Chapter 1
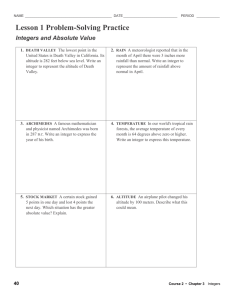
advertisement

2.1
Chapter 1
Introduction [A partial review of AERE 261 ]
1.2 BASIC DEFINITIONS
1.2.2 Pressure P F / A ; P / P0 where P0 is sea-level standard pressure ; P RT (ideal gas law).
1.2.3 Temperature T /T0 where T0 is sea-level standard temperature in an absolute scale.
1.2.4 Density / 0 where 0 is sea-level standard density.
1.2.5 Viscosity 0 (T / T0 )3 / 4 where the condition is ( ,T ) ,and a chosen reference condition is ( 0 , T0 ) .
1.2.6 Mach Number M V / a where V is the speed of the plane and a is the local speed of sound.
Incompressible subsonic: 0 M 0.5
Compressible subsonic: 0.5 M 0.8
Transonic: 0.8 M 1.2
Supersonic: 1.2 M 5
Hypersonic: 5 M
1.3 AEROSTATICS
1.3.1 Pressure Variation in a Static Fluid dP g dh where (h) may depend on h.
1.4 DEVELOPMENT OF BERNOULLI’S EQUATION (ignoring viscous effects)
From equations (1.20) to (1.25), along with Figure 1.5, we arrive at:
dV
1 dP
dz
g
dt
ds
ds
(1.26).
This equation highlights the fact that the total fluid acceleration is comprised of a component associated
with changing pressure dP / ds and a component due to gravity dz / ds .
Next, write:
dV V V ds
.
dt
t
s dt
(1.27)
This equation states that the total acceleration of an elemental mass of fluid is the sum of the acceleration
of the entire flow field, V / t plus the acceleration associated with the change in the elevation (see dz in
Figure 1.5) of the field V / s at a location s.
2.2
Equating the right sides of (1.26) and (1.27) gives:
V V ds
1 dP
dz
g .
t
s dt
ds
ds
(1.1*)
Definition 1. A steady flow field is one that has constant velocity; that is, V / t 0 .
In the case of a steady flow field, (1.1*) becomes:
V ds
1 dP
dz
g
s dt
ds
ds
.
(1.2*)
Noting that the constant velocity is V ds / dt and that now V / s dV / ds gives the differential form of
Bernoulli’s equation for steady flow:
V
dV
1 dP
dz
g
ds
ds
ds
.
(1.29)
From (1.29) the integral form of Bernoulli’s equation for steady flow between states 1 and 2 is:
2
2
1
1
VdV
dP
2
g dz .
(1.30)
1
1.4.1 Incompressible Steady State Flow
In this situation the density, , does not depend on pressure. If we also assume that it does not depend on
a change in elevation, z, then (1.30) becomes
2
2
2
1
1
1
VdV dP g dz .
(1.3*)
The integrals in (1.3*) are trivial to evaluate, giving:
P1
1
1
V12 g z1 P2 V22 g z2 .
2
2
Application to the stagnation pointFrom http://en.wikipedia.org/wiki/Stagnation_point we have the following:
(1.31)
2.3
In fluid dynamics, a stagnation point is a point in a flow field where the local velocity of the fluid is
zero.[1] Stagnation points exist at the surface of objects in the flow field, where the fluid is brought to rest
by the object. The Bernoulli equation shows that the static pressure is highest when the velocity is zero
and hence static pressure is at its maximum value at stagnation points. This static pressure is called the
stagnation pressure.[2][3]
The Bernoulli equation applicable to incompressible flow shows that the stagnation pressure is equal to
the dynamic pressure plus static pressure. Total pressure is also equal to dynamic pressure plus static
pressure so, in incompressible flows, stagnation pressure is equal to total pressure. [3] (In compressible
flows, stagnation pressure is also equal to total pressure providing the fluid entering the stagnation point
is brought to rest isentropically.)[4]
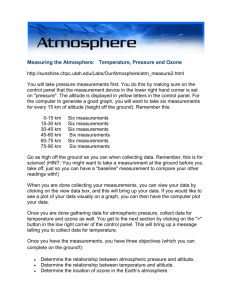
Kutta condition[edit] : On a streamlined body fully immersed in a potential flow, there are two
stagnation points—one near the leading edge and one near the trailing edge. On a body with a sharp point
such as the trailing edge of a wing, the Kutta condition specifies that a stagnation point is located at that
point. The streamline at a stagnation point is perpendicular to the surface of the body.
Photo showing stagnation point and attached vortex at an un-faired wing-root to fuselage junction on a
Schempp-Hirth Janus C glider
QUESTION: Why is the stagnation point important?
ANSWER: http://www.academia.edu/275031/Stagnation_Point_Flow_near_the_Continuum_Limit
“The importance of stagnation-point heat transfer in problems such as atmospheric reentry [6] and
other rarefied hypersonic flo w s [ 7] make estimating the heat transfer a problem of practical
engineering interest.”
Now let’s return to (1.31) for the case where ( P1,V1 ) ( P ,V ) is the free-stream condition (in the absence
of the body), and where ( P2 ,V2 ) ( Pstag ,0) corresponds to the stagnation point. If we assume z1 z2 , then
(1.31) gives:
Pstag P
1
V2 .
2
(1.32)
2.4
1.4.2 Bernoulli’s Equation for a Compressible Fluid
As noted above, for a Mach number M 0.5 the air is compressed. The pressure density relationship is:
P c
(1.33)
where, for air, the ratio of specific heats is 1.4 . From (1.33) we have
dP
c 1d
c 2d
c 1
cP
.
(c )
1
(
1
)
(
1)
(1.4*)
Substituting (1.4*) into the indefinite integral version of (1.30) gives:
1 2
cP
V
gz C
2
( 1)
(1.34)
where C is the integration constant. Once again, if we ignore the term gz , we obtain:
1 2
cP
V
C
2
( 1)
(1.34)
Application of (1.34) to the stagnation pointFor the two conditions ( P,V , ) and ( Pstag ,0, stag ) , use of (1.34) results in:
cPstag
1 2
cP
.
V
2
( 1) stag ( 1)
(1.35’)
Note that (1.35’) becomes (1.35) for c 1 . The author never explicitly states this. Rearranging (1.35’)
gives:
P /P
1 2 1
1 stag
.
V
stag /
2 c ( P / )
(1.36’)
At this point, the author ‘reminds’ us that the squared speed of sound in a gas is:
a 2 RT P / .
(1.37)
Hence, (1.36’) becomes:
Pstag / P
1 2 1
.
V 2 1
stag /
2 c a
Recalling that M V / a gives the alternative expression:
(1.5a*)
2.5
P /P
1
1 stag
.
M 2
stag /
2c
(1.5b*)
As a result of (1.33), we also have:
stag
.
P
Pstag
(1.38)
From (1.38) we have:
1/
stag Pstag
P
(1.6*)
.
Substituting (1.6*) into (1.5*) gives:
1 2 1
( 1) /
.
V 2 1 Pstag / P
2
c
a
(1.7a*)
1
1 Pstag / P ( 1) / .
M 2
2c
(1.7b*)
and
Finally, from (1.7*) we obtain:
(1.39’)
(1.40’)
V
2ca 2
Pstag / P ( 1) / 1 .
1
M
2c
Pstag / P ( 1) / 1 .
1
and
Again, notice that (1.39’) and (1.40’) contain the constant c, which must be assumed to equal one in order
to arrive at the author’s (1.39) and (1.40). Furthermore, as the author notes: these equations are only valid
for 0.5 M 1.0 . The author also notes that if one has measurements of the local free-stream pressure P
and Pstag , then one can find the plane velocity/Mach number.
2.6
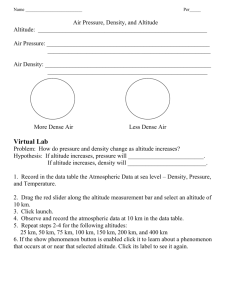
1.5 THE ATMOSPHERE
288.16o K 518.7o R
~ 220o K
Remark 1.5.1 The above figure describes the relation between altitude and temperature. Notice that the
Rankine scale is not at all accurate. For this reason, it is advised to use the Kelvin scale.
The thermal/altutude gradient for 0 h 10 km: dh / dT
220 288 .16
6.8o K / km .0068 o K / km .
10 0
2.7
Remark 1.5.2 On p.15 it is stated that “the properties of the atmosphere change with time and
location…”. Hence, Figure 1.7 should be interpreted as a relation between the mean tempreature as a
function of altitude.
Example 1.5.1 Suppose that the mean temperature can be expressed as T To h where
To 288.16o K and 6.8o / km (i.e. 0 h 10 km ). Suppose that the temperature variation is given by
T (h) ~ Normal (0, .01T ) . Then the actual temperature is T T T T0 h T also has a normal
distribution; specifically, it is T T (h) ~ Normal[To h ,.01(To h)] .
QUESTION: Why is uncertainty related to atmospheric quantities of such timely relevance?
ANSWER: Drones… small drones are much more suseptible to degraded performance than traditional
airplanes in uncertain and/or perturbed atmospheric conditions.
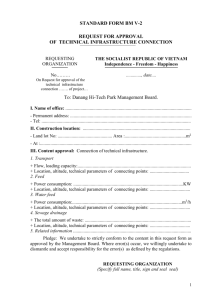
(a)Write a Matlab code that plots the mean temperature, as well as the upper and lower standard errors
(i.e. plot T To h as well as T To h 2[.01(To h )] (1 .02 )To (1 .02 h) .
Solution: The code that generated the following plot is given in the Appendix.
2.8
Mean Temperature and Standard Errors as a Function of Altitude
300
290
280
Temp. (K) )
270
260
250
240
230
220
210
0
2
4
6
8
10
Altitude (km)
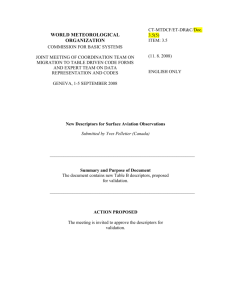
(b) Use the Matlab command ‘normpdf’ to plot the distribution of T at the altitude h 10 km .
Solution:
Distribution of T(h=10km)
0.2
0.18
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
212
214
216
218
220
222
Temperature (K)
224
226
228
2.9
(b) Use the Matlab command ‘normrnd’ to simulate 104 measurements of T at the altitude h 10 km .
Then use the command ‘hist’ in relation to this data to plot a 25-bin histogram of the temperatures.
Solution:
Histogram of 10
4
measurements of T(h=10km)
14000
12000
10000
8000
6000
4000
2000
0
210
215
220
225
Temperature (K)
230
235
(d) Does your histogram appear to be correct? Explain.
Answer: It is very similar to the theoretical distribution of part(b); both in location and spread. Hence, I
would say it is valid.
The point of this example was to illustrate how easy it is to gain an understanding of the uncertainty of
temperature via simulations. □
Definition 1.5.1 Let Ro denote the mean radius of the earth, and let hG denote the geometric altitude
above the earth surface. Then the absolute altitude is defined as ha hG Ro (1.41).
Now, recall that the general hydrostatic equation that relates a change in altitude to a change pressure is:
dP g dh .
(1.42)
Definition 1.5.2 If in (1.42) we use g g o , which is gravity at sea level, then the variable h is called the
geopotential altitude. In this case, we have
dP go dh .
(1.43)
If we use the value of gravity at the altitude h, we will then write (1.42) as
dP g dhG .
where hG is called the geometric altitude.
(1.44)
2.10
The equality of equations (1.43) and (1.44) gives:
dh ( g / go )dhG .
(1.44)
Further, it can be shown that the value of g at a geopotential altitude h is given by
Ro
g g o
Ro hG
2
.
(1.46)
Substituting (1.46) into (1.45) gives
Ro
dh
Ro hG
2
dhG .
(1.47)
To integrate (1.47) define the variable v Ro hG . Then dv dhG , and (1.47) becomes
dh Ro2 v 2 dv . Integrating (1.47) gives:
Ro hG
h
0
dh Ro2
v
2
(1.8*)
dv .
Ro
Crrying out this integration gives:
Ro hG
h Ro2 v 1
Ro
Ro
hG
1
R 2 1
Ro2
o
Ro Ro hG
Ro ( Ro hG ) Ro hG
hG
(1.48)
or
Ro
h
hG
Ro h
(1.49)
Finally, we can now arrive at the relation between pressure/density and altitude. To this end, for
convenience, we write (1.43) again as
dP go dh .
(1.50)
From section 1.2.2 we also have
P RT .
Dividing (1.50) by (1.51) gives:
(1.51)
2.11
dP g o
dh .
P
RT
(1.52)
We will assume that the temperature varies linearly as a function of altitude (per any chosen linear region
in Figure 1.7); specifically:
T T1 (h h1 ) .
(1.9*)
From (1.9*) and (1.52) we obtain:
P
P1
dP g o
P
R
h
T (h h ) .
dh
h1 1
(1.53)
1
The left side of (1.53) is clearly
P
P
dP
ln( P ) ln( P1 ) ln( P / P1 ) .
(1.10*)
P1
To integrate the right side of (1.53) define the variable v T1 (h h1 ) . Then dh dv / . And so the
right side of (1.53) becomes
gG
R
h
h1
go
dh
T1 ( h h1 )
R
T1 ( h h1 )
T1
dv g o T1 ( h h1 )
.
ln
v
R
T1
(1.11*)
From (1.10*) and (1.11*), (1.53) becomes
ln( P / P1 )
g o T1 (h h1 )
.
ln
R
T1
(1.54)
From (1.9*) we can also write (1.54) as
T
go T
ln( P / P1 )
ln ln
R T1
T1
go
R
(1.12*)
or
P T
P1 T1
go
R
.
(1.55)
Also, from (1.51) we have
P
T
.
P1 1T1
(1.56)
2.12
From (1.55) and (1.56) we therefore arrive at
T
1 T1
(1
go
)
R
.
(1.57)
The Isothermal Region- Notice that in Figure (1.7), for 10km h 20km the slope 0 . In words, the
temperature does not change as a function of altitude. In this isothermal region the temperature will be the
constant T1 . In this case, (1.52) becomes
dP g o
dh .
P
RT1
(1.13*)
Integrating this equation gives:
P go
ln
( h h1 )
P1 RT1
(1.58)
or
go
( h h1 )
P
.
e RT1
P1
(1.59)
P
.
P1 1
(1.14*)
From (1.56) we have
Hence, from (1.14*) and (1.59), in this isothermal region we also have
go
( h h1 )
.
e RT1
1
(1.60)
EXAMPLE PROBLEM 1.1 The temperature from sea level to 30,000 ft. is found to decrease in a linear
fashion. At sea level we have (T1 , 1 ) (40o F ,2050lb / ft2 ) . At 30,000 ft. we have T2 60o F . Find the
temperature, pressure, and density at 20.000 ft.
Solution: The temperature gradient is
( 60 459 .6) ( 40 459 .6)
100
1
.0033 o R / ft . Hence,
30,000
30,000 300
the linear temperature model is: T (40 459.6) .0033h 499.6 .003h So, for h 20,000 ft , we have
T20,000 499 .6 .003 (20,000 ) 432 .9o R 26 .7o F .
2.13
T
Using (1.55), the pressure is: P20,000 P1 20,000
T1
go
R
432 .9
2050
499 .6
32.2
1718(.0033)
915 lb / ft 2 .
Finally, from (1.51): P20,000 20,000RT20,000 or 20,000 P20,000 /(RT20,000 ) 915 /(1718 432 .9) .00123 slug / ft 3 . □
A FINAL REMARK. While the author does not explicity mention it, the above equations are, in fact, the
source of the atmospheric table in Appendix A. As such, the student may wish to incorporate them into
his/her own e-table
2.14
1.6 AERODANAMIC NOMENCLATURE
2.15
Let Q V 2 / 2 denote the dynmaic pressure associated with a plane velocity V through air with a density
ρ, and let S denote the wing planform area. The aerodynamic forces acting on the plane are:
X C xQ S
Axial Force
(1.61)
Y C yQ S
Side Force
(1.62)
Z CzQ S
Normal Force
(1.63)
These equations assume that the aerodynamic forces are a linear function of Q, or a quadratic function of
V. Since the dimensions of the product Q S are[force/area]x[area] = [force] the parameters Cx, Cy, and Cz
are dimensionless. The moments acting on the plane are given by
L Cl Q S l w
Rolling Moment
(1.64)
M CmQ S c
Pitching Moment
(1.65)
N Cn Q S l w
Yawing moment
(1.66)
where lw is the wing span and c is the wing mean chord length. Clearly, the parameters Cl, Cm, and Cn are
also dimensionless.
2.16
Definition 1.6.1 In relation to Figure 1.11, define the following angles:
tan1 ( w / u)
Angle of Attack
(1.67)
sin 1 (v /V )
Sideslip Angle
(1.68)
where the magnitude of the plane velocity vector V is
V u 2 v 2 w2 .
(1.69)
Small Angle Approximations- If the attack and sideslip angles are sufficiently small ( 15 o ) then they can
~
be approximated reasonably well by
w/u
Angle of Attack small angle approximation
(1.70)
v /V
Sideslip Angle small angle approximation
(1.71)
1.7 AIRCRAFT INSTRUMENTS
1.7.2 Airspeed Indicator
For a plane flying at a constant speed V, the total pressure is the sum of the static and dynamic pressures:
1
1
P0 P Q P V 2 P V2 Pstag .
2
2
(1.72)
Notice that the total pressure is also the stagnation pressure [c.f. (1.32)]. From (1.72) we have
1
V2 P0 P Pstag P
2
(1.73)
or
V
2( P0 P)
2( Pstag P )
.
(1.74)
Definition 1.7.1 The air speed indicator is an instrument that measures the differential pressure
P0 P Pstag P and deflects an indicator hand that is proportional to the square root of this differential
pressure. Because it does not also measure the air density, the proportionality constant that is used is
2 / 0 , where 0 is the air density at standard sea level conditions.
2.17
Because 0 is used in (1.74), this equation does not measure the true air speed, VTAS V . Instead, it
measures the indicated air speed:
2( P0 P )
V IAS
0
2( Pstag P )
0
(1.15*)
.
Remark 1.1.7 The author defines the indicated air speed, V IAS ,as the instrument-indicated speed that is
affected by not only density, but also by compressibility, instrument, and location errors.
Definition 1.7.2 In the absence of all factors other than density, V IAS becomes what the author terms the
equivalent air speed. VEAS . The true air speed VTAS is defined by the relation:
1
2
0 VEAS
2
P0 P Pstag P
1
2
.
VTAS
2
(1.78)
Equation (1.78) simply recognizes that the measurement at hand is the pressure differential
P0 P Pstag P . A comparison of (1.73) and righthand equality in (1.78) makes it clear that VTAS V .
From this measurement, by using 0 , the instrument calculates VEAS . Having this, as well as an
independently caluclated value for , allows one to caluclate VTAS V via (1.78) as:
VTAS
VEAS
/ 0
VEAS
.
(1.79)
EXAMPLE PROBLEM 1.2 An aircraft altimeter, calibrated to the standard atmosphere, reads 10,000 ft.
The airpseed indicator (calibrated to eliminate both instrument and location errors) reads a speed of 120
knots. If the outside temperature is 20 o F , determine the true air speed.
Solution: [Updated 8/26/15] From Appendix A, the static pressure at an altitude of 10,000 ft in the
standard atmosphere is P 1455.6 lb / ft2 . This is, in fact, the measured static pressure. Now, from this
same Appendix A, the density at 10,000 ft, assuming the standard temperature T0 483.025o R [or
T0 483.025o 459.7o 23.3o F ] is (T0 ) .0017556 slug / ft3 . However, since we have
T 20 o 459 .7o 439 .7o R , the actual density is:
P
1455 .6
.00193 slug / ft 3 .
RT 1716 (439 .7)
Hence, / 0 .00193 / .0023769 0.812 , and so VTAS
VEAS
120
.812
133 .17 knots
□
2.18
APPENDIX Matlab code for Example 1.5.1
%PROGRAM NAME: ex1_5_1.m
%PART (a):
h = 0:.01 : 10; % Altitude array (km)
To = 288.16; %Temp (K) at sea level
L = -6.8; %Temp gradiant (K/km)
muT = To + L*h; % mean temp.
stdT = .01*muT; % temp. std. deviation
muT1 = muT - 2*stdT; %Lower error bound
muT2 = muT + 2*stdT; %Upper error bound
figure(1)
plot(h,muT,'k')
hold on
plot(h,muT1,'k--')
plot(h,muT2,'k--')
xlabel('Altitude (km)')
ylabel('Temp. (K) )')
title('Mean Temperature and Standard Errors as a Function of Altitude')
grid
pause
%PART (b)
m = length(h);
T1 = muT(m) -3*stdT(m);
T2 = muT(m) + 3*stdT(m);
dT = (T2 - T1)/100;
Tvals = T1 : dT : T2;
f = normpdf(Tvals,muT(m),stdT(m));
figure(2)
plot(Tvals, f)
xlabel('Temperature (K)')
title('Distribution of T(h=10km)')
grid
pause
% PART (c):
Tdata = normrnd(muT(m),stdT(m),1,10e4);
figure(3)
hist(Tdata,25)
xlabel('Temperature (K)')
title('Histogram of 10^4 measurements of T(h=10km)')
grid