai, Hawaii, 2001.
[7] Kam, A. H., Ng, T.T., Kingsbury, N.G., and Fitzgerald, W.J.
REFERENCES
[1] Carson, C., Belongie, S., Greenspan, and H., Malik, J.
Region-based image querying, Proc. IEEE Workshop on
Content-Based Access of Image and Video Libraries, pp. 4249, 1997.
[2] Cox, I.J., Miller, M.L., Minka, T.P., Papathomas, T.V., and
Yianilos, P.N. The Bayesian image retrieval system,
Pichunter: theory, implementation, and psychophysical
experiments. IEEE Trans. on Image Processing, Vol. 9(3),
pp. 524 –524, 2000.
[3] Deng, Y., and Manjunath, B.S. An efficient low-dimensional
color indexing scheme for region-based image retrieval,
Proc. of IEEE Intl. Conf. on Acoustics, Speech, and Signal
Processing (ICASSP), pp. 3017-3020, 1999.
[4] Felzenszwalb, P. F., and Huttenlocher, D. P. Image
Content based image retrieval through object extraction and
querying, 2000. Proc. IEEE Workshop on Content-based
Access of Image and Video Libraries (CBAIVL), pp. 91-95,
2000.
[8] Kazuyoshi, H., and Fumio, M. Constraint-based approach for
automatic spatial layout planning, Proceedings of the 11th
Conference on Artificial Intelligence for Applications, Los
Angeles, CA, USA, pp. 38-45, 1995.
[9] Ko, B.C., Lee, H.S., Byun, H. Region-based image retrieval
system using efficient feature description, Proc. of 15th
International Conference on Pattern Recognition, vol.4, pp.
283-286, 2000.
[10] Leu, J.-G. Computing a shape moments from its boundary,
Pattern Recognition, vol.10, pp. 949-957, 1991.
segmentation using local variation, Proc. of IEEE Computer
Vision and Pattern Recognition, Santa Barbara, CA, USA,
pp. 98-104, 1998.
[11] Li, J., Wang, J.Z., and Wiederhold, G. IRM: Integrated
[5] Gorman, J.W., Mitchell,O.R., Kuhl, F.P. Partial Shape
[12] Ma, W.Y., and Manjunath, B.S. Netra: A Toolbox for
(a)
Region Matching for Image Retrieval. Proceedings ACM
Multimedia 2000, Los Angeles, CA, pp. 147-156, 2000.
(b)
Figure 6. Retrieving sunset images, where (a) uses CRM and (b) uses IRM.
(a)
(b)
Figure 7. Retrieving car images, where (a) uses CRM and (b) uses IRM.
navigation Large Image Database, Proc. of IEEE ICIP,
pp568-571, 1997.
organization by similarity assist image browsing, Proc. ACM
Compute-Human Interaction (CHI), pp. 190-197, 2001.
[13] Moghaddam, B., Biermann, H., and Margaritis, D. Image
[19] Rui, Y., Huang, T., and Mehrotra, S. Content-based image
retrieval with local and spatial queries, Proc. IEEE ICIP
2000,, Vol. 2, pp. 542-545, 2000.
retrieval with relevance feedback in MARS. Proc. IEEE Int.
Conf. on Image Processing, 1997.
[14] Niblack, W. et al. The QBIC project: querying images by
[20] Rui, Y., and Huang, T.S. Optimizing learning in image
content using color, texture and shape, In SPIE Proc, Storage
and Retrieval for Image and Video Databases, , San Jose,
vol. 1908, pp.1723-187, 1993.
retrieval. Proc. IEEE Int. Conf. on Computer Vision and
Pattern Recognition (CVPR2000), Vol. 1, pp. 236 –243,
2000.
[15] Pavlidis,T., and Liow,Y.T. Integrating Region Growing and
[21] Rui, Y., Huang, T.S., and Chang, S. F. Image retrieval:
Edge Detection. IEEE Trans Pattern Analysis and Machine
Intelligence, vol. 12(3), pp.225-133, 1990.
current techniques, promising directions and open issues,
Journal of Visual Communication and Image Representation
Vol. 10, pp.39-62, 1999.
[16] Pentland, A., Picard, R., and Sclaroff, S. Photobook:
Content-based manipulation of image databases. Int. J.
Comput. Vis., 18(3): pp. 233-254, 1996.
[22] Salton, G., and McGill, M. J. Introduction to modern
information retrieval, McGraw-Hill Book Company, New
York, 1982.
[17] Pfefferkorn, C. A heuristic problem solving design system
for equipment or furniture layouts, Communications of the
ACM, vol. 18 (5), pp.286-297, 1975.
[23] Smeulders, A. W. M., Worring, M., and Santini, S. Content-
[18] Rodden, K., Basalaj, W., Sinclair, D., and Wood, K. Does
based image retrieval at the end of the early years, IEEE
Trans. PAMI, Vol. 22(12), pp. 1349 -1380, 2000.
(a). Original image
(b). Shifted left 25%
(c). Scaled up 40%
(d). Rotated +20 degrees
(e). Rotated -20 degrees
(f). Corrupted by 40% Gaussian noise
(g). Sharpened by 20%
(h). Blurred by 20%
(i). 25% less saturated
(j). 25% more saturated
(k). Brightened by 20%
(l). Darkened by 10%
Figure 8. Illustration of CRM’s robustness to both different imaging conditions and image alterations.
(a)
(b)
(c)
Figure 10. An relevance feedback example with CRM. (a) is with no feedback, (b) is with one iteration of feedback, and (c) is
with two iterations of feedback.
[24] Smith, J.R., and Chang, S.F. VisualSEEK: A Fully
Automated Content-Based Image Query System, ACM
Multimedia 1996, Bostan MA, 1996.
[25] Smith, J.R., and Chang S.F. SaFe: a general framework for
integrated spatial and feature image search, IEEE First
Workshop on Multimedia Signal Processing, pp.301-306,
1997.
[26] Tian, Q., Wu, Y., and Huang, T. S. Combine user defined
region-of-interest and spatial layout for image retrieval, IEEE
International Conference on Image Processing, Vancouver,
BC, vol. 3, pp. 746-749, 2000.
[27] Tian, Q., Sebe, N., Lew, M. S., Loupias, E., and Huang, T. S.
Image Retrieval Using Wavelet-Based Salient Points, in
Journal of Electronic Imaging, Special Issue on Storage and
Retrieval of Digital Media, Vol. 10(4), pp. 835-849, 2001.
[28] Wang, T., Rui Y., and Hu, S.M. Optimal Adaptive Learning
for Image Retrieval, Proc. of IEEE Computer Vision and
Pattern Recognition (CVPR2001), Kauai, Hawaii, December
11-13, pp. 1140-1147, 2001.
[29] Wang, W., Song, Y., and Zhang, A., Semantics Retrieval by
Content and Context of Image Regions, Proc. the 15th
International Conference on Vision Interface, Calgary,
Canada, May 27-29, 2002.
[30] Xu, Y., Duygulu, P., Saber, E., Tekalp, A. M., and YarmanVural, F.T. Object based image retrieval based on multi-level
segmentation, Proc. IEEE ICASSP, Istanbul, Turkey, vol. 6,
pp. 2019-2022, 2000.