Preparation of Papers for AIAA Journals
advertisement

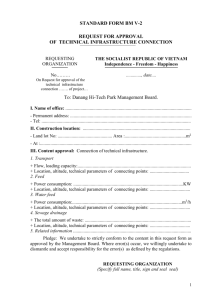
A Generic Wind Profile for University Sounding Rocket Ballistics Charles P. Hoult1 California State University Long Beach, Long Beach, California 90840 Introduction University sounding rockets are becoming more common on American college campuses as their use for aerospace engineering education expands. While larger than all but a handful of hobby rockets, they are much less powerful than the classical sounding rockets still used for atmospheric research. These are unguided, fin stabilized rockets having apogee altitudes from 1.5 to 8 km, implying the capability for considerable impact point displacement, especially if there are significant winds. For reasons both of range safety and ease of recovery, impact point location management matters. Trajectory displacements due to the winds traversed by a sounding rocket, if uncompensated, are by far the largest single cause of impact prediction error. Wind compensation for hobby rockets is extremely rare. On the other hand, all classical sounding rockets are wind-compensated for range safety reasons using techniques evolved from Lewis [1]. For them, wind fields are measured using a pair of theodolites to track a sequence of free pilot balloons prior to launch. Wind field data is then computer-processed to develop launcher rail azimuth and quadrant elevation angles to achieve a planned impact. University sounding rockets are too energetic for winds to be safely neglected altogether, but university budgets are usually far too tight to support a full theodolite-balloon tracking system. The solution [2] is to use a tethered pilot balloon to measure winds at a lower level in the planetary boundary layer supplemented by Federal Aviation Agency (FAA) aviation weather advisory winds aloft at a higher, synoptic altitude. University budgets can support this process since the tethered pilot balloon hardware can be acquired for less than $1000. Generic Wind Profiles Given access to a precision trajectory code, the measured wind data enables computation of a predicted impact point, and, if needed, the launcher rail azimuth and quadrant elevation angle changes to place the impact point at a desired location. If one were to follow Lewis [1] slavishly, the simulated wind field would be broken into two levels, one for the tethered pilot balloon data and one for the aviation weather data. However, the resulting two-step staircase wind profile hardly resembles real world wind profiles. There is also the issue of selecting an altitude to separate the two data sets: No rational technique exists for finding this separation altitude, a variable with considerable influence on the impact point location. Simulation with an unrealistic wind profile can lead to significant impact location errors. The simplest remedy is to fit curves through the two data sets and use the fitted curves in the trajectory simulation. Note that the wind field is a vector quantity so it is necessary to fit separate curves to the N-S and E-W components, and to simulate the trajectory consequences of both. Wind speeds generated by a fitted curve should vanish at the surface and pass through the measured data points with a high altitude asymptote close to the data point at the highest altitude. Obviously, there is no unique generic wind profile satisfying these conditions. However, all that is needed is a smooth profile consistent in character with general knowledge of turbulent boundary layer profiles [3]. Operationally speaking, high accuracy and rigor are unnecessary since only an approximately correct impact point is needed. The first generic profile explored was the classical power law [3]. It was rejected because its speed at high altitude was unbounded. Next, a simple exponential was studied: W A(1 exp( Bh )) , where W = wind speed, m/s, and h = altitude, m. The parameters A and B could be fit to the two measurements to provide a wind profile of satisfactory shape. Unfortunately, on the very first attempt to fit this curve to experimental data, it failed because the wind speed inside the planetary boundary layer was greater than that at higher altitude. 1 Adjunct Professor, Department of Mechanical and Aerospace Engineering, 1250 Bellflower Blvd, Long Beach CA 90840 AIAA Member Therefore, a revised generic profile that can be fitted to any combination of two measurements is suggested: W C (1 exp( h)) Dh exp( h) Here, too, the parameters C and D could be fit to the two measurements. A suggested value for the constant λ is 0.005/m which gives a generally satisfactory wind profile shape. The two typical profiles sketched below in Fig.1 illustrate the varieties of wind profile possible with this generic curve. The legend box contains the assumed data pair used to establish each profile. Wind 7 Speed, 6 5 4 3 6 m/s @ 250 m 4 m/s @ 1000 m 4 m/s @ 250 m 6 m/s @ 1000 m 2 1 0 0 500 1000 1500 Altitude, m Fig. 1 Typical Wind Profiles Summary A generic wind profile for university sounding rocket ballistics has been described. This suggested generic wind profile was successfully used to point the launcher rail for California State University Long Beach’s Gold Rush II entry in the Fifth Intercollegiate Rocket Engineering Competition, Green River UT, in 2010. References [1] Lewis, J.V., “The Effect of Wind and Rotation of the Earth on Unguided Rockets”, Ballistics Research Laboratories Report 685, 1948. [2] Buharie, M.F. and Mohamed, S., “A New Wind Sensor for Rocket Launches”, AIAA Region VI Student Research Competition, Phoenix, 2008. [3] Schlichting, H., and Gersten, K., Boundary-Layer Theory, Eighth Revised and Enlarged Edition, Springer-Verlag, New York, 2003.