here
advertisement

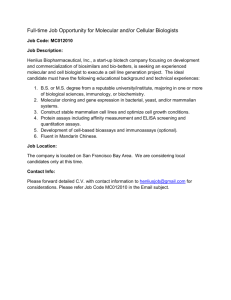
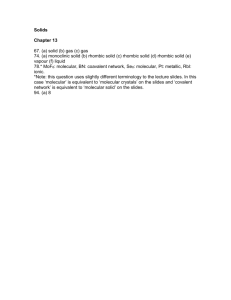
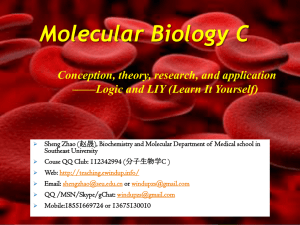
Top Master Project december 2009 Feringa group Molecular Nanotechnology and Smart Materials Catalytic Molecular Motors “Controlling movement at the nanoscale” Introduction The design, synthesis, assembly and control of functions of dynamic complex molecular systems arguably is one of the main frontiers in molecular nanotechnology. Based on extensive research in molecular biology during the past decades we realize now that the living cell can be viewed as a miniature factory, featuring a large collection of protein machinery that can perform complex mechanical tasks, for instance intracellular transport, cell translocation and cell division, proton and ion pumping and ATP synthesis [1]. A particular important class of these protein systems can be classified as molecular motors e.g. catalytic systems that consume chemical energy to produce a directional motion [2]. Much like in macroscopic machines we all know from modern daily life, these nano-scale motors perform work and fulfill task and are crucial components of the bio-molecular assemblies, as they generate the forces and motion required for many biological processes to function properly. Therefore, artificial nano-scale devices and molecular motors which mimic dynamic and mechanical functions of these complex biological systems, and which are much simpler in design and tolerate a broader range of operating conditions, are highly desirable. In contrast to the top-down approach in miniaturization of existing devices we focus on the building of entirely synthetic systems that feature motor and switch functions and which rely on assembly processes using small molecular building blocks in a so called bottom-up approach . This formidable challenge was clearly stated as follows: “in the field of nanotechnology the design of molecular motors has always been standing out” [3]. Figure 1 a) Unidirectional light-driven molecular motor; b) ATP-ase protein rotary motor In recent years a number of synthetic machines and motors have been developed allowing controlled movement at the nanoscale which includes both translational and rotary motion [49]. Two major classes of compounds have been successfully explored viz. i) mechanical interlocked systems like rotaxanes and catenanes (Stoddart, Sauvage, Balzani, Leigh) and ii) ratchets, overcrowded alkenes and biaryls (Kelly, Feringa and recently Aida). Furthermore, following pioneering work by Whitesides,[10] catalytic propulsion of (bi)metallic objects [11] and molecular systems [12] has recently also been demonstrated. The mechanical movement is driven by chemical, redox or light energy in these early systems. The research project outlined in the following part will build on our recent discoveries the first molecularly defined autonomous translational motor powered by a chemical fuel [12] (Figure 1). The goal of the research proposed here is to address one of the most challenging aspects of molecular motors namely to develop translational molecular motors that are driven by a catalytic conversion of a “chemical fuel”. This means the design of catalytic motors by coupling catalytic conversions to the dynamic functions of molecules i.e. translation. This project will build on new catalytic conversions but in the systems to be designed the catalytic transformations will be used as propulsion mechanism to achieve controlled motion. Chemical driven translational and rotary motion. In the macroscopic world, controlled locomotion is achieved by machines that are powered by electricity or chemical fuels and directionality is controlled by inertia, friction and gravity. At the micro- and nano-scale the extent of control of motion that can be achieved by macroscopic phenomena, in particular gravity, decreases with size. Instead microscopic forces such as viscosity, concentration gradients and Brownian motion, become dominant at increasingly smaller dimensions. Achieving controlled movement in this domain is extremely difficult and the field is still in its infancy in the use of artificial motors as discussed above. In contrast, bacteria and biological motors are able to propel themselves fully autonomously by harnessing the chemical energy and taking advantage of Brownian motion using biased ratchet mechanisms to achieve directional motion and exert force. We have very recently demonstrated that autonomous movement can be achieved using glucose as a fuel (Figure 2). Towards this end a biohybrid system was constructed comprising a carbon nanotube fucntionalised with glucose oxidase and catalase enzymes. The enzymes work in concert to decompose glucose and generate oxygen bubbles that propel the nanotube. Figure 2. A glucose powered autonomous moving carbon nanotube. In the drive for chemically fuelled autonomously moving objects, the pioneering work of Whitesides [10] and more recently Sen, Ozin, Manners and co-workers [11], although based on non-molecular systems, provide important insight. In their systems, a combination of a metal capable of catalyzing the decomposition of hydrogen peroxide (the chemical fuel) to water and oxygen and an inert metal allow for the generation of oxygen bubbles, local oxygen concentration gradients and/or differences in surface tension, which provides the stimulus to move a millimetre or micrometer sized metallic object with limited directional control. The boundary between the macroscopically and microscopically important forces appears, based on these studies, to lie in the 1-10 micron range. In our group, we demonstrated recently that synthetic molecular systems are capable of achieving chemically fuelled autonomous movement [12] (Figure 3). In this example micro-particles were functionalised through spacers with synthetic catalysts that can effect H2O2 disproportionation to produce O2 at sufficiently high concentrations to propel the particle. Despite the fact that control over the directionality of the translational movement is limited thus far, this molecular based system demonstrates clearly that the conversion of chemical energy to kinetic energy and thereby movement of a micro-object through the concerted action of molecular-scale motors, is feasible. These highly promising preliminary studies will form the basis for the program on chemical driven translational and rotational motion. The following major challenges will be addressed in this project as outlined below. i) From the micro- to the nano- scale Thus far the chemically fuelled autonomous motion as illustrated in Figure 3 has been demonstrated with micro-objects and the movement induced by O2 evolution is related to the physical effect of bubble formation. Moving to the nano-scale, for particles < 1 micrometer in size, the study of the motion is hampered by the inherent Brownian motion. Nano-particles of approx. 100 nm in size will be prepared and functionalized with a catalytic motor and a luminescent group (Figure 3). The catalyst is a dinuclear manganese complex which acts as a functional mimic of the catalase enzymes and is capable of diproportionating H2O2 with high turnover rate. A derivatised [RuII(2,2’-bipyridyl)3]2+ complex will be anchored as the luminescent probe unit. The luminescent unit must fulfill several criteria i) to be robust enough to withstand the highly oxidizing conditions, which would rapidly degrade common fluorescent labels, ii) the two transition metal complexes should not compromise each other’s functions. With all functionalities present, wide field fluorescent techniques and a special designed micro-cavity to follow the diffusion of particles and chemically fuelled autonomous motion, will be used. The hydrophobicity of the particles can be modified through co-assembly of alkyl chains while the degree of Brownian motion will be controlled via the use of a media with a range of viscosities. With these experiments we expect to be able for the first time to demonstrate autonomous motor driven motion out of the Brownian regime. Once the proof of concept has been established, the parameters which govern these motions will be explored by reducing the size of the particles further to the sub 100 nm level. ii) Directional translational movement Tho approach envisioned involves nanosize zeolite hollow cylinders to achieve control over the directionality of the autonomous movement. Figure 3. a) Autonomous moving micro-particles powered by hydrogen peroxide as chemical fuel and with luminophore attached to report movement b) catalyst luminophore combination on modified silica microparticles.i Secondly, we will design motor- functionalized particles that are asymmetric or strongly anisotropic in shape. For instance, we intend to decorate the interior of silica-microcapsules with the dinuclear manganese complexes and the disproportionation of H2O2 and O2 generation exclusively inside the capsule is expected to generate a highly directional expulsion and movement. As an alternative we intend to grow nanotubes on a surface using reported procedures and either prior or after detachment, the ends of the tube can be functionalized selectively with catalysts generating a highly anisotropic object with non-random positioning of the chemical motor functions. (For an autonomously propelled notube, see above). The first end-capped nanotubes based on zeolite hollow tubular spheres have recently been made in our group. Of course these examples of how to approach the problem of directionality through assemblies with spatially positioned motors or control of shape of the objects are certainly not exhaustive and numerous alternatives are available for further studies. This project will be performed in close cooperation with (and daily guidance by) Dr. Jack Beierle (postdoc) (zeolite modification, motor synthesis) and the master candidate will focus on the physical aspects e.g. fluorescent and propulsion studies, characterization, spectroscopy and motion on surfaces. 1. L. Stryer, Biochemistry, 4th edn., W. H. Freeman, New York, 1995. 2. Molecular Motors (Ed.: M. Schliwa), Wiley-VCH, Weinheim, 2003. 3. G. M. Whitesides, Sci. Am. 2001, 285, 78-83. 4. W. R. Browne, B. L. Feringa, Nat. Nanotechnol. 2006, 1, 25-35. 5. E. R. Kay, D. A. Leigh, F. Zerbetto, Angew. Chem., Int. Ed. 2007, 46, 72-191. 6. Molecular Devices and Machines: A Journey into the Nanoworld (Eds.: V. Balzani, A. Credi, M. Venturi), Wiley-VCH, Weinheim, 2003. 7. Molecular Machines and Motors (Ed.: J.-P. Sauvage), Struct. Bond. 2001, 99. 8. a) V. Balzani, A. Credi, F. M. Raymo, J. F. Stoddart, Angew. Chem., Int. Ed. 2000, 39, 3349-3391; b) J. D. Badjić, V. Balzani, A. Credi, S. Silvi, J. F. Stoddart, Science 2004, 303, 1845-1849; c) T. J. Huang, B. Brough, C.-M. Ho, Y. Liu, A. H. Flood, P. Bonvallet, H.-R. Tseng, M. Baller, S. Magonov, J. F. Stoddart, Appl. Phys. Lett. 2004, 85, 5391-5393; d) Y. Liu, A. H. Flood, P. A. Bonvallet, S. A. Vignon, B. H. Northrop, H.-R. Tseng, J. O. Jeppesen, T. J. Huang, B. Brough, M. Baller, S. Magonov, S. D. Solares, W. A. Goddard, C.-M. Ho, J. F. Stoddart, J. Am. Chem. Soc. 2005, 127, 9745-9759. 9. a) M. C. Jiménez, C. Dietrich-Buchecker, J.-P. Sauvage, Angew. Chem., Int. Ed. 2000, 39, 32843287; b) J.-P. Collin, C. Dietrich-Buchecker, P. Gaviña, M. C. Jimenez-Molero, J.-P. Sauvage, Acc. Chem. Res. 2001, 34, 477-487 10. R. F. Ismagilov, A. Schwartz, N. Bowden, G. M. Whitesides, Angew. Chem., Int. Ed. 2002, 41, 652-654. 11. a) T. R. Kline, W. F. Paxton, T. E. Mallouk, A. Sen, Angew. Chem., Int. Ed. 2005, 44, 744-746; b) J. M. Catchmark, S. Subramanian, A. Sen, Small 2005, 1, 202-206; c) S. Fornier-Bidoz, A. C. Arsenault, I. Manners and G. A. Ozin, Chem. Commun. 2005, 441-443; d) Y. Wang, R. M. Hernandez, D. J. Bartlett, J. M. Bingham, T. R. Kline, A. Sen, T. E. Mallouk, Langmuir 2006, 22, 10451-10456. 12. J. Vicario, R. Eelkema, W. R. Browne, A. Meetsma, R. M. La Crois, B. L. Feringa, Chem. Commun. 2005, 3936-3938. 13. N. Koumura, R. W. J. Zijlstra, R. A. van Delden, N. Harada, B. L. Feringa, Nature 1999, 401, 152155. 14. S. P. Fletcher, F. Dumur, M. M. Pollard, B. L. Feringa, Science 2005, 310, 80-82. 15. T. R. Kelly, H. de Silva, R. A. Silva, Nature 1999, 401, 150-152. 16. D. A. Leigh, J. K. Y. Wong, F. Dehez, F. Zerbetto, Nature 2003, 424, 174-179 17. S. P. Fletcher, F. Dumur, M. M. Pollard, B. L. Feringa, Science 2005, 310, 80-82. Further information: Prof. dr. Ben L. Feringa. Room 15.205 E-mail: b.l.feringa@rug.nl, tel 3634235