Hard Potato Routing Algorithm: An Experimental Study using
advertisement

Page 1 of 10
Hard Potato Routing Algorithm: Experimental
Study using Mesh Simulation in Java
Suyog Deshpande
Student ID: 901-01-0484
University of Maryland
Baltimore County
Baltimore, Maryland
suyog1@umbc.edu
Abstract
We present an experimental verification of the
Hard Potato Routing algorithm for a 15 x 15
mesh. The authors of “Hard Potato Routing”
[1] claim to provide a novel approach to
routing of packets in n x n mesh network. They
make use of some new techniques to propose
their algorithm. However, most of their work is
theoretical, and rests on probability. We verify
their algorithm and see if the theoretical
analysis does hold true, and also show whether
the probabilities mentioned by authors apply in
a real 15x15 mesh network that we simulate.
1.0 Introduction
“Hard Potato Routing” [1] paper is taken from
the proceedings of the thirty-second annual
ACM symposium on Theory of computing May
21 - 23, 2000, Portland, OR USA. The authors
of the paper present the first hot-potato routing
algorithm for the n x n mesh whose running
time on any "hard" (i.e. Ω(n))"many-to-one"
batch routing problem which is, with high
probability, within a polylogarithmic factor of
optimal. For any instance I of a batch routing
problem, there exists a well-known lower bound
LBI based on maxim path length and maximum
congestion. If LBI is Ω (n), the hard-potato
routing algorithm solves I with high probability
in time O (LBILog3n).
Jay Patel
Student ID: xxx-xx-0859
University of Maryland
Baltimore County
Baltimore, Maryland
jay2@umbc.edu
The Section 1 will introduce the paper “Hard
Potato Routing” [1] and give the related work.
Section 2 will deal with the preliminaries of
setting up the simulation and the assumptions
made. In Section 3 we give high-level
psuedocode for the algorithm. We describe the
results obtained experimentally in Section 4
with graphs and Section 5 has the necessary
calculations. We conclude in Section 6 with
open problems in the simulation.
1.1 Background
A hot-potato (or deflection) routing algorithm is
a packet routing algorithm in which nodes have
no buffers to store packets in transit: any packet
that arrives at a node other than its destination
must immediately be forwarded to another node.
The network we consider here is the twodimensional n × n mesh, one of the simplest
networks for multiprocessor architectures. The
nodes in the network are synchronized, namely,
time is discrete and in each time step a node
receives packets from its adjacent nodes, then
takes routing decisions, and then forwards the
packets to the adjacent nodes according to the
routing decisions. At each time step a node is
allowed to send at most one packet per link.
Page 2 of 10
become excited, increasing its priority over nonexcited packets. An excited packet attempts to
converge on its target by choosing a logarithmic
number of random intermediate destinations
(see Figures 2 and 4) in a sequence of squares
of decreasing size. As we will show in the
simulation, a packet during its multi-bend path
has a good chance not to be interrupted by other
high-priority packets, and therefore, to
successfully reach its destination.
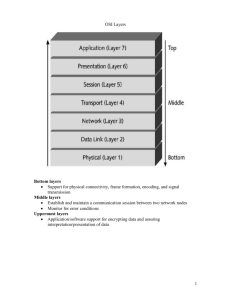
Figure1. Packets with destinations in a region,
Mansour and Patt-Shamir [2] have noted that
there is a trivial lower bound for problems of
this kind. If a packet's source and destination are
separated by distance d, then no routing
algorithm can deliver that packet in fewer than
d steps. The maximum such distance a packet
must traverse in a routing problem I, is called
the distance lower bound, denoted DI. Consider
now the case where s packets have their
destinations inside some region of the network
and these packets originate from outside the
region (see Figure 1). All these packets must
enter the region. If the region has z incoming
links in its perimeter, then at each time step
at most z packets can enter the region, and thus,
no routing algorithm can deliver those s packets
in fewer than s/z steps. The maximum value of
this ratio, taken over all the regions in the
network, for a problem instance I yields the
bandwidth lower bound, denoted WI. The lower
bound for I, which we denote by LBI is just
Ω(DI + WI).
The Hard Potato Routing algorithm is
distributed: each node makes routing decisions
based on its local state, independently of the
other nodes. Moreover, nodes know nothing
about the initial distribution of destinations
(including the values of DI, WI, and LBI) .
At the heart of this algorithm is a new technique
based on multi-bend paths, a departure from the
paths using a constant number of bends used in
most other hot-potato algorithms. Each time a
packet is deflected (unable to advance toward its
destination), it may, with a certain probability,
1.2 Related Work
Hot potato routing was first proposed by Baran
[3]. For mesh-like networks, there are many hotpotato algorithms tuned for the batch
permutation and random destination routing
problems [4; 5]. In the more general setting of
arbitrary many-to-one batch routing problems,
Ben-Dor et al. [6] provide a simple algorithm
for the 2-dimensional n x n mesh with O(n k)
steps, where k is the total number of packets
to be routed. Similarly, Ben-Aroya et al. [4]
give an algorithm that finishes in DI + 2(k - 1)
steps in the two-dimensional mesh.
2. Preliminaries
We chose to do the programming of the
simulator in Java due to its object oriented
nature and robustness of the programming
language. In the paper “Hard Potato Routing”[1]
the authors have only given a theoretical
description of the algorithm. To simulate it we
first had to understand the data structures like
links and nodes involved in it. Proper designing
is important to correct implementation of code.
So we list the main points to keep in mind while
creating the program code:
A two dimensional (NxN) mesh
nodes are synchronized
time consideration is discrete, i.e.: at
one point there is only one transition
from each node.
Page 3 of 10
In each step a node receives a packets
from adjacent nodes and based on the
packets makes the Routing decisions,
passes the packet depending on the
decision, and passes only packet per
link.
Each node ( except at the edge of the
mesh) is connected to adjacent nodes by
bi-directional links.
The following are the various structure we will
need and their properties:
2.1 Mesh Structure:
We are given an n x n mesh of nodes. We
denote a node v with its coordinates ( x, y ),0= <
x, y< n, where x is a column and y a row. The
lower-left comer of the mesh is the node(0, 0)
and the upper-right comer (n - 1, n - 1). Each
node(except at the edge of the mesh) is
connected to its four adjacent nodes by bidirectional links, denoted up, down, left and
right. We denote the distance between nodes v =
(x, y) and v' =( x ' , y') as dist(v, v') and is the
quantity dist(v, v’) = |x – x’| + |y – y’|
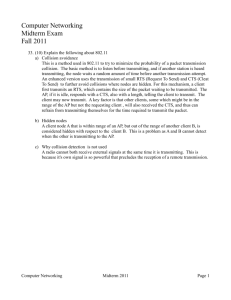
of v is the z × z square whose lower leftmost
node is v ‘ = ( x + z -1, y + z -1), as shown in
Figure 2. The horizontal band-z of
v is the rectangle:
[(x + 2z - 1,y + z - 1 ) , ( n - 1 , y + 2 z - 1)].
The vertical band-z of v is the rectangle:
[ ( x + z - 1, y + 2z -1), ( x + 2z - 1 , n - 1)].
For the simulation purposes we will consider a
mesh structure on 15 x 15.
2.2 Packet structure:
Has two parts, namely the
MESSAGE and the HEADER part
of the message.
The HEADER part can contain an
integer number. The header defines
the state of the packet as to be
NORMAL = 0, EXCITED = 1 or
RUNNING = 2.
Packet Properties:
A packet in normal state will try to
take the preferred link to the
destination the packet will always
chose the shortest route possible to
the destination.
If the normal packet is not able to
take the preferred link , then it makes
a DEFLECTION. Once deflected,
the packet reaches another node and
changes its state to EXCITED state.
Figure 2: The squares and bands of a node
Take a node v = (x, y) and a number z = 2 k,
where k =0 , . . . , lg(n) - 1. Consider the submesh that is up and right from v. The square-z
Figure 3: a deflected packet becomes excited
In the EXCITED state, the packet
becomes with a little higher priority,
and goes on a preferred link. If the
EXCITED packet reaches the next
Page 4 of 10
preferred link, then it immediately
changes its state to RUNNING state.
From then on the RUNNING state
will have the highest priority and
will reach the destination using all
the preferred links. All the other
packets with lesser priority will not
get that path.
N
N
N
N
N
Figure 5: Node Structure
Figure 4: A successful running path
However, if the EXCITED path for
some reason say collision or
deflection is not able to get the
preferred link, the it changes its state
back to NORMAL state
and
proceeds like a normal packet.
Also, if the RUNNING packet too
for some reason is not able to get the
preferred link, then it too changes its
state back to NORMAL state and
proceeds as a normal packet only.
2.3 Node Structure:
Each node (except at edge of node) is
connected to adjacent node by bidirectional links.
The UP, DOWN, LEFT and RIGHT
links would be followed by the packet to
go to the next node such that it comes
closer to the destination node.
Figure 3 and 4 shows examples of packet
movement.
2.4 Assumptions Made
Following assumptions are made to simplify the
implementation of the algorithm:
When two packets having the same state
try to get the same preferred link then
the simulated packet will not get the
preferred link.
The mesh structure will be 15x15. We
needed to decide on the size of the mesh
and we selected 15 as it is big enough to
simulate a real network mesh yet small
enough to keep the experimental
complexity with in our limits of time and
practical implementation.
Only one packet is simulated at a time
and some other nodes will be blocked to
simulate actual conditions when many
packets will be moving in the mesh.
Links have uniform cost of 1.
Nodes are separated by uniform distance
Page 5 of 10
3. Algorithm
In the paper “Hard Potato Routing” [1], the
authors have given a theoretical description of
the algorithm. This is a greedy algorithm as the
packet will decide on the preferred link to be
followed considering only the surrounding
nodes. Thus it will be a choice that looks best at
that time. This may not necessarily help the
packet reach the node .
We define sourceNode as the source node ,
currentNode as the node at which the packet is
present for the current time event and destNode
as the destination node. state is the current state
of
the
packet
(0=normal,
1=excited,
2=running).Link is either up, down, left or right
depending on the preferred link obtained for a
node.
currentNode = sourceNode
Algorithm:
do till currentNode != destNode
{
if state is normal
obtain link for the shortest path to
destination
if state is excited or running
obtain preferred link to destination
if link obtained is taken by other packet &&
state of other packet is higher
then
change state of packet and redo
Algorithm
else
update currentNode and redo Algorithm
}
The above code just tries to show the very basic
logic being implemented in the simulator. The
algorithm will terminate when the currentNode
will become equal to destNode. Actual
implementation[7] is more complex then shown
here.
The running time of the algorithm will depend
on the number of time events needed by the
packet to reach destination. The space storage
will include all the nodes along with up to four
links per node.
4. Experimental Results
We will now give the results that we have
obtained. In the next Section 5 of calculation we
compare them with the theoretical proofs given
in the paper “Hard Potato Routing”[1].
4.1 Experimental Setup
Using java gave us the advantage of platform
independence. We could thus compile our code
on any machine and then run the simulations on
other machine depending on which was free.
Also visual simulation in java is easier to do
than in any other language. For the actual
coding part we used Microsoft Visual J++ 6.0.
4.1 Time and Space complexity.
We show the time and space complexity of this
routing algorithm here. We tested the time
complexity for a true many to one batch routing
instance. Each instance of
the test was
calculated for 3 times to give us a average
values. The instances which we took were
sending 6,10,20,40,50,70,80,90,100,117 and
150 random nodes heading towards a single
destination. The graphs for the time complexity
and the space complexity are as shown below:
Page 6 of 10
Time complexity:
Space Complexity:
Space analysis
300
31300
250
31200
space in Bytes
Time taken in steps
Time Analysis
200
150
100
31100
31000
30900
30800
30700
50
30600
0
30500
6
10 20 40 50 70 80 90 100 117 150
Number of packets
Figure 6: Time Complexity Graph
6
20
50
80
100
150
Num ber of packets
Figure 7: Space Complexity Graph
The time taken was measured in number of
steps taken to reach the destination. One of the
assumptions here is that time is discrete and at
each time event, packet can go only one step.
Also, we assumed that this time constant be one
second. Thus 300 steps means 300 seconds. The
importance of steps is explained further ahead.
As we see in the space complexity diagram, the
space required by the algorithm also goes on
increasing steadily. Though the graph does not
show a appreciable change in values of the
space, this is because of the number of packets
tested. The graph will show this behavior even
for greater number of nodes tested.
Also according to lemma 5.16, for any batch
problem instance, with high probability (1-1/n)
all packets reach their destination nodes in at
most O(mln3n) steps. The calculation by taking
m and n as 15 gives us 297.89 steps.
4.3 Probabilistic calculations
verifications- our interest.
From the time analysis graph above we noticed
that the observation hold true. While the 6
packets finished in 32 steps, 117 packets took
273 steps to reach their destination. 150 packets
took 291 steps to reach the destination. All these
steps were well within the bounds that the
authors mention above. Thus it is proved that
O(mln3n) steps bound does hold true.
and
The authors claim in lemma 5.16 that with a
high probability of (1- 1/n) the packets will
reach their destination. In our experimental
results we tried to verify the same. We noticed
some discrepancy in the high probability which
the authors define and the results we obtained.
The authors claim of (1-1/n) for mesh size of
15x15 gives us a success rate of 93% (
substitute n=15) in the equation. However, we
did not notice these figures.
Page 7 of 10
(1-1/n) probability verification
100
% success
80
60
40
20
0
6
10
20
40
50
70
80
90
100 117 150
no of packets tested
Figure 8: Probability Verification Graph
We
tested
the
algorithm
for
6,10,20,40,50,70,80,90,100,117,150 packets in a
many to on batch system, wherein all the
packets were headed to the same destination.
For each run of the algorithm, we simulated the
case 3 times to get an average. The probability
plot for this experiment is as shown above.
Interesting Results:
We noticed some interesting results when we
performed this experiment. Though the authors
give us a success rate of 93%, we didn’t see it in
our tests. We got success rate of 100% for 6
packets, but it was well below the claimed
success rate for 117 packets with 68% and 150
packets with 56%. However we do believe that
for a mesh of much larger sizes, the success rate
will improve. The improvement will be seen as
the packets further away and ‘right’ of the
destination node have a much greater chance of
making it to the destination. This is explained
in detail in the next section as a special case for
117 nodes.
4.4 Special case with 117 packets.
Here we tried to find out that given a mesh with
some packets heading towards a destination,
how many would actually reach there. To do
this, we implemented author’s idea. That is we
launched adversary packets in the path of the
normal packets to deflect them. This was done
in the simulator by making the nodes occupied,
and setting their priorities to normal, excited or
running in advance. Also, we make a
assumption here that for every packet that we
chose to run, the adversaries were already there
to stop the packets at that time instant. Also, to
simplify our analysis, we chose as many as 117
arbitrary nodes as adversary packets, situated
across the mesh evenly. Also, to simplify things
further, we further assumed that our test packets
would be one of the adversary packets only;
hence thereby avoiding the complexity of the
analysis.
A few interesting results were seen while
simulating the algorithm.
The packets in the middle portion of the
15 x 15 mesh had higher probability of
making it to the destination successfully.
Also, packets in the first vertical band
almost never made it to the destination,
while those in horizontal bands made it
successfully.
The probability of packets far away from
the destination is more than the ones
near them.
As seen from the graph, we see that as
the destination (N1103) gets further
away from the nodes belonging to
N0010 or N0100 lines, the probability of
those packets making it to destination
was also less.
Out of the 117 packets tested, 79
successfully made it to the destination.
It was interesting to note that even
though packet might be nearer to
destination did not mean that it would
reach the destination quicker. This was
noticed for all the cases we tested. That
is this behavior was observed
specifically
for
40,50,70,80,90,100,117,150
packets
setup
Page 8 of 10
density of packets reaching destination
79/117 reach destination.
their journey successfully. However, using hard
potato routing, 10 out of 11 packets reached
their destination successfully. Here too we see
that hard-potato routing algorithm performs
better than a naïve algorithm
2.5
2
1.5
Series1
1
For simplicity sake we leave out the rest of the
calculations we performed. We noticed that the
hard potato routing algorithm does perform
better than a naïve shortest path algorithm.
0.5
5.0 Theoretical Calculations
n1308
n1110
n0907
n0711
n0514
n0401
0
n0000
time taken in steps
3
points ( nodes) dest:1301
Figure 8 Graph showing Density of Packets Reaching Destination
4.5 Comparing with naïve algorithm.
Here we chose to demonstrate how this
algorithm works better than a normal shortest
path algorithm. We chose to compare this
algorithm with shortest path algorithm for
simplicity sake. In a shortest path algorithm,
each packet tries to get to destination in the
shortest possible way. If there is a collision
between 2 packets, then one of the packets is
lost.
We conducted 2 sets of experiments. In the first
experiment we chose to target 6 packets to a
single destination. Using the naïve algorithm,
we noticed that we lost 3 out of 6 packets due to
collisions. However, using the hard potato
routing algorithm we found that all 6 packets
reached their destination successfully. The hard
potato algorithm gives us a rise of 50%
efficiency in this case.
In the second experiment, we chose to have
multiple destinations with multiple sources. This
time we had 2 destinations, with 6 packets
headed to first destination and 5 packets headed
to second destination. Using naïve algorithm,
we found that out of 11 packets, only 7 made
There are several lemmas which have been
given by the authors of the papers. We find
values for a few of the lemmas given and
present some insights into same.
5.1 lemma 5.2 calculation of ‘m’
The value of ‘m’ as given by the authors is as
shown below:
m >= dest(S)/n
Where dest(S) is maximum number of the
packets that can be routed (225 in our case) and
n is 15. Hence m is
m = 225/15 = 15.
So there can be at the most maximum m
destination packets in the submesh. The
parameter ‘m’ is defined as the maximum
number so that no k x k square has more than
mk destination packets. In this case it is 15.
5.2 lemma 5.14: If a packet ‘phi’ is
deflected x times, then it will reach its
destination in at-most
2x + 2n – 2 steps.
This was verified by doing the results. A packet
deflected 2 times took less than 32 steps to
reach the destination. In fact all the packets
make it within this result only. Similarly a
packet deflected 4 times took less than 36 steps
Page 9 of 10
to reach the destination. This was observed for
the cases tested.
5.3 Constants used in the calculations
1. c= 24e = 24*2.72 = 65.28
2. c’ = 3*24clg2 e = 4700
3. t0 = c’mln3n + 2n = 1410030
4. t1 = 3c’mln3n = 4230000.
m and n values remain same as 15. This is clear
from lemma 5.2 proved above.
These constants were used to derive different
formulas presented in the original paper. Using
these values, the authors come to a final
probability of ( 1-1/n) and the bounds O(mln3n)
steps.
6.0 Summary and Future scope of the
results.
We successfully show an implementation of a
hard-potato routing algorithm experimentally
and verify the same with author’s theoretical
calculations. Though there is a disparity of
results when considering large number of
packets, given the algorithm nature, we are sure
that that the efficiency of the algorithm
increases for mesh of large size. As noticed,
mesh with very large size might also have a
success rate of 100%. Also this algorithm shows
significant improvement over a naïve shortest
path algorithm we compared with. The gains of
more than 50% in efficiency, leads us to believe
that the lower bounds that the authors
mentioned can be attained for a large size mesh.
5.4 Scope of the results.
It is to be noted that the probability of getting a
success of 93% is when we consider a mesh of
15 x 15 network. It is immediately apparent that
for larger sizes of mesh, this probability of
success might increase. In fact for a very large
mesh networks, the success rate might be as
good as nearer to 100%. However, there might
be some disparity between this result and actual
result by experimental results. As the density
graph shows, we showed that nodes further and
right from destination had great chance of
making it to destination. Hence in a very large
network, this also means that more number of
packets will make it to destination, thereby
increasing the success rate.
Also, we perform the experimental results for a
relatively smaller size of network than the
authors aim to consider. We chose a small
network because of the simplicity. .
Future work on the project may include
verifying the algorithm on a very large n x n
mesh. Also, it remains to be seen if this
algorithm works as efficiently on a real network
without unit distances between nodes and equal
costs of the links. The authors themselves pose
question on the validity of algorithm over
networks of dissimilar topological sizes and
very large size networks like internet. We
successfully show the algorithm on a 15x15
network and further work could include
modification of the simulator to test the
algorithm on dissimilar networks and verify if
the algorithm holds.
Page 10 of 10
References
[1] C Busch, M Herlihy and R Wattenhofer.
Hard Potato Routing. In the proceedings of the
thirty-second annual ACM symposium on
Theory of computing , pages 278-285, May 21 23, 2000, Portland, OR USA.
[2] Y. Mansour and B. Patt-Shamir. Many to
one packet routing on grids. In the proceedings
of the twenty-seventh annual ACM symposium
on Theory of computing. Pages 258-267
[3] P. Baran. On distributed communications
networks.
IEEE
Transactions
on
communications. Pages 1-9,1964
[4] C Busch, M Herlihy and R Wattenhofer.
Randomized greedy hot-potato routing. In
proceedings of the eleventh annual ACM-SIAM
Symposium on Discrete Algorithms. Pages 458466, Jan. 2000
[5] U. Feige and P. Raghavan. Exact analysis of
hot-potato routing. In IEEE, editor, Proceedings
of the 33rd Annual Symposium on Foundations
of Computer Science. Pages 553-562
[6] A. Ben-Dor, S. Halevi, and A.Schuster.
Potential function analysis of greedy hot-potato
routing. Theory of Computing systems. Pages
31(1):41-61
[7] S. Deshpande and J. Patel. Source code of
Hard Potato Routing Simulation. Available on
the web at http://userpages.umbc.edu/~suyog1