Use of Genetic (Evolutionary) Algorithm as an
advertisement
 Algorithm as an")
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
GENETIC (EVOLUTIONARY) ALGORITHM:
INTRODUCTION AND ITS USE AS AN
ENGINEERING DESIGN TOOL
A A Adedeji
Department of Civil Engineering
University of Ilorin
Ilorin, Nigeria
2007
i
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
© A A Adedeji
No part of this book may be reproduced or stored in a retrieval
system transmitted in any form or by any means, and only by
photocopying or recording for the purpose of research for which
no permission is sought from the author.
Published by:
OLAD PUBLISHERS & PRINTING ENTERPRISES
Head Office: No. 45/70, Niger Road,
Ilorin, Kwara State, Nigeria
ISBN NO: 978 – 8115 – 86 - 1
Printed by: Mark Computer Centre
ii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Preface
The theory of evolution was once in scientific circles.
Charles Darwin theorised the evolution as a sort of survival of the fittest
or simply put: if you are fit you survive. A single cell would struggle
hard, among a pool of cells, to survive, while another cell would also
struggle harder and another very hard, but who ever is fit among the
population of cells would survive. Survival in this sense does not mean
that the harder the fitness, rather the survival is fit by random selection
or chaos and not by order. The random chance of variation together
with the law of selection is a problem-solving method of immerse power.
This book introduces the use of this principle to optimise design of
engineering problems and give manual computations to some examples
and generic idea of computer programming.
Adedeji, A. A.
iii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Table of Contents
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Preface
Table of contents
Introduction
Objective of the Book
Brief History of Genetic (Evolutionary)
Algorithms
Generic System in Genetic Algorithms
4.1
Chromosomal representation
4.2
Initial population
4.3
Fitness evaluation
4.4
Selection
Elitist
Linear rank selection
Roulette wheel selection
Stochastic universal sampling
Truncation selection
Tournament selection
4.5
Reproduction
Crossover
Mutation
Strength of Genetic Algorithms
Limitations of Genetic Algorithms
Some Specific Application of Genetic Algorithm
7.1
DNA
7.2
Design of hardware
7.3
Acoustic
7.4
Aerospace
7.5
Astronomy and astrophysics
7.6
Chemistry
Genetic Algorithms Simple Examples
Genetic Algorithms in Optimal Design
Problem Formulation Examples
10.1
Example 1
10.1.1 Problem formulation
10.1.2 Genetic operators
10.1.3 Comparison of results
10.2
Example 2
10.2.1 Floor planning
10.3
Example 3
10.3.1 Optimisation model
10.3.2 Structured genetic algorithms
iv
iii
iv
1
3
4
6
6
7
7
8
8
8
9
10
11
11
11
11
11
14
16
17
17
17
18
18
19
19
20
23
27
27
27
29
30
31
31
34
34
37
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
11.
12.
A A Adedeji
10.3.3 Proiblem formulation
10.3.4 Results and analysis
Conclusion and Recommendations
References
Appendix I
Binary/decimal conversion
Appendix II: PseudoCode
Appendix II: Executional Steps for Genetic Algorithms
Appendix III: Definitions of Symbols
v
37
40
44
45
48
51
52
57
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
1.
A A Adedeji
Introduction
After scientists became disillusioned with classical and neo-classical
attempt at modelling intelligence, they looked in other directions. Two
prominent fields arose, conventional (neural network, parallel
processing) and evolutionary computing. It is the latter that this paper
deals with. i.e. “Genetic Algorithms.”
Genetic Algorithms (GAs) are not too hard to programme or understand
since they are biological based. Thinking in terms of real life evolution
may help one understand. An initial population is created from a random
selection of solutions, which are analogous to chromosome (or genome).
This is unlike the situation where the initial state in a problem is already
given instead, such as in symbolic artificial intelligence.
When considering configuration design as a search problem, the number
of possible solution is usually too large for exhaustive search.
Knowledge-based systems rely on expert or experimental knowledge to
narrow down the search space to a manageable size. This approach may
work well in a situation where such knowledge is encodable (Radford
and Gero, 1988), but there are two disadvantages: i) it is often difficult
to extract and encode relevant design knowledge and ii) a knowledge
applicable in one domain may not possibly be applicable to another
domain, while the problem may be so large that the time taken to find a
solution is not practical. GAs are stochastic, parallel search and
designed to efficiently search large, non-linear, poorly-understood
search spaces, where knowledge-base system is scarce or difficult to
encode.
The genetic algorithm works in the following manners: The first step is
to represent a legal solution to the problem to be solved by using a
string of genes ( a gene is a unit in chromosome controlling heredity),
that can take on some value from a specified finite range. This string of
genes that represents a solution is the chromosome. Then an initial
population of legal chromosomes is constructed at random. And at each
generation, the fitness of each chromosome in the population is
measured. The fitter chromosomes are then selected to produce
offspring for the next generation, which inherit the best characteristics
of both the parents – the survivor of the fittest by Darwin’s theory of
evolution. After many generations of selection, for the fitter
chromosomes, the result is expected to be a population that is
vi
1
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
substantially fitter than the original. Genetic algorithms consist of:
Chromosomal Representation, initial population, fitness evolution,
selection, crossover and mutation.
2
vii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
2. Objective of This Book
The focus of this book o the introduction of the Genetic Algorithms
(GAs) development and implementation of a methodology for the design
of discrete engineering system by the use of Genetic Algorithms as an
automated design tools. Due to the methodology employed GAs may be
defined as been: efficient, since it finds an acceptable solution with
minimal computational effort; reliable, because it finds acceptable
solution regardless of the problem nuances or the starting point used;
accurate since it provides the best possible solution to a problem and
robust doe to the fact that methodology is efficient, reliable and
accurate.
3
viii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
3.
A A Adedeji
Brief History of Genetic (Evolutionary)
Algorithms and Variation
The earlier instances of what might be called Genetic Algorithms
appeared in the late 1950s and early 1960s, programmed on computers
by evolutionary biologists who were explicitly seeking to model aspects
of natural evolution. It did not occur to them that this strategy could be
more generally applied to artificial problems. In 1962, at the University
of Michigan, John Holland’s work on adaptive systems laid the
foundation for later development. Holland (1975) was the first to
explicitly propose crossover and other recombination operations.
However, the seminar works in the field of genetic algorithm came in his
book “Adaptation in Natural and Artificial System” where GA was used to
mimic some of the processes of natural evolution and selection.
In nature, each species needs to adapt to a complicated and changing
environment in order to maximize the likelihood of its survival. The
knowledge that each species gains is encoded in its chromosome that
undergoes transformation when reproduction occurs. Over a period of
time this changes to the chromosomes give rise to species that are more
likely to survive, and so have a greater chance of passing their improved
characteristic on to future generation. The genetic algorithm (GA) is a
stochastic global search method that mimics the metaphor of natural
biological evolution. Now the power of evolution has touched virtually
any field one cares to name while new uses continue to be discovered,
as research is ongoing. At the heart of it all lies nothing more than
Charles Darwin’s simple theory of evolution: survival of the fittest, and
that the random chance of variation, coupled with the law of selection is
a problem-solving technique of immense power with nearly unlimited
applications.
It is important to note that biological evolution refers to populations and
not to individuals and the changes brought about by evolution must be
passed on to the next generation. Hence evolution is a process that
results in heritable changes in a population spread over many
generations. In fact evolution can be precisely defined as any change in
the frequency of alleles within a gene pool from one generation to the
next. Most so-called standard dictionaries outside the scientific
community is different from the above definitions where the evolution is
referred to as a progressive action They are simply inexcusable for a
dictionary of science.
ix
4
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Evolution is a change in the gene pool of a population over time.
The theory of evolution and common descent were once controversial in
scientific circles. This is no longer the case. The scientific community
now considers the evolution theory and as common descent fact.
Science is based on an open and honest look at the data and not on
black boxes with dishonest debates where no common facts could not
be openly supported.
It is now a fact that “Theory of Nothingness” refers to evolution which is
indestructible. Space and matter can become uniform by diffusion,
driven by the second law of thermodynamics that create entropy. This
law simply puts that: energy is required to create complexity and
structure in material systems but entropy, which limits the life energy. In
other words, entropy ensures that the energy that assembles particles
into atoms into molecules into complex structure is no longer available
(Energy = 0) to do any more constructive work making sure that the
complex structure is eventually comes apart, but infinite by returning its
components into its surrounding.
When an electron and proton fuse they produce density, lose energy
and cancel charge. The extra energy may be given up as nuclear
radiation and heat. Some neutrons flies off into the space and others are
trapped in the electron-proton system to become helium fitter than the
initial matter. For instance, the only difference between helium and
hydrogen is that helium has a neutron in its nucleus, which requires an
an extra electron orbiting it to balance things out. Some energy is stored
as the extra density of the electron, capturing an extra electron forming
potential energy (fit) from increased differentiation and organization.
GA is based on this simple fact.
x
5
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
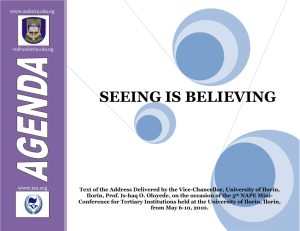
4. Generic System in Genetic Algorithms
Genetic algorithms consist of: Chromosomal Representation, initial
population, fitness evaluation, selection and reproduction (i.e., crossover
and mutation). Simple outline of a genetic algorithm is shown in Fig. 1.
INITIAL POPULATION
FITNESS
OBJECTIVE FUNCTION
SELECTION
CROSSOVER
MUTATION
GEN > MAX GEN
YES
STOP
NO
GEN ~ GEN + 1
Fig. 1. Outline of genetic algorithm
4.1
Chromosomal Representation
Before a genetic algorithm can be put to work on any problem, a
method is needed to encode potential solutions to that problem in a
form that a computer can process. The following approaches are in use.
By encoding solutions as binary strings sequences of 1s and Os
where the digit at each position represents the value of some aspect
of the solution.
xi 6
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
By encoding solutions as arrays of integers or decimal numbers,
allowing for greater precision and complexity than the comparatively
restricted method of binary numbers. See Appendix I on binary
operation
By representing individuals in a GA as strings of letters where each
letter again stands for a specific aspect of the solution.
The virtue of all these methods is to make it easy to define operators
that cause the random changes in the selection of candidates.
The canonical GA (PseudoCode) is represented simply as:
choose initial population
evaluate each individual’s fitness
repeat
select individuals to reproduce
mate pairs at random
apply crossover operator
apply mutation operator
evaluate individual’s fitness
until terminating condition
See Appendix II for a translation of the PseudoCode. The learning loop
can terminate either a satisfactory solution is found or the number of
generations pass a preset limit, suggesting that a complete solution will
not be found with this set of individuals. See Appendix III for
explanation of executional steps for genetic algorithm in Fig. III.
4.2
Initial Population
This is created from a random selection of solutions (which are
analogous to chromosomes). This is unlike in a symbolic artificial
intelligence where the initial state in a problem is given instead.
4.3
Fitness Evaluation
A value of fitness is assigned to each solution (chromosome) depending
on how close it actually is to solving the problem, thus arriving to the
answer of the designed problem. The solutions are thought of as
possible characteristics that the system would employ in order to reach
the answer.
7xii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
4.4
A A Adedeji
Selection
According to Dawkins (1986), natural selection means differential
survival of entities where some entities live and others die. There are
many different techniques, which a genetic algorithm can use to select
the individuals to be copied over into the next generation. Some of the
methods listed below are mutually exclusive, but others can be and
often used in combination.
Elitist selection: The most fit members of each generation are
guaranteed to be selected. Though most GAs don’t use pure elitism
unless modified from each generation and copied into the next
generation in a case nothing better come up.
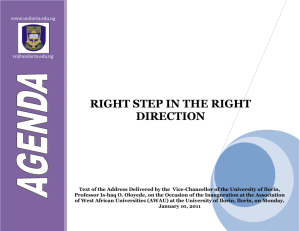
Linear Rank Selection (LRS): Here the neighbourhood (is a set of
individuals placed close to it on the grid, with its shape having a
great impact on the behaviour of the evolution algorithm – could be
linear or compact, see Fig. 2 a and b respectively. Increasing the
neighbourhood size creates a larger overlap and decreases the
propagation time. Selection intensity increases only when the size is
fixed and the local size ® of the neighbourhood is increased, so that
® = (
( xi x) ( yi y)
2
2
). / N at the mean centre (x,y)
of a neighbourhood pattern of N points. Take example of the 1st
pattern of neighbourhood of L5, ® =
22
0.8944 ) is sorted
5
according to the objective values. The LRS algorithm defines the
target sampling rate (TSR) of an individual x (i.e. the number of
times an individual should be chosen as a parent for every N
sampling operations) as:
TSR(x) = min + (max – min) rank(x)/(N-1)
(1)
Where rank (x) = index of x when the neighbourhood is sorted in
increasing order based on fitness and N = neighbourhood size so
that we impose the constraints that 0 TSR (x), TSR (x) = N, 1
max 2 and min – max = 2.
xiii8
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
L5 (n=5)
A A Adedeji
L9 (n=9)
(a) 1inear neighborhood pattern
C9 (n=9)
C13(n=13)
b) Compact neighborhood pattern
Fig. 2 Set of individuals placed to neighbourhood on a grid
Roulette Wheel Selection (RWS): A form of fitness-proportionate
selection in which the chances of an individual’s being selected
is proportional to the amount by which its fitness is greater or
less than its competitors fitness. This is a stochastic algorithm
and involves the following technique:
The individuals are mapped to contiguous segments of a line,
such that each individual’s segment is equal in size to its fitness.
A random number is generated and the individual whose
segment spans the random number is selected. The process is
repeated until the desired number of individuals is obtained. See
Fig.3 with the individuals of Table 1 that shows the selection
probability for 11 individuals. Individual 1 is the most fit and
occupies the largest interval, while individual 10 is the second
least fit, the least fit interval (of value 0) is individual 11 and it
has no chance for reproduction.
xiv
9
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Table1 Selection probability and fitness value
Number of
individual
Fitness value
Selection
probability
1
2
3
4
5
6
7
8
9
10
11
2.0
0.18
1.8
0.16
1.6
0.15
1.4
0.13
1.2
0.11
1.0
0.09
0.8
0.07
0.6
0.06
0.4
0.03
0.2
0.02
00
0.0
Trial 4
Trial 2 Trial 6
2
3
1
Trial 5
4
5
Trial 1
6
7
Trial 3
8
9 10
Individual
0.0
I
0.18
I
0.34
I
0.49
I
0,62
I
0.73
Fig. 3 Roulette-wheel selection
I
0.82
I
I
0.95
I
1.0
For selecting the mating population the appropriate number of
uniformly distributed random numbers (between 0.0 and 1.0) is
independently generated. For the 6 random numbers: 0.81, 0.32,
0.96, 0.01, 0.65 and 0.42, the selection process is shown. This
may actually provides a zero bias but may not guarantee minimum
spread
Stochastic Universal Sampling: This method provides zero bias and
minimum spread. The individuals are mapped to contiguous
segments of a line, such that each individual’s segment is equal in
size to its fitness exactly as in roulette-wheel selection. Consider
Npointer the number of individuals to be selected, then the
distance between the pointers are1/Npointer and the position of
the first pointer is given by a randomly generated number in the
range [0, 1/Npointer]. Again for 6 individuals to be selected as in
roulette-wheel selection, the distance between the pointers is 1/6
= 0.167. See Fig. 4 for the selection for the sample of the random
number 0.1 in the range [0, 0.167].
After selection the mating population consists of the individuals:1,
2, 3, 4, 6, 8.
Pointer 1 Pointer 2 Pointer 3
Pointer 4 Pointer 5 Pointer 6
Individual
1
2
3
4
5
6
7 8 9 10
I
I
I
I
I
I
I I I
0.0
0.18
0.34
0.49
0.62
0 73 0.82
0.95 1.0
random number
Fig. 4 Stochastic Universal Sampling
xv10
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Truncation Selection: Compared to the previous methods of
selections that model natural selection truncated is an artificial
selection method. The selected parents range between 50% - 10%
and any individual below the truncated threshold value do not
produce.
Tournament Selection: Here subgroup of individuals is chosen from
the large population and the members of each subgroup compete
against each other. Only one from each subgroup is chosen to
reproduce.
Others are: Generasational selection, in which the offspring of the
individuals selected from each generation become the entire next
generation and no individuals are retained between generations;
steady-state selection, in which the offspring of the individuals
selected from each generation go back into the pre-existing gene
pool, replacing some of the less fit members of the previous
generation.
4.5
Reproduction
According to Dawkins (1986), natural selection means differential
survival of entities where some entities live and others die For this to
happen there must be a population of entities capable of reproduction.
Crossover: Crossover is a GA operator that entails choosing two
individuals to swap segments of their code, whereby producing new
offspring that are combination of their parents. This process is
intended to simulate the analogous process of recombination that
occurs to chromosomes during sexual reproduction. In other words
crossover causes genotypes (set of genes that builds a life form or
phenotype) to be cut and spliced
Mutation: This operator forms a new chromosome by making
(usually small) alterations to the values of genes in a copy of a single
parent chromosome, just as mutation in living things changes one
gene to another, so also in a genetic algorithm.
Crossover and mutation are two basic operators of GA. Performance of
GA depends on them very much. The types and implementation of these
xvi
11
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
operators depends on the encoding and also on the problem. Here few
very important ways of crossover and mutation are listed below (Fig. 5):
Binary Encoding:
Single-point crossover (of 10-bits)
BEFORE CROSSOVER
Parent A
Parent B
+
0011
011010
1110
AFTER CROSSOVER (OFFSPRINGS)
Parent A
0011
010001
010001
Parent B
1110
011010
Mutation
0 0 1 1 0 1 0 0 0 1 => 1 1 1 1 0 1 1 0 1 0 (Offspring)
Multi-point crossover (of 10-bits)
BEFORE CROSSOVER
Parent A
+
001 101 1010
Parent B
111 001
AFTER CROSSOVER (OFFSPRINGS)
Parent A
001 001 1010
0001
Parent B
111 101
0001
Mutation
1 1 1 1 0 1 0 0 0 1 => 1 1 1 1 0 1 0 1 0 1 (Offspring)
Fig. 5 Crossover and mutation techniques
Permutation Encoding
One crossover point selected, the permutation is copied from the
first parent till the crossover point, then the other parent is
scanned and if the number is not yet in the offspring, it is added.
xvii
12
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Crossover:
Parent A
Parent B
Offspring
(1 2 3 4 5 6 7 8 9) + (4 5 3 6 8 9 7 2 1) = (1 2 3 4 5 6 8 9 7)
Mutation (Two numbers are selected and exchanged)
Offspring
(1 2 3 4 5 6 8 9 7) => (1 8 3 4 5 6 2 9 7)
In traditional GAs, the chromosome length is determined when the
phenotype (a survival machine built by a set of genes (genotypes) is
encoded in to a genotype. The length is always fixed and can not
change with evolution. Young and Week (2004) developed an effective
genetic algorithm that can change the chromosome length by
implementing the design freedom by extending the length of
chromosome allowing for the reduction in the computational cost for
complex problems with large number of design variables. Examples of
design in the phenotype and corresponding chromosome in the
genotype are shown in Fig.6.
Short chromosome
0
1 0
1
R
1
0
Long chromosome
0
H
1
0
R
1
1
0
1
1
H
a
L (10 bits)
L (6-bits)
1
0
b
(a) GENOTYPE
a
b
H
H
R
R
Less design information
More design information
(b) PHENOTYPE
Fig. 6 Design in the phenotype and corresponding chromosomes
in genotype domain
xviii
13
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
5.
A A Adedeji
Strength of Genetic Algorithms (GAs)
Genetic algorithms are intrinsically parallel as most other algorithms are
serial and can only explore the solution to a problem in one direction at
a time which can lead to a sub-optimal solution that nothing could be
done but abandon to start all over. GAs are much more likely to locate a
global peak than the traditional search techniques because they are less
likely to get stuck at local minimal.
Due to its parallelism it allows the evaluation of many schemas at once.
GAs are well-sited to solving problems (as in non-linear problems) where
the space of all potential solution is truly large for a reasonable time. In
a linear problem, for instance, the fitness of each component is
independent of amount of time. Non-linear is the norm where changing
one component may have triple effects on the entire system. Problem
solving results in a combination explosion, the space of, say, 1000-digit
binary strings can be exclusively searched by evaluating only 2000
possibilities if the problem is linear, but if it is a non-linear, an
exhaustive search requires evaluating 21000 (i.e. individual represents
one sample point in a space of size 2n, as n = a bit string of length)
possibilities, which may take over 300 digits to write in full. But this can
be done in a very short period of time if GA is used.
The principal advantages of the evolutionary algorithms resides in the
fact that no sensitivity analysis is required and global optimal solution
can be obtained.
GAs perform well in problems in which the fitness landscape is complex
one. They are cases where fitness functions are discontinuous and
change over time with many local optima. Evolutionary algorithms have
proved to be effective at escaping local optima and discovering global
optimum.
GAs excel in their ability to manipulate many parameters simultaneously
(Forrest, 1993). In a Pareto Optimal (non-dominated) (Cocilo, 2000) GA,
a particular solution to a multiobjective problem optimises one
parameter to a degree such that the parameter cannot be further
improved without causing a corresponding decrease in the quality of
some other parameters.
xix 14
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
GAs Know nothing about the problems they are developed to solve by
not using previously known domain-specific information to guide each
step and making changes towards a specific improvement. Here GAs
make random changes to their candidate’s solution and then use the
fitness function to determine whether those changes produce an
improvement.
The entropy—based searching techniques with multi-population and the
quasi—exactness penalty function (Wang, 2002) has been developed to
ensure rapid and steady convergence of results.
xx 15
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
6.
A A Adedeji
Limitations of Genetic Algorithms
In creating a GA, the first consideration is defining a representation for
the problem. The language required must be robust so as to tolerate
random changes to avoid errors. This can be overcomed: (i) by defining
individuals as lists of numbers (binary valued, integers or real-valued)
that represent some aspects of a candidate solution, (ii) though, the
issue of representing candidate solutions in a robust way does not exist
in nature, so virtually any change to an individual’s gene will still
produce an intelligent result and so mutation or swapping sub-trees has
a higher chance of producing an improvement.
In order to attain higher fitness for a given problem, problem of writing
fitness function must be carefully considered.
Size of the population, rate of mutation and crossover and type and
strength of selection, all must be carefully chosen. If the population size
falls too low, mutation rate will be too high resulting to a strong
selection pressure (as in environmental changes) so that species may go
extinct.
GA seems to have problem in dealing with deceptive fitness functions
(Mitchell, 1996) to find the location of the global optimum. A problem
with 8-bits strings – 0 0 0 0 0 0 0 1 would be less fit than 0 0 0 0 0 0
1 1 naturally, and the string 1 1 1 1 1 1 1 1 turns out to be less fit than
the string 0 0 0 0 0 0 0 0. In such a problem a GA would be no more
likely to find global optimum than random search
A premature convergence in GA, by driving down the population
diversity too soon, if an individual that is more fit than most of its
competitors emerges early during running, whereby leading the
algorithm to converge on local optimum. This often occur in nature
(genetic drift).
Most researchers (Holland 1992, Forrest 1993 and Haupt et al 1998)
have advised against the use of GA to solve analytically solvable
problems as the traditional analytic methods take much less time and
computational effort than GA.
xxi 16
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
7.
A A Adedeji
Some Specific Applications of GAs in Science
and Engineering Technology
Engineering problems that are faced in everyday decision-making are
often complex and multiobjective, requiring solutions to be judged on
their ability to satisfy competing design goals (Rawlins, 1991). In
structural mechanics for instance, many nonlinear problems, such as
elastic and post-buckling of elastic-structures, involve a category of
geometrical nonlinear elastic systems. Circuit optimisation becomes one
of the applications most used by microwave engineers and due to the
nature of the circuits the optimisation task is far from easy. Error
function mostly surfers from local minimum problems so that in many
cases the optimisation gets unbelievably inefficient.
7.1.
Deoxyribonucleic Acid (DNA)
Also in DNA (Deoxyribonucleic acid), models have represented molecules
with geometrical nonlinearity and material elasticity (Stump et al, 1997,
Fain and Rudnick, 1999). For such nonlinear elastic problems, the static
equilibrium configuration of the system is the one that possesses
stationary potential energy. And since the system is nonlinear, different
configurations corresponding to different energy levels can exist under
the same geometric constraints. To search and identify the different
configurations is usually the first step towards the understanding of the
system. GAs were developed to solve unconstrained optimisation
problems. However, engineering design problems are usually
constrained. They are solved by transforming the problem to
unconstrained problems.
7.2
Design of Hardware
In a vast of hardware devices, principles of evolution has been employed
to produce a prototype voice-recognition circuit that can distinguish
between and respond to spoken commands using only 37 logic gates- a
task that would have been considered impossible for any human
engineer. Random bit strings have been generated and used as
configurations for the field programmable gate array (FPGA), selecting
the fittest individuals from each generation, reproducing and randomly
mutating them, swapping sections of their code and passing them on to
another round of selection.
xxii
17
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Other specific areas where GA has been used to tackle broad varieties of
problems are:
7.3
Acoustic
GA is used to design a concert hall with optimal acoustic properties
maximizing the sound quality for the audience (Sato et al, 2002).
GA was used to train neural networks to distinguish between sonar
reflections from different types of the object: man-made metal spheres,
plant-life etc (Porto and Fogel 1995).
Tang et al (1996) surveyed the uses of GAs within the field of acoustics
and signal processing, such as the design of active noise control system.
7.4
Aerospace
Multiple objective GA was used to design the wing shape for a
supersonic aircraft, by minimising aerodynamic drag at supersonic
cruising speeds, and aerodynamic load (the bending forces on the wing)
(Obayatshi et al, 2000). Chromosome in this case is a string of 66
members, each of which corresponds to a specific aspect of he wing for
its shape, its thickness its twist etc.
Minimising the twisting moment (additional fitness objective) of the
aircraft wing – A known potential problem for arrow-wing designs. Here,
additional control points (Sasaki et al, 2001) for thickness are added to
the array of design variables. The results, when compared with the
Japanese National Aerospace Laboratory’s wing design for NEXST-1
experimental supersonic airplane, were found to be physically
reasonable and superior to the NAL’s design.
Satellites in high Earth orbit, around 35,420 km up, can see large
sections of the planet at once and be in constant with ground stations,
but they are far more expensive to launch and more vulnerable to
cosmic radiation. It is therefore more economical to put satellites in low
orbits. But because of the curvature shape of the Earth, it is inevitable
that satellites will at times lose line-of-sight access to surface receivers
and thus be useless. Even constellation of several satellites experience
unavoidable blackouts and losses of coverage for this reason. This is a
multi-objective problem where there is the need to arrange the satellites
xxiii
18
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
orbits to minimise this downtime. GA was then applied to this problem,
the evolved results for the constellations were unusual, highly
asymmetric orbit configurations, with the satellites spaced by alternating
large and small gaps rather than equal-sized gaps as conventional
technology would produce. This solution significantly reduced both
average and maximum revisit time up to 90 minutes.
7.5
Astronomy and Astrophysics
GA (PIKAIA) has been used generation, fitness-proportionate ranking
selection and elitism to ensuring that the single best individual is copied
over once into the next generation without modification, with a cross
rate of 0.65 and a variable mutation rate of 0.003 initially and gradually
increased later on. In the galactic rotation-curve problem, the GA
produced two curves, both of which were very good fits to the data. In
solving for the six critical parameters of the solar wind, the GA
successfully determine the value of three of them to an accuracy of
within 0.1% and the remaining three to accuracies of between 1 to
10%.
7.6
Chemistry
High powered, ultrasonic pulses of laser energy can split apart complex
molecules into simpler molecules in the applications to organic chemistry
and microelectronics, where the specific end products of such reactions
can be controlled by modulating the phase of the laser pulse. But for
large molecules, solving for the desired pulse shape analytically is too
difficult because of its complex calculations and its relevant
characteristics are not known precisely enough. This problem has been
solved using evolutionary algorithm. The algorithm fires a pulse,
measures the proportions of the resulting product molecules, randomly
mutates the beam characteristics with the hope of getting theses
proportions closer to the desired output.
GA was able, according to Gillet (2002), to simultaneously satisfy the
criteria of molecular diversity and maximisation synthetic efficiency and
was able to find molecules that were drug-like.
19
xxiv
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
8.
A A Adedeji
Genetic Algorithms Simple Example
Let us consider an equation: a + 2b + 3c + 4d = 30, where a, b, c, and
d are positive integes. Given the constraints that, 1 a, b, c, d < 30. For
the so-called ‘building blocks’ to be reached quicker since “better”
solutions have a better chance of surviving.
Starting from the beginning. Let us choose 5 random initial solution sets
(one may wish to choose more as wished). It is possible to choose fewer
constraints for b, c, d but for the sake of simplicity we use 30. Table 2
(a).
1st generation
Table 2(a) 1st generation chromosomes and
contents
Chromosome
Solutions to reach
A
B
C
1
1
28
15
2
14
9
2
3
13
5
7
4
23
8
16
5
9
13
5
their
D
3
4
3
19
2
To calculate the fitness values, plug each solution set into he expression
a+2b+3c+4d, then calculate the absolute of the difference of each
expression with 30. This is the fitness value.
Table 2 (b) Fitness value of 1st generation
chromosome, solution tests
Chromosome
Fitness value
1
2
3
4
5
114 – 30 = 84
54 – 30 = 24
56 – 30 = 26
163 – 30 = 133
58 – 30 = 28
Since the values that are lower are closer to the desired answer (i.e.
30), these values are more desirable. In this case high fitness values
are not desirable while lower ones are. In order to create a system
xxv
20
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
where chromosomes with more desirable fitness values are more likely
to be chosen as parents, we must first calculate the percentages that
each chromosome has to be picked. A sum of the multiplicative inverses
of the fitness values (0.135266) are calculated and the percentages from
there (Note that all simulations were created using a random number
generator) are obtained. See Table 2©.
Table 2 © Parent selection by %
Chromosome
Likelihood
1
2
3
4
5
(1/84)/0.135266 = 8.8%
(1/24)/0.135266 = 30.8%
(1/26)/0.135266 = 28.4%
(1/133)/0.135266 = 5.56%
(1/28)/0.135266 = 26.4%
In order to pick the 5 chosen pairs of parents. Each parent will have one
offspring and has 5 new solutions sets total. Consider a die with 10,000
sides, and on the 880 of those sides chromosomes 1 was labelled and
on 3080 of those sides, chromosome 2 was labelled and on 2640 sides 3
was labelled and on 556 and 2640 of those sides chromosome 4 and 5
were labelled respectively. In order to choose our first pair (of parents)
we role the die twice (each for a parent) and then take those
chromosomes to be our first two parents. Continuing in this fashion we
have the following parents as shown in Table 2 (d).
Table 2 (d) Simulated selection of parents
Father
Mother
Chromosome
Chromosome
3
4
3
2
5
1
2
5
5
3
The offspring of each of these parents contains the genetic information
of both father and mother. Here crossover technique is applied. We
may say that a mother has solution sets of a1, b1, c1, d1, and a father a2,
b2, c2, d2, then there can be six possible crossover dividing lines (refer to
section 4.5 on crossover).
xxvi 21
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Father
Chromosome
Table 2(e) Generalisation of crossover
Mother
Offspring chromosome
Chromosome
a1 b1, c1, d1
a1 b1, c1, d1
a1 b1, c1, d1
a2 b2, c2, d2
a2 b2, c2, d2
a2 b2, c2, d2
a1 b2, c2, d2 or a2 b1, c1, d1
a1 b1, c2, d2 or a2 b2, c1, d1
a1 b1, c1, d2 or a2 b2, c2, d1
Let us apply this to our offspring: Table 2 (f).
Table 2 (f) Simulated crossover from parent chromosomes
Father
Mother
Offspring chromosome
Chromosome
Chromosome
13 5, 7, 3
9, 13 5, 2
13, 5, 7 3
14 8, 2, 4
13, 15 7, 3
1 28, 15, 3
14, 9 2, 4
9, 13, 5 2
9 13, 5, 2
9, 13 5, 2
13, 28, 15, 3
9, 13, 2, 4
13, 5, 7, 2
14, 13, 5, 2
13, 5, 5, 2
Now fitness values can be calculated for the new generation of
offsprings. See Table 2 (g).
Table 2 (g) Fitness values of offspring chromosomes
Offspring
Fitness
Chromosome
Chromosome
13, 28, 15, 3
9, 13, 2, 4
13, 5, 7, 2
14, 13, 5, 2
13, 5, 5, 2
126 – 30 = 96
57 – 30 = 27
57 – 30 = 27
63 – 30 = 33
46 – 30 = 16
The average fitness value for the offspring chromosome were 38.8,
while the average fitness value for the parent chromosomes were 59.4.
In the next generation, the offspring are supposed to mutate. If after
the mutation has been done one chromosome should eventually reach a
fitness level of 0 eventually. That is where a solution is found
22
xxvii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
9. Genetic Algorithms in Optimal Design
Genetic algorithms were developed to solve unconstrained optimisation
problems. However, engineering design problems are usually
constrained. They are solved by transforming the problem to an
unconstrained problem. The transformation is not unique and one
possibility is to use the following strategy:
Find
Minimise :
x = [bx1,…, bxNEBV; ix1,…,ixNNIV; sx1,…, sxNSBV]
f ( x) c i Max (0, g i ) c j h j
i
(1)
(2)
i
where design variables b, i and s = Boolean, inequalities and continuos
respectively, ci and cj = penalty parameters used with inequality and
equality constraints. Determining the appropriate penalty weights is
always problematic. An algorithm can be proposed here where the
penalty weight is computed automatically and adjusted in an adaptive
manner. First the objective function is expressed:
f ( x) ca Max (0, gi ) h j
i
(3)
i
In order to select ca : (i) ca is set as the minimum f(x) among all feasible
designs in the current generation, if there are feasible designs in the
current generation. And if the maximum f(x) among all feasible designs
is used, infeasible designs will have a smaller probability to survive even
if the constraint violations are small; (ii) ca is set as the f(x) that has the
least constraint violation if there is no feasible design.
The general constrained nonlinear programming problem can be stated
as follows:
Minimise f(x)
Subject to gj(x) 0,
(4a)
j = 1, 2, …q
(4b)
Where f(x) = cost(fitness) function, x = {x1, x2,….xn}T = a vector of n
design variables, gj(x) (j = 1, 2, …q) = constraints functions. This can
be transformed into the following model:
23
xxviii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Minimise f(x)
Subject to
g ( x)
(5a)
n
ln exp[gi ( x)) 0
i 1
1
(5b)
1 n
i 1
The parametric constraint evaluation function ln exp[g i ( x)) 0 and
if the optimisation problems in equations (4) and (5) and have
the same Kuhn-Tucker points. In other word equation (5) can be solved
by using quasi-exactness penalty function.
n
( x, a) f ( x) ln exp[gi ( x)) 0
i 1
a
(6)
Parameter can be chosen in the range103 to 105 and a > 0 is the
penalty factor. The fitness function of GA therefore is:
Max F(x, a) = c - (x, a)
(7)
C is a large positive number to ensure F > 0.
Typically, cost is the most popular optimisation criterion in structural
design. Cost is a function of the total weight of the structure. Other
important factors that may be considered in estimation of the cost of a
structure are associated with maintenance (relating to the total surface
area for structural element) and connections. For example, framed
structures, where total weight is the only term in the objective function
subjected to stress, displacement, and fabrication constraints, the
optimisation problem may be defined as:
Minimise
H
zW e Le Ae
(8)
e
Subject to the following constraints:
{l} {all} {u}, dl dall du and Al Aall Au
24
xxix
(9)
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
where e, Le and Ae = material density, length and cross-sectional area
of the element e respectively, {}, d and A represent the constraints for
stress, displacement and area respectively. Subscripts i and u refer to
the prescribed lower and upper boundaries of each constraint.
In GA, to evaluate the performance of a solution string, the string’s
binary characters are decoded into values of the design variable
representing the properties of the structure. Using these design
variables, a structural analysis may be performed using Finite Element
method of analysis. After which the value of the objective function as
given in equation (4) is computed. Now if any constraints are violated, a
penalty (i.e. the degree in which the constraints are violated) is applied
to the objective function. Therefore the penalised objective function
provides a relatively meaningful measurement of performance of the
solution string. Typically the penalty functions are of the form:
c
i 1 k
1
c max
n
(10)
where i = the penalty constraint i, k = penalty factor, c = value of the
constraint from a solution string, cmax = value of the constraint i and n =
penalty rate. The penalty objective function of a particular string can be
obtained by multiplying the fitness value or cost objective (ie weight of
the stricture) by the corresponding penalty factor k. so that:
m
P W i
(11)
where P = penalized objective function, W = weight of the structural
member and m = total number of points where the constraints are
checked and the product representing the total penalty for i constraints.
Once the fitness of each string in the population is determined from the
penalised objective function values, a new generation of string is
produced using reproduction operator (see Reproduction for crossover
and mutation (of 0.1%) methods in section 4.4). After a mutation
operation is applied to the population a new generation is reproduced.
25
xxx
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
In this case the population is divided into several partitions. The strings
inside each partition are assigned the same probability of being selected
as parent strings. This reproduction scheme may be based in the elitist
model (see selection 4.4) as proposed by De Jong (1975) where the
partitioning may improve local search in the neighborhood of the upper
partition of the population. As such global exploration of the search
space may be prohibited.
26
xxxi
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
Problem Formulation Examples
10.
10.1
A A Adedeji
Example 1
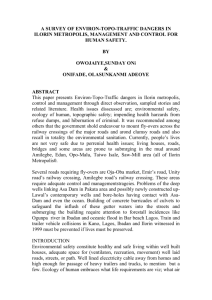
In this section, the discrete weight optimization of a 10-bar plane truss
shown in Fig.7 will be solved using a floating point GA. Forty two shapes
taken from BS5950 manual are available and are given in SI units in
Table . The assumed data are modulus of elasticity, E=68.9 x 103 MPa,
density of the material, =2770 kg/m3, allowable stress = ±172 MPa
and allowable displacement = ± 50.8mm.
5
3
1
1
2
9
7
5
6
8
6
9m
10
3
4
445 kN
9m
4
2
445 kN
9m
Fig.7 Plane truss system with 10 steel-bars
10.1.1 Problem formulation
The mathematical model of minimum weight design using available
member sizes can be expressed as in the following:
m
Min.W L j A j ( i )
j (i ) 1,2,...42
(12)
i = 1, 2, . . .10
(13)
i 1
Subject to:
stress i - all 0,
deflection k - all 0,
k = 1, 2, …12
xxxii
27
(14)
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
where A is a cross sectional area pointed by the 10-element design
vector j(i). For example, A8(3) is the shape 8 from Table 3, pointed for
member 3 (A8(3)) =1858 mm2). And and Li are, density and length
for that member respectively. Inequalities (equations 4 and 5) express
the constraints on stresses and vertical and horizontal deflections of
joints. The design vector j (i) is treated as a floating point number, and
its integer part is used as a pointer. Since there are 10 design variables
and 42 available shapes, the intrinsic size of the search space is 4210
(1016).
Table 3 – Properties of Steel Shapes
Shape
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Area
(mm2)
1045
1161
1284
1374
1535
1690
1697
1858
1890
1993
2019
2181
2239
2290
Shape
15
16
17
18
19
20
21
22
23
24
25
26
27
28
Area
(mm2)
2342
2477
2497
2503
2697
2723
2897
2961
3097
3206
3303
3703
4658
5142
Shape
29
30
31
32
33
34
35
36
37
38
39
40
41
42
Area
(mm2
7419
8710
8968
9161
10000
10323
10903
12129
12839
14193
14774
17097
19355
21613
As the present problem is a constrained optimization one, it is necessary
to transform it into an unconstrained problem. Many alternatives are
possible. In this study, a transitional exterior penalty approach is used.
The transformed model is expressed as follows:
m
12
10
Min.W Aj (i ) Li P i (ei 1) k (ek 1)
i 1
1
i 1
j (i) 1,2,...42
(15)
in which = 1 for = 0 or = 0 and P is a penalty coefficient.
In order to compare the results properly with those from the literature,
all the computations are done in the original units used by the other
researchers, and then converted to SI units. For a typical run, very little
computing time, in order of few minutes on a Pentium III, 1.2 GHz, is
28
xxxiii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
required. The use of PseudoCode program with the relevant parameters
is given in the Appendix II, while Appendix III shows the flow chart for
executional steps on GA.
10.1.2
Genetic operators
In this work, the following GA operators are used:
Tournament selection: The selection operator is intended to improve the
average quality of the population by giving individuals of higher fitness a
higher probability to be copied into the next generation. Tournament
selection works as follows: Choose two individuals randomly from the
population and copy the best individual into the intermediate population.
Whole linear crossover: Crossover operator is intended to combine the
genetic data of the existing population and generating offsprings. Pair of
chromosomes are recombined on a random basis to form two new
individuals. If according to a probability of crossover parameter, p c,
there is crossover, then a whole linear crossover is used. From two
parents P1 and P2, three offsprings are generated, namely
0.5P1+0.5P2, 1.5P1-0.5P2, and -0.5P1+1.5P2. The best two of the
three offsprings are then selected.
Non-uniform mutation: Mutation operator plays a secondary role. It
allows new genetic patterns to be formed, thus improving the search
method. Occasionally, it protects some useful genetic material loss.
During the process, a rate of mutation, pm, determines the possibility of
mutating one of the design variables. If a variable (V) is chosen to be
mutated, its value is modified as follows:
V = V + (t, bU – V)
Or
(16a)
V = V - (t, bL – V)
(16b)
where t is the actual generation, bU and bL the upper and lower bounds
for the variable, and (t, y) is given as (Turkkan,,2003),
(t, y) = y (1 – r(1 – c/T)2)
(17)
where r is a uniform random number between 0 and 1, T is the
maximum generation, and b is a parameter determining the degree of
dependency on the generation number (usually between 1 and 5).
29
xxxiv
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Elitist strategy: In standard GA the best possible solution is not
preserved, thereby increasing the chance of loosing the obtainable best
possible solution. Elitist strategy overcomes this problem by copying the
best member of each generation into the next one.
10.1.3
Comparison of results
The result produced in this example is compared with the bit string
coded GA solutions obtained by several researchers as shown in Table 4.
It is believed that the minimum weight obtained by Cal and Thierauf
(1993) and the present work is the global minimum, therefore the best
possible solution. The solutions obtained by Galante (1996) and Ghasemi
et al. (1999) are not acceptable solutions in a mathematical sense, as
they violate slightly the displacement constraint. It is observed that the
vertical displacement of node 2 is the binding constraint and a maximum
stress of 99 MPa, well below 172MPa, is reached in member 5. State of
stress and displacement of the structure is shown in Fig. 8.
Because of its simplicity and ease of coding the floating point GA
procedure described here can be applied to a wide variety of
optimization problems. It has been shown here that it can be also used
successfully in the discrete weight optimization of structures. Despite the
large design space of permissible solutions, the procedure converged
rapidly towards the best possible solution.
Table 4. Comparison of the optimum solution for the truss system
Method
I
II
III
IV
V
VI
Weight
(kg)
2545.4
2490.6
2534.1
2475.9
2471.0
2490.5
2y
(mm)
-50.5
-50.5
-50.5
-51.1
-51.2
-50.5
1
42
42
41
42
42
42
2
1
1
1
1
1
1
3
38
39
39
38
38
39
Note:
Shape of members
4
5
6 7
33 1
1 32
32 1
1 26
30 1
1 31
32 1
1 28
31 1
1 28
32 1
1 28
I: Rajeev and Krishnamoorty (1992)
II: Cai and Thierauf (1993)
III: Coello (1994)
IV: Galante (1996)
V: Ghasemi & al. (1999) with population = 100
VI: Present work
all = 50.8 mm, all = 172 Mpa, and max = 99 Mpa (number 5)
30
xxxv
8
37
38
38
38
39
38
9
37
38
38
38
39
38
10
6
1
1
1
1
1
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Fig.8 deformed shape of the truss system at minimum weight
10.2
Example 2
10.2.1
Floor planning
This section uses a floor-planning problem [Radford and Gero, 1988], in
Table 5, to follow the issues discussed so far. Consider an apartment
floor-plan of 3-bedrooms, a living room, Kitchen, bath and a hall. The
problem is to find the length and width of each room that will minimize
the cost of the apartment, subject to some constraints. The cost for
each room in this case is the area except for the cost of the kitchen and
bathroom, whose costs are twice their respective areas. The constraints
are:
Table 5 Dimensions of the rooms
Room
Living
Kitchen
Bath
Hall
Bedroom 1
Bedroom 2
Bedroom 3
Length (m)
Min
Max
2.44
6.10
1.83
5.49
1.68
1.68
1.68
1.68
3.05
5.19
2.75
6.10
2.44
5.49
Width(m)
Min
Max
2.44
6.10
1.83
5.49
2.59
2.59
1.07
1.83
3.05
5.19
2.75
6.10
2.44
5.49
Min
36.60
15.25
Area (mm2)
Max
Proportion
91.50
1.5
36.60
Any
5.20
30.50
30.50
30.50
21.96
54.90
54.90
54.49
Any
1.5
1.5
1.5
Further, there must be a space -- 3.0 units -- for a doorway in the walls
connecting bed2 and bed3 to the hall, and all rooms are rectangular (as
is the entire plan).
31
xxxvi
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
This design problem is a nonlinear optimization problem and can be
formulated mathematically as follows. Let length be the horizontal
dimension and width the vertical dimension, then the variables are given
in Table 6.
Table 6 Design variables due to rooms dimensions
Room
Length/width
Label
Living
Length
X1
Living
Width
X2
Kitchen
Length
X3
Kitchen
Width
X4
Bedroom 1
Length
X5
Bedroom 2
Length
X6
Bedroom 2
Width
X7
Bedroom 3
Width
X8
Although at first glance there appear to be fourteen variables, one each
for the length and width of each room, analysis of the problem reveals
that some of the variables can be computed from others. For example
the width of the hall is the width of the living room minus the width of
the bathroom.
The design task is to minimize the cost of the apartment, that is to:
minimise
zcost = X1X2 + 2X3X4 + 9350 (cost of bath in N year2005)
+ 1.69(X2 - 2.59) + X4X5 + X6X7 + X6X8
(18)
subject to the following constraints:
Living
X1, X2 6.10, X1, X2 2.44,
X1/X2 1.5,
X1X2 91.5, X1X2 36.6,
Kitchen X3, X4 5.49, X1, X2 1.83, X1X2 36.6, X1, X2 15.25
Hall
1.68 (X2 - 2.59) 21.95, 1.68 (X2 - 2.59) 5.20,
Bedroom 1
X3, X4 5.19, X3, X4 3.05, X5 X4 54.9, X5 X4
36.6, X5/X4 1.5,
Bedroom 2
X6, X7 6.10, X6,X4 2.75 X6 X7 54.9, X6 X7 36.6,
xxxvii
32
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
X6/X7 1.5,
Bedroom 3
X8, X6 5.49, X8,X6 2.44. X8 X6 54.9, X8 X6 36.6,
X6/X8 1.5
Doorways (in hall)
X7 – 2.59 0.92, X8 – X4 0.92
The whole plan is rectangular therefore:
X1 + 1.68 = X3 + X5
Wall alignments:
2.59 + (X2 – 2.59) + X4 = X7 + X8 = X2 + X4
(19)
(20)
(21)
Using GA in this problem, the constraints must be incorporated in the
encoding or the objective function (zcost) and the design variables
(X1...X8) have to be represented in a form suitable for GA.
Each variable must be encoded in a bit string and the strings of all
variables forming the genotype. Since the minimum and maximum value
of each variable is given, only the range (the difference between the
maximum and minimum values) needs to be represented. The maximum
range is 12 and as an accuracy of about 0.5 units is sufficient, 11 bits
are used to encode the variables with a range of 12 and 10 bits for the
rest.
11 bits is used to represent values from 0 to 2046 and mapped to the
values from 0 to 12, so that if Y1 represents the binary encoded value of
the first variable (X1’s) range, the length of the living room is computed
as:
X 1 Min ( X 1 )
100.0 x12.0
Y1
( 22)
where Min (X1) = 2.44 (minimum length of the living room. The GA
therefore codes for the range from 0 through 12 in increments of
12.0/20.48. Increasing the number of buts for Y1 by 1 results in a
precision of 12/40.96, so that the minimum and maximum lengths and
widths of rooms are represented in the encoding.
33
xxxviii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Violation of constraints on area, proportion, door and wall alignments
take the form of penalties which increase the total cost. Thus the
function to be minimised – the objective or evaluation function –
becomes:
zcost = X1X2 + 2X3X4 + 9350 (cost of bath in N year2005) +
+ 1.68 (X2 - 2.59) + X4X5 + X6X7 + X6X8 + penalties
(23)
from this analysis, GA can now work on the encoded design problem in
the following stages( model of analysis, synthesis and evaluation):
Starting with an initial random population of solution encoded as
described above
Selection evaluate candidate solution
Crossover and mutation synthesize new solution
The minimum cost by sequential linear programming (an optimisation
technique that first converts problem to a linear on and then solve it) is
715.98 units and this solution violates some of the constraints.
When considering a population of 30, crossover probability of 0.9 and
mutation of 1% (0.01), GA finds that the costs range from 689.30 to
752.92 with various degrees and types of constraints violations. One can
choose among the solutions.
10.3
10.3.1
Example 3
Optimization model
Variables in this example represent those parameters that define a
building design and were passed to a building simulation program. For
example, window-type is a variable in the system. Several window types
can be set as alternatives to other window types to the designer’s
requirement. Some variables such as window type can only be of
discrete type while some variables (e.g., orientation) can be either
continuous or discrete.
In this example, the types of buildings considered are limited to a
rectangular shape with known total floor area. Figure 9 illustrates the
definition of some variables, as proposed by Weimin et al (2003). These
are:
Building Orientation (Orientation)
xxxix34
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Aspect Ratio (aspect Ratio) defined as a/b, where a and b are shown
in Figure 9.
Window Type (WinType).
Window area ratio for each building façade (WinRatio)
Wall Type (WallType) in terms of materials
a
Side 3
Side 4
Side 2
North
(building)
Orientation 30
True North
Fig. 9 Definition of orientation and aspect ratio.
Each layer of wall (WallLayer). The total number and the
arrangement of layers are dependent on wall type.
Roof Type (RoofType).
Because it is essential to explore the relationship between economical
performance and environmental performance, Life cycle Cost and LifeCycle Environmental impact (LCEI) are coupled together using weighted
secularization method. Assuming (x) as the variable vector, the
integrated objective function F(x) can be expressed as:
F(x) = w1 LCEI (x) + w2 LCC (x)
(24)
xl
35
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
where w1 and w2 are predefined weights for life-cycle environmental
impact and life-cycle cost respectively. LCEI is the life-cycle
environmental impact using energy as an indicator criterion, LCC.= lifecycle cost for service. If the weights were reversed and set to (w1 = 1
and w2 = 0) then all the emphasis is placed on minimizing the variance
of the objective function without regard to the mean. There are an
infinite number of possible weights that are each Pareto optimal, in
which its solution is not possible to improve one of the objectives
without worsening the others. The weighted sum approach does not
generate all the Pareto solutions for some problem, but since this work
is focusing on the extreme points of the Pareto front, adoption of this
method is adequate (Parkinson et al, 1998). The general expression (for
construction and operational or services) to calculate LCEI is:
LCEI (x) = EE (x) + OE (x)
(25)
where EE = Embodied energy, that is the expanded cumulative exergy
consumption due to building construction and is assumed 0 initially,
because most of the sources data before the commencement of the
construction are not certain and that the building is assumed not yet in
service, and only OE which is the operating energy is considered as the
expended cumulative exergy consumption due to building operation and
service. EE (x) and OE (x) were employed in the analysis when the
building is assumed in service. The general expression to calculate LCC
is:
LCC (x) = IC(x) + OC (x)
(26)
where, IC = Construction cost due to waste emission, was not as well
considered initially in the analysis because the analytical building was
assumed not to be in service, but are used during the service life, OC =
Operating and service cost, including both demand and energy
consumption costs.
In this example however, the building load calculations is coupled with
the optimization model to estimate the annual peak energy consumption
and demand (CExC) due to ventilation in the room as the results of heat
produced (QH) by human, lighting (QL), electric motor engine (QE),
radiation by heater or wall materials(QR) and ventilators (fan or air
conditioner) (QV).
36
xli
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
10.3.2.
A A Adedeji
Structured genetics algorithm
The selection of an optimization algorithm depends on the peculiarities
of a problem domain. The previous formulated problem in equations
(24) to (26) has the following characteristics:
If the following variables and corresponding number of alternatives
(the number in parenthesis) are considered: orientation (2), aspect
Ratio (1), WinType (3), WallType (3), RoofType (1), WinRatio (1),
each WallLayer (1), then there are about 2xE6 or 2.5xE10 possible
solutions to explore.
Both continuous and discrete variables may exist in the same
optimization problem.
The shape of criteria space is unknown.
Genetic Algorithms (GAs) are good at exploring large search space
because of its implicit parallel computation mechanism. The binary string
representation can deal with both continuous and discrete variable.
Compared with conventional numerical methods, genetic algorithms are
able to locate global optimum without trapping into local extreme point.
All these advantages determine that GA is an appropriate candidate to
solve the above formulated problem. Structured GA lies in its redundant
genetic materials and a genetic activation mechanism.
10,3,3
Problem formulation
The 14th (last) floor of a multi-story (Shell House) office building located
in Lagos Island, Nigeria, is a building in which the environmental and
physical data has been measured and used in this example. The results
of measurement and data (size of the rooms, area of opening sizes and
types, wall materials and finishes, electrical lighting, fans and airconditioning power outputs) used were parts of the work carried out by
Ojediran (2004). The floor plan has a total area of 238.336m2 with 50year life expectancy.
The following assumptions (materials, and other physical properties)
were made and used in the analysis:
Only the energy, consumed in the hot season of March, April and
May, has been used in the analysis.
Rooftop units of aluminum are assumed to be used.
xlii
37
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Two wall types are considered; cement plastered straw bale and
sandcrete block (used for the construction of the specimen building)
walls. Other properties are shown in Table 7.
Because the sizes of the relatively expensive windows were small,
even in the best energy-performance cases, the size values are not
used in the analysis.
Only one roof type has been considered with asbestos cement
hanging ceiling, shielding the heat away from the room. So, the
energy factor, through the roof at this stage, is negligible and it was
not used in the analysis.
Table 7. Average properties of materials
Properties
Strawbale wall
Sandcrete wall
Size, L x B x H (mm)
1066 x 406.4 x 584
445 x 215 x 215
Density (kg/m3
9300
1500
U-value (W/m2K)
0.13 (of 420mm thick)
1.73 (of 250mm thick)
R-value (m K/W)
13.21(of 420mm thick)
0.58 (of 250mm thick)
Reliability of wall
0.89
0.77
Note: U –value = thermal conductivity, R-value = thermal resistivity
Energy factors produced and consumed during the three months as the
annual peak energy consumption and demand (CExC) in section 3.1 are
shown in Table 8 and were obtained using equations (a1) to (a5) in
Appendix III.).
Table 8. Energy consumed per hour
Energy
factor
QH
QL
QE
QR
QV
Total
Energy consumed (MJ)
Strawbale wall
Sandcrete wall
South East
East
South East
East
0.076
0.076
0.362
0.362
0.476
0.476
0.133
0.133
0.162
0.162
0.567
0.567
0.059
0.067
0.222
0.222
1.417
1.417
6.909
6.909
2.190
2.190
8.193
8.193
Note: (QH) by human, lighting (QL), electric motor engine (QE), radiation by
heater or conduction from sun’s heat through wall materials(Q R) and
ventilators (fan or air conditioner) (QV).
xliii
38
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
For definitions of the energy factors, see Appendix IV.
Cumulative energy consumption per hour is 2.190 MJ for the building
walls built with strawbale and 8.193 MJ for the building with sandcrete.
The general inflation rate, discount rate, and energy escalation rate of
30% is not included in the computation as that varies and the addition
could be made as required. In October 2005, the electricity rate was
N5.187/h (kW) of billing demand of the electricity consumption.
Single glazing is the window panel-type used for this building. There are
two wall types: masonry sandcrete block wall built as infill into the
reinforced concrete frame. In this analysis, the first wall type is
composed of cement plastered strawbale as shown in Fig. 10a. The
second wall type is composed of sandcrete blocks, and finished with
cement plasters as shown in Fig.10b. The south-wall absorptivity was
always at high values, either 0.6 or 0.8 while the north-wall absorptivity
had more random values, because solar gains were not significant in
that direction. Hence, its absorptivity values were not used in the
analysis.
Plaster – Strawbale – Plaster
Plaster – Sandcrete - Render
Direction of
Environmental
Microclimatic
conditions Region
tplaster
tstraw
tplaster
tplaster
t
tsandcrete
tplaster
t
Figure 10 Sections of the walls
Another set of simulation was done with the building rotated by 30o so
that it would face South-East. Energy-consumption levels were always
higher for this orientation than for South-North, as expected. However,
costs remained lower,
Considered Genetic algorithms operations are:
-
Global search algorithms: GA
Local search algorithm: gradient method
xliv 39
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
-
A A Adedeji
Population size: 20
Crossover rate 0.1
Mutation; 0.1
Reproduction rate: 2 offsprings
Generations: 3 of 0.15
Tournament selection and elitist strategy are used in this GA
implementation.
10.4.
Results and Conclusion
Four weighting sets are used in this example. The two extreme cases
(case 1 and case 3) are actually single performance criterion
optimization with the life cycle environmental impact and life-cycle cost
as the objective function respectively. The minimum function value was
obtained from the two extreme weighting cases 2 and 4. The
programme for each weighting set are used to normalize the life-cycle
environmental impact and life-cycle cost in weighting sets are used to
normalize the life-circle environmental impact and life –cycle cost in
weighting case 2 and 4. The optimal values of variables obtained from
the best run of each weighting set are presented in Table 9 and in Figs
11 and 12. It can be seen from this table and the figures that:
(1) The optimal aspect ratio is about 0.33 when the optimization
criterion is the life-cycle environmental impact, for the strawbalewalled building and 0.80 for the life-cycle cost for sandcrete-walled
building.
(2) When environmental performance is the only criterion, the plastered
strawbale walled building is economically viable than the building of
sandcrete walls. However, sandcrete block wall is recommended
when the life-cycle cost is considered in the overall criterion.
(3) The minimum allowed window area is preferred for both
environmental and economical performance.
(4) Threshold is 0.48 in the sandcrete walled building and 076 in
strawbale house when considering the cost of material and service
as a design criterion.
(5) At the weight value of 1, the energy consumption of the two wall
materials is the same. It was observed that the energy consumption
of strawbale house increases with time, but decreases in the building
of sandcrete walls.
40
xlv
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Table 9 Optimal values of variables from the weighting sets
Variables &
performanc
e
Orientation
Aspect
ration
WinRatio
WallType 1
(Strawbale)
WallType 2
(Sandcrete)
w1=0.7,
w2=0.3
1
w1=0.3,
w2=0.7
2
w1=1, w2=0
3
W1=0, w2=1
4
30
0.1
0
0.9
0
0.8
0
0.33
0.54
1
0.54
1
0.54
1
0.54
1
1
1
1
1
SB
7.71
E4
7.39
E6
LCEI (MJ)
LCC (N)
SC
1.0853
E5
3.245
E7
SB
4.778
E3
3.6240
E7
SC
1.309
E5
1.398
E7
SB
2.753
E4
1.057
E7
SC
1.5062
E5
1.507
E4
SB
1.0062
E5
4.6315
E7
SC
8.500
E4
9.030
E4
COST DUE TO
MATERIAL AND
6
SERVICES (LCC) x10
(N)
Note: LCEI = Life-cycle by environmental impact due to energy resource
consumption, LCC =cost due to service. SB = strawbale wall, SC = sandcrete
block wall. Note: 1N = $0.0074 (Nov., 2007).
80
Sandcrete wall R2 = 0.4617
60
40
Strawbale wall, R2 = 0.7824
20
0
-20
0
0.3
0.7
1
ENERGY
CONSUMPTION ON LIFECYCLE (L CEi) MJ
WEIGHTS (w 1 and w 2)
Figure 11 Priority cases (w1, w2) due to life cycle for cost
criteria on microclimate condition
40
35
Sandcrete wall, y = -11.237Ln(x) + 37.18
30
25
20
15
10
Strawbale wall, y = 12.926Ln(x) + 4.8086
5
0
0
0.3
0.7
WEIGHTS (w1, w2)
Figure 12. Priority cases(w1, w2) due to life-cycle
for energy consumption on microclimate
xlvi
41
1
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
The building performance corresponding to each optimal solution is also
shown at the bottom of Table 9. The evolution of the best solution ever
found for life-cycle environmental impact and life-cycle cost in Figure 11.
The process evolves rapidly during the first 30 generations and then
slowly at later generations. This demonstrates that genetic algorithms
can perform better in locating the optimal region than in local search. It
can be observed that the optimization is effective to improve building
performance. In Figs 11 and 12, it is shown that cost of materials and
the service is low in a sandcrete walled building during its life cycle. The
strawbale building consumes less energy during its early service at the
weighted value of 1. it is shown in Fig. 13 that strawbale walled building
resists environmental impact than the sandcrete-walled house at the
generation of 0.6 and 0.1 respectively.
1.2
Sandcrete wall
FITTNESS
1
Strawbale wall
0.8
0.6
0.4
0.2
0
10
20
30
40
50
60
GENERATION
Figure 6 Life-cycle environmental impact convergence.
Exergy, which is also an example stated in this book, is a useful concept
to be employed in life-cycle environmental optimization problems. It can
overcome the difficultly brought by integrating impacts with varied
magnitudes and units. With expanded cumulative energy consumption,
the optimization problem can be simplified by incorporating all impact
categories into one objective function.
The results have shown the threshold of 0.48 in the sandcrete walled
building and 076 in strawbale house when considering the cost of
material and service as a design criterion.
42
xlvii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
At the weight value of 1, the energy consumption of the two wall
materials is the same. It was observed that the energy consumption of
strawbale house increases with time, but decreases in the building of
sandcrete walls.
43
xlviii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
11 Conclusion and Recommendations
This book has illustrated how genetic algorithms model the design
process. They mirror the three-stage model of analysis, synthesis and
evaluation searching through a large space of possible designs for nearoptimal structures. In interactive systems where human designers can
help evaluate ill-defined criteria (beauty, elegance etc.), GAs only need
pairwise comparisons of candidate solutions and do not need other more
time consuming evaluations. Because of its simplicity and ease of coding
the floating point GA procedure described here can be applied to a wide
variety of optimization problems. It has been shown here that GA can be
also used successfully in the discrete weight optimization of structures.
Despite the large design space of permissible solutions, the procedure
converged rapidly towards the best possible solution. A floor-planning
problem was used to illustrate the issues involved in analyzing and
encoding a problem for a genetic algorithm.
Nevertheless, there are problems. Usually, domain information resides in
the evaluation function, but performance of a GA depends on the
suitability of the encoding. That is, whether it follows the two principles
of GA encodings. Domain knowledge also plays a large part in deciding if
a particular encoding is appropriate. But given the same problem and
encoding, is a genetic algorithm expected to perform better than other
blind search algorithms? And whatever the underlying values of a
knowledge-base and its representation, there is first the problem of
encoding this domain knowledge for a GA. Third, although GAs may be
expected to invent new designs, analysis of why the design works and
what are its strong and weak points is difficult. Finally, the time to
convergence -- the time that a GA should run -- must be bounded before
a computational tool can be advanced.
Because the economical performance and environmental performance
cannot take optimal values at the same time, a multi-criteria
optimization model is highly useful for decision-making in an
environmental – friendly building design. A disadvantage of the weighted
scarlarization technique is that only one optimal value is obtained for
each weighting set. Different weighting sets need to be tested to explore
different optimal solution. Nevertheless, the application of the weighted
values gives the quick view of the conditions to take into consideration
in design.
44
xlix
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
12. References
Ayres, R.U., Ayres, L.W., and Martinas, K. (1998), Energy, waste
accounting, and life-cycle analysis, Energy, Vol.23, No5,pp.351-363.
Barnthouse, L., Noesen, S. Norris, G., Owens, J., (1998), .Life cycle
impact assessment: The state – of- the art, 2nd edition, Setac press,
Pensacola, FL.
British Standards, BS 5950, Steel Design, BSI, London
Cai, J and Thierauf, G. (1993) Discrete structural optimization using
evolution strategies, Technical Report, Dept. of Civil Eng., University of
Essen, Essen, Germany.
Caldas, L. G. and Norford, L. K. (2003), Genetic algorithms for
optimization of building envelopes and design and control of HVAC
system, Journal of Solar Energy Environment, Vol. 125, pp.343 - 350
Coello, C.A. (1994) Discrete optimization of trusses using genetic
algorithms, EXPERSYS-94, I.I.T.T., 331-336.
Coley, D.A. and Schukal, S. (2002). Low-energy design: Combining
computer-based optimization and human judgment, Building and
Environment, Vol.37, pp.1241-1247.
Dawkins, R, (1986) The blind watchmaker: Why the evidence of
evolution reveals a universe without design, W. W. Norton.
De Jong, K. A. (1975), An analysis of the behaviour of a class of genetic
adaptive systems, Doctoral dissertation, University of Michigan, Diss.
Abstract (No. 76-9381) on international 36(10), 51408.
Fain, B. and Rudnick, J. (1999), Conformations of closed DNA, Physical
Review E 60, 7239-7252.
Forrest , S. (1993) Genetic algorithms principles of natural selection
applied to computation, Science, Vol.261, pp.872 – 678.
45
l
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Finnveden, G. (1994). Methods for describing and characterizing
resource depletion in the context of life-cycle assessment, Technical
Report, Swedish Environmental Research Institute, Stockholm, Sweden.
Goldberg, D.E. and Samtani, M.P. (1986) Engineering optimization via
genetic algorithm, Proc. 9th Conf. on Electronic Computation, ASCE,
New York, NY, 471-484.
Galante, M. (1996) Genetic Algorithms as an Approach to Optimize
Real-World Trusses, Int J. Num. Meth. Engng.,39,361-382.
Gillet, V.,(2002) Reactant and product-based approaches to the design
of conbinatorial libraries, Journal of Computers Molecular Design, Vol.
16, pp 371 – 380.
Ghasemi, M.R., Hilton, E. and Wood, R. D. (1999) Optimization of
Trusses Using Genetic Algorithms for Discrete and Continuous variables,
Engineering Computations, 3, 272-301
Haupt, R. and Haupt, S. E., (1998) Practical genetic algorithms, John
Wiley & Sons.
Holland, J.H. (1975) Adaptation in Natural and Artificial Systems, The
University of Michigan Press, Ann Arbor.
Holland, J.H. (1992) Genetic algorithms, Scientific American, July 1992,
pp.66-72.
Jekayinfa, S. O.(2006). Energy consumption pattern of selected of
mechanical farms in South-Western Nigeria, The CIGRE Journal. Vol III.
Obayashi, S., Daisuke, S., Yukihiro, T. and Naoki, H. (2000)
Multiobjective evolutionary computation fro supersonic wing0shape
optimisation, IEEE Transactions on evolutionary computation, Vol.4,
No.2, pp.183 – 187.
Ojediran, A., (2004), Ventilation assessment in a strawbale walled
building, B.Eng. Project
submitted to the Departmrnt of Civil
Engineering, University of Ilorin, Ilorin, pp 1-71.
46
li
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Oviemuwo, A. O, (2001), The changing structure of Nigeria economy,
http//www.ela.doe.gov/emeu/merc/merc94/ei/ei_html
Porto, V., Fogel, D. and Lawrence. F. (1995) Alternative neural network
training methods, IEEE Expert, Vol.10 No.3, pp.16-22
Radford, A. D. and Gero, J. S.(1998), design by optimisation in
architecture, building and construction, Van Nostrand Reinhold
Company, N.Y.
Rawlins, G. J. E.,(1991) Introduction . in Rawlins, G. J. E. editor,
Foundations of Genetic Algorithms 1, pp 1 – 12, Morgan Kaufmann.
Sasaki, D., Masashi, M., Obayashi, S. and Nakahashi, K. (2001)
Aerodynamic shape optimisation of supersonic wings by adaptive range
multiobjective genetic algorithms, First International Conference EMO
2001, Zurich., Proceedings, K. Deb, L. Theile, C, Coello, D. corne and E.
Zitler (Eds), Vol. 1993, pp.639 –452. Springer-Verlag.
Sato , S. K., Otori, A. Tukizawa, H., Sakai, Y. A and Kawamura, H.,
(2002) Applying genetic algorithms to the optimum design of a concert
hall, journal of sound and Vibration, Vol.258 No.3, pp.517 –526.
Stump, D. M. Fraser, W. B. and Gates, K. E. (1997), The writhing of
circular cross-section rods: undersea cables to DNA supercoils, Proc. R.
Soc.Lond. A454, 2125 – 2156 Arbor.
Wang, X, Jiye, T.,(2002) Parallel multi-frontal algorithm for structural
shakedown analysis, Journal of Northeastern University, Vol.23,No.51,
pp.115 –117.
Weimin, W., Hugues, R., Radu, G. Z.(2003), Optimizing building design
with respect to life-cycle environmental impacts, 8th International
Conference, Eindhoven, Netherlands, pp 1355-1361.
47
lii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Appendix I
Binary/Decimal Conversion
Conversion to and from other numeral systems
Decimal
To convert from a base-10 integer numeral to its base-2 (binary) equivalent, the number is divided
by two, and the remainder is the least-significant bit. The (integer) result is again divided by two, its
remainder is the next most significant bit. This process repeats until the result of further division
becomes zero.
For example, 11810, in binary, is:
Operation
Remainder
118 ÷ 2 = 59 0
59 ÷ 2 = 29 1
29 ÷ 2 = 14 1
14 ÷ 2 = 7
0
7÷2=3
1
3÷2=1
1
1÷2=0
1
To convert from base-2 to base-10 is the reverse algorithm. Starting from the left, double the result
and add the next digit until there are no more. For example to convert 1100101011012 to decimal:
Result
Remaining digits
0
110010101101
0×2+1=1
10010101101
1×2+1=3
0010101101
3×2+0=6
010101101
6 × 2 + 0 = 12
10101101
12 × 2 + 1 = 25
0101101
25 × 2 + 0 = 50
101101
50 × 2 + 1 = 101
01101
101 × 2 + 0 = 202
1101
202 × 2 + 1 = 405
101
405 × 2 + 1 = 811
01
811 × 2 + 0 = 1622 1
1622 × 2 + 1 = 3245
The result is 324510.
The fractional parts of a number are converted with similar methods. They are again based on the
equivalence of shifting with doubling or halving.
In a fractional binary number such as .110101101012, the first digit is
, the second
, etc. So if there is a 1 in the first place after the decimal, then the number is at least , and vice
versa. Double that number is at least 1. This suggests the algorithm: Repeatedly double the number
to be converted, record if the result is at least 1, and then throw away the integer part.
liii
48
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
For example,
10, in binary, is:
Converting
A A Adedeji
Result
0.
0.0
0.01
0.010
0.0101
Thus the repeating decimal fraction 0.3... is equivalent to the repeating binary fraction 0.01... .
Or for example, 0.110, in binary, is:
Converting
Result
0.1
0.
0.1 × 2 = 0.2 < 1 0.0
0.2 × 2 = 0.4 < 1 0.00
0.4 × 2 = 0.8 < 1 0.000
0.8 × 2 = 1.6 ≥ 1 0.0001
0.6 × 2 = 1.2 ≥ 1 0.00011
0.2 × 2 = 0.4 < 1 0.000110
0.4 × 2 = 0.8 < 1 0.0001100
0.8 × 2 = 1.6 ≥ 1 0.00011001
0.6 × 2 = 1.2 ≥ 1 0.000110011
0.2 × 2 = 0.4 < 1 0.0001100110
The final conversion is from binary to decimal fractions. The only difficulty arises with repeating
fractions, but otherwise the method is to shift the fraction to an integer, convert it as above, and
then divide by the appropriate power of two in the decimal base. For example:
X
= 1100
.101110011100...
= 1100101110 .0111001110...
= 11001
.0111001110...
= 1100010101
X
= (789/62)10
Another way of converting from binary to decimal, often quicker for a person familiar with
hexadecimal, is to do so indirectly—first converting (x in binary) into (x in hexadecimal) and then
converting (x0
Representing real numbers
Non-integers can be represented by using negative powers, which are set off from the other digits
by means of a radix point (called a decimal point in the decimal system). For example, the binary
number 11.012 thus means:
liv49
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
1 × 21 (1 × 2 = 2)
plus
1 × 20 (1 × 1 = 1)
plus
-1
0 × 2 (0 × ½ = 0)
A A Adedeji
plus
1 × 2-2 (1 × ¼ = 0.25)
For a total of 3.25 decimal.
All dyadic rational numbers
have a terminating binary numeral—the binary representation has a
finite number of terms after the radix point. Other rational numbers have binary representation, but
instead of terminating, they recur, with a finite sequence of digits repeating indefinitely. For
instance
=
= 0.0101010101...2
=
= 0.10110100 10110100 10110100...2
The phenomenon that the binary representation of any rational is either terminating or recurring
also occurs in other radix-based numeral systems. See, for instance, the explanation in decimal.
Another similarity is the existence of alternative representations for any terminating representation,
relying on the fact that 0.111111... is the sum of the geometric series 2-1 + 2-2 + 2-3 + ... which is
1.
Binary numerals which neither terminate nor recur represent irrational numbers. For instance,
0.10100100010000100000100.... does have a pattern, but it is not a fixed-length
recurring pattern, so the number is irrational
1.0110101000001001111001100110011111110... is the binary representation of
,
the square root of 2, another irrational. It has no discernible pattern, although a proof
that
is irrational requires more than this. See irrational number.
[edit] References
1. ^ W. S. Anglin and J. Lambek, The Heritage of Thales, Springer, 1995, ISBN 038794544X
online
2. ^ Bacon, Francis The Advancement of Learning, Book 6, Chapter 1, 1605. Online here.
lv 50
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Appendix II
PseudoCode
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
proc Step_Up(cea) :
for s = 1 to MAX_STEPS do
for x = 1 to WIFTH do
for y = 1 to HEIGHTdo
n_list = Compute_Neigh(cea, position(x,y)) ;
Selected_inds = Perform_Selection(n_list) ;
aux_pop = Apply_Reproduction_Operators(selected_index) ;
end_for ;
end-for ;
cea= Replace(cea, aux-pop) ;
Evaluate>population(cea) ;
end_for ;
end_proc STEP_UP ;
OseudoCode of a simple GA
Move the pointer over the words
Present a brief explanation with the mean of the main algorithm’s line
LINE 2
The algorithm runs until one of the two following stopping conditions is satisfied:
The algorithm finds an optimal solution to the problem
The algorithm reaches a certain number of generation (represented by MAX_STEPS)
without finding an optimal solution and stops
LINE 3 and 4
In such generation, the algorithm examines all the individuals of the population. This
population is hold in a 2_D toroidal grid shape of size WIGTH x HEIGHT (more details).
LINE 5
The neighbours of the individual placed on position (x, y) are stored in an empty list.
LINE 6
The parents of the individual of position (x, y) are selected from the list created in line 5
and placed in a neqw list.
Line 7
The parents of the individual of position (x,y) are selected from the list created in line 5
and placed in a new list
LINE
LINE
LINE
LINE
LINE
9 End
10 Replace
11 Evaluate fo the population
12 End
13: set up
lvi 51
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
APPENDIX III
Flowchart (Executional Steps) of Genetic Programming
Genetic programming is problem-independent in the sense that the flowchart specifying
the basic sequence of executional steps is not modified for each new run or each new
problem.
Figure III below is a flowchart showing the executional steps of a run of genetic
programming. The flowchart shows the genetic operations of crossover, reproduction,
and mutation as well as the architecture-altering operations. This flowchart shows a twooffspring version of the crossover operation.
Figure II Executional Steps for genetic algorithms
Overview of Flowchart
Genetic programming starts with an initial population of computer programs composed
of functions and terminals appropriate to the problem. The individual programs in the
lvii
52
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
initial population are typically generated by recursively generating a rooted point-labeled
program tree composed of random choices of the primitive functions and terminals
(provided by the user as part of the first and second preparatory steps of a run of
genetic programming). The initial individuals are usually generated subject to a preestablished maximum size (specified by the user as a minor parameter as part of the
fourth preparatory step). In general, the programs in the population are of different size
(number of functions and terminals) and of different shape (the particular graphical
arrangement of functions and terminals in the program tree).
Each individual program in the population is executed. Then, each individual program in
the population is either measured or compared in terms of how well it performs the task
at hand (using the fitness measure provided in the third preparatory step). For many
problems (including all problems in this book), this measurement yields a single explicit
numerical value, called fitness. The fitness of a program may be measured in many
different ways, including, for example, in terms of the amount of error between its
output and the desired output, the amount of time (fuel, money, etc.) required to bring
a system to a desired target state, the accuracy of the program in recognizing patterns
or classifying objects into classes, the payoff that a game-playing program produces, or
the compliance of a complex structure (such as an antenna, circuit, or controller) with
user-specified design criteria. The execution of the program sometimes returns one or
more explicit values. Alternatively, the execution of a program may consist only of side
effects on the state of a world (e.g., a robot’s actions). Alternatively, the execution of a
program may produce both return values and side effects.
The fitness measure is, for many practical problems, multi-objective in the sense that it
combines two or more different elements. The different elements of the fitness measure
are often in competition with one another to some degree.
For many problems, each program in the population is executed over a representative
sample of different fitness cases. These fitness cases may represent different values of
the program’s input(s), different initial conditions of a system, or different environments.
Sometimes the fitness cases are constructed probabilistically.
The creation of the initial random population is, in effect, a blind random search of the
search space of the problem. It provides a baseline for judging future search efforts.
Typically, the individual programs in generation 0 all have exceedingly poor fitness.
Nonetheless, some individuals in the population are (usually) more fit than others. The
differences in fitness are then exploited by genetic programming. Genetic programming
applies Darwinian selection and the genetic operations to create a new population of
offspring programs from the current population.
The genetic operations include crossover (sexual recombination), mutation,
reproduction, and the architecture-altering operations. These genetic operations are
applied to individual(s) that are probabilistically selected from the population based on
fitness. In this probabilistic selection process, better individuals are favored over inferior
individuals. However, the best individual in the population is not necessarily selected and
the worst individual in the population is not necessarily passed over.
After the genetic operations are performed on the current population, the population of
offspring (i.e., the new generation) replaces the current population (i.e., the now-old
53
lviii
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
generation). This iterative process of measuring fitness and performing the genetic
operations is repeated over many generations.
The run of genetic programming terminates when the termination criterion (as provided
by the fifth preparatory step) is satisfied. The outcome of the run is specified by the
method of result designation. The best individual ever encountered during the run (i.e.,
the best-so-far individual) is typically designated as the result of the run.
All programs in the initial random population (generation 0) of a run of genetic
programming are syntactically valid, executable programs. The genetic operations that
are performed during the run (i.e., crossover, mutation, reproduction, and the
architecture-altering operations) are designed to produce offspring that are syntactically
valid, executable programs. Thus, every individual created during a run of genetic
programming (including, in particular, the best-of-run individual) is a syntactically valid,
executable program.
There are numerous alternative implementations of genetic programming that vary from
the foregoing brief description.
Creation of Initial Population of Computer Programs
Genetic programming starts with a primordial ooze of thousands of randomly-generated
computer programs. The set of functions that may appear at the internal points of a
program tree may include ordinary arithmetic functions and conditional operators. The
set of terminals appearing at the external points typically include the program's external
inputs (such as the independent variables X and Y) and random constants (such as 3.2
and 0.4). The randomly created programs typically have different sizes and shapes..
Main Generational Loop of Genetic Programming
The main generational loop of a run of genetic programming consists of the fitness
evaluation, Darwinian selection, and the genetic operations. Each individual program in
the population is evaluated to determine how fit it is at solving the problem at hand.
Programs are then probabilistically selected from the population based on their fitness to
participate in the various genetic operations, with reselection allowed. While a more fit
program has a better chance of being selected, even individuals known to be unfit are
allocated some trials in a mathematically principled way. That is, genetic programming is
not a purely greedy hill-climbing algorithm.
The individuals in the initial random population and the offspring produced by each
genetic operation are all syntactically valid executable programs.
After many generations, a program may emerge that solves, or approximately solves,
the problem at hand.
Mutation Operation
In the mutation operation, a single parental program is probabilistically selected from the
population based on fitness. A mutation point is randomly chosen, the subtree rooted at
that point is deleted, and a new subtree is grown there using the same random growth
process that was used to generate the initial population. This asexual mutation operation
is typically performed sparingly (with a low probability of, say, 1% during each
generation of the run).
lix 54
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
Crossover (Sexual Recombination) Operation
In the crossover, or sexual recombination operation, two parental programs are
probabilistically selected from the population based on fitness. The two parents
participating in crossover are usually of different sizes and shapes. A crossover point is
randomly chosen in the first parent and a crossover point is randomly chosen in the
second parent. Then the subtree rooted at the crossover point of the first, or receiving,
parent is deleted and replaced by the subtree from the second, or contributing, parent.
Crossover is the predominant operation in genetic programming (and genetic algorithm)
work and is performed with a high probability (say, 85% to 90%).
Reproduction Operation
The reproduction operation copies a single individual, probabilistically selected based on
fitness, into the next generation of the population.
Architecture-Altering Operations
Simple computer programs consist of one main program (called a result-producing
branch). However, more complicated programs contain subroutines (also called
automatically defined functions, ADFs, or function-defining branches), iterations
(automatically defined iterations or ADIs), loops (automatically defined loops or ADLs),
recursions (automatically defined recursions or ADRs), and memory of various
dimensionality and size (automatically defined stores or ADSs). If a human user is trying
to solve an engineering problem, he or she might choose to simply prespecify a
reasonable fixed architectural arrangement for all programs in the population (i.e., the
number and types of branches and number of arguments that each branch possesses).
Genetic programming can then be used to evolve the exact sequence of primitive workperforming steps in each branch.
However, sometimes the size and shape of the solution is the problem (or at least a
major part of it). Genetic programming is capable of making all architectural decisions
dynamically during the run of genetic programming. Genetic programming uses
architecture-altering operations to automatically determine program architecture in a
manner that parallels gene duplication in nature and the related operation of gene
deletion in nature. Architecture-altering operations provide a way, dynamically during the
run of genetic programming, to add and delete subroutines and other types of branches
to individual programs to add and delete arguments possessed by the subroutines and
other types of branches. These architecture-altering operation quickly create an
architecturally diverse population containing programs with different numbers of
subroutines, arguments, iterations, loops, recursions, and memory and, also, different
hierarchical arrangements of these elements. Programs with architectures that are wellsuited to the problem at hand will tend to grow and prosper in the competitive
evolutionary process, while programs with inadequate architectures will tend to wither
away under the relentless selective pressure of the problem's fitness measure. Thus, the
architecture-altering operations relieve the human user of the task of prespecifying
program architecture.
There are several different architecture-altering operations (described below). They are
each applied sparingly during the run (say, with a probability of 1/2% of 1% on each
generation).
55
lx
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
The subroutine duplication operation duplicates a preexisting subroutine in an individual
program gives a new name to the copy and randomly divides the preexisting calls to the
old subroutine between the two. This operation changes the program architecture by
broadening the hierarchy of subroutines in the overall program. As with gene duplication
in nature, this operation preserves semantics when it first occurs. The two subroutines
typically diverge later, sometimes yielding specialization.
The argument duplication operation duplicates one argument of a subroutine, randomly
divides internal references to it, and preserves overall program semantics by adjusting all
calls to the subroutine. This operation enlarges the dimensionality of the subspace on
which the subroutine operates.
The subroutine creation operation can create a new subroutine from part of a main
result-producing branch thereby deepening the hierarchy of references in the overall
program, by creating a hierarchical reference between the main program and the new
subroutine. The subroutine creation operation can also create a new subroutine from
part of an existing subroutine further deepening the hierarchy of references, by creating
a hierarchical reference between a preexisting subroutine and a new subroutine and a
deeper and more complex overall hierarchy.
The architecture-altering operation of subroutine deletion deletes a subroutine from a
program thereby making the hierarchy of subroutines either narrower or shallower
The argument deletion operation deletes an argument from a subroutine thereby
reducing the amount of information available to the subroutine, a process that can be
viewed as generalization.
Other architecture-altering operations add and delete automatically defined iterations,
automatically defined loops, automatically defined recursions, and automatically defined
stores (memory).
56
lxi
University of Ilorin, Ilorin, Nigeria
Department of Civil Engineering
A A Adedeji
APPENDIX IV
Definitions of Symbols
QH = Ψ(He, Hc,, Hr,, Hs)
(a1)
where He is Heat loss due to evaporation, Hc is the heat loss/gained by convention, Hr is
the heat gained by radiation and Hs is the restored in the body.
QL = Ψ(P, c1, c2),
(a2)
where P is the total energy loss due to radiation, c1 = coefficient of light which depends
on the production of heat and c2 = coefficient of electric light (average of 13.0)
QE = Ψ(c3, c4, n, m)
(a3)
where c3, c4 are coefficients for moving electric motor (average of 0.7), residual
coefficient (1.0), n = power of motor(maximum of 3000 Watts and m is the motor
efficiency ranging from 0.5 kW to 40 kW for efficiency of 70% to 92% respectively.
QR = Ψ(Ao, Aos, Lo, Co, S),
(a4)
where Ao is the effective window area of incoming air, Aos is the area of window exposed
to sun’s radiation Lo is total intensity of the sun heating the window, Co is the corrective
coefficient ( 1 for a city like Lagos, and1.5 for a rural area) and S is shadow coefficient
(ranging from 0.13 to 0.56 of a 45o opened but dark window to translucent semi-dark
open 450 illumination) for window glass panel.
QV = Ψ (V, Pv, nfa)
(a5)
where V is the air flow rate given off by ventilator, Pv is the total pressure of ventilation
nfa is the ventilation offect on the ventilator (= 0.5)
57
lxii