2. distributed rainfall-runoff modeling
advertisement

PROBABILISTIC FLOOD FORECASTING
USING A DISTRIBUTED RAINFALL-RUNOFF MODEL
PAUL JAMES SMITH
2005
Acknowledgements
ACKNOWLEDGEMENTS
This thesis has been made possible through the help of a number of people who I would
like to thank.
It is difficult to overstate my gratitude to my research supervisor, Professor Toshiharu
Kojiri, who has continually provided encouragement, sound advice, and good company,
and who throughout my thesis-writing period, seemed to be constantly thinking several
steps ahead of me. Without his assistance and openness in inviting me to Japan and in
providing a comfortable research environment, my work with Kyoto University would
not have been possible.
I am grateful to the members of the Water Resources Research Center, Disaster
Prevention Research Center, Kyoto University for their support with my research.
Special thanks to Professor Shuichi Ikebuchi and Professor Kunio Tomosugi who
provided encouragement throughout the research period and to Dr. Toshio Hamaguchi
who thoroughly read the first draft of this thesis and offered many valuable suggestions.
I am thankful for the generous time and invaluable guidance regarding nowcasting of
rainfall patterns provided by Professor Eiichi Nakakita. Thanks is extended to Mr.
Katsuyoshi Sekii who made an excellent research partner and was of great assistance in
helping prepare this thesis.
Sincere thanks is extended to Tomoya Kawaguchi and staff of the Environmental
Engineering Department, Engineering Division, Nihon Suido Consultants Co. Ltd., and
to Yoji Sakamoto of Mitsui Consultants Co. Ltd., for their assistance regarding rainfallrunoff modeling, and to Yoshiyuki Zushi of the Foundation of River and Basin
Integrated Communications, Japan, and to the staff of the Kiso River Upstream River
Construction Management Division, Chubu Regional Bureau, Ministry of Land,
Infrastructure and Transport, Japan, for providing a range of useful hydrological data.
I am indebted to Professor Graeme Dandy, Mr. Trevor Daniell, and Dr. David Walker, of
the University of Adelaide’s Department of Civil and Environmental Engineering, for
their help in suggesting Professor Kojiri and Kyoto University for my graduate studies,
and for the four years of excellent preparation they gave me during my time as an
undergraduate student in their care.
i
Acknowledgements
I would also like to thank my fellow students at the Water Resources Research Center,
DPRI, Kyoto University, for the invaluable conversations we’ve shared regarding a
wide range of research and non-research related topics, for their support over the years
in helping me to make the most of my time in Japan, and for their friendship.
Finally, I would like to deeply thank my parents for all their love, encouragement and
understanding during my long stay abroad.
ii
Contents
CONTENTS
ACKNOWLEDGEMENTS .............................................................................................. i
CONTENTS .................................................................................................................... iii
LIST OF FIGURES ......................................................................................................... vi
LIST OF TABLES ........................................................................................................... ix
1. INTRODUCTION ...................................................................................................... 1
2. DISTRIBUTED RAINFALL-RUNOFF MODELING .............................................. 3
2.1. Rainfall-runoff modeling strategies .................................................................... 3
2.2. Hydro-BEAM ..................................................................................................... 6
2.3. Hydro-BEAM structure ...................................................................................... 7
2.3.1. Mesh cell model .......................................................................................... 7
2.3.2. Watershed model ....................................................................................... 10
2.4. Hydro-BEAM flow routing theory and equations ............................................ 12
2.4.1. Finite difference approximation of the kinematic wave equation ............. 13
2.4.2. Linear approximation method ................................................................... 14
2.4.3. Surface flow in mountain regions .............................................................. 15
2.4.4. Surface flow in city and water regions ...................................................... 16
2.4.5. Channel flow ............................................................................................. 17
2.5. Target watershed ............................................................................................... 17
2.5.1. Model calibration ....................................................................................... 20
2.6. Conclusions ...................................................................................................... 24
3. PROBABILISTIC DISTRIBUTED RAINFALL FORECASTING ........................ 25
3.1. Study location and rainfall data ........................................................................ 25
3.2. Modeling translation and rotation of rainfall fields .......................................... 26
3.2.1. Identification of translation vector parameters from rainfall patterns ....... 27
3.2.2. Extrapolation of rainfall patterns ............................................................... 27
3.3. Time series analysis of observed translation vector parameters ....................... 29
3.3.1. ARMA time series analysis ....................................................................... 29
3.3.2. ARMA model identification ...................................................................... 30
3.3.3. Generation of vector parameters................................................................ 38
3.4. Time series analysis of growth-decay of rainfall fields .................................... 38
3.5. Statistical analysis of growth-decay of rainfall fields ...................................... 39
3.5.1. Statistical analysis...................................................................................... 41
3.5.2. Estimating spatial correlation .................................................................... 46
3.5.3. Conditional generation of spatially-correlated noise ................................. 48
iii
Contents
3.6. Radar observation error .................................................................................... 49
3.7. Monte Carlo simulation .................................................................................... 49
3.8. Application ....................................................................................................... 52
3.9. Conclusion ........................................................................................................ 58
4. ADAPTIVE UPDATING OF A DISTRIBUTED RAINFALL-RUNOFF MODEL 60
4.1. Overview of methodology ................................................................................ 60
4.2. Adaptive updating algorithm ............................................................................ 61
4.3. Prediction and error estimation ........................................................................ 64
4.4. Distributed updating for an entire watershed ................................................... 66
4.4.1. Definitions ................................................................................................. 67
4.4.2. Gain calculation for non-observation point mesh cells ............................. 68
4.4.3. Updating factor calculation – inverse distance weighting interpolation ... 68
4.4.4. Updating factor calculation – linear variation method .............................. 69
4.5. Partial distributed updating............................................................................... 73
4.6. Application ....................................................................................................... 74
4.7. Conclusion ........................................................................................................ 78
5. AI-BASED ERROR CORRECTION FOR RAINFALL-RUNOFF MODELING .. 79
5.1. Procedure of AI-based error correction approach............................................. 79
5.2. Genetic programming for error correction ....................................................... 80
5.2.1. Genetic programming calculation procedure ............................................ 82
5.3. Feedforward artificial neural network for error correction .............................. 85
5.4. Self-organizing map for data clustering ........................................................... 85
5.5. Application ....................................................................................................... 87
5.5.1. Problem formulation .................................................................................. 88
5.5.2. Training, cross-check and verification data ............................................... 88
5.5.3. Results ....................................................................................................... 89
5.6. Conclusion ........................................................................................................ 92
6. INTERPOLATION OF RUNOFF PREDICTIONS FOR DISTRIBUTED FLOOD
FORECASTING............................................................................................................. 94
6.1. Proposed interpolation strategy ........................................................................ 94
6.2. Local linear modeling ....................................................................................... 95
6.2.1. Introduction ............................................................................................... 95
6.2.2. Nearest neighbors search ........................................................................... 96
6.3. Global regression .............................................................................................. 97
6.4. Choice of query vector form ............................................................................. 97
6.4.1. Temporal correlation between elements .................................................... 98
iv
Contents
6.4.2. Additional elements ................................................................................... 98
6.5. Application ....................................................................................................... 99
6.6. Results and discussion .................................................................................... 101
6.7. Conclusion ...................................................................................................... 105
7. PROBABILISTIC FLOOD FORECASTING ....................................................... 106
7.1. Modeling uncertainty in flood forecasts ......................................................... 106
7.2. Probabilistic flood forecast formulation ......................................................... 108
7.2.1. Precipitation uncertainty .......................................................................... 109
7.2.2. Hydrologic uncertainty ............................................................................ 109
7.2.3. Combining precipitation uncertainty and hydrologic uncertainty ............110
7.3. Application ......................................................................................................112
7.4. Conclusion .......................................................................................................114
8. EVACUATION DECISION ....................................................................................115
8.1. Decision model ................................................................................................115
8.1.1. Estimating potential costs .........................................................................116
8.1.2. Estimating inundation probability and severity ........................................116
8.1.3. Evacuation decision formulation and timing of the evacuation ...............119
8.1.4. Objective function formulation ............................................................... 121
8.1.5. Risk aversion ........................................................................................... 122
8.2. Demonstration of the evacuation decision framework ................................... 123
8.3. Evacuation path planning using probabilistic information ............................. 128
8.4. Conclusion ...................................................................................................... 130
9. CONCLUSION ...................................................................................................... 132
REFERENCES ............................................................................................................. 135
v
List of Figures
LIST OF FIGURES
Figure 2-1: Mesh cell model............................................................................................. 8
Figure 2-2: Arrangement of land use categories on a mesh cell surface .......................... 9
Figure 2-3: Discharge routing within a mesh cell .......................................................... 10
Figure 2-4: Flow routing map structure ...........................................................................11
Figure 2-5: 8-direction flow routing scheme .................................................................. 12
Figure 2-6: Finite difference mesh used in Beven kinematic wave routing model ........ 14
Figure 2-7: Combination of surface and layer A flows .................................................. 16
Figure 2-8: Rectangular and trapezoidal channel cross-sections.................................... 17
Figure 2-9: Nagara River basin ...................................................................................... 19
Figure 2-10: (a) Coverage of Gozaisho and Jyatoge weather radar facilities, (b)
topographical map of the Nagara River watershed ................................................ 21
Figure 2-11: (a) Flow routing map for the Nagara River watershed, (b) map of dominant
land use within each mesh cell ............................................................................... 22
Figure 2-12: Percentage cover within each mesh cell of (a) forest, (b) field, (c) urban
area, (d) paddy field, (e) water body ...................................................................... 23
Figure 2-13: Example simulation results for (a) Chusetsu, and (b) Akutami ................. 24
Figure 3-1: Observed rainfall intensity pattern described as a 3-dimensional surface ... 26
Figure 3-2: Vector fields for (a) Case 1, and (b) Case 2 (11/9/2000 20:55 - 21:00)....... 28
Figure 3-3: Time series of translation vector parameters c1 ~ c6, 10/9/2001.................. 31
Figure 3-4: Sample autocorrelation functions of c1 ~ c6, 10/9/2001 .............................. 32
Figure 3-5: Time series of c1 ~ c6 , 10/9/2001 .......................................................... 34
Figure 3-6: Sample autocorrelation functions of c1 ~ c6 , 10/9/2001........................ 35
Figure 3-7: Selected sample cross-correlation functions of c1 ~ c6 , 10/9/2001 ....... 36
Figure 3-8: (a) Optimal calculated rainfall pattern (mm/hr) for 11 September 2000 21:00,
(b) corresponding calculated residual growth-decay field (mm/hr/5-min). ........... 40
Figure 3-9: Distributions of observed growth-decay rate frequencies for various values
of RA ........................................................................................................................ 44
Figure 3-10: Variation of (a) scale and (b) shape parameters with RA for lognormal
distribution .............................................................................................................. 46
Figure 3-11: Variation of (a) scale and (b) shape parameters with RA for Weibull
distribution .............................................................................................................. 46
Figure 3-12: Series of I(h) for residual growth-decay field (11/9/2000 21:00) .............. 48
Figure 3-13: Time series of I(1) and I(2) for residual growth-decay fields for 11/9/2000
15:00 ~ 21:00 (No radar observation available for 18:55) ..................................... 48
vi
List of Figures
Figure 3-14: Three-stage process for stochastic rainfall generation ............................... 52
Figure 3-15: Observed rainfall field at 11/9/2000 21:00 (t = 0) ..................................... 54
Figure 3-16: Simulated time series of parameters (a) c3, and (b) c6 ............................... 54
Figure 3-17: Simulated time series of parameters (a) c7, (b) c8, and (c) c9 .................... 55
Figure 3-18: Simulated rainfall fields, 11/9/2000, (a) 21:05 (t = 1), (b) 21:30 (t = 6) ... 55
Figure 3-19: Simulated rainfall fields, 11/9/2000, (a) 22:00 (t = 12), (b) 03:00 (t = 72) 56
Figure 3-20: Simulated results, 21:05: (a) white noise field, (b) growth-decay field .... 56
Figure 3-21: Simulated rainfall fields, 11/9/2000, (a) 21:05 (t = 1), (b) 21:30 (t = 6) ... 57
Figure 3-22: Simulated rainfall fields, 11/9/2000, (a) 22:00 (t = 12), (b) 03:00 (t = 72) 57
Figure 3-23: Series of I(h) for simulated growth-decay field (11/9/2000 21:05) ........... 58
Figure 4-1: (a) Channel updating model (left), and (b) surface and layer A runoff
updating model (right) ............................................................................................ 63
Figure 4-2: Recursive filtering algorithm for estimation of adaptive gain parameter and
updating of a distributed rainfall-runoff model’s discharge ................................... 64
Figure 4-3: Basin mesh cell categories applied to the Nagara River watershed ............ 67
Figure 4-4: Influence of observation points on each mesh cell of the Nagara River
watershed: (a) Inari, 1 , (b) Shimohorado, 2 , (c) Mino, 3 , (d) Chusetsu, 4 .. 72
Figure 4-5: Updating results for Akutami (Event 1)....................................................... 76
Figure 4-6: Prediction results for Chusetsu (Event 2) .................................................... 77
Figure 4-7: Prediction results for Chusetsu (Event 3) .................................................... 77
Figure 5-1: Schematic of proposed AI-based discharge forecasting approach for river
basin locations with real-time discharge observation data ..................................... 80
Figure 5-2: Parse tree representation .............................................................................. 82
Figure 5-3: Crossover ..................................................................................................... 84
Figure 5-4: Mutation ....................................................................................................... 84
Figure 5-5: GP procedure flowchart ............................................................................... 84
Figure 5-6: Basic structure of a self-organizing map ..................................................... 87
Figure 5-7: Runoff predictions for Chusetsu (16-17/7/2001) ......................................... 91
Figure 5-8: Runoff predictions for Chusetsu (14-16/9/2001) ......................................... 91
Figure 5-9: 3-hour ahead runoff predictions for Chusetsu (14-16/9/2001) .................... 92
Figure 6-1: Nagara River flow routing map and discharge observation stations ......... 100
Figure 6-2: Observed discharge, Event 1: 23-28/4/2003 .............................................. 101
Figure 6-3: Observed discharge, Event 2: 11-13/7/2003 .............................................. 101
Figure 6-4: Interpolation for Mino, (23-28/4/2003) ..................................................... 102
Figure 6-5: Interpolation for Mino, (11-13/7/2003) ..................................................... 103
Figure 6-6: Extrapolation for Shimohorado, (23-28/4/2003) ....................................... 103
vii
List of Figures
Figure 6-7: Extrapolation for Shimohorado, (11-13/7/2003) ....................................... 104
Figure 7-1: Ensemble forecast for Chusetsu made at 21:00 11 September 2000 ..........113
Figure 7-2: Probabilistic forecast of discharge considering precipitation uncertainty,
21:00 11 September 2000, Chusetsu .....................................................................113
Figure 8-1: (a) PDF of inundation levels, and (b) severity curve ..................................118
Figure 8-2: (a) PDF of discharge rates for a location under analysis for a given future
point in time, (b) Severity curve for location under analysis ................................119
Figure 8-3: Evacuation progress index ......................................................................... 120
Figure 8-4: Multi-stage decision model........................................................................ 121
Figure 8-5: Utility function .......................................................................................... 123
Figure 8-6: Mino flood hazard map .............................................................................. 125
Figure 8-7: Conceptual flood risk maps for real-time evacuation path planning ......... 130
viii
List of Tables
LIST OF TABLES
Table 2-1: Rainfall-runoff modeling strategies and application to flood prediction ........ 6
Table 2-2: Land use groupings for Hydro-BEAM............................................................ 8
Table 2-3: Land use regions and sub-cell structure .......................................................... 9
Table 2-4: Infiltration and roughness coefficients for each land use type and channels. 24
Table 3-1: Parameter combinations and corresponding modeled phenomena ............... 28
Table 3-2: Parameterization of the lognormal and Weibull distribution ........................ 42
Table 3-3: Cumulative probabilities for growth-decay rates for values of 1mm/hr ≤ RA <
5mm/hr ................................................................................................................... 45
Table 3-4: Cumulative probabilities for growth-decay rates for values of RA = 0mm/hr 45
Table 3-5: Distribution parameters as functions of RA, for RA ≥ 5mm/hr ....................... 46
Table 4-1: Watershed mesh cell categorization .............................................................. 67
Table 4-2: Mesh cell types for partial distributed updating ............................................ 73
Table 4-3: Updating parameters ..................................................................................... 76
Table 4-4: Storm events used in application ................................................................... 76
Table 5-1: Prediction error comparison .......................................................................... 90
Table 6-1: Global regression results for Mino and Shimohorado ................................ 104
Table 8-1: Severity curve parameters ........................................................................... 124
Table 8-2: Evacuation curve parameters ...................................................................... 124
Table 8-3: Probabilistic flood forecast data .................................................................. 126
ix
Introduction
1. INTRODUCTION
It has long been the goal of flood forecasting to provide timely and accurate estimates of
future discharge conditions at specific watershed locations. The objective of this
research is to develop a flood forecasting system that not only provides accurate flood
level forecasts, but is also capable of providing probabilistic forecasts at all locations
within a river network.
In order to achieve a shift away from the traditional flood prediction framework which
focuses primarily on using point rainfall observations and lumped parameter or
statistical models to make deterministic best-guess predictions of runoff rates for only a
handful of locations within a river basin, a distributed rainfall-runoff model is chosen to
simulate rainfall-runoff dynamics. Distributed rainfall-runoff models have been used in
recent years for a range of different water quantity and quality simulations, however
little attention has been given to the task of short-term flood forecasting. The distributed
nature of such models provides the potential for simulations of superior accuracy to
purely data-driven or lumped parameter forecasts, and allows flood forecasts to be made
at all locations within a watershed.
As a distributed rainfall-runoff model is being used for real-time flood simulation and
forecasting a compatible technique for assimilating real-time discharge observations is
required. An adaptive updating procedure and an alternative artificial intelligence-based
error correction model are developed and shown to be effective in improving the
performance of the distributed rainfall-runoff model.
While much attention has been devoted to increasing the accuracy of flood forecasts,
there is also a largely unfilled need to provide a measure of the confidence that can be
placed in a given forecast. No forecast of hydrological conditions can be perfect, and
often is the case that too much faith is placed in a ‘best’ prediction of future conditions,
which can potentially lead to non-optimal decisions being made during the period
leading up to a flood.
It is recognized that the inability to accurately predict short-term rainfall conditions is a
major source of error in discharge predictions. For this reason, a Monte Carlo
simulation approach is used to generate a range of future possible rainfall conditions
based on recent observations of rainfall dynamics in the considered region. These
1
Introduction
patterns are input into the distributed rainfall-runoff model to generate simulated
forecast hydrographs and to allow the future discharge of a river network to be
described in a probabilistic sense.
The proposed framework is comprised of the following system components:
A distributed rainfall-runoff model capable of describing a watershed in terms of
the distributed geographical properties of the watershed, and capable of converting
rainfall patterns into discharge at each location within the watershed (Chapter 2).
A rainfall simulation model capable of analyzing radar-observed rainfall patterns
and stochastically generating future rainfall patterns (Chapter 3).
An adaptive updating scheme for a distributed rainfall-runoff model capable of
utilizing real-time river discharge observations to reduce forecast error (Chapter 4).
An AI-based error forecasting model for use with a rainfall-runoff model and an
interpolation scheme for making predictions of distributed runoff conditions
(Chapter 5).
A Monte Carlo simulation strategy for combining the rainfall simulation model and
the distributed rainfall-runoff model to provide a probabilistic forecast of future
watershed discharge conditions (Chapter 6).
A strategy for producing a probabilistic flood forecast considering the combined
effects of all input and model uncertainties (Chapter 7).
A decision support tool for making optimal evacuation decisions for residents
within the target watershed (Chapter 8).
Example applications are provided for the Nagara River located in Gifu Prefecture,
Japan. A 6-hour-ahead forecast is desired so as to provide sufficient time for the issuing
of evacuations and appropriate operation of flood mitigation structures and machinery.
2
Distributed Rainfall-Runoff Modeling
2.
DISTRIBUTED RAINFALL-RUNOFF MODELING
A rainfall-runoff model is a fundamental component of a short-term flood forecasting
system. In this chapter a number of rainfall-runoff modeling strategies are discussed,
followed by an introduction of the distributed rainfall-runoff model Hydro-BEAM,
which has been chosen for use within the probabilistic distributed flood forecasting
system developed in this thesis.
2.1. Rainfall-runoff modeling strategies
Rainfall-runoff modeling is the process of transforming a rainfall hyetograph into a
runoff hydrograph. This can be achieved through the use of data-driven or statistical
mathematical techniques, through developing physical descriptions of the rainfall-runoff
process, or through various combinations of these approaches.
Data-driven statistical techniques have received much attention in recent years, for their
ability to infer relationships between observed hydrological time series and future
watershed conditions. The autoregressive moving average (ARMA) and related time
series models of Box and Jenkins (1976) have been used in modeling various water
resources systems in the past. It was noted by Hsu et al. (1995) that linear time series
models such as these do not attempt to represent the nonlinear dynamics inherent in the
transformation of rainfall to runoff and that as a result they could not always be relied
on to perform well.
A number of alternatives to these time series models have been explored in recent years,
which are capable of modeling non-linear processes, including artificial neural networks
(ANN), Genetic Programming (GP), and Support Vector Machines (SVM).
A number of studies into the application of ANN to rainfall-runoff modeling and flood
forecasting have been carried out (Karunanithi et al., 1994; Lorrai and Sechi, 1995;
Campolo et al., 1999). Hsu et al. (1995) compared ANN models with traditional black
box models, concluding that an ANN model is capable of giving superior performance
over a linear ARMAX (autoregressive moving average with exogenous inputs) time
series approach, when observed time series of flow rate and rainfall are used as input. In
general, ANN have been found to perform well in predicting short-term flood stage for
flood events closely resembling in magnitude previous flood events used for training the
networks. ANN models, however, tend to perform poorly during extreme events, and
3
Distributed Rainfall-Runoff Modeling
for this reason Elshorbagy and Simonovic (2000) warn against using ANN models as
the sole runoff prediction strategy. Also, it is difficult to determine the optimal ANN
architecture for a given watershed, and in most cases, a trial-and-error approach is still
used.
GP is an evolutionary algorithm technique based on Darwin’s theory of natural selection.
Unlike the associated Genetic Algorithm techniques that have found wide-spread use in
parameter optimization of water resources systems (Cai et al., 2001; Cheng et al., 2002),
GP is used to find a function that best fits a given data set, by searching a domain of all
possible solutions. A study was conducted by Liong et al. (2002) applying GP to the
problem of determining the relationship between future runoff and recently observed
rainfall and runoff data, at the outlet of the Upper Bukit Timah watershed in Singapore.
It was concluded that the functional relationships determined using GP could be used to
give a reasonable short-term forecast superior to the naïve persistence forecasting
technique.
SVM, from the field of control theory and based on the principle of structural risk
minimization, have been shown to have excellent time series prediction capabilities
(Vapnik, 1995). SVM has been demonstrated to be a robust flood stage-forecasting tool
(Liong and Sivapragasam, 2002), and unlike ANN, SVM have the advantage that the
model architecture need not be defined a priori, however the problem of optimal
parameter identification requires further research.
In contrast to the data-driven techniques described above, conceptual and physical
models require a considerable amount of effort to develop and use, requiring a set of
equations that can adequately describe the hydrological processes being modeled, as
well as calibration of the large number of parameters involved. Such models, however,
have the benefit that they attempt to incorporate an understanding of the internal subprocesses of the rainfall-runoff process and are therefore less likely than the data-driven
techniques to give wild or unrealistic predictions, especially when modeling rare or
extreme flood events.
One of the early pioneering lumped methods for forecasting runoff based on an
observed rainfall hyetograph was the unit hydrograph method (Sherman, 1932), which
is based on the assumption that a watershed is a linear system, and that rainfall intensity
is uniform over a watershed. Lumped models, however, do not account explicitly for the
4
Distributed Rainfall-Runoff Modeling
spatial variability of hydrologic processes, using averages to represent spatially
distributed properties (Ramírez, 2000).
An alternative to the lumped parameter model is the distributed rainfall-runoff model,
which attempts to describe all surface and subsurface flow phenomena. Many
distributed rainfall-runoff models, including Hydro-BEAM which is introduced in the
next section, employ variations of the kinematic wave model for flow routing (e.g.
Ishihara and Takasao, 1963). The required effort in setting up a model is further
increased when using such models, as a detailed description of the watershed and gridbased hydrological inputs such as rainfall, are required. Distributed rainfall-runoff
models have long been unsuitable for application to real-time flood forecasting, due to
the large number of calculations that must be performed to run a simulation for an entire
watershed, and due to the unavailability of a filtering technique for the improvement of
a forecast based on real-time observation of flood stage.
Computers have roughly doubled in speed every two years over the past four decades,
closely following Gordon Moore’s 1965 forecast, that the number of transistors per
square inch on a computer chip would double every 18 months (Moore, 1965). As a
result of this phenomenon, it is becoming increasingly possible to simulate flood events
using computer resource intensive distributed rainfall-runoff models at such a
computing speed that the results may be used for real-time forecasting of flood events.
Similarly, developments in remote sensing have produced an abundance of detailed
accurate geographical survey data relevant to distributed modeling of watersheds such
as digital elevation maps (DEM) and land use information, for many regions throughout
the world.
As access to satellite and radar observation technology improves, and with Moore’s
Law likely to remain valid for a number of years to come, further increases in
simulation detail and speed will be realized. Also, considering that generic software
tools can be readily developed to automatically fit distributed models to watersheds
when provided with the necessary geographical data, there will likely be a move in the
near-future away from the simplistic black box or lumped forecasting models to
potentially more accurate distributed rainfall-runoff models.
The use of the distributed rainfall-runoff model Hydro-BEAM for short-term flood
stage forecasting is investigated in this research, due to its potential for highly-accurate
5
Distributed Rainfall-Runoff Modeling
flood modeling, and for its ability to provide runoff simulation results for all areas of a
watershed.
A summary of the various rainfall-runoff modeling strategies currently in use is given in
Table 2-1.
Table 2-1: Rainfall-runoff modeling strategies and application to flood prediction
Modeling approach
Black box /
regression
Examples
GP
ANN
SVM
ARMA
Lumpedparameter
Tank model
Unit hydrograph
Distributed
Kinematic wave
Dynamic wave
Physical
Comments
Advantages:
Rapid calculation
Flood
stage
prediction
capability documented
Easy setup
No detailed description of
hydrological system required
Disadvantages:
Prone to giving unrealistic
predictions during extreme
events
Advantages:
Rapid calculation
Flood
stage
prediction
capability documented
Advantages:
Potential for highly-accurate
simulations
Calculation of distributed
watershed discharge
Disadvantages:
Requires detailed input data
set and lengthy setup period
Computer resource-intensive
Few examples available of
real-time use for flood
prediction
2.2. Hydro-BEAM
Hydro-BEAM (Hydrological Basin Environmental Assessment Model) is being
developed by the Water Resources Research Center of Kyoto University for the purpose
of distributed rainfall-runoff simulation. It is noted that a large number of other
distributed rainfall-runoff models have also been developed such as the Topography
6
Distributed Rainfall-Runoff Modeling
Based Hydrological Model (TOPMODEL) (Beven et al., 1995), Systeme Hydrologique
Europeen (SHE) model (Bathurst, 1986), and TOPOG_IRM (Zhang et al., 1999).
Hydro-BEAM was first developed by Kojiri et al. (1998) as a tool to assist in simulating
long-term fluctuations in water quantity and quality in rivers through an understanding
of the hydrological processes that occur within a watershed. It has since been used in a
pioneering work on comparative hydrology, where a methodology for assessing the
similarity between watersheds was proposed (Park et al., 2000), to investigate sediment
transport processes in the large watershed of the Yellow River, China (Tamura and
Kojiri, 2002), and to investigate pesticide levels in rivers and their effects on hormone
levels in fish (Tokai et al., 2002).
Hydro-BEAM is used for the first time in this study for real-time flood stage forecasting,
in collaboration with Mitsui Consultants Co., Ltd. of Japan. The use of a distributed
rainfall-runoff model allows simulation and prediction of discharge levels at every point
within a watershed’s channel network, rather than just at a handful of specified locations
as with lumped-parameter hydrological models. It is reasoned that the spatially and
temporally-detailed input data used by Hydro-BEAM will enable flow routing to be
modeled with an accuracy higher than that currently achieved by lumped model
counterparts commonly in use today.
2.3. Hydro-BEAM structure
The watershed is modeled as a uniform array of multi-layered mesh cells, each
containing information regarding surface land use characteristics, ground surface slope
and runoff direction, and the presence/absence of a channel. The original Hydro-BEAM
model that uses four shallow subsurface layers can be calibrated to include only two
subsurface layers as described in the following sections, to allow for faster real-time
calculation where necessary. Evaporation losses during a flood event are ignored in this
study, as their magnitude is considered negligible during a flood event. Water quality
modeling functions of Hydro-BEAM are also removed.
2.3.1. Mesh cell model
The watershed to be investigated is divided into an array of unit mesh cells. A mesh cell
can be arranged as a combination of a surface layer and several subsurface layers. The
following description considers Hydro-BEAM calibrated with only two subsurface
7
Distributed Rainfall-Runoff Modeling
layers, labeled A and B. Both subsurface layers are assumed to have a slope equal to the
slope of the ground surface. The mesh cell model is depicted in Figure 2-1.
Figure 2-1: Mesh cell model
Land use data available from satellite survey is grouped into five standard categories as
given in Table 2-2. If necessary, these categories and definitions can easily be adjusted
to better suit the peculiarities of the particular watershed being modeled. The ground
surface land use characteristics of a mesh cell are modeled as demonstrated in Figure
2-2, with land use types grouped and represented as a percentage land cover of the total
area of the mesh cell.
Table 2-2: Land use groupings for Hydro-BEAM
Category
Forest
Field
Urban area
Paddy field
Water body
Description
Densely-vegetated regions
Agricultural regions including farms and orchards
Paved or otherwise impervious urban regions
Regions composed of paddy fields
Bodies of water including inland waters and the sea.
8
Distributed Rainfall-Runoff Modeling
Satellite image
Modeled surface
Figure 2-2: Arrangement of land use categories on a mesh cell surface
Land use information is used to specify the structure of a sub-cell, and its infiltration
and runoff characteristics. Three different sub-cell structures are created as given in
Table 2-3 to suit the various land use types.
Table 2-3: Land use regions and sub-cell structure
Sub-cell type
Mountain
City
Water
Category
Forest, field
Urban area
Paddy field, water body
Sub-cell structure
Layer A
Infiltration
Yes
Yes
No
No
No
Yes
Discharge from each mesh cell is calculated based on the discharge from each land use
type sub-cell. A precipitation input for each sub-cell is determined relative to the
percentage cover of the land use type, resulting in surface runoff to an adjacent river
channel or downstream mesh cell, or infiltration to a subsurface layer. It is assumed that
100% of the runoff that infiltrates to layer B is lost to groundwater recharge, with
discharge from layer A and surface discharge being routed to the nearest downstream
river channel. Discharge routing within a mesh cell that does not contain a river channel,
is described in Figure 2-3.
9
Distributed Rainfall-Runoff Modeling
Rainfall
Rainfall
Forest
Field
Layer A
Layer A
Paddy field
Water body
Urban area
Lateral flow
Infiltration
Groundwater
Downstream
mesh cell
Figure 2-3: Discharge routing within a mesh cell
2.3.2. Watershed model
In order to route the discharge in a watershed resulting from a precipitation event to the
watershed mouth, it is necessary to connect the mesh cells that comprise the watershed
through the use a flow routing map. The function of a flow routing map is to define a
downstream destination for the discharge resulting from every cell in the watershed,
with the exception of the furthest downstream mesh cell located at the watershed mouth.
A procedure to determine a flow routing map for a generic watershed was developed in
this research as part of a semi-automated model calibration tool to be used with HydroBEAM. The procedure for determining a flow routing map is outlined here.
A combination of a digital elevation map and a printed watershed map can be used to
achieve the following:
- Determination of the watershed boundary location.
-
Division of the watershed into a regular grid of mesh cells.
Determination of a flow routing network based on mesh cell elevation as given by a
DEM and checked against a printed map.
Flow direction from any given mesh cell can be estimated using a simple algorithm
where information is not otherwise available from ground surveys of channel positions.
The algorithm chooses a runoff path to be in the direction with the greatest slope as
10
Distributed Rainfall-Runoff Modeling
determined by a DEM, with alterations made to remove areas where ponding will occur
due to a mesh cell having an elevation below that of each of its surrounding mesh cells,
or where a complete path from every mesh cell to the furthest downstream point of the
watershed is not achieved.
An example flow routing map is shown in Figure 2-4. As can be seen, using regularshaped mesh cells, it is difficult to exactly match the modeled surface boundary with the
boundary of the watershed, however the error associated with this difference is
generally small, especially with watersheds with a surface area greater by an order of
three than that of the unit mesh cell.
Flow direction
Mesh cell
Actual
watershed
boundary
Watershed
mouth
Mesh with channel
Mesh without channel
Figure 2-4: Flow routing map structure
Hydro-BEAM was originally developed to use a 4-direction flow routing map. For this
research, however, Hydro-BEAM has been modified to allow 8-direction flow routing.
This has introduced the need to consider how to model runoff within mesh cells that
slope toward a diagonally-adjacent mesh cell, and to re-consider how to route flow
between mesh cells. The 8-direction flow routing scheme is described in Figure 2-5. The
major changes involve the need to distinguish between the flow from adjacent mesh
cells that enters laterally and that which enters from above a mesh cell. Also, the surface
of a diagonally sloping mesh cell is approximately represented as a rectangle with
dimensions 2l by l 2 for the sake of surface runoff calculations. The channel
length is increased to be 2l , where l is the length of a mesh cell. Mesh cells are
classified as above or laterally positioned, depending on their position relative to the
11
Distributed Rainfall-Runoff Modeling
downstream receiving mesh cell. The two possible cases are shown in the upper-left
corner of Figure 2-5, with mesh cells positioned above the receiving mesh cell colored
green and with laterally-positioned mesh cells colored blue. As with Figure 2-4, mesh
cells containing a river channel contain a navy-colored arrow.
For the case of 8-directional flow to a downstream cell (colored orange) containing a
river channel, surface flow entering from laterally-positioned upstream mesh cells is
distributed along the length of the downstream mesh cell’s boundary, and surface flow
entering from above is routed directly to the upstream boundary of the adjacent
downstream channel. Channel flow is routed from all upstream mesh cells, whether
positioned above or laterally, directly to the upstream boundary of the downstream mesh
cell’s channel.
Figure 2-5: 8-direction flow routing scheme
2.4. Hydro-BEAM flow routing theory and equations
A finite difference approximation of the kinematic wave model can be used to model
12
Distributed Rainfall-Runoff Modeling
watershed runoff on the surface and in layer A. The kinematic wave model is described
using the following equations:
A q
2-1
r (t , x )
t x
q f ( x, A)
2-2
where A is cross-sectional flow area [m2], q is discharge [m3/s], t is time [s], x is
longitudinal distance along a channel or surface [m], and r is lateral inflow per unit
length of flow [m3/m.s] equal to the sum of precipitation and inflow from adjacent areas
minus losses due to infiltration.
The Kinematic wave model ignores inertial and pressure forces and is based on the
Saint-Venant equations. The main assumptions for the Saint-Venant equations are as
follows:
Flow is one-dimensional
The slope of the channel bottom is small
The vertical pressure distribution is hydrostatic and wave lengths are large
compared with water depth
The fluid being modeled is incompressible
The necessary initial and boundary conditions for the kinematic wave model used in a
distributed rainfall-runoff simulation model are as follows:
2-3
A(0, x) A0 ( x), 0 x L
A(t,0) AB (t ), 0 t
2-4
where L is the length [m] of the channel or slope being modeled, A0 is the crosssectional area of flow at time t = 0, and AB is the cross-sectional area at the upstream
mesh cell boundary.
2.4.1. Finite difference approximation of the kinematic wave equation
The kinematic wave equations presented here do not have an explicit analytical solution,
however a range of finite difference numerical solutions may be used, which involve
solution of the partial differential equations on an x-t plane divided into a grid.
One finite difference approximation of the kinematic wave model described in Equation
2-1 and Equation 2-2 is the scheme developed by Beven (1979), given below.
13
Distributed Rainfall-Runoff Modeling
qt 1 qt 1
qt qt
qit 1 qit
2-5
cit1/1 2 i 1 i r 1 cit1/ 2 i 1 i r 0
t
x
x
Here the subscript refers to the space coordinate and the superscript refers to the time
coordinate, α is a time weighting parameter, and:
2-6
ci 1 2 0.5(ci ci 1 )
where c is the kinematic wave velocity:
dq
2-7
c
dA
The solution is calculated along a time line from upstream to downstream as shown in
Time, t
Figure 2-6.
t+1
Known points
Δt
Unknown points
t
Δx
xi
xi+1
Distance, x
Figure 2-6: Finite difference mesh used in Beven kinematic wave routing model
2.4.2. Linear approximation method
In the case of the above finite difference approximation of the kinematic wave equation,
problems related to instability of the approximation, especially when using larger
temporal and spatial step sizes, occur. To some extent, these may be reduced by closely
observing the Courant condition, which states that a wave or hydrograph should not be
allowed to travel through a subreach x in a time less than the computational interval
t , such that
x
2-8
c
t
A linear approximation method developed by Shiiba (1993) has been found to be a
stable alternative to the kinematic wave approximation method given above, and is used
in this research. For a given cell, whether considering surface flow or flow in a channel,
the following notation is used:
iit, i = 1,M
Inflow from upstream cells (m3/s)
Qt
Discharge from downstream (m3/s)
14
Distributed Rainfall-Runoff Modeling
q(t,x)
rt
At
St
t
Flow rate at a given point (m3/s)
Lateral inflow (m3/s)
Flow area at a position in the cell (m2)
Storage within a sub-length of the channel or surface (m3)
Calculation time step (s)
Upstream boundary:
q(t,0) = iit , i = 1,M
Downstream boundary:
q(t,n) = Qt
where L is the length of the cell, divided into N segments, dividing points along the cell
labeled j = 0 (upstream) through to j = n (downstream).
Calculation proceeds by setting the two conditions that:
The relationship between flow rate and flow area is defined: q = f(A)
Flow rate q varies linearly from upstream to downstream within a cell
The following two equations describe the flow routing within a sub-length of the cell
based on the above conditions:
2-9
q j f Aj
q j j Q q0 N q0
2-10
The change in storage within the whole mesh cell over time step t is
S t iit rt Qn
2-11
where storage S can be calculated using trapezoidal interpolation such that
St Adx L N Aj 1 Aj 2
2-12
An approximation Qn of Q can then be calculated by reducing the following evaluation
function Fn to be approximately zero using the Newton-Raphson method, and making
use of Equation 2-9.
Fn t iit rt Qn S
t iit rt Qn Sn 1 Sn
2-13
t iit rt Qn Sn 1 L / N Aj 1 Aj 2
2.4.3. Surface flow in mountain regions
On mountain-type slopes, rainfall can easily penetrate the ground surface and infiltrate
into layer A. For this reason, the rainfall that initially falls on the surface is permitted to
flow within layer A with surface flow only occurring once layer A is full, as depicted in
15
Distributed Rainfall-Runoff Modeling
Figure 2-7. Only surface flow is considered for city and water-type slopes, since layer A
is impervious.
: Average surface slope (rad), D: Layer A thickness (m), w: Slope width,
HS: Surface flow depth, HA: Layer A flow depth
Figure 2-7: Combination of surface and layer A flows
The equation of momentum equivalent to Equation 2-2 for a mountain-type region is
based on the Manning formula:
q whk sinθγ+
/
whk sinθ /γ ,
sin(θ )
(w h γD)5/ 3 , h γD
n
h γ D
2-14
where h = HA + HS, and where it is assumed that the width w of the water body is much
greater than the height h, and where and k are the effective porosity and the
permeability, respectively, of layer A, and n is surface roughness.
2.4.4. Surface flow in city and water regions
It assumed that the rainfall input to city and water regions will develop into surface flow
without first requiring the ground surface to become saturated. The sheet flow model
can be described using the momentum equation given in Equation 2-15.
16
Distributed Rainfall-Runoff Modeling
q
sin(θ ) 2 / 3 5 / 3
w A
n
2-15
2.4.5. Channel flow
In Hydro-BEAM, the mesh cells containing channels are specified, with flow occurring
within these channels as a result of upstream inputs and lateral inflow from surface
runoff. The equation of momentum for flow within a channel with dimensions as shown
in Figure 2-8 is given in Equation 2-16. This simplifies to Equation 2-17 for the case of
a rectangular channel, where the side slope of the channel becomes / 2 .
Figure 2-8: Rectangular and trapezoidal channel cross-sections
sin(θ ) 5/ 3
2-16
A ( w 2h 1 z 2 ) 2 / 3
n
sin(θ ) 5/ 3
2-17
q
A ( w 2h) 2 / 3
n
Here w is the width of the base of the channel, and z cot where is the side slope
q
of the channel walls. A rectangular channel shape is assumed in this research.
2.5. Target watershed
The Nagara River (Figure 2-9) is a southward flowing river located in the Gifu and Mie
prefectures of Japan, and has a total catchment area of 1985 km2 (Ministry of
Construction, 2000). The river’s water is mainly used for irrigation and hydroelectricity
generation, and provides water for the Tokai region.
The Nagara River has undergone a number of improvements over the past centuries,
commencing with the flood mitigation works of the Dutch engineer Jogannes Derijke in
the 1870’s. Presently the majority of the 54km length of Nagara River’s main stream is
lined by concrete banks. No large dams, reservoirs, or weirs obstruct flow upstream of
the Chusetsu observation station. This makes the upper and middle sections of the
17
Distributed Rainfall-Runoff Modeling
watershed ideal for testing the forecasting method, as there is no need to consider
artificially stored water bodies.
The Nagara River watershed is also a good choice for application of the forecast as it
has a long history of flooding. Typhoon No. 17 of September, 1976 caused a heavy
storm, which resulted in a breach of the bank of Nagara River, causing an estimated
1000 million yen in damage (Ministry of Construction, 1980). More recently, a flood
event of considerable magnitude resulted from Typhoon No. 14 of September, 2000 for
the Nagara River and the neighboring watersheds of the Kiso and Ibi rivers. Presently,
the design high water discharge and high-water flood stage for the Nagara River at
Chusetsu are 7500m3/s (Ministry of Construction, 2000) and 6.68m (Ministry of
Construction, 1995), respectively.
Radar observations of precipitation conditions over the entire landmass of Japan are
made available in real-time by both the Japanese Ministry of Land, Infrastructure and
Transport, and by the Japan Meteorology Agency. Radar data is currently provided by
the former in the vicinity of the Nagara River watershed at five-minute intervals at a
spatial resolution of 1km by weather radars located at Gozaisho and Jyatoge, as shown
in Figure 2-10(a).
18
Distributed Rainfall-Runoff Modeling
Figure 2-9: Nagara River basin
19
Distributed Rainfall-Runoff Modeling
2.5.1. Model calibration
Hydro-BEAM is fitted to the Nagara River watershed using a combination of digital
survey data and printed maps to generate flow routing and land use maps, and using
rainfall and discharge observations for calibration of runoff and infiltration parameters.
The topography of the Nagara River watershed is shown in Figure 2-10(b) in the form
of a digital elevation map. A corresponding 8-direction flow routing map (Figure
2-11(a)) is calculated based on the topography and with reference to a map of the actual
location of channels. Each mesh cell within the flow routing map is color-coded
according to the number of mesh cells that lie upstream of the cell. This allows for easy
cross-checking of the positions of major and minor river channels against a printed map
of the watershed.
1556 mesh cells of approximately 1km2 in area are used to describe the upper and
middle catchment areas located upstream of Chusetsu. The land use of this area is
divided into 5 categories, and the percentage cover of each land use for each mesh cell
is extracted from data sets obtained from satellite images. The dominant land use type
of each mesh cell is shown in Figure 2-11(b), and the percentage cover within each
mesh cell of each land use type is shown in Figure 2-12.
The model parameters are calibrated through trial and error using observations from
typhoon events that occurred between 1992 and 1999, and the infiltration and roughness
coefficients for each land use type and channels are given in Table 2-4. Example
simulation results for a rainfall event that occurred over the period 19-20/6/2001 are
given in Figure 2-13 for Chusetsu and Akutami. Hourly rainfall averaged over every
mesh cell in the watershed is included in each figure for reference.
20
Distributed Rainfall-Runoff Modeling
Elevation (m)
Figure 2-10: (a) Coverage of Gozaisho and Jyatoge weather radar facilities, (b)
topographical map of the Nagara River watershed
21
Distributed Rainfall-Runoff Modeling
Figure 2-11: (a) Flow routing map for the Nagara River watershed, (b) map of
dominant land use within each mesh cell
22
Distributed Rainfall-Runoff Modeling
Figure 2-12: Percentage cover within each mesh cell of (a) forest, (b) field, (c)
urban area, (d) paddy field, (e) water body
23
Distributed Rainfall-Runoff Modeling
Table 2-4: Infiltration and roughness coefficients for each land use type and
channels.
Type
Forest
Field
Urban area
Paddy field
Water body
Channel
Infiltration coefficient (mm/hr)
0.2
0.2
0
0.1
0.1
0
1400
0
Roughness coefficient
0.3
0.2
0.05
2
0.01
0.05
1400
0
10
10
1200
1200
20
600
60
70
400
Rainfall
Calculated discharge
0:00
6:00
20/6/2001 Time
12:00
60
70
Rainfall
80
Observed discharge
200
90
Calculated discharge
100
18:00
50
600
80
0
12:00
40
400
Observed discharge
200
30
800
0
18:00
6:00
19/6/2001
Rainfall (mm/hr)
50
Discharge (m3/s)
40
800
6:00
19/6/2001
20
1000
30
Rainfall (mm/hr)
Discharge (m3/s)
1000
90
100
12:00
18:00
0:00
6:00
20/6/2001 Time
12:00
18:00
Figure 2-13: Example simulation results for (a) Chusetsu, and (b) Akutami
2.6. Conclusions
A distributed rainfall-runoff model is chosen for use in this research to provide
simulation results for each point within a watershed, rather than at only a limited
number of specific locations.
Hydro-BEAM has been chosen as a suitable distributed model and its structure and
underlying equations have been summarized. Modifications to Hydro-BEAM have been
made to allow for real-time flood routing, through removal of water quality and
evapotranspiration components, introduction of an 8-direction flow routing scheme, and
provision of the option to reduce the number of subsurface layers. Calibration for the
Nagara River watershed has been demonstrated.
24
Probabilistic Distributed Rainfall Forecasting
3.
PROBABILISTIC DISTRIBUTED RAINFALL FORECASTING
A procedure for probabilistically forecasting short-term distributed rainfall conditions is
developed in this chapter. This procedure involves the analysis of historical and current
stochastic properties of the translation, rotation and growth-decay characteristics of
rainfall so as to allow for the stochastic generation of the future development of
currently-observed rainfall fields.
The approach presented here is developed from the stochastic rainfall pattern simulator
proposed by Smith (2003) and Smith and Kojiri (2004). A Monte Carlo simulation
procedure based on a translation vector model is employed for modeling the temporal
and spatial dynamics of rainfall patterns in terms of their horizontal translation and
growth-decay properties. The procedure is based on a time series and statistical analysis
of the vector series that describe the radar-observed rainfall patterns. This procedure is
capable of generating distributions of future rainfall field time series sufficient for use in
forecasting short-term rainfall-runoff dynamics during periods of heavy rainfall. The
stochastically generated rainfall patterns can subsequently be input into the distributed
rainfall-runoff model Hydro-BEAM to produce an ensemble forecast of future discharge
conditions at all locations within a watershed.
3.1. Study location and rainfall data
An approximately 240km × 240 km region encompassing the entire Nagara River
watershed, located between 34°40’ and 36°40’N and 135°00’ and 138°00’E, is used as
the study location. A forecast horizon of up to 6-hours is considered in the case of this
study so as to allow ample time for evacuation warning, and as such this region is
chosen to encompass not only the target watershed, but also a buffer region surrounding
Nagara River that allows for a distance traversable by a rainfall field over a 6-hour
period.
Rainfall intensity within the target region is modeled as a surface on a Cartesian plane
divided into a rectangular mesh of dimension x y , where both x and y are
approximately 1km. Rainfall intensity at time t within a mesh cell with center
coordinates x, y, is described as z(x,y,t). The coordinates of this system are as follows:
xi i 0.5 x, i 1, , M
3-1
y j j 0.5 y , j 1, , N
Here M and N are the number of mesh cells in the x and y directions, respectively. An
25
Probabilistic Distributed Rainfall Forecasting
example rainfall intensity pattern converted from a rainfall echo observed using weather
radar is depicted in Figure 3-1.
Figure 3-1: Observed rainfall intensity pattern described as a 3-dimensional
surface
3.2. Modeling translation and rotation of rainfall fields
A rainfall translation model (Shiiba et al., 1984; Takasao et al., 1994) is used as the
basis for modeling and forecasting the movement of rainfall patterns.
The translation model describes the dynamics of the rainfall strength z at each mesh cell
x, y as:
z
z
z
3-2
u v
w
t
x
y
where u and v are the elements of the translation vector and w is the growth-decay head.
These variables are further described by the following one-dimensional functions:
u c1 x c2 y c3
v c4 x c5 y c6
3-3
w c7 x c8 y c9
Here, c1~c9 are parameters to be estimated through analysis of past rainfall patterns.
26
Probabilistic Distributed Rainfall Forecasting
3.2.1. Identification of translation vector parameters from rainfall patterns
In order to analyze the translation, rotation and growth-decay behavior of observed
rainfall pattern series the translation vector parameters must first be determined. In
order to identify the parameters,
Jc
1 M 1 N 1
v
k K i 2 j 2
2
ijk
is minimized, where
tk k t, k K , K 1,
3-4
3-5
,0
and (K+1) is the number of observations used over time period K t .
Here, vijk is defined as follows:
z
z
vijk c1 xi c2 y j c3
t ijk
x ijk
z
c4 xi c5 y j c6 c7 xi c8 y j c9
y ijk
3-6
Traditionally, translation vector parameters and the corresponding translation vectors
and the growth-decay head have been used to extrapolate the precipitation pattern series
into the future, in effect providing a simple short-term precipitation prediction, based on
the assumption that the identified parameters remain constant for a short period of time
(e.g. 1~2 hours).
3.2.2. Extrapolation of rainfall patterns
Extrapolation of a rainfall pattern forward in time over time step t proceeds through
tracing the pattern movement backwards along a characteristic curve defined for that
time step by the translation vector parameters, using the following differential
expressions:
dx t
c1 x t c2 y t c3
dt
dy t
3-7
c4 x t c5 y t c6
dt
dz t
c7 x t c8 y t c9
dt
The expressions in Equation 3-7 can be rearranged to determine an extrapolated pattern
for a time step of into the future:
27
Probabilistic Distributed Rainfall Forecasting
z x, y, t0 z x t0 , y t0 , t0 S ; c1 ,
x
, c9 y ,
1
3-8
x
x t0
R ; c1 , , c6 y
y
t
0
1
where S and R are 3 3 and 2 3 matrices, respectively.
Through repeating the above process for each time step using the corresponding
translation vector parameters, a series of future rainfall patterns can be generated.
Depending on the phenomena that need to be modeled, some of the parameters can be
omitted from the analysis (i.e. set to a value of zero). Table 3-1 gives examples of the
sets of parameters that can be used to model different combinations of translation,
rotation and growth-decay phenomena, and Figure 3-2(a) and Figure 3-2(b) give
example vector fields for parallel translation, and translation and rotation, respectively.
Table 3-1: Parameter combinations and corresponding modeled phenomena
Phenomena
Case 1: Parallel translation only
Case 2: Translation and rotation only
Case 3: Parallel translation, growth-decay
Case 4: Translation, rotation, growth-decay
c1
c2
c3 c4 c5
✓
✓ ✓ ✓ ✓ ✓
✓
✓ ✓ ✓ ✓ ✓
c6 c7 c8 c9
✓
✓
✓ ✓ ✓ ✓
✓ ✓ ✓ ✓
Figure 3-2: Vector fields for (a) Case 1, and (b) Case 2 (11/9/2000 20:55 - 21:00)
28
Probabilistic Distributed Rainfall Forecasting
3.3. Time series analysis of observed translation vector parameters
The translation model described above can be used to analyze the temporal variation of
rain fields through conversion of observations into series of vector parameters. Once
observed patterns have been converted to their corresponding translation vector
parameters, they can be analyzed using the autoregressive moving average (ARMA)
methodology (Box and Jenkins, 1976). ARMA processes have been used previously to
model the temporal variation of the translation vector parameters c3, c6, c7, c8, and c9,
which describe parallel translation and growth-decay phenomena (Smith and Kojiri,
2004).
The ARMA model is extended in this research to include the parameters that describe
rotation, and is modeled as a multivariate time series, recognizing that the translation
vector parameters may have not only serial dependence but also interdependence
between each parameter series.
3.3.1. ARMA time series analysis
The time series of vector parameters are analyzed here using autoregressive moving
average (ARMA) analysis. ARMA processes are defined by linear difference equations
with constant coefficients and can be used to model and forecast stationary time series.
{Xt} is an ARMA(p,q) process if {Xt} is stationary and if for every t,
X t 1 X t 1 p X t p Z t 1Z t 1 q Z t q
3-9
where {Zt} is a zero mean white noise process with variance 2 : {Z t } ~ WN(0, 2 ) ,
and the polynomials (1 1z p z p ) and (1 1z q z q ) have no common
factors.
Equation 3-9 can be represented using the concise form
B X t B Zt
3-10
The autoregressive (AR) operator of order p and the moving average (MA) operator of
order q can be expanded as
3-11
B 1 1B p B p
and
29
Probabilistic Distributed Rainfall Forecasting
B 1 1B
q B q
3-12
respectively, where 1 , 2 , , p are the AR parameters, and 1 , 2 ,
parameters and B is the backward shift operator ( B j X t X t j ).
, q are the MA
3.3.2. ARMA model identification
An ARMA(p,q) model can be fitted to time series data through inspection of the data,
identification and removal of any trend or seasonality, identification of the correlation
characteristics, and subsequent application of the Yule-Walker equations (Yule, 1927;
Walker, 1931). Appropriate estimates of p and q can be made considering the correlation
characteristics of the data.
Model identification and fitting for the time series of parameters c1 through c6 will be
discussed using parameters calculated from 5-minutely radar rainfall observations over
the period spanning 6:30 through 23:55, 10th September, 2001 (Figure 3-3).
A limitation of the translation vector model is that the vector parameters display erratic
behavior during periods of low rainfall. The ARMA model representation of vector
parameter fluctuations is inappropriate for periods when the rainfall field strength is on
average less than approximately 1.0mm/hr. This is not a serious limitation as the system
is to be used during periods of heavy rainfall in order to forecast flood conditions.
Inspection of the charts for vector parameters c1 ~ c6 suggests that the time series are
non-stationary. This is confirmed by the charts in Figure 3-4 which display slowly
decaying positive sample autocorrelation functions (ACF’s) and cross-correlation
functions (CCF’s), which is an indication that trend elimination through differencing is
necessary to acquire a stationary time series to which an ARMA model can be fitted.
A generalization of the ARMA class of time series models which incorporates a wide
range of non-stationary series is the ARIMA (AutoRegressive Integrated Moving
Average) class of processes. These are processes that through differencing can be
reduced to stationary ARMA processes, with {Xt} being an ARIMA(p,d,q) process if d
is a non-negative integer and Yt = (1-B)dXt is a causal ARMA(p,q) process.
30
0.15
0.1
0.1
0.05
c2 (km/hr/km)
c1 (km/hr/km)
Probabilistic Distributed Rainfall Forecasting
0.05
0
-0.05
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-0.15
6:30
21:30
10
0.15
5
0.1
0
-5
-10
-15
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
21:30
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
21:30
19:00
21:30
0.05
0
-0.05
-0.1
-20
6:30
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-0.15
6:30
21:30
0.15
10
0.1
5
0.05
c6 (km/hr)
c5 (km/hr/km)
-0.05
-0.1
c4 (km/hr/km)
c3 (km/hr)
-0.1
6:30
0
0
-0.05
-0.1
-5
-10
-15
-0.15
-0.2
6:30
0
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-20
6:30
21:30
9:00
11:30
14:00 16:30
Time (hr:min)
Figure 3-3: Time series of translation vector parameters c1 ~ c6, 10/9/2001
Differencing once at lag one produces the time series given in Figure 3-5 and the
corresponding ACF’s and CCF’s given in Figure 3-6 and Figure 3-7, which suggest that
an ARMA process may be suitable for the differenced series, equivalent to an
ARIMA(p,1,q) process for the non-differenced series. It is also necessary to consider
the possibility of cross-correlation between vector parameters. Some of the sample
cross-correlations ˆij ( h ), i j for the differenced series lie outside the significance
bounds of ±1.96n-0.5, within which approximately 95% of sample correlations should
fall in the case of non-correlated series. In order to test for independence between each
of the time series, maximum likelihood univariate ARMA models are fitted to each time
series separately, and the correlation between time series of residuals from the models
are examined. The hypothesis of independence between two series is rejected if it
observed that for any fixed h, ˆ12 (h) of the residuals of the two series do not fall
between the bounds of ±1.96n-0.5 with a probability of approximately 0.95. Inspection of
31
Probabilistic Distributed Rainfall Forecasting
the correlation between the time series of residuals indicates that strong interdependence
exists between the parameters c1 and c3, and c2 and c3, which are the parameters used to
describe translation in the x-direction and also between c4 and c6, and c5 and c6, which
are used to describe translation in the y-direction. This indicates the need to model the
translation vector parameters as multivariate time series. There exists only weak
dependence, if any, between other parameter combinations, and as such the x-direction
parameter time series (c1, c2 and c3) are treated as being independent of the y-direction
parameter time series (c4, c5 and c6) in this analysis.
1
Autocorrelation c1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Autocorrelation c3
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
4
8
12
16
20
Autocorrelation c4
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Autocorrelation c5
0
4
8
12
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
1
0.8
-0.2
Autocorrelation c2
16
20
Autocorrelation c6
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
0
4
8
12
16
Figure 3-4: Sample autocorrelation functions of c1 ~ c6, 10/9/2001
32
20
Probabilistic Distributed Rainfall Forecasting
If the multivariate time series processes Xt and Yt are defined as
ct1
ct1
c
c
t2
t2
c
c
X t t 3 , Yt X t X t 1 X t t 3
ct 4
ct 4
ct 5
ct 5
ct 6
ct 6
3-13
where is the lag-1 difference operator, defined such that X t X t X t 1 (1 B) X t ,
then a multivariate ARMA(p,q) process for {Yt} equivalent to a multivariate
ARIMA(p,1,q) process for {Xt} can be defined by requiring that {Yt} satisfies a set of
linear difference equations with constant coefficients.
{Yt} is an ARMA(p,q) process if {Yt} is stationary and if for every t,
Yt 1Yt 1 p Yt p Zt 1Zt 1 q Zt q
3-14
where {Zt} is zero mean white noise with covariance matrix Σ, written {Zt}~WN(0, Σ),
and the AR and MA coefficients { i }(i = 1, 2, …, p) and { i }(i = 1, 2, …, q) are real
m×m matrices. Also, {Yt} can be considered an ARMA(p,q) process with mean μ if {Yt
- μ} is an ARMA(p,q) process.
33
0.15
0.1
0.1
0.05
0.05
dc2 (km/hr)
dc1 (km/hr/km)
Probabilistic Distributed Rainfall Forecasting
0
-0.05
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-0.15
6:30
21:30
15
11:30
14:00 16:30
Time (hr:min)
19:00
21:30
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
21:30
19:00
21:30
0.1
dc4 (km/hr/km)
5
dc3 (km/hr)
9:00
0.15
10
0
-5
-10
0.05
0
-0.05
-15
-20
6:30
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-0.1
6:30
21:30
0.2
20
0.15
15
0.1
10
dc6 (km/hr)
dc5 (km/hr/km)
-0.05
-0.1
-0.1
-0.15
6:30
0
0.05
0
-0.05
0
-5
-0.1
-10
-0.15
-0.2
6:30
5
9:00
11:30
14:00 16:30
Time (hr:min)
19:00
-15
6:30
21:30
9:00
11:30
14:00 16:30
Time (hr:min)
Figure 3-5: Time series of c1 ~ c6 , 10/9/2001
34
Probabilistic Distributed Rainfall Forecasting
1
Autocorrelation dc1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Autocorrelation dc3
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
4
8
12
16
20
Autocorrelation dc4
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Autocorrelation dc5
0
4
8
12
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
1
0.8
-0.2
Autocorrelation dc2
16
20
Autocorrelation dc6
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
0
4
8
12
16
Figure 3-6: Sample autocorrelation functions of c1 ~ c6 , 10/9/2001
35
20
Probabilistic Distributed Rainfall Forecasting
1
Cross-correlation dc1,dc2
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Cross-correlation dc1,dc3
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
4
8
12
16
20
Cross-correlation dc4,dc6
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
Cross-correlation dc2,dc3
0
4
8
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
-0.2
0
1
0.8
-0.2
Cross-correlation dc4,dc5
12
16
20
Cross-correlation dc5,dc6
0
0
4
8
12
16
-0.2
20
-0.4
-0.4
-0.6
-0.6
-0.8
-0.8
-1
-1
1
0
4
8
12
16
20
Cross-correlation dc3,dc6
0.8
0.6
0.4
0.2
0
-0.2
0
4
8
12
16
20
-0.4
-0.6
-0.8
-1
Figure 3-7: Selected sample cross-correlation functions of c1 ~ c6 , 10/9/2001
An AR(2) model with zero mean is fitted to the differenced series {Yt} using YuleWalker estimation, for modeling parallel translation and rotation (Case 2). This is
equivalent to an ARIMA(2,1,0) model for {Xt}. The AR parameter matrices and the
white noise covariance matrix are given below.
36
Probabilistic Distributed Rainfall Forecasting
0
0
0
-.650 -.213 -.00122
-.338 -.644 -.00236
0
0
0
-.348
0
0
0
25.5 25.0
1
0
0
-0.487 -0.218 -.00176
0
0
0
0
0.260 -0.269 .00199
0
0
-18.4 -.0908 -.530
0
0
0
0
-.325 -.0253 -.000565
-.295 -.425 -.00264
0
0
0
-.0125
0
0
0
28.3 17.8
2
0
0
-.292 -.241 -.00175
0
0
0
0
.157 -.00102 .00106
0
0
-1.59
3.55
-.121
0
0
0
0
.00114 .000092 -.0998
.000092 .000658 -.0531
0
0
0
-.0531
13.2
0
0
0
-.0998
0
0
.000840 -.000087 -.0509
0
0
0
0
-.000087 .000813 -.0507
0
0
-.0509
-.0507
8.80
0
Inspection of the multivariate residual series of the model developed in this analysis
indicates that the ACF’s and CCF’s are negligible for all lags greater than zero, which is
a requirement for a well-fitted model.
A time series model for the case of parallel translation only (Case 1) is also fitted by
considering ct3 and ct6 as separate univariate processes. The time series and
autocorrelation functions for ct3 and ct6 differ from the series given in the above figures
for the 10/9/2001 as they are calculated without considering rotation of the rainfall field.
In this case, Xt and Yt are defined as
c
c
3-15
X t t 3 , Yt X t X t 1 X t t 3
c
c
t6
t6
and an ARMA(0,1) model with zero mean is fitted to the differenced series {Yt},
equivalent to an ARIMA(0,1,1) model for {Xt}. The AR and MA parameter matrices
and the white noise covariance matrix are given below.
37
Probabilistic Distributed Rainfall Forecasting
0
-0.689
1
-0.590
0
0
2.49
2.68
0
3.3.3. Generation of vector parameters
Future translation vector parameters can be stochastically generated based on time
series models estimated using the methodology proposed above. With each
extrapolation step, white noise Zt is sampled based on the characteristics of the
covariance matrix Σ. For a multivariate AR(p) model for {Yt}, initial values of Xt1,…,Xt-p,
Xt-p-1 are estimated during the identification process based on the four most
recently observed rainfall patterns, along with the corresponding values of Yt-1,…,Yt-p.
The simulation proceeds through solution of Equation 3-14 for each future time step up
to the desired forecast lead-time.
3.4. Time series analysis of growth-decay of rainfall fields
A time series model can be fitted to the parameters c7, c8 and c9 which comprise the
growth-decay vector w, using the same approach as for the parameters that describe
translation and rotation. Cross-correlation analysis indicates no correlation with
parameters c1 through c6, and as such the time series model for growth-decay is
developed independently.
Here Xt and Yt are defined as:
ct 7
ct 7
Xt ct 8 , Yt Xt Xt 1 Xt ct 8
ct 9
ct 9
3-16
The cross-correlation between c7, c8 and c9 is weaker than for translation and rotation
parameters, as is temporal dependence. The time series process {Xt} demonstrates weak
non-stationarity, and as such the differenced series {Yt} is used for fitting a time series
model. An AR(2) model is chosen for {Yt}, equivalent to an ARIMA(2,1,0) model for
{Xt}. The AR parameter matrices and the white noise covariance matrix identified for
the period spanning 6:30 through 23:55, 10th September, 2001 are given below.
38
Probabilistic Distributed Rainfall Forecasting
-0.566 -0.128 -0.000327
1 0.125 -0.530 0.00190
-11.7 -3.36
-0.800
-0.326 -0.0520 0.00026
2 0.0908 -0.0678 0.00259
-6.88
-25.0
-0.618
0.000984 0.000236 -0.0587
0.000236 0.000656 -0.0520
-0.0587
-0.0520
8.89
3.5.
Statistical analysis of growth-decay of rainfall fields
The translation vector model can be used to model growth-decay dynamics of regional
rainfall, however it is unable to account for the small variations that occur at the mesh
cell scale. As such, even if an observed rainfall pattern could be extrapolated into the
future over a 5-minute time step using a set of optimal vector parameters that would
give the best possible prediction, small errors between the prediction and the
corresponding observation would be observed due to the limitations of the model.
Tachikawa et al. (2003) developed a stochastic model of real-time rainfall prediction
error based on an analysis of the frequency distributions of prediction error of the
translation vector model. This approach was capable of stochastically modeling rainfall
growth-decay dynamics at the mesh cell level, with the minor drawback that the model
could not simulate rainfall conditions for a mesh cell once rain ceased to fall within that
cell.
An approach is developed here which considers a residual growth-decay term that is
added to each mesh cell following translation and rotation. This residual growth-decay
term is characterized by a distribution which is conditional on the rainfall strength at the
mesh cell and is considered to be spatially correlated with surrounding residual growthdecay terms. This approach can be used as an alternative to time series analysis for
modeling growth-decay of rainfall fields. It is designed to be used together with the time
series model for translation and rotation of rainfall fields.
In this approach, the growth-decay vector from Equation 3-2 is set as w = 0, and
replaced with a residual growth-decay term ε(x,y,t):
z
z
z
3-17
u v
t
x
y
39
Probabilistic Distributed Rainfall Forecasting
Observations of calculated residual growth-decay fields suggest that the distribution of
possible values of ε at a given mesh cell at a given time is primarily conditional on the
following factors:
i.
The magnitude of the extrapolated rainfall value at the target mesh cell (RA).
ii.
The average magnitude of the extrapolated rainfall at cells within the proximity
of the target cell (RB). For the examples used here a radius of two mesh cells is
used to define this area, which includes all adjacent cells, and all cells separated
by a distance of one cell from the target mesh cell.
iii.
The growth-decay values at surrounding mesh cells (spatial correlation).
The above can be easily observed from a cursory look at the example given in Figure
3-8 where (a) is the result of translation using the set of optimal model parameters
identified for the previous 5-minute time period, and (b) is the corresponding residual
growth-decay field, calculated as the difference between the translated field and the
corresponding observed rainfall field for that time step.
0
20
40
60
80
100 120
-45 -30 -15
Rainfall (mm/hr)
0
15
30
Error field (mm/hr/5min)
Figure 3-8: (a) Optimal calculated rainfall pattern (mm/hr) for 11 September 2000
21:00, (b) corresponding calculated residual growth-decay field (mm/hr/5-min).
Distributions of growth-decay values are determined using sets of historical radar
40
Probabilistic Distributed Rainfall Forecasting
rainfall observations. The residual growth-decay pattern for a given 5-minute time step
between two radar observations made successively at times t-1 and t0 can be calculated
through the following procedure:
i.
Identify the optimal translation vector parameters for the period between the
radar observations made at t-1 and t0.
ii.
Apply the translation vector parameters to the rainfall pattern observed at t-1 to
produce an extrapolated rainfall pattern for t0.
iii.
Subtract the optimal extrapolated pattern for t0 from the actual observed pattern
for t0.
3.5.1. Statistical analysis
Analysis is performed on past records of rainfall observations to identify the statistical
properties of the growth-decay value for mesh cells under various conditions. The
procedure given above for calculating residual growth-decay patterns is applied to an
example storm, with the distribution of growth-decay values tallied for various
combinations of RA and RB.
The distributions of growth-decay rates for values of RA greater than or equal to 5mm
can be approximately modeled as Weibull distributions or as lognormal distributions.
The parameters for each distribution (Table 3-2) can be conveniently modeled as
functions of RA. In considering the location parameter for each distribution, a growthdecay value less than –RA would lead to negative resultant rainfall strength for that
particular mesh cell which is unacceptable, and as such the location parameter can be
set to –RA, which is the logical lower boundary for the distribution. Shape and scale
parameters are found by performing regression for observed values of γ and α, and σ
and m, for Weibull and lognormal distributions respectively.
41
Probabilistic Distributed Rainfall Forecasting
Table 3-2: Parameterization of the lognormal and Weibull distribution
Parameter
Location
Lognormal
θ
Weibull
μ
Shape
σ
γ
Scale
m
α
Note
Shifts the distribution relative to the
standard distribution. In the case of
the
Weibull
and
lognormal
distributions, defines the location of
the lower boundary. Set at –RA.
Defines the shape of the distribution.
Modeled as a function of RA.
Stretches the distribution in relation to
the associated standard distribution.
Modeled as a function of RA.
Radar-observed rainfall data from a storm commencing 11/9/2000 was used for the
statistical analysis with a selection of the resulting distributions given in Figure 3-9. A
visual inspection of results suggest that the resulting distributions can be approximated
using either lognormal or Weibull distributions. It must be noted that while low
Kolmogorov-Smirnov test scores were achieved for all distributions, the scores were not
low enough to confirm that the growth-decay observations were likely to have been
sampled from lognormal or Weibull distributions. For the purpose of stochastic
generation of growth-decay values it is considered that either of these distribution types
provide a suitable representation of the growth-decay distributions. The distributions of
growth-decay values for RA of less than 5mm/hr can not be suitably modeled by either
lognormal or Weibull distributions, so values of the cumulative distribution function of
growth-decay values for each RA are tabulated (Table 3-3) rather than fitted to a
particular distribution. Furthermore, to differentiate between growth-decay values at
mesh cells when surrounding areas are completely dry, and when some surrounding
areas are experiencing rainfall, distributions for RA = 0 mm/hr and RB = 0 mm/hr, and RA
= 0 mm/hr and RB ≥ 1mm/hr, respectively, are tabulated separately (Table 3-4). The
distribution for the case RA = 0 mm/hr and RB = 0 mm/hr as shown in Figure 3-9 is very
heavily dominated by growth-decay values of 0mm/hr/5-min as there is often no rainfall
activity in the vicinity of the target mesh cells being considered, and thus growth-decay
seldom occurs. It is for this reason that the distinction between RB = 0 mm/hr and RB ≥
1mm/hr must be considered.
The location, scale and shape parameters for both the lognormal and Weibull
distributions can be modeled as functions of RA for values of RA ≥ 5mm/hr. The
42
Probabilistic Distributed Rainfall Forecasting
variation with RA of the scale and shape parameters fitted to the observed growth-decay
distributions are given for the lognormal distribution in Figure 3-10, and the Weibull
distribution in Figure 3-11. Lines of best fit are calculated through regression analysis
and where necessary through a Genetic Programming search based on the results for
5mm/hr ≤ RA ≤ 60mm/hr. Distributions for RA ≥ 60mm/hr are not considered in the
regression as the fitted parameters for these distributions are less reliable due to the low
number of observations that are available for these very high rainfall strengths. However,
the results in Figure 3-10 and Figure 3-11 suggest that the observed parameter trends
can be extrapolated for higher values of RA. The functions for the location, scale and
shape parameters identified are given in Table 3-5. Thus the stochastic characteristics of
the growth-decay dynamics of rainfall fields can be conveniently described at the mesh
cell level through the use of only three functions.
43
Probabilistic Distributed Rainfall Forecasting
1.2
0.4
Observed Data
1
RA = 0mm
0.3
RA = 5mm
0.8
0.25
0.6
P
P
Observed Data
Weibull distribution fit
Lognormal distribution fit
0.35
0.2
0.15
0.4
0.1
0.2
0.05
0
0
2
4
6
Growth-Decay Rate (mm/hr/5-min)
8
0
-10
10
0.2
0
5
10
15
20
Growth-Decay Rate (mm/hr/5-min)
25
30
0.12
0.18
0.16
Observed Data
Weibull distribution fit
Lognormal distribution fit
0.1
Observed Data
Weibull distribution fit
Lognormal distribution fit
RA = 10mm
0.08
RA = 15mm
0.14
0.12
P
0.1
P
-5
0.06
0.08
0.04
0.06
0.04
0.02
0.02
0
-10
-5
0
5
10
15
20
Growth-Decay Rate (mm/hr/5-min)
25
0
-20
30
9
0
10
Growth-Decay Rate (mm/hr/5-min)
20
30
7
Observed Data
Weibull distribution fit
Lognormal distribution fit
8
7
Observed Data
Weibull distribution fit
Lognormal distribution fit
6
5
6
RA = 20mm
RA = 30mm
P (10^-2)
P (10^-2)
-10
5
4
3
4
3
2
2
1
1
0
-20
-10
0
10
Growth-Decay Rate (mm/hr/5-min)
20
0
-30
30
4.5
30
40
3.5
3
RA = 40mm
3.5
Observed Data
Weibull distribution fit
Lognormal distribution fit
3
RA = 50mm
4
P (10^-2)
P (10^-2)
-10
0
10
20
Growth-Decay Rate (mm/hr/5-min)
4.5
Observed Data
Weibull distribution fit
Lognormal distribution fit
4
2.5
2
1.5
2.5
2
1.5
1
1
0.5
0.5
0
-40
-20
-30
-20
-10
0
10
20
30
Growth-Decay Rate (mm/hr/5-min)
40
0
-50
50
-30
-10
10
30
Growth-Decay Rate (mm/hr/5-min)
50
Figure 3-9: Distributions of observed growth-decay rate frequencies for various
values of RA
44
Probabilistic Distributed Rainfall Forecasting
Table 3-3: Cumulative probabilities for growth-decay rates for values of 1mm/hr ≤
RA < 5mm/hr
RA
ε
-4
-3
-2
-1
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
1
2
3
4
0.146
0.693
0.893
0.976
0.993
0.997
0.999
0.999
0.999
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
1.000
0.057
0.142
0.736
0.857
0.948
0.982
0.991
0.996
0.997
0.998
0.999
0.999
0.999
0.999
1.000
1.000
1.000
1.000
1.000
0.027
0.070
0.234
0.705
0.826
0.921
0.972
0.983
0.990
0.995
0.996
0.997
0.998
0.998
0.999
0.999
0.999
1.000
1.000
1.000
0.004
0.015
0.144
0.286
0.686
0.805
0.920
0.959
0.977
0.988
0.992
0.995
0.997
0.998
0.998
0.999
0.999
0.999
0.999
0.999
1.000
Table 3-4: Cumulative probabilities for growth-decay rates for values of RA =
0mm/hr
RB
ε
0
1
2
3
4
5
6
7
8
9
0
≥1
0.951
0.976
0.993
1.000
1.000
1.000
1.000
1.000
1.000
1.000
0.529
0.652
0.884
0.981
0.989
0.994
0.999
0.999
0.999
1.000
45
Probabilistic Distributed Rainfall Forecasting
4
80
Observed
Best fit
60
3
50
2.5
Shape
Scale
70
Observed
Best fit
3.5
40
2
1.5
30
20
1
10
0.5
0
0
0
10
20
30
40
50
RA (mm/hr)
60
70
80
0
10
20
30
40
50
60
70
80
RA (mm/hr)
Figure 3-10: Variation of (a) scale and (b) shape parameters with RA for lognormal
distribution
80
4
70
3.5
3
60
Observed
Best fit
Observed
Best fit
2.5
Shape
Scale
50
40
30
2
1.5
20
1
10
0.5
0
0
10
20
30
40
50
60
70
0
80
0
RA (mm/hr)
10
20
30
40
50
60
70
80
RA (mm/hr)
Figure 3-11: Variation of (a) scale and (b) shape parameters with RA for Weibull
distribution
Table 3-5: Distribution parameters as functions of RA, for RA ≥ 5mm/hr
Param.
Scale
Shape
Lognormal
m = -0.0016RA2 + 0.871RA + 0.873
log2.5 1.43
2
5.0 2.0RA
9.0
Location θ = -RA
Weibull
α = -0.0023RA2 + 1.06RA +
0.838
γ = 0.409ln(RA) + 1.73
μ = -RA
3.5.2. Estimating spatial correlation
In addition to modeling translation dynamics of a rain field at the regional scale and
growth-decay dynamics at the mesh cell scale, it is also necessary to consider the
relationship that exists on the intermesh scale. For this reason a framework for modeling
spatial correlation is required.
Spatial correlation can be assessed based on Moran’s I, a weighted product-moment
correlation coefficient.
46
Probabilistic Distributed Rainfall Forecasting
N N , j i
I
N
i 1
w zz
ij i
j 1
N
j
3-18
S0 z
2
i
i 1
Here N equals the number of mesh cells, wij is a weight denoting the proximity of the
mesh cells i and j, zi and zj are values separated by a geographic distance, and S0 is the
sum of the weights:
N N ,i j
S0
i 1
w
3-19
ij
j 1
Moran’s I is used to judge whether mesh cells in close proximity to each other are more
similar than would be expected under spatial randomness. Values of I larger than 0
indicate positive spatial correlation and values smaller than 0 indicate negative spatial
correlation.
The expectation of I under the null hypothesis H0, that values are spatially independent,
is given by:
1
3-20
E(I h ) E i
N 1
The expectation approaches zero as N increases.
Equation 3-18 can be modified to express the correlation between values separated by a
given number of mesh cells defined by class h, with h=1 representing neighboring mesh
cells sharing an edge or a diagonal corner, class h=2 represents all pairs of mesh cells
that have one cell lying between them, and so on.
N N , j i
I(h )
N
i 1
zz
j 1
i
j
3-21
N
z
i 1
2
i
Here the weights are set to unity since each value pair is separated by approximately the
same distance. This representation allows for the calculation of a correlogram through
calculation of the I statistic for a variety of different spatial lags.
The I(h) series for the residual growth-decay field shown in Figure 3-8(b) is given in
Figure 3-12. A time series of I(1) and I(2) is charted for the period 11/9/2000 15:00 ~
21:00 in Figure 3-13, which shows that the spatial correlation characteristics remain
stable for the 6-hour period.
47
Probabilistic Distributed Rainfall Forecasting
1
Spatial correlation I(h )
0.8
0.6
0.4
0.2
0
-0.2
1
2
3
4
5
6
7
8
9
10
-0.4
-0.6
-0.8
-1
Separation distance h
Figure 3-12: Series of I(h) for residual growth-decay field (11/9/2000 21:00)
I(1)
I(2)
1
Correlation
0.8
0.6
0.4
0.2
0
15:00
16:00
17:00
18:00
19:00
20:00
21:00
Time
Figure 3-13: Time series of I(1) and I(2) for residual growth-decay fields for
11/9/2000 15:00 ~ 21:00 (No radar observation available for 18:55)
3.5.3. Conditional generation of spatially-correlated noise
In conducting a Monte Carlo simulation, it becomes necessary to be able to generate a
field of spatially-correlated noise for use in sampling from distributions of growthdecay values. The following method is used for generating a noise field with spatial
structure:
1. Generate an ordinary white noise field with no spatial correlation
2. Calculate the field’s spatial correlation
3. Randomly swap any two values
4. Recalculate the spatial correlation
48
Probabilistic Distributed Rainfall Forecasting
5. If the spatial correlation shows improvement then accept the swap, otherwise
reverse it.
6. Repeat steps 3 - 5 until the desired spatial correlation is reached.
This method is computationally expensive, and as such it becomes necessary to prepare
a number of white noise fields of varying spatial correlation prior to running a real-time
Monte Carlo simulation, so as to avoid delaying the simulation. An example of a
spatially correlated white noise field with first order spatial correlation I(1) = 0.85 is
given in Figure 3-20(a).
3.6. Radar observation error
As rainfall is the primary driving input for hydrological models, radar observation errors
often lead to significant errors in the simulated hydrographs. Radar observation errors
can be analyzed and modeled separately as a spatially and temporally correlated
stochastic process. However, radar rainfall observation residual noise is not modeled
separately in the proposed Monte Carlo simulation due to the use of a filtering method
in the probabilistic flood forecasting system proposed in this research. The filter is used
to estimate and correct modeled runoff error during the period up until the point in time
when the forecast is made, and to predict future errors that may arise during the forecast
period. Through sequential comparison of modeled runoff with observed runoff, biases
in the simulated and forecasted runoff rates that result from errors in the rainfall
observations made during the pre-forecast period are reduced. In the same way, the
uncertainty in the runoff forecast due to rainfall observation errors is estimated together
with the uncertainty arising due to limitations of the hydrological model and the choice
of model parameters. As the corrections made to the hydrological model outputs are
made only based on runoff rates observed during the pre-forecasting period, the
uncertainties in forecasted runoff arising from residual noise in the rainfall forecast due
to growth-decay dynamics are unaccounted for by the filter, necessitating the separate
stochastic model for the rainfall forecasting process.
3.7. Monte Carlo simulation
The motivation behind analyzing the translation and growth-decay rate characteristics of
past storm events is to provide the necessary knowledge for stochastically generating
realistic time series of rainfall scenarios for use in a Monte Carlo simulation to aid in
real-time probabilistic forecasting of rainfall-runoff conditions in a target watershed.
49
Probabilistic Distributed Rainfall Forecasting
In designing a Monte Carlo simulation, it is important to first consider whether or not
the stochastic characteristics identified for historical and recently observed rainfall
fields can be used when modeling future rainfall. From inspection of the time series of
translation vector parameters it is found that:
ACF’s and CCF’s for the various series have similar characteristics for all storm
events up to the first lag, with correlation dropping to insignificant levels from the
second lag onwards, indicating that the type and structure of the ARIMA model
used is consistent during and between storms.
The variance and covariance values which define the white noise characteristics for
each time series show some variation between storms. The variation is considerably
less within individual storms. For the Monte Carlo simulation the assumption is
made that the characteristics of the time series process can be considered invariable
over a short-term period of several hours.
As discussed in Section 3.5.2, the spatial correlation characteristics of the growthdecay term can be assumed stable over short periods.
With the above considerations in mind, the Monte Carlo simulation for probabilistically
forecasting rainfall is designed as the three-stage process outlined in Figure 3-14.
Off-line analysis period: If the statistical model (Section 3.5) for growth-decay is to
be used, the growth-decay dynamics of rainfall events in the target region are
analyzed off-line in a preliminary analysis stage. The equations describing the scale
and shape of the distributions used for modeling the stochastic characteristics of
growth-decay dynamics for RA ≥ 5mm/hr are determined during this stage, along
with the cumulative probability tables for RA ≤ 5mm/hr.
Observation period: A period of τobs 5-minute time steps spanning t = -τobs through t
= 0 (present) is used for making rainfall observations and calculating ARMA
parameters for describing translation and rotation dynamics of the current rainfall.
An ARMA model for describing growth-decay is also fitted if using the time series
model for growth-decay as described in Section 3.4. It is assumed that the
translation, rotation and growth-decay dynamics of the rainfall fields are stable over
the observation stage and the subsequent simulation stage. Additionally, the spatial
correlation of the residual growth-decay fields is calculated for each time step
during the observation period and averaged. Spatial correlation characteristics are
assumed to remain stable over the observation and subsequent simulation stages.
Simulation period: A simulation is carried out where n sets of rainfall time series
50
Probabilistic Distributed Rainfall Forecasting
are stochastically generated. Each set is generated through the following process
i.
Commence simulation s = 1 from t = 0 based on observed rainfall pattern for
t = 0.
ii.
Generate ci parameters for time step t according to ARMA model based on
parameters from previous time step(s).
iii.
Translate rainfall pattern for five-minute period spanning time t and t+1
according to ci parameters generated in step ii.
iv.
Generate growth-decay values for each mesh cell in the translated rainfall
pattern. When using a time series model of growth-decay this is achieved by
generating parameters c7 ~ c9 according to the fitted ARMA model, and
applying the resulting parameters to the translated rainfall field. When using
a statistical model of growth-decay this is achieved by calculating scale,
shape and location parameters for the chosen distribution type (Weibull or
lognormal) based on the RA and RB values at each mesh cell. A spatially
correlated white noise field is generated such that a seed value of the range 0
< p ≤ 1 is obtained for each mesh cell. Each random value of p is used to
sample a growth-decay value from the probability distribution function
associated with the RA and RB values of that mesh cell. The procedure for
conditional generation of spatially-correlated noise described in Section 3.5.3
v.
vi.
is followed, with the exception that the spatial correlation is calculated based
on the resulting sampled growth-decay values, rather than the values of p.
The procedure iterates until a field of growth-decay values of suitably high
spatial correlation is achieved, at which point these values are added to their
corresponding values of RA.
Update time step to t = t + 1. If t < τsim then repeat procedure for new time
step t by returning to step 3 above.
If s = n then simulation is complete. Otherwise update the counter s = s + 1
and return to step 2 to commence simulation for next rainfall time series set.
51
Probabilistic Distributed Rainfall Forecasting
OFF-LINE
Event 1
Event 2
REAL-TIME
…
Analysis
● Collect historical rainfall data
● Fit G-D distributions
● Determine m and σ functions
● Measure average spatial
correlation of G-D noise
t = -τobs
t = τsim
t=0
Observation
● Observe rainfall
● Estimate ARMA parameters
● Calculate average spatial
correlation
Simulation
● Generate n rain time series
- Generate c1~c6 parameters
- Translation and rotation
- Generate G-D noise using
c7~c9 or statistical model
Figure 3-14: Three-stage process for stochastic rainfall generation
3.8. Application
An application of the proposed probabilistic distributed rainfall forecasting model is
presented for a major rainfall event that occurred within an approximately 240km
(34°40’ - 36°40’N) by 240km (135°00’ - 138°00’ E) region in the vicinity of the Nagara
River during 11th – 12th September, 2000. A region much larger than that required to
cover the Nagara River basin is necessary so as to observe rain patterns hours in
advance of their arrival at the basin. An observation period of τobs = 6 hours (11/9 15:00
~ 21:00) and a simulation period of τsim = 6 hours (11/9 21:00 ~ 12/9 03:00) are chosen
for this example.
Parallel translation is used for modeling horizontal translation dynamics in this example,
and an ARIMA(0,1,1) model is fitted for the c3 and c6 parameters based on the
identified parameters from the observation period. The MA parameter matrix and the
white noise covariance matrix are given below.
0
-0.392
1
-0.956
0
1.63 0
0 2.91
The rainfall field observed at t = 0 is given in Figure 3-15. Simulated time series of c3
and c6, used to describe the translation of the rainfall field, are given in Figure 3-16.
52
Probabilistic Distributed Rainfall Forecasting
A simulation is carried out using the time series model for generating growth-decay
parameters as described in Section 3.4. An AR(2) model with zero mean is fitted to the
differenced series {Yt} and the AR parameter matrices and the white noise covariance
matrix are given below.
-0.784 0.0466 -0.000907
1 0.0508 -0.506 0.000791
16.9
4.22
-0.791
-0.487 -0.121 -0.000667
2 -0.210 -0.534 -0.00127
22.6
20.7
-0.288
0.00195 0.000193 -0.124
0.000193 0.00137 -0.173
-0.124
-0.173
44.4
The simulated rainfall fields for this simulation for t = 1, 6, 12 and 72 are given in
Figure 3-18 and Figure 3-19 showing a weakening rainfall field moving to the North.
A second simulation is carried out using the statistical analysis approach for modeling
growth decay as described in Section 3.5. In this simulation the m and σ functions from
Table 3-5 are used for describing the growth-decay distributions. The average value of
I(1) for the observation period is calculated as 0.84 (refer to Figure 3-13), and this value
is used in simulating growth-decay fields in the Monte Carlo simulation with a tolerance
of ± 0.5.
An example white noise field generated for the first 5-minute interval of the first
simulation run is given in Figure 3-20(a). The corresponding simulated growth-decay
field is given in Figure 3-20(b) and the correlogram describing the field’s spatial
correlation characteristics is shown in Figure 3-23 to closely resemble the correlogram
calculated based on observed data for the previous time step, as required. The simulated
rainfall fields for t = 1, 6, 12 and 72 are given in Figure 3-21 and Figure 3-22, showing
the rainfall field breaking up and weakening with time and moving steadily to the
North-East for the majority of the simulation period.
53
Probabilistic Distributed Rainfall Forecasting
0
20
40
60
80
100 120
Observed rainfall (mm/hr)
6
-10
4
-12
2
c6 (km/hr)
c3 (km/hr)
Figure 3-15: Observed rainfall field at 11/9/2000 21:00 (t = 0)
0
-2
-16
-18
-4
-6
21:00
-14
22:00
23:00
0:00
1:00
Time (hr:min)
2:00
-20
21:00
3:00
22:00
23:00
0:00
1:00
Time (hr:min)
Figure 3-16: Simulated time series of parameters (a) c3, and (b) c6
54
2:00
3:00
0.2
0.25
0.15
0.2
0.1
c8 (mm/hr/hr/km)
c7 (mm/hr/hr/km)
Probabilistic Distributed Rainfall Forecasting
0.05
0
-0.05
-0.1
0.15
0.1
0.05
0
-0.05
-0.15
-0.2
21:00
22:00
23:00
0:00
1:00
Time (hr:min)
2:00
3:00
0:00
1:00
Time (hr:min)
2:00
3:00
-0.1
21:00
22:00
23:00
0:00
1:00
Time (hr:min)
2:00
3:00
20
c9 (mm/hr/hr)
10
0
-10
-20
-30
-40
21:00
22:00
23:00
Figure 3-17: Simulated time series of parameters (a) c7, (b) c8, and (c) c9
0
20
40
60
80
100 120
0
Simulated rainfall (mm/hr)
20
40
60
80
100 120
Simulated rainfall (mm/hr)
Figure 3-18: Simulated rainfall fields, 11/9/2000, (a) 21:05 (t = 1), (b) 21:30 (t = 6)
55
Probabilistic Distributed Rainfall Forecasting
0
20
40
60
80
0
100 120
20
40
60
80
100 120
Simulated rainfall (mm/hr)
Simulated rainfall (mm/hr)
0
0
40
40
South <-- North (km)
South <-- North (km)
Figure 3-19: Simulated rainfall fields, 11/9/2000, (a) 22:00 (t = 12), (b) 03:00 (t = 72)
80
120
160
200
0
80
120
160
200
40
80
120
160
200
0
West --> East (km)
0.0
0.2
0.4
0.6
0.8
40
80
120
160
200
West --> East (km)
1.0
-45 -30 -15
Spatially correlated white noise
0
15
30
Simulated growth-decay (mm/hr/5min)
Figure 3-20: Simulated results, 21:05: (a) white noise field, (b) growth-decay field
56
Probabilistic Distributed Rainfall Forecasting
0
20
40
60
80
100 120
0
Simulated rainfall (mm/hr)
20
40
60
80
100 120
Simulated rainfall (mm/hr)
Figure 3-21: Simulated rainfall fields, 11/9/2000, (a) 21:05 (t = 1), (b) 21:30 (t = 6)
0
20
40
60
80
100 120
0
Simulated rainfall (mm/hr)
20
40
60
80
100 120
Simulated rainfall (mm/hr)
Figure 3-22: Simulated rainfall fields, 11/9/2000, (a) 22:00 (t = 12), (b) 03:00 (t = 72)
57
Probabilistic Distributed Rainfall Forecasting
1
Spatial correlation I(h )
0.8
0.6
0.4
0.2
0
-0.2
1
2
3
4
5
6
7
8
9
10
-0.4
-0.6
-0.8
-1
Separation distance h
Figure 3-23: Series of I(h) for simulated growth-decay field (11/9/2000 21:05)
3.9. Conclusion
A methodology for analyzing the short-term dynamics of rainfall fields has been
presented together with a procedure for stochastically generating future rainfall fields
based on a Monte Carlo simulation. Time series analysis was applied to a translation
vector model to describe and model the horizontal movement of rainfall fields, and time
series and statistical models were developed for stochastically generating growth-decay
fields.
A multivariate autoregressive integrated time series model is developed for modeling
translation and rotation phenomenon of rainfall fields, and two univariate ARIMA time
series models are used for modeling the case where only parallel translation of rainfall
fields is considered. The time series models perform well during the simulation period,
producing realistic translation vectors that could reasonably be expected to occur
considering recently observed rainfall phenomena.
Applications were carried out for both the time series model and the statistical model
for generating growth-decay patterns for rainfall fields. The time series model approach
is convenient and easy to use, and effectively models the range of growth-decay
phenomenon that may be experienced for the rainfall field as a whole. A limitation to
this approach is that the growth-decay noise at the mesh cell scale is not modeled,
however this does not limit the applicability of the approach for use in probabilistically
forecasting discharge conditions.
58
Probabilistic Distributed Rainfall Forecasting
The statistical model approach alternatively seeks to simulate rainfall growth-decay
dynamics at the mesh cell scale, which adequately considers growth-decay dynamics at
the mesh cell scale. Realistic simulations of 5-minute growth-decay fields are achieved
with similar spatial correlation characteristics to observed growth-decay fields. An
important finding is that the stochastic properties of rainfall growth-decay dynamics in
the region considered could be described by as few as three functions during periods of
medium to heavy rainfall. Simulations longer than one hour (12 time steps) tend to
produce dispersed rainfall fields with rainfall gradually spreading across the modeled
region, which limits the applicability of the statistical model for use with only very short
term rainfall and discharge forecasts.
59
Adaptive Updating of a Distributed Rainfall-Runoff Model
4.
ADAPTIVE UPDATING OF A DISTRIBUTED RAINFALL-RUNOFF
MODEL
In order to facilitate the real-time updating of the calculated discharge given by the
distributed rainfall-runoff model used for this research, such that an accurate real-time
discharge prediction can be achieved, a scheme is developed here for utilizing observed
discharge data available in real-time from discharge observation stations within the
watershed. The rainfall-runoff model relies on the correct prior identification of model
structure and parameters and the accuracy of the rainfall input to ensure a meaningful
model output. It is clear, however, that no matter how accurately model parameters are
calibrated, the uniqueness of each hydrological event, and the inherent weakness of the
model as a simplified representation of a physical reality, ensures that an error between
model output and actual discharge will always be present.
A number of studies (Kitanidis and Bras, 1980; Puente and Bras, 1987) have
successfully used discharge observations to improve flood forecast accuracy through
application of the state-space Kalman filter (Kalman, 1960) to the problem of real-time
adaptive estimation of lumped rainfall-runoff model parameters.
The problem of updating a distributed rainfall-runoff model in real-time to reflect actual
river discharge conditions poses two main challenges. The first challenge is that of how
to combine a filtering algorithm with a kinematic wave-based model. Secondly, how can
an entire watershed model be suitably updated using discharge observations available at
only a limited number of locations? The above two issues are addressed here, and a
scheme suitable for a distributed rainfall-runoff model such as Hydro-BEAM is
proposed.
4.1. Overview of methodology
It is desired that real-time discharge observations available at a limited number of
locations (observation points) within the watershed can be used together with a
distributed rainfall-runoff model to improve the ability of the model to forecast future
discharge rates. The method employed must be capable of improving the model’s ability
to forecast discharge at each point within a watershed while restricting the forecast
calculation time to an acceptably short period so as not to render the system unusable in
real-time forecasting.
60
Adaptive Updating of a Distributed Rainfall-Runoff Model
Shiiba et al. (2000) developed a deterministic flood routing model based on the
dynamic wave flood routing model, coupled with a simplified variation of the Kalman
filter which approximates the error covariance matrix using a reduced rank square-root
algorithm. The application of the model to a 4000m one-channel reach was investigated
with an emphasis on reducing calculation time, however there is a need for further
research on extension of the model before it can be used in channel networks.
Ideally, the deterministic kinematic wave model, which forms the basis of the
distributed rainfall-runoff model used in this study, and like the dynamic wave model is
based on the Saint-Venant equations, could be converted to a stochastic model through
the introduction of noise terms to reflect the inaccuracies in the model. However, even
with the simplifications made by Shiiba, et al. (2000) to reduce the calculation time of
the error covariance matrix, it is clear that the calculation time required for the
application of the Kalman filter to such a stochastic model makes its real-time use at
every grid point along a channel network prohibitive.
The approach investigated here involves the use of discharge observations at a limited
number of observation points in a watershed to update the state of the rainfall-runoff
model’s surface and subsurface discharge, with no changes made to the model
parameters. Recursive updating of discharge levels over the entire watershed prior to a
forecast is used to bring the amount and position of water in the physical model to
closely resemble observed discharge rates. It is reasoned that a combination of the
natural lag between rainfall input and runoff output, otherwise referred to as a
watershed’s response time, together with continued adaptive updating based on
extrapolated filter parameters, will allow a forecast of considerable time length to be
made.
An algorithm for performing recursive updating of gain parameters at each of the
watershed’s observation points is developed together with two schemes for using the
weighted sums of each of these gains to update the discharge of other mesh cells within
the watershed.
4.2. Adaptive updating algorithm
Adaptive updating must be applied to every major water volume within the watershed to
ensure that all areas that contribute flow to the river channels are adjusted to achieve an
61
Adaptive Updating of a Distributed Rainfall-Runoff Model
improvement in the model’s representation of the watershed’s runoff dynamics and the
discharge forecast.
The proposed updating method recognizes that a difference exists between actual
discharge at time t, Qt, for a given location, and the modeled discharge Qmod.t:
4-1
Qt Qmod .t t
where t is a general noise term, which accounts for model and input errors.
The updating method is based on the calculation of a time variable updating factor or
gain for each mesh cell within the watershed, for each time step where discharge
observations are available. This parameter is used as a multiplier to adjust the discharge
rate of each water body within the corresponding mesh cell as follows:
4-2
Qˆt t|t 1Qmod .t|t 1
where Qmod .t|t 1 is model discharge output at a given time step and Qˆ t is the updated
model discharge for the same time step.
Depending on the water body being updated, the quantity Qmod takes on a different
physical meaning. Updating is applied to channel discharge, surface flow, and where
applicable layer A discharge.
In the case of a mesh cell containing a river channel, and a number of different land use
types, the quantity Qmod is updated separately for each of these mesh cell components.
The scheme for a channel cross-section is depicted in Figure 4-1(a).
Urbanized areas and non-river water bodies are treated as having a surface flow that
eventually contributes to the river channel flow, and no contributing sub-surface flow.
Both of these cases can be considered in a similar fashion to the cells containing a river
channel, in that the updating factor is applied to the surface flow only.
Forest and field regions are modeled such that the flow in the uppermost subsurface
layer, layer A, is assumed to eventually contribute to the flow in downstream river
channels, together with surface flow. These flows are treated as a combined flow when
being updated:
4-3
Qmod Qmod .S Qmod . A
where the subscripts S and A refer to the surface and subsurface layer A respectively,
remembering that subsurface layer A must be filled before surface flow can occur. The
62
Adaptive Updating of a Distributed Rainfall-Runoff Model
updating scheme for surface flow and layer A flow in forest and field regions is depicted
in Figure 4-1(b).
Qmod.t|t =
φt* Qmod.t|t-1
Qmod.t|t-1
Figure 4-1: (a) Channel updating model (left), and (b) surface and layer A runoff
updating model (right)
A method for time variable parameter estimation presented in Young (1984) is used for
the real-time estimation of the time-variable gain. A similar method has been used
previously by Lees et al. (1994) for the Dumfries flood forecasting system. The
procedure is considered here for the real-time updating of the state of a distributed
rainfall-runoff model.
Recursive filtering of a time-variable gain parameter t* is performed for each model
mesh cell containing a river discharge observation station. Here * is used to denote a
gain parameter calculated at a mesh cell containing an observation station, and is
used to indicate an updating factor applied to a mesh cell of any description within a
watershed. In this algorithm t* depends on the gain at the previous time step t*1 , and a
function of the prediction error (Qt Qˆt ) , where Qt and Qˆ t are the observed discharge at
time t and the predicted discharge for time t respectively.
A predictor-corrector algorithm is employed for the recursive estimation of the gain
parameter.
Prediction:
ˆ* *
t |t 1
t 1
4-4
Pt|t 1 Pt 1 C NVR
Correction:
63
Adaptive Updating of a Distributed Rainfall-Runoff Model
ˆt*|t 1
*
t
Pt|t 1Qˆ t Qt ˆt*|t 1Qˆ t
1 Pt|t 1Qˆ t2
4-5
2
Pt|t 1Qˆ t
Pt Pt|t 1
1 Pt|t 1Qˆ t2
Here CNVR is a noise variance ratio (NVR), and is used together with P to control the
degree to which the time-variable gain is allowed to change between steps, with filter
memory decreasing for increasing values of CNVR. A simplifying a priori assumption is
made that the variation of the gains calculated at each observation station are not
correlated, and thus the updating algorithm is used as a single input single output
(SISO) transfer function model to separately estimate the gain at each observation point.
The predictor-corrector equations are applied to the model in real-time prior to the
commencement of a forecast as shown in Figure 4-2. Note that the final equation shown
in the corrector step in Figure 4-2 uses t , which is calculated individually for each
mesh cell in the watershed as a function of all of the updated t* . It is used to update the
model output Qmod .t|t 1 for each water body within the watershed at time t to Qmod .t .
Predict
Precipitation
ˆt*|t 1 t*1
Observation Rainfall-runoff
model loop
Pt|t 1 Pt 1 CNVR
Qˆ t
Qˆ t Qmod .t|t 1
Correct
Unit
Delay
ˆt*|t 1
*
t
Pt|t 1Qˆ t Qt ˆt*|t 1Qˆt
1 Pt|t 1Qˆ t2
2
Qt
Pt|t 1Qˆ t
Pt Pt|t 1
1 Pt |t 1Qˆ t2
Qmod .t t Qmod .t |t 1
Figure 4-2: Recursive filtering algorithm for estimation of adaptive gain parameter
and updating of a distributed rainfall-runoff model’s discharge
4.3. Prediction and error estimation
As the objective of this research is to provide a forecast of future distributed flood
64
Adaptive Updating of a Distributed Rainfall-Runoff Model
conditions, it is important that the recursive filtering method discussed above is capable
of improving the modeled runoff rates at future time steps, and not just those time steps
where observation data is available. This is achieved primarily by the action of the filter
bringing the distributed state of the model to a condition that approximates observed
conditions, and secondarily by allowing the filter to continue running for the forecast
period under the assumption that runoff observations are approximately equal to model
outputs during the prediction period:
4-6
Q Qˆ
t
t
In this way, the value of t* slowly converges towards unity, at which point the filter
ceases to influence the predicted value. This is a reasonable assumption considering that
the model error is correlated for a small number of time steps. The rate of convergence
is controlled in the filter by the value chosen for CNVR, which can be set differently for
the prediction period as required. Under the above assumption, t* is updated in the
correction step of the filter as follows:
Pt|t 1Qˆ t2 1 ˆt*|t 1
*
*
ˆ
4-7
t t|t 1
1 P Qˆ 2
t |t 1
t
An advantage associated with recursive parameter estimation is that prediction limits for
the forecast can be estimated based on recursive estimation of the forecast error
variance (Beven, 2000). Lees et al. (1994) used the algorithm to describe the discharge
forecast in probabilistic terms. The variance of the n-step-ahead forecast error
t n (Qt n Qˆ t n ) is estimated as:
4-8
var n ˆ t2 1 pt nQˆ t2n
where ˆ t2 is the current forecast error variance estimated recursively using
ˆ t2 ˆ t21 pt et2 ˆ t21
et
Qt Qˆ t
1 p Qˆ 2
t
4-9
t
where et is the scaled forecast error. Only the error Qt Qˆt at the current time can be
known, however the predictor-corrector equations can be used to extrapolate estimates
of pt and t* to time t+n. Here pt is a recursively computed scalar gain.
While this procedure may be capable of providing an estimate of the uncertainty due to
modeling errors in the forecast at observation points, no real-time observations of
discharge are available for the remaining mesh cells within the watershed model,
65
Adaptive Updating of a Distributed Rainfall-Runoff Model
making it difficult to estimate the uncertainty in the forecast due to model errors at nonobservation point mesh cells. It would be incorrect to use the weighting system used for
distributed updating introduced below, as this would provide an overconfident forecast
since it would be based on the results at the observation points, where the potential for
reduction in model error due to updating is the greatest. The variance of the predicted
discharge error at a given non-observation point mesh cell is likely to range between the
value estimated for a nearby observation point and the value that can be achieved for
Hydro-BEAM without the adaptive updating scheme.
It can be seen that this type of adaptive updating algorithm addresses errors due to
hydrologic uncertainty, but does not take into account precipitation uncertainty, as the
error variance is recursively estimated using discharge observations prior to the
commencement of the rainfall forecast. This is convenient in that the algorithm can be
used to complement the probabilistic distributed rainfall forecast described in Chapter 3,
which considers precipitation uncertainty, to provide a complete probabilistic forecast
considering both types of uncertainty.
4.4. Distributed updating for an entire watershed
A limitation of the range of adaptive updating or filtering methods presently used in
river discharge forecasting is that while they are effective in improving forecast
accuracy at locations where real-time observations of discharge are available, they
cannot be used to improve forecasts at other locations in a watershed. It is of no
practical purpose to update the modeled discharge rates at only a limited number of
locations in a watershed while ignoring other locations, when using a distributed
rainfall-runoff model. The problem of updating a watershed based on real-time
observations from a limited number of locations will now be discussed.
The approach taken here involves using the gain parameters calculated at each
observation point as the basis for calculating an updating factor for other mesh cells
within the distributed rainfall-runoff model. A method for updating every mesh cell
within a watershed is considered in this section, with a modified approach presented in
Section 4.5 for updating only those mesh cells within close proximity of observation
points.
66
Adaptive Updating of a Distributed Rainfall-Runoff Model
4.4.1. Definitions
The mesh cells of the flow routing map created for the target watershed are categorized
here based on their geographical relationship to a watershed’s discharge observation
stations, to aid in creating a systematic method for updating the distributed rainfallrunoff model used for this research. The definitions outlined in Table 4-1 are used below
to describe the distributed updating scheme, and Figure 4-3 demonstrates the result of
applying each definition to the Nagara River flow routing map.
Table 4-1: Watershed mesh cell categorization
Category
Mesh cell
Path cell
Junction
Observation point
Cell category
Mesh cell
Path cell
Junction
Observation point
Definition
Any cell lying within the target watershed.
Any mesh cell that forms a part of the observation path.
Any path cell at a confluence or terminal position in the
observation path, or that contains a discharge observation
station.
Any junction that contains a discharge observation
station.
Color
Figure 4-3: Basin mesh cell categories applied to the Nagara River watershed
67
Adaptive Updating of a Distributed Rainfall-Runoff Model
In Table 4-1 the observation path refers to the collection of mesh cells that are
observation points or lie downstream of an observation point. It is evident that each
definition also includes the attributes of each of the definitions that lie above it in the
table. For example, an observation point is also a junction, a path cell, and a mesh cell.
4.4.2. Gain calculation for non-observation point mesh cells
An updating factor for each of the n mesh cells in the target watershed is calculated
as a weighted sum of each of the m observation point gain parameters i* as follows:
m
4-10
ii*
i 1
where i represents the weight applied to the ith observation point’s gain parameter * ,
i
m is the number of observation points in the watershed, and with the condition that:
m
4-11
i 1
i 1
In vector notation the above equation can be rewritten as:
αφ*T
4-12
where α 1 , 2 , , m for a given mesh cell, and φ*T is the transpose of the vector
of observation point gain parameters.
Thus a set of m i ’s can be calculated for each mesh cell within the target watershed
prior to running the rainfall-runoff model, expressing the relationship between each
mesh cell and each observation point. In this way, updating factors for each mesh cell
can be readily calculated in real-time during a typhoon event as a linear function of the
updating factors at each of the observation points.
Two methods for the calculation of the updating factor weights are presented here. The
simpler of the two methods is based on inverse difference weighting interpolation, with
distance calculated based on the number of steps that must be traversed along river
channels. A second method is proposed as an attempt to take into account certain
properties of a watershed, which the inverse difference weighting technique cannot
account for.
4.4.3. Updating factor calculation – inverse distance weighting interpolation
Inverse distance weighting lends itself to the problem of calculating a set of distributed
68
Adaptive Updating of a Distributed Rainfall-Runoff Model
weight factors for the real-time updating of a distributed rainfall-runoff model. The
weighting function is based on inverse power:
1
4-13
w(d ) p , p 0
d
where d represents distance and p is specified by the user.
A variation of the inverse distance weighting interpolation technique was introduced by
Shepard (1968), and along with the Thiessen polygon spatial interpolation technique
(Thiessen, 1911), is often used in hydrology for estimating distributed hydrological
variables from point observations, such as interpolating precipitation fields using
information from an array of rain gauges.
In order to determine the set of distributed weight vectors for model updating, the
method is modified such that d refers to the distance along the river channel network,
measured in terms of mesh cells using the target watershed’s flow routing map. Also,
the weights for a given mesh cell are chosen such that their sum equals unity.
The weights for a given mesh cell are calculated as follows:
1
d ip
i
4-14
m 1
j 1 d p
j
with di being the distance measured in mesh cells that must be traversed along the river
channel network to reach observation point i, and with a suitable choice for p being 2.
4.4.4. Updating factor calculation – linear variation method
The following method is proposed such that mesh cell updating factors vary smoothly
between adjacent connected mesh cells, and that the updating factors calculated for path
cells are a function of the updating factors for the junctions located directly upstream
and downstream. This is done in an attempt to limit the influence of observation points
not directly located upstream or downstream from a mesh cell. It should be noted
however that this influence cannot be completed removed due to the necessity of having
the updating factors vary smoothly along channels and between adjacent connected
mesh cells.
Step 1 – Calculation of the weight vectors for the observation points
69
Adaptive Updating of a Distributed Rainfall-Runoff Model
The observation points are numbered 1 to m in no particular order, and the weight
vector α 1 , 2 , , m determined for each observation point. The m weights for
each observation point j are simply set as follows:
1, i j
4-15
i
0, i j
Step 2 - Calculation of the weight vectors for the remaining junctions
The weight vectors for the remaining junctions are then calculated, proceeding upstream
to downstream. For each remaining junction the p neighboring upstream junctions
(where an observation point is also considered a junction) for each upstream channel
branch are used for determining the weight vector, together with the closest downstream
observation point. Here ‘neighboring’ will be used to indicate a mesh cell of the same
type which is connected upstream or downstream via a path of mesh cells such that the
connecting path contains no other cells of that type. The rationale behind the calculation
of the updating factor here is that the value of the updating factor is first calculated
based on a linear variation between upstream junction k and the downstream
observation point, ignoring the presence of the other p-1 upstream junctions. This is
performed p times for each of the upstream junctions and then the average is taken, such
that the updating factor is of the form:
p
d
(
)
k 1 USJ .k USJd.k DSO d USJ .k
4-16
USJ .k
DSO
p
where dUSJ.k represents the distance counted in number of mesh cells along a channel
from the junction to upstream junction k, dDSO represents the distance from junction to
the neighboring downstream observation point, and USJ .k and DSO represent the
updating factor of the upstream junction k and the neighboring downstream observation
point, respectively. Through expansion the weight vector can be calculated as:
dUSJ .k
p
k 1
dUSJ .k d DSO
4-17
α j
α
DSO
p
where α j and α DSO refer to the weight vectors of upstream junctions and the weight
vector of the neighboring downstream observation point, respectively.
dUSJ .k
1
dUSJ .k d DSO
p
α k 1
p
70
Adaptive Updating of a Distributed Rainfall-Runoff Model
A special case occurs when the furthest downstream mesh cell, located at the basin
mouth, is not an observation point. According to the definitions given in Section 4.4.1,
the mesh cell at the basin mouth is a junction as it lies downstream of an observation
point, therefore making it a path cell, and it is also located at an end point of the
observation path, qualifying it as a junction. In this case, the weight vector for this
junction is calculated immediately following completion of step one above, and is the
average of the weight vectors of the p upstream neighboring observation points:
α
p
αUSO.k
4-18
p
where the subscript USO.k refers to the kth neighboring upstream observation point. In
calculating the remaining junctions, the basin mouth mesh cell can be used as an
observation point in Equation 4-16 and Equation 4-17 in the case where no downstream
observation point exists.
k 1
Step 3 - Calculation of the weight vectors for the remaining path cells
The weight vectors for the remaining path cells are simply calculated such that the
updating factor varies linearly between junctions:
d
4-19
USJ USJ DSJ USJ
dUSJ d DSJ
where the subscripts USJ and DSJ refer to the neighboring upstream and downstream
junctions respectively, recalling that an observation points are also junctions. Through
expansion the weight vector is calculated as:
dUSJ
α 1
dUSJ d DSJ
dUSJ
αUSJ
dUSJ d DSJ
α DSJ
4-20
Step 4 - Calculation of the weight vectors for the remaining mesh cells
The remaining mesh cells are assigned a weight vector equal to the weight vector of the
neighboring downstream path cell:
α α DSOPC
4-21
where the subscript DSOPC refers to the neighboring downstream path cell.
An example of the weight distribution for the Nagara River watershed, Gifu, Japan,
using observation points at Inari, Shimohorado, Mino, and Chusetsu is given in Figure
4-4. Each figure gives an indication of the relative influence that the gain parameter
71
Adaptive Updating of a Distributed Rainfall-Runoff Model
calculated for a given observation point will have on the estimated updating factor for
each mesh cell within the watershed.
0.0
(a)
(b)
(c)
(d)
0.5
i
1.0
Figure 4-4: Influence of observation points on each mesh cell of the Nagara River
watershed: (a) Inari, 1 , (b) Shimohorado, 2 , (c) Mino, 3 , (d) Chusetsu, 4
72
Adaptive Updating of a Distributed Rainfall-Runoff Model
4.5. Partial distributed updating
An alternative to the distributed updating approach introduced in Section 4.4 is
considered here for watersheds where only a very limited number of observation points
are available. In such cases the extrapolation of gain parameters across large distances
may be undesirable, and an alternative that allows only a portion of the watershed to be
updated becomes preferable.
The following approach is adapted from Madsen et al. (2005) whereby three types of
functions (constant, triangular, mixed exponential) were introduced for determining the
influence of observations on adjacent locations along a river. In considering that the
degree of the influence of a gain value calculated for an observation point is limited to
adjacent locations along a river with influence decreasing with distance, an alternative
exponential function (Sekii et al., 2005) is used in this research to spatially extrapolate
the values of * to adjacent river locations.
In this approach, the mesh cell categorization is simplified to include only the three
types given in Table 4-2.
Table 4-2: Mesh cell types for partial distributed updating
Type
Type 1
Type 2
Type 3
Definition
Mesh cells that contain observation stations.
Mesh cells located between upstream and downstream
observation stations.
Mesh cells that are neither of type 1 or type 2.
The calculation of for each mesh cell is as follows.
Type 1 mesh cells
The value of for type 1 cells is defined as being equal to the gain calculated for that
cell using the predictor-corrector algorithm given in Section 4.2.
Type 2 mesh cells
The value of for type 2 cells is calculated as
73
Adaptive Updating of a Distributed Rainfall-Runoff Model
t 1.0 t*us 1.0 e
up
t*ds 1.0 edown
4-22
where
d us
up
d us d ds
2
d ds
d us d ds
4-23
2
down
and tus and tds are the gains at the neighboring upstream and downstream observation
points respectively, and dus and dds are the distances from the target type 2 mesh cell to
the neighboring upstream and downstream observation points respectively, calculated in
terms of the number of river mesh cells separating the locations. α is a parameter which
influences the degree and distance to which gain values at observation points influence
the gain calculated for surrounding mesh cells. In setting α, Equation 4-24 must be
satisfied for every type 2 mesh cell in the watershed. This ensures that the influence of
the upstream and downstream gain values has a combined weight of no more than unity.
4-24
e up edown 1.0
Type 3 mesh cells
The value of for type 3 cells is defined as
t 1.0 tneighbor 1.0 e
2
d neighbor
4-25
where dneighbor is the distance to the neighboring type 1 or type 2 mesh cell calculated in
terms of the number of mesh cells that water must flow through to travel to or from that
mesh cell, and tneighbor is the gain at that neighboring cell. β is a parameter which has a
similar role to α, and must be set such that for all type 3 mesh cells:
d2
4-26
e neighbor 1.0
4.6. Application
An application is conducted for the Nagara River watershed. Real-time discharge
observations are currently made available at Mino, Akutami and Chusetsu. In the
application presented here, observations at Mino and Chusetsu are used for updating,
with discharge observations at Akutami reserved for validation of the distributed
updating scheme.
Due to the limited number of observation stations available, and the absence of an
observation station in the upstream region, the partial distributed updating scheme
74
Adaptive Updating of a Distributed Rainfall-Runoff Model
introduced in Section 4.5 is used. The parameters given in Table 4-3 are used for each
application, and the three storm events given in Table 4-4 are considered. Figure 4-5
shows the influence at Akutami of the adaptive updating technique based on
observations at Mino and Chusetsu which are located at distances of approximately
17km upstream and 8km downstream respectively. Despite the highly-accurate HydroBEAM results, for nearly all time steps the updated discharge shows an improvement
over the model calculated discharge results for Event 1. Figure 4-6 and Figure 4-7 show
the results at Chusetsu when using the adaptive updating technique for prediction with
Event 2 and Event 3 respectively. An improvement due to the adaptive updating scheme
can be seen for the 1-hour ahead prediction in Figure 4-6 with the influence of the filter
only minimal for the 2-hour ahead prediction, and negligible for the 3-hour ahead
prediction. Conversely, the results for Event 3 show a substantial improvement for all
three lead times. These results can be explained by considering that the influence of the
predictor-corrector algorithm is in proportion to the error series observed up to the
commencement of the prediction, and decays to zero during the prediction period. For
most of the duration of Event 2 including the period prior to 16:00 and the period
following 21:00 there is only a small relative error between observed and calculated
discharge and as such the gain variable remains close to 1.0 for these periods and is
slow to respond to the sudden increase in error observed at 17:00 through 19:00. In
Event 3, the adaptive updater is continually compensating for a large calculation error,
and as such the gain parameter for the location of Chusetsu and Mino remains above 1.0
for the duration of the event and is slow to recede to 1.0 during each 3-hour prediction
period.
A drawback associated with hydrological model filtering systems that calculate model
error as being based on the difference between calculated and observed runoff is that the
assumption is made that the modeling error is due to the flood wave being too large or
too small, rather than considering that it could be temporally misaligned, having been
delayed or having passed through the watershed too quickly. It can be seen that in Event
3 the response of Hydro-BEAM to the rainfall input appears to be delayed. The adaptive
updating procedure attempts to correct the low discharge rate observed at Mino and
Chusetsu by increasing the discharge rates in the surrounding regions, which leads to
the predicted hydrographs overshooting the observed hydrograph at a later stage. This
highlights the value of using a hydrological model that gives the correct temporal
response to rainfall inputs.
75
Adaptive Updating of a Distributed Rainfall-Runoff Model
Table 4-3: Updating parameters
Parameters
Optimized value
5.0×10-7
5.0×10-5
6
0.01
CNVR
CNVR (prediction)
α
β
Table 4-4: Storm events used in application
Event
Event 1
Event 2
Event 3
Storm term
10~12/9/2000
18~20/6/2001
14~16/9/2001
Max discharge (Chusetsu)
5041.0 (t/s)
1096.0 (t/s)
510.0 (t/s)
6000
0
10
20
30
4000
40
3000
50
60
2000
70
Rainfall
Observed discharge
Calculated discharge
Updated discharge
1000
0
80
90
100
9:00
11/9/2000
12:00
15:00
18:00
21:00
0:00
Time
Figure 4-5: Updating results for Akutami (Event 1)
76
3:00
Rainfall (mm/hr)
Discharge (m3/s)
5000
Adaptive Updating of a Distributed Rainfall-Runoff Model
1400
0
10
1200
20
30
Rainfall
800
40
Observed discharge
Calculated discharge
50
1-hr ahead predicted discharge
600
60
2-hr ahead predicted discharge
3-hr ahead predicted discharge
400
Rainfall (mm/hr)
Discharge (m3/s)
1000
70
80
200
90
0
100
7:00
19/6/2001
10:00
13:00
16:00
19:00
Time
22:00
1:00
Figure 4-6: Prediction results for Chusetsu (Event 2)
800
0
10
700
20
Rainfall
500
400
Observed discharge
30
Calculated discharge
40
1-hr ahead predicted discharge
2-hr ahead predicted discharge
50
3-hr ahead predicted discharge
60
300
70
200
80
100
90
0
11:00
15/9/2001
100
14:00
17:00
20:00
Time
23:00
2:00
5:00
Figure 4-7: Prediction results for Chusetsu (Event 3)
77
Rainfall (mm/hr)
Discharge (m3/s)
600
Adaptive Updating of a Distributed Rainfall-Runoff Model
4.7. Conclusion
An adaptive updating scheme has been proposed for use with a distributed rainfallrunoff model. Due to the large computational effort that would be required to run a
traditional filtering scheme, such as the widely-used Kalman filter, for each mesh cell
within a watershed, an alternative that can feasibly be used in real-time that updates a
watershed model’s discharge based on discharge observations available at a limited
number of locations has been explored.
Two schemes for distributing the influence of the adaptive updating scheme from
observation stations to other areas within a watershed have been proposed, and
applications for three storm events have been carried out to demonstrate updating of the
downstream region of the Nagara River watershed. Results of the application for
prediction over a 3-hour lead time show that in nearly all cases the updated discharge is
of higher or similar accuracy when compared with the non-updated discharge provided
by Hydro-BEAM. The updating scheme has also been shown to effectively update mesh
cells within close proximity of observation stations, as demonstrated for the location of
Akutami where available observation data was used for verification only. The inclusion
of observations from Akutami would further increase the utility of the adaptive updating
scheme. When using the partial distributed updating scheme, depending on the size of
the watershed, the locations and number of available observation stations, and the
values chosen for α and β, the influence of the filter may not necessarily extend to all
regions of the watershed. In the case of the Nagara River watershed, as the majority of
residents live in downstream regions close to Mino, Akutami and Chusetsu, this is not
considered a limitation.
78
AI-based Error Correction for Distributed Rainfall-Runoff Models
5.
AI-BASED
ERROR
MODELING
CORRECTION
FOR
RAINFALL-RUNOFF
Assumptions associated with the model structure and errors associated with observed
rainfall and the physical structure of the river basin being modeled, can lead to errors in
the simulated and predicted runoff rate outputs from the model. Furthermore, it is
recognized through numerous attempts to calibrate the Hydro-BEAM model used in this
research, that there exists no one optimal set of model parameters that can adequately
model hydrological dynamics for every type of rainfall event that may be encountered.
For this reason, it is desirable to be able to recognize and decrease the model error in
real time through a process of comparing recent model outputs with discharge
observations at those locations within the river basin where such information is
available on a real-time basis.
An artificial intelligence based approach to error correction of outputs from distributed
rainfall-runoff models is considered here. Unlike the real-time adaptive updating
approach presented in the previous chapter, which seeks to improve the state of the
model through continuously correcting the state of an entire river basin through a
feedback process based on runoff observations, the alternative AI-driven approach
works through predicting the model error based on the model performance over recent
time steps. These predicted errors are added to the simulated model discharge rates to
give a discharge prediction for each location within the river basin where real-time
discharge observations are available. These discharge predictions can then be
interpolated and extrapolated across the river basin based on an understanding of spatial
and temporal relationships between the hydrographs at each watershed location, as will
be discussed in the next chapter.
5.1. Procedure of AI-based error correction approach
The procedure of the proposed error correction method used for locations in a river
basin where real-time discharge observation data is available is illustrated in Figure 5-1.
The time series of observed and modeled discharge rates to the present, and future
discharge rates modeled using forecasted rainfall are used as the inputs to the system.
The input data are passed through a self-organizing map (SOM) which has been trained
to group input data into clusters based on data similarity. The SOM determines which
cluster the input data belongs to, and passes the data to a genetic programming (GP)
79
AI-based Error Correction for Distributed Rainfall-Runoff Models
function specifically chosen for modeling data displaying the characteristics represented
by that particular cluster. The GP function is used to map the observed and modeled
runoff rate inputs to an estimate of the discharge rate at the specified lead time. Where
forecasts for multiple lead times are required, multiple GP functions must be provided
for each cluster. Only one SOM needs to be built providing that the same choice of
input variables are used for all lead times. An artificial neural network (ANN) can be
used together with or in place of the GP function.
Observed
Observed
rainfall
rainfall
Observed
runoff
Forecasted
Forecasted
rainfall
rainfall
Hydro-BEAM
GP1
Modeled
runoff
GP2
Genetic
programming
function
GPn
NN1
Forecasted
discharge
NN2
Self-organizing map
(cluster analysis)
NNn
Feedforward
neural network
model
Figure 5-1: Schematic of proposed AI-based discharge forecasting approach for
river basin locations with real-time discharge observation data
5.2. Genetic programming for error correction
Genetic programming (GP) is a machine learning technique based on Darwin’s theory
of natural selection that employs symbolic regression to search for a solution to a given
problem. GP belongs to a class of evolutionary algorithm methodologies which also
includes Genetic algorithms, evolutionary strategies, classifier systems, and
80
AI-based Error Correction for Distributed Rainfall-Runoff Models
evolutionary programming. Evolutionary algorithms share the common approach of
randomly generating an initial population of solutions, assessing the fitness of each
solution using a predefined objective function, and applying genetic operators to the
‘fittest’ solutions to replace the existing population with a new population. This
evolutionary process of breeding and assessing new populations of solutions is repeated
such that the population as a whole becomes stronger until a satisfactory solution is
found.
A benefit of using GP is that unlike other black-box techniques such as the artificial
neural network and support vector machine, it offers a readily-understandable
transparent solution. As this solution takes the form of a function, often some hint can
be obtained as to the underlying dynamic processes. Additionally, in searching for
solutions, the user can assist in the GP search process by giving more weight to any
operators, variables, constants or combinations of the three that are thought to be
important to the solution, thus directing the evolution of the population in the right
direction.
A handful of applications of GP to flood forecasting have been reported to date. Babovic
and Bojkov (2001) applied GP, together with a time-lag recurrent neural network and a
Kohen self-organzing map to the task of predicting short-term runoff from various
hydrometeorological observations. Through a combination of these three techniques,
prediction accuracy superior to naïve prediction could be achieved under certain limited
conditions.
Whigham and Crapper (2001) used a daily time series of rainfall-runoff observations
together with GP to discover relationships suitable for describing rainfall-runoff
dynamics in two watersheds. Results using GP were found to be equivalent to those for
a calibrated deterministic lumped parameter model during periods when rainfall and
runoff were correlated. When such correlation was weak, it wad found that GP had an
advantage as the procedure did not assume any underlying physical processes.
A study was conducted by Liong et al. (2002) applying GP to the problem of
determining the relationship between future runoff and recently observed rainfall and
runoff data, at the outlet of the Upper Bukit Timah watershed in Singapore. It was
concluded that the functional relationships determined using GP could be used to give a
short-term forecast superior to the naïve persistence forecasting technique.
81
AI-based Error Correction for Distributed Rainfall-Runoff Models
Each of the above studies focused on using GP to discover the relationship between
input hydrometeorological variables and future runoff conditions, however the
evolutionary process struggled to discover all the required knowledge to sufficiently
model the full range of rainfall-runoff phenomenon.
5.2.1. Genetic programming calculation procedure
GP uses parse tree structures to describe individual candidate solutions, as they allow
for convenient description, calculation and manipulation of functions. A parse tree is a
structure whose nodes are comprised of operators, variables and constants. In a tree
structure, a node consisting of a function which accepts arguments (consisting of
combinations of operators, variables and constants) is referred to as a branch of the tree,
and a node consisting of a variable or constant and thus accepting no arguments is a
terminal node and is referred to as a leaf of the tree, as demonstrated in Figure 5-2. The
set of operators used within a tree structure may include arithmetic operators (+, -, /)
and mathematical functions (log, sin), and for more complex problems may be extended
to include logical operators (IF, ELSE), iterative procedures (LOOP-UNTIL), and userdefined functions. Input variables and constants that are considered to be relevant to the
phenomenon being modeled can be predefined as candidate tree components.
root node
/
+
branch node
a
(a+b)/2
2
leaf node
b
Figure 5-2: Parse tree representation
An initial population of individuals is generated at the start of a GP run. The number of
individuals is predefined based on user experience, and individuals are generated
randomly from a set of candidate operators, variables and constants (both predefined
and random). Often a limit to the maximum allowed complexity (number of branches,
depth of tree structure) of functions is also defined.
Following the creation of each new generation, the fitness of each individual in the
population is calculated to determine which will be used to create the next generation,
and which will be expelled from the population. An objective function is used to
measure the ability of each individual to correctly map input vectors to associated target
82
AI-based Error Correction for Distributed Rainfall-Runoff Models
outputs, with the fitness of each individual determined based on all data points in the
training data set. This accuracy can be specified using one or more appropriate measures,
such as the root mean square error or average absolute error.
In order to evolve the population, new solutions are generated from fit individuals
through a process of crossover and mutation. In crossover, two new offspring solutions
are generated from two parent solutions through exchange of genetic material. A single
node from each parent tree is chosen randomly, and the node together with the entire
branch below it is swapped with the other parent. Mutation allows the addition of new
characteristics to the population, through randomly replacing a node in an individual
solution with another element, with the restriction that the new element must take the
same number of arguments as the old element (i.e. an addition operator which takes two
arguments can not be replaced by a variable x that accepts zero arguments). The
concepts of crossover and mutation are demonstrated in Figure 5-3 and Figure 5-4,
respectively.
A GP run proceeds as follows:
1. Randomly generate an initial population of n solutions.
2. Test each solution in the population against the objective function to determine
fitness levels. Solutions that best solve the problem being modeled are assigned the
highest fitness levels.
3. Select the fittest m solutions to be passed to the next generation, and to act as
parents for the new solutions.
4. Perform crossover on random combinations of parents to generate n-m new trees to
complete the new population. Alternatively, perform mutation on one individual
remaining from the previous generation to produce a new offspring.
5. Repeat steps 2 through 4 until either i) a suitably accurate solution is generated, or
ii) the maximum calculation time / number of allowed generations is reached.
A flowchart describing this process is given in Figure 5-5.
83
AI-based Error Correction for Distributed Rainfall-Runoff Models
×
/
+
a
√
-
2
b
c
a
0.5
Parent 1: (a+b)/2
Parent 2: (c-a)×√0.5
/
×
√
+
a
b
-
2
c
0.5
Child 1: (a+b)/√0.5
a
Child 2: (c-a)×2
Figure 5-3: Crossover
/
/
2
+
a
2
-
b
a
Parent: (a+b)/2
b
Child: (a-b)/2
Figure 5-4: Mutation
START
Randomly generate initial population
Evaluate fitness of each individual
Test
stopping
criteria
Yes
STOP
No
Remove least fit individuals
and promote surviving individuals
to next generation
Crossover
Select 2 individuals
Select
genetic
operator
Mutation
Select 1 individual
Perform crossover
Perform mutation
Add 2 new children to population
Add 1 new child to population
Yes
Enough
individuals?
No
Figure 5-5: GP procedure flowchart
84
AI-based Error Correction for Distributed Rainfall-Runoff Models
5.3. Feedforward artificial neural network for error correction
An artificial neural network (ANN) is a mathematical model used for data processing
inspired by the bioelectrical networks in the brain comprised of neurons and synapses.
In an ANN, simple processing elements referred to as neurons are used to create
networks that are capable of learning to model complex systems. For an introduction to
the structure and design of Artificial Neural Networks the reader is referred to Hagan et
al. (1996).
A number of studies into the application of ANN in the field of rainfall-runoff modeling
and flood forecasting have been carried out (Karunanithi et al., 1994; Lorrai and Sechi,
1995; Campolo et al., 1999). Hsu et al. (1995) compared ANN models with traditional
black box models, concluding that an ANN model is capable of giving superior
performance over a linear ARMAX (autoregressive moving average with exogenous
inputs) time series approach, when observed time series of flow rate and rainfall are
used as input. In general, ANN have been found to perform well in predicting shortterm flood stage for flood events closely resembling in magnitude previous flood events
used for training the networks. ANN models, however, tend to perform poorly during
extreme events, and Elshorbagy and Simonovic (2000) warn against using ANN models
as the sole runoff prediction strategy. Also, it is difficult to determine the optimal ANN
architecture for a given watershed, and in most cases, a trial-and-error approach is still
used.
As an alternative to the genetic programming strategy introduced above, an ANN can be
considered for use in forecasting the error between the outputs of a physical rainfallrunoff model and the observed runoff rates. A feedforward neural network has been
used for this purpose by Smith et al. (2004) and was found to provide similar accuracy
to GP. An advantage of GP is that it is easier to use than an ANN approach in that it
uses a function in the forecasting stage rather than a complicated network of neurons.
Furthermore, as a function can be easily understood by simple inspection, in many cases
it might offer clues about the dynamics of the phenomena being explored – in this case
the relationship between the observations, model outputs and error time series.
5.4. Self-organizing map for data clustering
Self-organizing maps (SOM) are considered here for their ability to classify input
85
AI-based Error Correction for Distributed Rainfall-Runoff Models
vectors into groups based on their similarity. The advantage of this is that a separate
regression model can be tailor-made for each group as an alternative to a one-size-fitsall global model.
SOM were developed by Kohonen (2001) and are also referred to as self-organizing
feature maps or Kohonen maps, and are a variation on the competitive neural network.
An SOM can be taught through a process of unsupervised learning to map input vector
data onto regions of a grid such that similar vectors are grouped together. Furthermore,
as the resulting map transforms multi-dimensional input vectors into one or twodimensional space, an SOM can also be used as a data visualization technique.
The SOM used in this research is formed from a 2-dimensional rectangular grid of
neurons. Each neuron is initialized with a random n-dimensional weight, with the value
of each of the weight’s components taking on a value between zero and one.
A training set of input vectors are prepared using past observations and runs of the
Hydro-BEAM model. The components of these input vectors are scaled to range
between zero and one. Each input vector is passed through the map one at a time. The
neurons in the map compete to see which has the weight with the smallest Euclidean
distance to the input vector. The winning neuron i* and the neurons within close
proximity are then updated to become more similar to the input vector according to the
Kohonen rule.
w i q w i q 1 p q w i q 1
1 w i q 1 p q
i N i* d
5-1
Here the neighborhood Ni*(d) refers to the all the neurons that lie within a radius d of
the neuron i*, p(q) is the current input vector, wi(q-1) and wi(q) are the previous and
updated values respectively of the weight associated with neuron i, and α is a learning
rate which controls the degree to which weights are modified. Figure 5-6 illustrates the
basic structure of a SOM.
This process is repeated with all training input vectors passing through the network
numerous times, and the weights associated with each neuron come to resemble those of
other neurons in close proximity. As the learning process proceeds the value of d
gradually decreases to reduce the range of influence of a winning neuron. Once the
learning stage is completed the map can then be used to sort input data into clusters
based on similarity. Input data vectors with similar properties become associated with
86
AI-based Error Correction for Distributed Rainfall-Runoff Models
neurons that are in close proximity to each other on the map. All training data are passed
through the map after the learning process is completed and are sorted into clusters
based on the region of the map that they become associated with. New data vectors can
also be classified as belonging to a cluster in the same way.
Figure 5-6: Basic structure of a self-organizing map
The decision as to the number of clusters to use and the decision as to which neurons
should be grouped into which clusters can be rather subjective in the case of the SOM
used here for separating training data into groups for GP model identification.
Following the learning stage, a tally of the number of training data associated with each
neuron on the map can be made and the results plotted. A visual inspection of the
clustering of the data will often reveal groups of neurons that have a large number of
data vectors associated with them, separated by neurons that have very few. Clusters can
be chosen such that they are centered on these groups of strong neurons.
5.5. Application
A case study is undertaken here which demonstrates the use of GP and SOM with the
distributed rainfall-runoff model Hydro-BEAM to predict future runoff conditions for
the Nagara River watershed. The use of the distributed rainfall-runoff model allows
knowledge of physical processes in the watershed to be incorporated into the solution,
leaving GP and SOM to focus on uncovering the less-understood prediction error
structure.
87
AI-based Error Correction for Distributed Rainfall-Runoff Models
Radar-observed rainfall patterns are used as input for Hydro-BEAM for both the
observation period prior to when the prediction is made and for the prediction period
spanning between time zero and the designated lead-time. This in effect removes
interference from rainfall forecast errors. The effects of these errors on the prediction
ability of the overall flood forecast system are considered separately in a Monte Carlo
simulation of distributed rainfall conditions which is used to provide the rainfall
forecast.
5.5.1. Problem formulation
The distributed rainfall-runoff model Hydro-BEAM is used together with observed and
predicted rainfall patterns to predict runoff conditions for up to 6-hours ahead for the
Nagara River watershed located in Gifu, Japan. At locations where real-time runoff
observations are available, the accuracy of past model predictions are compared with
runoff observations and these comparisons are used to estimate prediction error. The
estimated prediction errors can then be added to the current model predictions to give an
improved prediction.
In this application the inputs to GP are selected from among the following:
The past observed runoff rates at the location of interest for the current time step
and up to 5 previous hourly time steps, Qo-5 ~ Qo0.
The model-calculated runoff rates for the current time step, the 5 previous hourly
time steps, and for each time step up to the lead time for which the prediction is
required, Qc-5 ~ Qcn.
Where available, the observed runoff rates at (upstream) locations i = 1, m in the
watershed for time steps t = -5 ~ 0, labeled Qo,it.
The observed model errors, calculated from the time series of Qo and Qc above, for
the current and 5 previous hourly steps, E-5 ~ E0.
Three GP functions are required for each location of interest to estimate the future time
series of prediction errors E1 ~ E6.
5.5.2. Training, cross-check and verification data
A number of runs of Hydro-BEAM are performed to produce time series of modelcalculated estimates, and the observed runoff rates for the corresponding periods are
88
AI-based Error Correction for Distributed Rainfall-Runoff Models
also obtained. The resulting data set is divided into training, cross-check and
verification data sets, comprising 8, 4 and 3 runoff events, respectively. The GP search
proceeds by evolving populations and measuring their fitness based on their ability to
convert the inputs in the training set to their corresponding correct outputs.
In order to avoid overfitting, the fittest member from each generation is tested against a
cross-check data set which is prepared independently of the training data. The crosscheck data set can be used to estimate the point during evolution when overfitting
begins to occur. Overfitting occurs when the GP evolved functions begin to lose their
ability to generalize as they continue to fit closer to the specific examples presented in
the training set. This will occur at the point when the fittest GP functions from each
evolution will begin to decrease in performance when tested against the cross-check
data, despite an increasing performance in terms of the training data set.
Each GP run was performed over 30 minutes with the population in each run set to be
between 250 and 450 and the number of children produced at each generation set to be
between 400 and 1000.
5.5.3. Results
Expressions were evolved for the location of Chusetsu for 1 and 3-hour ahead lead
times. Each expression was evolved so as to be dimensionally correct, although this is
not necessarily a requirement as the functions are being evolved through an empirical
process and are not guaranteed to possess an underlying physical meaning.
After collecting like terms, the expression identified for a 1-hour ahead lead time could
be written as a linear function of the error time series:
0.614Qct
Et 1
0.909 Et 0.614 Et 1
Qct 1
5-2
A suitable expression for a 3-hour lead time was also identified; however it was found
that the iterative use of Equation 5-2 over three time steps, predicting the 1-hour ahead
error at each step, provided superior 3-hour ahead prediction performance. Tests were
also performed for 4 through 6-hour ahead predictions, with results suggesting that GP
is incapable of predicting model error for these lead times.
89
AI-based Error Correction for Distributed Rainfall-Runoff Models
The 1 and 3-hour ahead results for two rainfall events are given for Chusetsu in Figure
5-7 and Figure 5-8. A comparison of performance in terms of root mean square error is
made in Table 5-1 for the two events between the following prediction strategies:
Hydro-BEAM calculated discharge without a GP model
Hydro-BEAM calculated discharge with GP model correction
Naïve prediction, which assumes that the discharge at the target lead time will be
the same as the current observed discharge.
Table 5-1: Prediction error comparison
Event
16-17/7/2001
16-17/7/2001
14-16/9/2001
14-16/9/2001
Lead time
1-hour
3-hour
1-hour
3-hour
RMSE Calc.
106.6
106.6
87.0
87.0
RMSE GP
32.1
78.3
21.3
79.8
RMSE Naïve
42.5
111.8
29.6
82.4
Results show that the accuracy of the GP enabled prediction is superior to that of both
the raw Hydro-BEAM calculated discharge and the naïve prediction for each case.
A SOM was also developed to group training data into clusters. An example 3-hour
ahead prediction made using two separate GP models trained based on the clustered data
is shown in Figure 5-9, together with a prediction based on a GP model trained using the
entire non-clustered data set, included for comparison. Two clusters were used as only a
limited training data set was available. It can be seen from the example that data could
be divided into meaningful clusters, making distinctions between times when the
hydrograph is rising and falling, and between high and low discharge rates. Generally it
was found that the use of SOM for predicting model error in the case of this research
provided no significant advantage, and in some cases led to poorer prediction error. It is
reasoned that this is due to requiring an already limited data set to be divided into two
smaller clusters, such that each cluster does not have sufficient data for training a GP
model without suffering the effects of overfitting.
90
AI-based Error Correction for Distributed Rainfall-Runoff Models
700
Observed discharge
Calculated discharge
1-hr ahead predicted discharge
3-hr ahead predicted discharge
Discharge (m3/s)
600
500
400
300
200
100
0
9:00
15:00
16/7/2001
21:00
3:00
17/7/2001 Time
9:00
15:00
21:00
Figure 5-7: Runoff predictions for Chusetsu (16-17/7/2001)
700
Discharge (m3/s)
600
500
Observed discharge
Calculated discharge
1-hr ahead predicted discharge
3-hr ahead predicted discharge
400
300
200
100
0
22:00
4:00
14/9/2001
10:00
16:00
22:00
4:00
Time 16/9/2001
10:00
16:00
Figure 5-8: Runoff predictions for Chusetsu (14-16/9/2001)
91
AI-based Error Correction for Distributed Rainfall-Runoff Models
800
Discharge (m3/s)
700
600
Observed
GP Predicted
GP & SOM Cluster 1
GP & SOM Cluster 2
500
400
300
200
100
0
22:00 4:00
14/9/2001
10:00
16:00
22:00 4:00
16/9/2001
Time
10:00
16:00
22:00
Figure 5-9: 3-hour ahead runoff predictions for Chusetsu (14-16/9/2001)
5.6. Conclusion
The utility of using a GP-fitted expression for predicting Hydro-BEAM modeling errors
has been investigated in this chapter. It is found that Hydro-BEAM simulations of future
discharge conditions can be improved for a lead-time of up to 3-hours through the use
of expressions identified for individual locations of interest, with no prediction
performance gains over the use of the raw Hydro-BEAM calculated results for lead
times of 4-hours and longer.
The use of self-organizing maps has been considered for clustering training data to
allow for developing GP expressions tailored to various specific discharge conditions.
While SOM has shown ability to group training data into meaningful clusters based on
observed and modeled discharge conditions, data clustering did not promote
improvements in prediction accuracy of the use of a single GP model in the case of this
research. The use of SOM may be appropriate in the case where large data sets are
available.
The use of GP in this manner is restricted to locations where real-time and historical
discharge observation data are available. Chapter 6 introduces a methodology for
92
AI-based Error Correction for Distributed Rainfall-Runoff Models
extending the Hydro-BEAM and GP-based discharge predictions to other locations
within the target watershed.
93
Interpolation of Runoff Predictions for Distributed Flood Forecasting
6.
INTERPOLATION OF RUNOFF PREDICTIONS FOR DISTRIBUTED
FLOOD FORECASTING
The high spatial and temporal correlation between runoff rates at different locations in a
watershed can be taken advantage of to allow interpolation and extrapolation of runoff
rates to locations where real-time observations or predictions are currently unavailable.
Provided with runoff rates at only a handful of observation stations, interpolation and
extrapolation of runoff rates along a watershed’s rivers are achieved based on
knowledge acquired from multiple off-line precipitation-driven distributed hydrological
simulations of historical runoff events. Local linear modeling and global regression are
investigated for the analysis of spatial patterns across the watershed. This process uses
the filtered predictions made using the AI-based error correction model discussed in the
previous chapter to estimate future runoff conditions at all locations in a watershed, not
just those where runoff observations are available.
6.1. Proposed interpolation strategy
Local Linear Modeling (LLM) and Global Linear Modeling (GLM) are investigated for
their application to interpolation and extrapolation of runoff rates along river channels.
Because the interpolation system developed in this research must be used to identify
hydrological patterns for hundreds of unique combinations of watershed locations under
a variety of different hydrological conditions, it is essential to use a flexible strategy
capable of adjusting itself to each different task in real-time. Additionally, in
consideration of global climate change, it is desirable that the system as a whole can
grow and adapt to changing hydrological conditions. For these reasons, both strategies
use a database containing numerous precipitation-driven rainfall-runoff simulation
results from a distributed rainfall-runoff model calibrated to the target watershed of
interest. The simulated hourly discharge rates at each watershed location (1km spatial
resolution) stored in this database can then be accessed in real-time to recognize spatial
and temporal patterns between hydrographs at different locations in the watershed, thus
removing the need for the development of numerous pre-defined models. In this way
the most probable discharge rates at various unguaged locations in a watershed can be
estimated based on observations or predictions of discharge rates at each available
discharge observation station. The system can be automatically updated following each
new observed precipitation event simply by performing a hydrological simulation and
adding the results to the database, thus increasing the diversity of the knowledge in the
database through the inclusion of new hydrological phenomena.
94
Interpolation of Runoff Predictions for Distributed Flood Forecasting
6.2. Local linear modeling
6.2.1. Introduction
Local Linear Modeling is used here to approximate the relationship of future runoff
states at watershed locations without discharge observation stations using the filtered
predictions (and recent observations) of future runoff states at observation station
locations. This method provides an effective tool for finding an estimate or prediction
for a query vector x by fitting a parametric function in the neighborhood of x. Unlike
global models such as Artificial Neural Networks which seek to fit a single global
model to all of the training data, local models use only those training samples that are
most similar to the query vector x to obtain a locally parametric model suitable for
estimating f(x) in the vicinity of x. As linear regression is only used in the vicinity of the
query, the LLM strategy is capable of modeling solution spaces that are globally nonlinear.
A local regression model is used to approximate a relationship between the query vector
and output vector by drawing upon database simulation data and embedding it into a
suitably-determined state space. This state space is searched for the k nearest neighbors
closest to the query vector. A regression is then performed on the neighborhood, from
which an estimate of the state of the non-observation location can then be made.
Regressions of polynomial degree zero and one are respectively referred to here as
Local Averaging Models (LAM) and Local Linear Models (LLM). Regressions of
higher polynomial degree are possible, however only those of degree one are considered
here.
Atkeson et al. (1997) give the following linear model, which assumes that the constant
1 has been appended to all the input vectors x to include a constant term.
y 0 1 x1 d xd
6-1
Here i are the set of model parameters requiring identification, xi are the model inputs,
d is the dimensionality of the training data and is an error term to be minimized. The
training examples are collected in matrix X and the model parameters are collected in
matrix β .
y βX
6-2
The model is determined through estimation of the parameters i using a regression
95
Interpolation of Runoff Predictions for Distributed Flood Forecasting
which minimizes
x
i
T
i
i yi
2
6-3
through solution of the normal equations
X X β X
T
T
y
6-4
with the matrix XTX inverted for :
XTX XT y
1
6-5
6.2.2. Nearest neighbors search
An exhaustive search strategy is used to find the k nearest neighbors to the query vector,
which requires that the Euclidean distance dE between the query vector q and each data
point x in the database be calculated for every query made.
d E x, q
x
j
j
qj
6-6
x q x q
T
Efficient nearest point search algorithms are available to speed the nearest neighbor
lookup process, such as the k-d trees scheme (Bentley 1980, Moore 1991) which creates
a data structure for storing the set of training points taken from a d-dimensional space,
to allow for rapid subsequent lookup. In the case of this research, the system is designed
to be flexible to allow for changes in database size, data quality and hydrological and
climate change. The query vector has a variable form to allow for the unique
requirements of each location within a watershed and for changes in the temporal
correlation between discharge rates at spatially separated locations. For this reason and
as database search time is negligible, an efficient search algorithm is deemed
unnecessary.
An option to prevent a given regression from being dominated by data points all taken
from the same simulation is included in the system, whereby the maximum fraction of
nearest neighbors that may be chosen from a given simulation event i is restricted to be
6-7
ki 1/ a n _ sim b i 1, , n _ sim
where a and b are chosen by the user such that their sum is unity (a=0.05, b=0.95 is
used in this research) and n_sim is the number of simulations stored in the database.
Furthermore, in recognizing that some observation stations will be more important than
others in the regression stage, the elements of the query vector can be weighted during
96
Interpolation of Runoff Predictions for Distributed Flood Forecasting
the nearest neighbor search to give priority to data elements from observation stations
that have hydrographs that are highly correlated with the query location’s hydrograph.
These observation stations will often be those that are geographically closest to the
query location. One approach towards choosing appropriate weights involves using the
magnitude of the correlation vector φ 1, 2 , , m , which is a measure of how
highly correlated each query vector element is to the runoff at the target location. This
correlation can be estimated from simulated data in the database, and assumes a linear
relationship. These measures of correlation can be used to weight the elements of the
query vector when searching for nearest neighbors: the higher the value of j , the more
influence the corresponding query vector element will have in determining suitable
nearest neighbors for the regression.
This modified measure of distance between query point and data point is referred to
here as the Dimensionally Weighted Euclidean Distance (DWED).
d DWED x, q
x
j
x q
T
2
j
j
qj
6-8
φ φ x q
T
6.3. Global regression
As the number of nearest neighbors approaches n_sim the modeling approach moves
from a local modeling strategy to a global regression strategy. This global regression
approach can be considered as an extension of the local linear regression described
above, using all available simulation data in searching for a relationship between the
particular combination of locations under investigation.
6.4. Choice of query vector form
The proposed interpolation system is designed to exploit the correlation that exists
between the discharge rates at different locations within the same watershed. It is
therefore desirable to tailor the form of the query vector to suit each individual
watershed location such that it maximizes the use of available correlated data. Since
observations of discharge rates and filtered predictions of future discharge rates are
available at observation stations, data from these locations form the basis of the query
vector.
97
Interpolation of Runoff Predictions for Distributed Flood Forecasting
6.4.1. Temporal correlation between elements
An estimate of the correlation between the hydrograph of the target non-observation
point and the hydrographs from each observation station is determined.
Q Q T T
s
Q Q Q T
n
i 1
n
i 1
ts
i
ts
i
ts
t
t
i
ts 2
n
i 1
t
i
6-9
t 2
Here s is the number of time lag steps, n is the number of data points in the time series,
and Qt and Tt are the discharge rates at the observation station and target location
respectively, at time step t.
In most cases there will exist a given time lag at which the two hydrographs being
compared have the highest correlation. For example a target location’s present discharge
rate will have a higher correlation with an upstream location’s discharge rate from a
number of time steps prior, compared with its present discharge rate. In other words, the
influence of an upstream location’s discharge takes some time to be felt by downstream
locations.
In the case of using the interpolation system in a prediction scenario, the optimal time
lag for each combination of locations is chosen to be the non-positive time lag that
shows the largest correlation. In the case where the observation station is downstream of
the target location, the optimal time lag for that observation station will nearly always
be zero, since positive time lags have no relevance in a prediction scenario.
The query vector for a given target location thus takes the following form:
q t Qtt s1 , Qtt s 2 ,
, Qtt sm
6-10
where s1, s2,…, sm refer to the optimal lag of each of the m observation stations.
6.4.2. Additional elements
The inclusion of a number of additional query vector elements, which refer to other
factors related to the hydrological dynamics in the watershed, may result in an increase
in the accuracy of the interpolation method. Division of data points in the database into
groups related to the stage of the hydrograph at the time of observation is considered.
Here the hydrograph stage is simply described by one of the following four descriptors:
(low flow / rising / peak / falling). A low flow level is set for each observation station
based on hydrological records, with any discharge rate below or equal to that defined as
98
Interpolation of Runoff Predictions for Distributed Flood Forecasting
‘low flow’. Any discharge rate above this level is then grouped based on the following
rules:
If the second derivative of the discharge rate time series is negative: ‘peak’
Else, if the first derivative of the discharge rate time series is positive: ‘rising limb’
Else, if the first derivative of the discharge rate time series is negative: ‘falling
limb’
In this way, the inflection points of the hydrograph are chosen as the transition points
between rising limb, peak, and falling limb regions. This strategy of grouping data
based on hydrograph stage has a similar effect to using a self-organizing map for data
clustering.
6.5. Application
This section presents the results of an application to test the ability of the local modeling
scheme to faithfully model the temporal-spatial relationship between watershed
locations based on the distributed rainfall-runoff simulation results.
The application is conducted for two typhoon events that occurred in the vicinity of the
Nagara River watershed. The discharge observation stations used for this application
exist within the watershed at the downstream locations of Chusetsu and Akutami, and
the mid-stream locations of Mino and Shimohorado (Figure 6-1). The vast majority of
residences and facilities that require protection from flooding are also located in this
southern area of the watershed.
Hydro-BEAM calibration and database preparation are performed using simulation
results from 10 major precipitation events that occurred in 2000-2004.
99
Interpolation of Runoff Predictions for Distributed Flood Forecasting
Figure 6-1: Nagara River flow routing map and discharge observation stations
Validation of the system is performed using two additional independent runoff events
that occurred in 2003. Two scenarios are investigated here. The first scenario involves
interpolating discharge rates for a location (Mino) that has observation stations located
in both upstream (Shimohorado) and downstream (Akutami, Chusetsu) locations. The
second scenario involves extrapolation of discharge rates to a location (Shimohorado)
that has no observation stations located upstream, and three observation stations located
downstream (Mino, Akutami, Chusetsu). In each case the observed runoff at the target
location is only used for verification, and as such these locations are assumed to be
without observation stations. The observed discharge rates at the four locations for the
two events used in this application are given in Figure 6-2 and Figure 6-3.
100
Interpolation of Runoff Predictions for Distributed Flood Forecasting
1800
Observed discharge 23-28/4/2003
Chusetsu
Akutami
Mino
Shimohorado
1600
1400
Discharge (m3/s)
1200
1000
800
600
400
200
0
23/4 0:00
24/4 0:00
25/4 0:00
26/4 0:00
27/4 0:00
28/4 0:00
29/4 0:00
Date / Time
Figure 6-2: Observed discharge, Event 1: 23-28/4/2003
1600
Observed discharge 11-13/7/2003
Chusetsu
Akutami
Mino
Shimohorado
1400
Discharge (m3/s)
1200
1000
800
600
400
200
0
11/7 0:00
12/7 0:00
13/7 0:00
14/7 0:00
Date / Time
Figure 6-3: Observed discharge, Event 2: 11-13/7/2003
6.6. Results and discussion
The correlation between hydrographs in the simulation database is analyzed to
determine the optimal form of the query vectors. It is found that the discharges at the
101
Interpolation of Runoff Predictions for Distributed Flood Forecasting
two target locations are best described by functions of the following form, where
superscripts refer to hourly time lag steps and subscripts refer to location names:
QMt f QCt 2 , QAt 1 , QSt 1
Mino
Shimohorado
Q f Q , Q , Q
t
S
t 3
C
t 3
A
t 1
M
6-11
Results using local linear modeling with a small number of nearest neighbors gave
unstable results for both Mino and Shimohorado. It was found that stability and
accuracy of the interpolation and extrapolation results improved as the number of
nearest neighbors approached the number of data points in the database, equivalent to
the global regression approach. The high linear correlation between hydrographs at each
location studied also suggests that global linear regression is a valid approach.
Results using global regression for Mino are given in Figure 6-4 and Figure 6-5, and for
Shimohorado in Figure 6-6 and Figure 6-7. Table 3-1 gives the root mean square (RMS)
error and mean absolute relative (MAR) error for the integration at Mino and the
extrapolation at Shimohorado for the two events.
1600
Observed Discharge (Mino)
Global Regression
Global Regression & Optimal Lag
Global Regression & Data Division
Mino 23-28/4/2003
1400
Discharge (m3/s)
1200
1000
800
600
400
200
0
23/4 0:00
24/4 0:00
25/4 0:00
26/4 0:00
27/4 0:00
28/4 0:00
Date / Time
Figure 6-4: Interpolation for Mino, (23-28/4/2003)
102
29/4 0:00
Interpolation of Runoff Predictions for Distributed Flood Forecasting
1000
Mino 11-13/7/2003
Observed Discharge (Mino)
Global Regression
Global Regression & Optimal Lag
Global Regression & Data Division
900
800
Discharge (m3/s)
700
600
500
400
300
200
100
0
11/7 0:00
12/7 0:00
13/7 0:00
14/7 0:00
Date / Time
Figure 6-5: Interpolation for Mino, (11-13/7/2003)
700
Observed Discharge (Shimohorado)
Global Regression
Global Regression & Optimal Lag
Global Regression & Data Division
Shimohorado 23-28/4/2003
600
Discharge (m3/s)
500
400
300
200
100
0
23/4 0:00
24/4 0:00
25/4 0:00
26/4 0:00
27/4 0:00
28/4 0:00
Date / Time
Figure 6-6: Extrapolation for Shimohorado, (23-28/4/2003)
103
29/4 0:00
Interpolation of Runoff Predictions for Distributed Flood Forecasting
350
Shimohorado 11-13/7/2003
Observed Discharge (Shimohorado)
Global Regression
Global Regression & Optimal Lag
Global Regression & Data Division
300
Discharge (m3/s)
250
200
150
100
50
0
11/7 0:00
12/7 0:00
13/7 0:00
14/7 0:00
Date / Time
Figure 6-7: Extrapolation for Shimohorado, (11-13/7/2003)
Table 6-1: Global regression results for Mino and Shimohorado
Method
GRa
RMSb
c
GR / optimal lag
RMS
MAR
GR / division
RMS
MAR
MAR
Mino
Event 1: 23-28/4/2003
101
0.140
89.9
0.128
99.8
0.165
Event 2: 11-13/7/2003
23.8
0.0543 21.9
0.0532 38.0
0.0895
Shimohorado
Event 1: 23-28/4/2003
36.9
0.201
24.5
0.243
48.5
0.176
Event 2: 11-13/7/2003
25.0
0.251
21.8
0.270
26.1
0.210
a
b
c
Global regression Root mean square error (m3/s) Mean absolute relative error
Application results indicate that the global regression strategy proposed here is capable
of estimating hydrographs at distributed positions within a watershed based on
knowledge of the hydrographs at positions located at a distance. As would be expected,
hydrograph shape is estimated accurately, with rising and falling limbs, and hydrograph
peaks timed well. For the unseen events, a mean absolute relative error in magnitude of
the estimated runoff of the order of 0.05~0.15 was achieved for the two cases of
interpolation for runoff at Mino, with less accurate results for extrapolation to the
distant location of Shimohorado of the order of 0.20~0.25.
The results showed that a slight improvement in accuracy was gained for the
104
Interpolation of Runoff Predictions for Distributed Flood Forecasting
interpolation at Mino through optimization of the query vector to consider the time lags
at which the target location is optimally correlated. Division of the data points in the
database to reflect their position in a hydrograph (baseflow, rising limb, peak, falling
limb) to train separate regression models for each hydrograph stage showed mixed
results with an increase in accuracy only for the extrapolation case at Shimohorado.
These results are inconclusive regarding the benefit of employing lag optimization and
data division.
6.7. Conclusion
A strategy for interpolation and extrapolation of runoff rates across a watershed has
been introduced. Results indicate that global regression can be used to estimate the
shape, timing and magnitude of hydrographs separated from reference locations where
runoff observations or predictions are available. Further investigation is required to
determine the ability of the system to accurately extrapolate results to locations greatly
separated from observation locations.
105
Probabilistic Flood Forecasting
7.
PROBABILISTIC FLOOD FORECASTING
Combined rainfall prediction and rainfall-runoff simulation procedures for estimation of
future flood stage conditions generally attempt only to offer a best-guess estimate of
future river watershed discharge conditions without giving any information in regards to
the confidence of the forecast being made. This ignores the fact that there are a number
of sources of forecast uncertainty that exist, including rainfall measurement and
forecasting errors, and errors associated with Hydro-BEAM and its parameters.
Information about the uncertainty in forecasts, otherwise referred to as predictive
uncertainty, can be beneficial in a number of ways, especially when this uncertainty is
described in the form of a probabilistic forecast, which gives the probability distribution
of the variable being forecast. Risk-based decision-making becomes possible when
probabilistic rather than deterministic forecasts are provided, with the potential for
social and economic benefits resulting from the operation of floodgates and pumps, and
other mitigation measures, with a view to risk minimization.
Risk-based flood warning is also made possible through probabilistic flood stage
forecasting, where the probability of exceedance of design flood levels can be provided.
This has the benefit of reminding the user that a given forecast is not certain, and alerts
the user to the range of flood stage heights that could potentially be experienced. This
would help to remove the confusion during flood events that would otherwise likely
occur if a flood stage prediction were exceeded in a major flood event, leading to
damage or loss of life as a result of misguided faith in what was a ‘best’ but by no
means perfect estimate of future conditions.
For the above reasons, a framework is proposed for taking into account the uncertainty
inherent in a flood stage forecasting system. An estimate of future conditions that takes
uncertainties into account through considering probabilities is referred to in this
research as a ‘forecast’, while an estimate that ignores probabilities in inferring future
conditions is referred to as a ‘prediction’, in line with the recommendations given in
Krzysztofowicz (2001a).
7.1. Modeling uncertainty in flood forecasts
Uncertainty in watershed runoff predictions results as a consequence of an inability to
perfectly predict future rainfall conditions, and the inadequacy of the mathematical
106
Probabilistic Flood Forecasting
model used to approximate a highly complex physical system. The uncertainty related
to estimates of future rainfall conditions are referred to here as precipitation uncertainty,
and the uncertainty related to the model structure, estimated model parameters, and data
observations, is referred to as hydrologic uncertainty.
Precipitation uncertainty is generally regarded as the most influential cause of
uncertainty in a flood forecast (Moore, 2002). Ensemble or Monte Carlo simulationbased forecasts of future hydrological conditions may be used to estimate the
uncertainty in a flood stage forecast due to uncertainty in the rainfall forecast input.
Ensemble forecasts, however, cannot alone produce a complete probabilistic forecast, as
they are only capable of estimating an output distribution of model flood stage,
incorporating uncertainty in the precipitation input, while ignoring the hydrologic
uncertainty arising from all other sources of uncertainty (Krzysztofowicz, 2001b).
Additionally, an ensemble forecast often does not take into account the precipitation
measurement error, assuming that the precipitation forecast is made based on perfectly
observed climatic conditions.
One attempt at incorporating all known uncertainties in a short-term flood stage forecast
involved a Bayesian forecasting system, which determines the probability distribution
of a model flood stage, under the hypothesis that there is no hydrologic uncertainty
(Kelly and Krzysztofowicz, 2000), quantifies hydrologic uncertainty under the
hypothesis that there is no uncertainty in the precipitation input (Krzysztofowicz and
Herr, 2001), and integrates these uncertainties to produce a probabilistic flood stage
forecast (Krzysztofowicz, 2001b).
Attempts to date to produce probabilistic forecasts of flood stage have considered
rainfall as an averaged or point process using a coarse temporal resolution of the order
of one hour, and have used lumped physical models or black box models to model the
rainfall-runoff process. Examples include the precipitation uncertainty processor
developed by Kelly and Krzysztofowicz (2000) for the aforementioned Bayesian
forecasting system, which used a time series of 6-hours watershed average precipitation
amounts as input for a lumped hydrologic model, and the real-time flood forecasting
system of Lardet and Obled (1994), which uses stochastically generated hourly time
series of rainfall as a lumped input to a rainfall-runoff model. A framework for
probabilistic forecasting of discharge conditions throughout a watershed, considering
107
Probabilistic Flood Forecasting
rainfall at a fine spatial and temporal resolution, and using a distributed physicallybased rainfall-runoff model, is presented here.
The probabilistic short-term forecast of watershed flood stage conditions presented in
this research is based on a rainfall translation model and a deterministic rainfall-runoff
model. Consideration is given to the effects of uncertainty in the rainfall forecast, as
well as observational and modeling uncertainties. These hydrologic and precipitation
uncertainties are handled as follows:
A Monte Carlo simulation of rainfall conditions is used to produce an ensemble
forecast considering precipitation uncertainty.
Two independent error correction approaches are proposed to reduce the influence
of observation and model errors, and to provide an estimate of the uncertainty in the
forecast due to hydrologic uncertainty:
i.
A recursive adaptive updating technique which updates the state of the target
watershed in real-time based on runoff observations.
ii.
An AI technology-based error prediction strategy that works to reduce the
rainfall-runoff model error at locations where runoff observations are
available in real-time, and uses these corrected model rates to predict the
runoff at surrounding locations in the watershed.
7.2. Probabilistic flood forecast formulation
An effective means by which to unambiguously convey the degree of certitude in a
forecast is a predictive probability distribution function involving a numerical measure
of the degree of certitude regarding the occurrence of an event. Charts of the probability
density function (pdf), or the equivalent cumulative distribution function (cdf)
describing the probability P(Q q) of flood discharge Q being less than or equal to a
designated discharge level q, are proposed as an appropriate means of describing a flood
forecast for a given location within a watershed for each required forecast lead time.
Additionally, a convenient method of displaying results of a distributed flood forecast,
so as to provide information at a glance regarding future distributed watershed
conditions, is to provide a color-coded plot of probability of exceedance in terms of
percentage of design flood level for each location across a watershed.
If an appropriate distribution can be fitted to the ensemble forecast results, a single
aggregated forecast in pdf or cdf form can be provided for each watershed point. This is
108
Probabilistic Flood Forecasting
achieved through combining the distributions resulting from consideration of
precipitation uncertainty and hydrologic uncertainty
7.2.1. Precipitation uncertainty
A Monte Carlo simulation approach that involves the generation of numerous future
rainfall pattern series, and the input of these patterns into a deterministic rainfall-runoff
model, is proposed in Chapter 3. A translation vector model for analysis of rainfall
pattern movement is extended to include a time series analysis of observed pattern
translation to allow for stochastic generation of future rainfall patterns based on the
statistical properties of rainfall pattern translation and growth-decay characteristics.
These generated future rainfall patterns are subsequently input into a distributed
rainfall-runoff model, resulting in a distributed ensemble forecast of watershed flood
stage based on the range of possible precipitation conditions that could be experienced.
The goal of the Monte Carlo simulation is to use a stochastic rainfall generator and
hydrologic model to generate numerous realistic future rainfall-runoff events such that
an ensemble forecast of flood stage carrying a probabilistic meaning can be given.
7.2.2. Hydrologic uncertainty
In addition to improving the accuracy of the real-time flood stage forecast, the methods
proposed in this research for assimilation of observed runoff data can be used to provide
an estimate of the variance of the prediction error due to errors in measurement of
hydrological inputs and shortcomings associated with the model and its
parameterization.
An estimate of the hydrologic uncertainty can be made as outlined in Chapter 4 through
using the adaptive updating algorithm to recursively estimate the forecast error variance.
A drawback of this approach is that it is limited to locations where real-time discharge
observation data is available. An estimate of the hydrologic uncertainty is also required
for other non-observation point locations. As no observation data is available for these
locations, the assumption is made that the predictive ability of Hydro-BEAM at these
locations is at least as good as a naïve prediction whereby future discharge rates are
estimated as being the same as the currently observed discharge rate. Error distributions
can thus be determined based on Hydro-BEAM simulated hydrographs using observed
rainfall, comparing n-hour ahead discharge rates with current rates for various locations
to determine error distributions for the naïve prediction. Under the assumption that the
109
Probabilistic Flood Forecasting
error distributions are similar for runoff events of similar magnitude, these distributions
can then be used in real time to estimate the degree of uncertainty of a runoff rate
prediction for a given location and prediction lead-time. In this way a prediction of a
runoff rate can be converted to a cumulative distribution function of the range of
possible runoff rates that may eventuate under the given rainfall time series when
considering hydrological uncertainty.
Error distributions resulting from hydrologic uncertainty are assumed to be lognormally
distributed. This assumption is necessary to allow the error to be combined with the
distribution resulting from the Monte Carlo simulation for precipitation uncertainty. In
order to satisfy this assumption, adaptive updating (Chapter 4) is performed on the
logarithm of the discharge, rather than the discharge itself. This is achieved using a
simple preprocessor for converting the discharge to the lognormal scale prior to
updating
Q log Q
7-1
h log h
together with a postprocessor for converting the discharge back to a real number scale
once updating is completed:
Q eQ
7-2
h e h
Here h is the forecast error due to hydrologic uncertainty. Updating is performed on
Q , and h is treated by the adaptive updating algorithm as being normally distributed
with zero mean.
7.2.3. Combining precipitation uncertainty and hydrologic uncertainty
In order to produce a complete probabilistic forecast of future runoff conditions it is
necessary to combine the effects of both precipitation uncertainty and hydrologic
uncertainty together in the one pdf or cdf distribution. The forecast of future discharge
Q can be represented in the logarithmic scale as
Q Qp h
7-3
where Qp is a lognormally distributed variable with mean μp and variance σp2
representing discharge modeled under precipitation uncertainty, and Q p log Q p is a
normally distributed variable with mean mp and variance sp2. The logarithm of the
forecast error due to hydrologic uncertainty, h , is normally distributed with mean mh
110
Probabilistic Flood Forecasting
(assumed equal to zero) and variance sh2.
Equation 7-3 can be expressed as
Q m p s p rp mh sh rh
7-4
m p s p rp sh rh
where subscripts p and h relate to precipitation and hydrologic uncertainties respectively,
and rp and rh are independent random normal variables defined by:
E rp 0, E rp2 1
E rh 0, E rh2 1
7-5
E rp rh 0
The mean m and variance sp2 of Q can be described in terms of mp, sp2 and sh2 as
follows.
m E m p s p rp sh rh
m p s p E rp sh E rh
7-6
mp
s 2 E Q 2 E Q
2
E m p 2m p s p rp 2m p sh rh s p rp 2 s p rp sh rh sh rh
2
2
2
2
s E r
s p E rp
2
s p sh
2
2
2
2
m
2
p
7-7
2
h
h
2
Defining Q in terms of a single lognormal distribution then becomes a simple matter of
converting Q from the logarithmic scale to the real scale. The mean, variance,
skewness and kurtosis of Q are:
e
2 m p s p 2 sh 2
2
2 e
2m
s
1 e
p 2 s p
2
p
sh 2
2 e
2
2 sh 2
e 2 m
2 e s
2
p
sh 2
4 s p sh
2
2
2e3 s
2
p
p sp
sh 2
2
sh 2
7-8
1
3e 2 s
2
p
sh 2
3
111
Probabilistic Flood Forecasting
7.3. Application
An application of the probabilistic flood forecasting system is presented here. The
probabilistic rainfall forecast results for 11 September 2000 from Chapter 3, comprising
results from 100 Monte Carlo simulations of rainfall dynamics between 11 September
21:00 and 12 September 3:00 are used for the precipitation input, and the distributed
adaptive updating algorithm presented in Chapter 4 is used for assimilating real-time
discharge observations and updating the middle reach of Nagara River and surrounding
areas.
The result of the ensemble forecast considering precipitation uncertainty based on 100
6-hour simulations is given for the location of Chusetsu in Figure 7-1. It can be seen
from the ensemble that the generated rainfall input does not have a major influence on
the hydrograph at downstream locations within the Nagara River watershed for the first
2 hours of the rainfall-runoff simulation. The influence on the hydrographs of
midstream locations such as Mino and Akutami appears approximately an hour earlier.
Generated hydrographs can be converted into cumulative distribution functions at each
time step, thus describing the forecast of future discharge conditions at each point
within a watershed in probabilistic terms. The ensemble data is found to fit a lognormal
distribution function, and example cdfs are given for Chusetsu for 1 through 6-hour
ahead forecasts (Figure 7-2). As is expected, these figures suggest increasing
uncertainty in the forecasts with time, with very little uncertainty due to the
precipitation forecast present for 1 and 2-hours-ahead forecasts. Hydrologic uncertainty,
considering observation errors and modeling errors, is not considered in these figures.
112
Probabilistic Flood Forecasting
20000
18000
Discharge (m3/s)
16000
14000
12000
10000
8000
6000
4000
Observed discharge
Calculated discharge
2000
t =0
0
2000/9/11 18:00
2000/9/11 21:00
2000/9/12 0:00
2000/9/12 3:00
Date / Time
Figure 7-1: Ensemble forecast for Chusetsu made at 21:00 11 September 2000
Predictive probability P(Q<=q)
1
0.8
0.6
Lead time
1 hour
2 hours
3 hours
4 hours
5 hours
6 hours
0.4
0.2
0
4000
5000
6000
7000
8000
9000
10000
Discharge Q (m3/s)
Figure 7-2: Probabilistic forecast of discharge considering precipitation
uncertainty, 21:00 11 September 2000, Chusetsu
113
Probabilistic Flood Forecasting
7.4. Conclusion
A framework has been proposed for the production of a probabilistic forecast of future
distributed discharge conditions in a watershed. Methods for quantifying the two
sources of forecast uncertainty that affect a flood forecast, being precipitation
uncertainty and hydrologic uncertainty, have been proposed so as to provide a complete
probabilistic forecast. The system provides a forecast for a lead-time of up to 6 hours of
discharge conditions at 1km intervals along each major tributary within the midstream
region of the Nagara River watershed.
A forecast of discharge presented in both a distributed and probabilistic manner has a
considerable benefit over the traditional approach of providing best-guess predictions
for a small number of locations, as it allows the range of potential flood conditions to be
identified for all populated areas in a watershed, which is necessary for effective
planning of flood prevention and evacuation strategies. An approach for using such a
forecast for providing optimal evacuation decisions is explored in Chapter 8.
Reduction of modeling error associated with hydrologic uncertainty was made possible
during the ensemble forecast using the adaptive updating algorithm presented in
Chapter 4. Alternatively, the AI-based error correction scheme presented in Chapter 5
and Chapter 6 can be used. An advantage of using the adaptive updating algorithm is
that it can also be used to provide an estimate of hydrologic uncertainty, however this
ability is limited to locations where real-time discharge observations are available.
114
Evacuation Decision
8.
EVACUATION DECISION
One of the most important features of a short-term flood forecast is its utility in helping
to make decisions during times of flood risk. Such decisions include those related to the
operation of hydraulic structures and the inundation of flood plains to reduce flood risk,
and the evacuation of citizens from locations threatened by flood inundation. As an
example application for the probabilistic flood forecast developed in this research the
development of a decision support system for evacuation decision is investigated.
The problem of evacuation decision is essentially that of choosing an action from a
variety of alternatives each with different consequences which depend on the
combination of the choice of action made and an uncertain future state of nature. Since
by definition a probabilistic flood forecast can provide either an estimate of the
probability with which a flood will occur or the probability at which different water
levels may be experienced, and since the losses involved with each action-state
combination can be estimated, the evacuation decision can be modeled as an
engineering decision-making problem. In this way it is possible to use a distributed
probabilistic flood forecast to provide an optimal decision regarding evacuation of
residents that is based on the probability of flood occurrence at their location. This is
considered superior to a decision based purely on a deterministic prediction of water
level with no information as to the uncertainty involved in the prediction or the range of
possible water levels that could be experienced.
A number of approaches for estimating damage due to inundation are discussed and
recommendations are given for using the probabilistic flood forecast system in making
evacuation decisions. The following discussion considers flooding which results from
overtopping of embankments only, however depending on the watershed and the
hydrological conditions being considered, flooding due to embankment failure may also
be an issue requiring attention.
8.1. Decision model
The decision regarding whether or not to evacuate an area involves making a choice as
to a course of action based on a limited available knowledge. The courses of action open
to the decision maker in a time of flood risk are considered here to be the action of
issuing an evacuation order or not issuing an evacuation order for each location within a
river basin. The knowledge available on which this decision can be made includes the
115
Evacuation Decision
probabilistic flood forecast issued for each location, the costs associated with flooding,
evacuation costs, and relevant topographical and demographical information for the
river basin.
Ultimately, a course of action is desirable for each location within an area at risk that
leads to zero casualties. Although in the interest of saving lives it may be necessary to
issue evacuation orders even at times of low inundation risk, it is important to minimize
such disruption to communities when possible. The approach suggested for this decision
model is one that aims to minimize loss of life and disruptions to communities through
identification of the evacuation decision and strategy that has the maximum expected
value under current conditions.
8.1.1. Estimating potential costs
The costs considered in the decision model for evacuation can be categorized as losses
resulting from preventable flood damage and losses resulting from evacuation.
Preventable flood damage is considered to be losses which could have been avoided
through appropriate evacuation of citizens from an affected area, such as death and
injury. Potential damage to buildings and property should not be considered when
making an evacuation decision as this damage is the same regardless of whether an
evacuation is ordered or not. Losses resulting from evacuation include costs associated
with coordinating an evacuation and providing emergency services, lost profits due to
business interruption, and costs associated with the inconvenience and lost time
associated with vacating a residential dwelling. A tradeoff therefore occurs between the
number of hours or amount of money saved as a result of no evacuation against the
potential for loss of life that could result from flooding.
Assigning equivalent cost values in terms of yen, dollars or other units to each of the
above items is difficult and can be rather subjective. There are many arguments both for
and against assigning a monetary value to human life, and in the case where a value is
assigned the figure can vary greatly depending on the approach and background
assumptions used.
8.1.2. Estimating inundation probability and severity
The probabilistic flood forecast developed in this thesis is capable of providing a
forecast of when and where river banks are likely to be overtopped. In order to utilize
116
Evacuation Decision
this information for evacuation decision making, it is necessary to be able to determine
the risk that overtopping presents to residents in regions adjacent to rivers. The ability to
determine this depends on the detail to which urban flooding dynamics are understood
and modeled in each region. In any given watershed, depending on the resources
available and geographic and demographic characteristics, a combination of strategies
may be employed throughout the watershed to estimate flood depths resulting from
embankment overtopping, such as linking the river network model with a detailed urban
flood model, making estimates based on pre-existing flood hazard maps, or using a
simple tank model strategy. The use of the probabilistic flood forecasting strategy with
each of these scenarios is discussed below.
The most detailed approach to modeling flood depths resulting from embankment
overtopping is that of employing an urban flood model. Ideally, this would allow for
dynamic real-time mapping of inundation risk across a watershed and give a visual
guide as to safe locations to evacuate to and the lowest risk routes to take. The
kinematic wave equation is acceptable for modeling one-dimensional flow in a
relatively steep channel network, however once floodwaters overtop embankments and
enter urban regions, a fully-distributed two-dimensional urban flood model is more
suitable for accurately modeling flood dynamics. There exist a wide range of urban
flood models and strategies that could be suitably adapted for use together with HydroBEAM for providing a probabilistic forecast of spatially-distributed inundation levels.
Once a forecast of inundation levels is made available, it then becomes necessary to
estimate the potential for loss of life should inundation occur. The procedure proposed
here assigns a severity index to each potential inundation level which varies from zero
inundation through to a specified inundation level which would result in the death of the
entire unevacuated population of the area being considered (Figure 8-1(b)). The
combined use of this severity curve with a probabilistic forecast of inundation levels
(Figure 8-1(a)) can be considered equivalent to a measure of the risk to life posed by
future flood conditions.
117
Evacuation Decision
p(q)
Severity
1.0
0.0
Inundation level (m)
Inundation level (m)
Figure 8-1: (a) PDF of inundation levels, and (b) severity curve
While the use of an urban flood model is attractive as it is capable of detailed flood
modeling and consideration of facilities such as underground malls and subway stations
which are at highest risk during flood events, the large amount of time and considerable
difficulty involved with the development and calibration of such models often makes
their use prohibitive.
For many regions within a watershed, especially highly-populated areas close to major
rivers, flood hazard maps may be available as a viable alternative to the development of
a detailed urban model. Flood hazard maps depict the inundation depths that may result
from embankment overflow or embankment failure during a severe flooding event,
based on past flooding experience and regional topography. Such maps are quite
subjective in that they rely heavily on the assumptions made regarding the flood event
and overflow/failure scenario, however in the absence of an urban flood model they can
be used as a rough reference from which to assess the potential risk to urban locations
posed by flood levels in adjacent river channels.
When using flood hazard maps, the shape of the severity curve must be determined
individually for each location within the target region based on the potential for
inundation as suggested by the hazard map, and the distance of the location from the
river being considered. In this case the curve is given in terms of the river flood rate in
the adjacent river, and varies from zero for the maximum flood discharge rate in the
adjacent river that would lead to no flood damage (assumed for demonstration purposes
here to be approximately equal to 100% of the design discharge rate for locations
adjacent to a river) through to a specified discharge rate which would result in the death
of the entire unevacuated population (Figure 8-2(b)).
118
Evacuation Decision
p(q)
Severity
1.0
qdesign
Discharge (m3/s)
0.0
q
qdesign
Discharge (m3/s)
q
Figure 8-2: (a) PDF of discharge rates for a location under analysis for a given
future point in time, (b) Severity curve for location under analysis
In many cases neither an online urban flood model nor a flood hazard map may be
available for assessing the risk associated with potential flood conditions. A third and
much less resource-intensive option that is available to the decision maker is to estimate
urban flood levels that would result from predicted flood conditions through the use of a
simple tank model representation of the regions adjacent to rivers. Elevation data is
available at 50m intervals within Japan, and a tank model based on this data can be used
to estimate which regions will experience urban flooding and to what degree, based on
predicted flood levels within a river basin’s channel network and the associated
embankment overflow rate. In this case a curve such as depicted in Figure 8-1(b) would
be used to describe the severity associated with each inundation level.
8.1.3. Evacuation decision formulation and timing of the evacuation
The evacuation decision problem can be formulated as a multi-stage model. At regular
time steps throughout the duration of a rainfall event a distributed probabilistic forecast
of discharge is generated for each location of interest within the watershed for several
time steps into the future. For a given location, a decision based on the forecasted flood
conditions at each future time step is required. A choice is offered between two actions,
AE: order evacuation or AE : do not order evacuation and delay decision one time step.
In making a decision when faced with a potential flood risk there is a trade-off between
ordering an evacuation too early based on a highly-uncertain forecast which risks
unnecessarily disturbing the public, and leaving the evacuation order until a point in
time when it is too late to evacuate the majority of the public.
In choosing between actions AE and AE the decision method must be able to determine
the optimal timing of the evacuation based on the amount of time it takes to evacuate a
119
Evacuation Decision
R: Fraction remaining
population. An evacuation progress index R(τ) is proposed to indicate the fraction of a
population that would remain unevacuated for evacuation orders given at various
warning lead times. This index can be plotted against lead time for each target location
as a function decreasing from one to zero as given in Figure 8-3. The shape of the
function will depend on the characteristics and demographics of the location being
modeled.
1.0
100% of population
remaining
Complete
evacuation
0.0
τ: Lead time (hrs)
Figure 8-3: Evacuation progress index
As both evacuation success and evacuation costs are modeled as being dependent on the
period of time allocated for the evacuation (lead time), the decision model is able to
optimize the timing of an evacuation should one be necessary.
This can be achieved through considering the decision in terms of a multi-stage decision
model (Figure 8-4). Although flood-related costs are modeled as a continuous function
in this research, for the sake of this explanation a decision tree for the multi-stage model
for the discrete (no flood / flood) evacuation problem is assumed. In this example the
probability of flooding at the given lead time being considered is denoted Pf and
evacuation cost and flood damage are labeled C and D respectively. In using this multistage model, the expected value of action AE , is calculated as being the expected value
of the optimal choice at the next time step. Once this is calculated it can be compared
with the expected value of AE , and a decision can be made.
In order to calculate the expected values of the actions AE , 1 and AE , 1 , the probability
of flooding from the point of view of the next step Pf* is required. Although this
probability can not be known at the present time step, the optimal estimate for this value
can be considered equal to the value of Pf from the point of view of the current time step.
In the case where action AE is chosen, this probability will be updated based on the
newly-available probabilistic flood forecast made at the next time step, which is likely
to include less uncertainty.
120
Evacuation Decision
AE , Evacuation
AE ,
AE , 1 Delayed
No evacuation evacuation
AE , 1 No evacuation
0
Present time
OF
Flooding
OF
No flooding
OF
Flooding
OF
No flooding
OF
Flooding
OF
No flooding
Flood
Damage
C**
D < D*
C**
0
C* < C**
D* < D**
C* < C**
0
0
D**
0
0
PF
1-PF
PF*
1-PF*
PF*
1-PF*
1
Next time step
Lead time under
consideration
(Higher-accuracy Prediction)
Evacuation
Costs
Lead time
Figure 8-4: Multi-stage decision model
8.1.4. Objective function formulation
A function is developed here to calculate the expected value of a given action at a given
lead time. The function estimates the combined flood damage (D) and evacuation costs
(C) for the location and lead time being considered.
Flood damage is defined for a location as the product of the number of people killed by
the flood and the value attributed to an average human life, λ:
8-1
D S q R A, n pop
where S is the severity index representing the fatality rate associated with a flood of
magnitude q, npop is the number of people in the target location prior to the evacuation
and R(A, τ) is the fraction of a population expected to remain unevacuated in the target
location at a time τ after action A is taken, such that:
R AE , R
R AE , 1.0
8-2
Evacuation cost is defined as:
C 1 R A, n pop
8-3
where A is action (AE: evacuate; AE : don’t evacuate), α is the average estimated cost of
121
Evacuation Decision
evacuating an individual and β is the average value associated with one human hour that
would be lost due to the disruption caused by an evacuation (assumed to end after τ time
steps).
The expected value (EV) of a given action per unit of population can therefore be
calculated by integrating over the range of forecasted discharge rates as
EV ( A, ) p q, S q R( A, ) dq
8-4
1 R A,
where p is the probability distribution function for discharge q at lead-time τ.
The optimal decision at any given point in time during a rainfall event can thus be made
by choosing the action that maximizes the expected value of the outcome with respect to
A and τ. The expected value for both evacuate and don’t evacuate options is calculated
and compared for every lead time up to a limit set by the flood forecast horizon. If the
expected value is optimal for the evacuate option for any of these future time steps, an
evacuation is ordered.
IF EV AE , EV AE , for any 1, 2,
, horizon THEN choose AE
where EV AE , max EV AE , 1 , EV AE , 1
8-5
8.1.5. Risk aversion
The decision model is developed above under the assumption that monetary costs are a
suitable measure of value. Furthermore it should be noted that outcomes associated with
death due to inundation, while likely to occur far less often than outcomes associated
with evacuation false alarms, are extremely costly in comparison, especially considering
that the costs while measured in monetary terms are in reality associated with loss of
lives. The public are far more likely to forgive a series of evacuation false alarms than
they are to forgive a one-off failure to issue an alarm which results in death.
For these reasons a risk aversion strategy may be preferred by the authority responsible
for issuing floods. In such cases the authority may lean towards making decisions to
order evacuations even when they are the less-than-optimal choice in terms of the
expected value criterion.
122
Evacuation Decision
For the case where the risk aversion can be assumed to arise from undesirable
consequences associated with suffering a large one-off cost, a utility function (Figure
8-5) can be utilized to convert the cost of all possible outcomes ranging from the worst
O* through to the most desirable O* into their equivalent utility values as judged by the
subjective views of the decision maker. The decision making process can then be carried
out such that the action with the maximum expected value of utility is chosen as being
the optimal solution from the viewpoint of the decision maker. The shape of the utility
function is subjective and will vary between decision makers depending on their
individual requirements. The method for constructing a utility function is presented in
von Neumann and Morgenstern (1947).
1.0
0.0
O*
O* = 0
Value ($)
Figure 8-5: Utility function
8.2. Demonstration of the evacuation decision framework
In order to demonstrate the value of the evacuation decision framework, it is used here
for a hypothetical flood event occurring in the vicinity of the city of Mino. Mino is
home to 24,100 residents in 7533 households (as at 2005). The valley region located in
the vicinity of the Mino discharge observation station at 35°32’58’’ N and 136°54’32’’ E
is considered. The Nagara River traverses this valley region flowing north to south, with
residences located along each bank.
The areas within the region that are in risk of flood are identified on a flood hazard map
provided by Mino City Council (Figure 8-6). Potential flood levels that could be
experienced due to bank failure or overtopping are given, and these are used as the basis
for determining a set of severity curves for the region as described in Table 8-1, where
the values of s0 and s1 are used to denote the points between which the curves vary from
a severity rating of zero through one. A severity level of zero indicates that conditions
produced by the corresponding discharge at the adjacent river location carry no risk of
123
Evacuation Decision
taking life, and a severity level of one indicates conditions with the potential of taking
the lives of all unevacuated residents remaining in the region. For example, areas given
the extreme rating are judged to be at maximum risk for any discharge level exceeding
100% of the design discharge, and for this reason s0 = s1 = 100%. Conversely, it is
recognized that in areas given the moderate ranking, that overtopping of river banks,
although promoting dangerous conditions, will not cause conditions as severe as for
locations with the extreme rating, where flood levels have the potential of exceeding a
depth of 2.0m. For this reason s1 is set at 200% for moderate areas which has the effect
of creating a mild sloping severity curve.
Each area is also rated in terms of estimates of the time required to evacuate residents
from the area at risk of flooding as given in Table 8-2. The curve described by r0 and r1
recognizes that evacuation time will vary between residents depending on factors such
as physical ability, access to transportation and preparedness. Furthermore, it is
recognized that there is likely to be a significant time lag between when the evacuation
decision is made and when the warning reaches each resident in the area.
For the example given here the initial cost associated with disrupting and evacuating an
individual is assumed to be 10,000 yen, the average value associated with each human
hour lost due to the evacuation is assumed to be 1000 yen, and the value associated with
a human life is set at 50,000,000 yen.
Table 8-1: Severity curve parameters
Water depth
2.0 – 5.0m
1.0 – 2.0m
0.5 – 1.0m
0.0 - 0.5m
s0
100%
100%
100%
100%
s1
100%
110%
120%
200%
1.0
Severity
Rating
Extreme
Very high
High
Moderate
0.0
0
s0
s1
Discharge (% of qDesign)
Rating
A
B
Distance to shelter
0.0 – 1.0km
1.0 km –
r1
1 hr
1 hr
124
r0
2 hr
2.5 hr
R: Fraction remaining
Table 8-2: Evacuation curve parameters
1.0
0.0
r1
r0
τ: Lead time (hrs)
Evacuation Decision
Figure 8-6: Mino flood hazard map
125
Evacuation Decision
Probabilistic flood forecast data for 1, 2 and 3-hour ahead forecasts made for Mino at
hourly steps between midday and 15:00 are given in Table 8-3 for a hypothetical event.
Although the example given considers only three forecast periods, the use of a 6-hour
ahead forecast would be used in the same manner. Probabilistic flood forecast data are
provided in pdf and cdf formats as demonstrated in Chapter 7, and for the purpose of
this example the forecasted cumulative probabilities of discharge not exceeding 100%,
105% and 110% of the design discharge at Mino are tabulated. The design water level at
Mino is given at 6.60m, corresponding to a discharge of approximately 6750 m3/s. This
event demonstrates a scenario where forecasts made at 12:00, 13:00 and 14:00 indicate
a low yet significant probability that river banks will be overtopped.
Table 8-3: Probabilistic flood forecast data
13:00
14:00
15:00
Pq=P(Q≤q)
P100
P105
P110
t=2
14:00
1.000
1.000
1.000
t=3
15:00
0.995
1.000
1.000
Pq=P(Q≤q)
P100
P105
P110
14:00
1.000
1.000
1.000
15:00
0.999
1.000
1.000
16:00
0.95
0.98
0.999
Pq=P(Q≤q)
P100
P105
P110
15:00
1.000
1.000
1.000
16:00
0.999
1.000
1.000
17:00
0.995
1.000
1.000
Pq=P(Q≤q)
P100
P105
P110
16:00
0.999
1.000
1.000
17:00
0.999
1.000
1.000
18:00
1.000
1.000
1.000
P(q)
1.0
P100
0.0
p(q)
100% design
t=0
12:00
t=1
13:00
1.000
1.000
1.000
q100 q105 q110 q
Discharge (m3/s)
Design discharge at Mino:
q100 = 6750 m3/s
Using the severity curves and evacuation curves given in Table 8-1 and Table 8-2,
together with Equation 8-4 and Equation 8-5, an evacuation decision can be made for
each area within the proximity of the river cross-section adjacent to the Mino discharge
observation station. Based on this information, the optimal decisions made for each
location in the region are as follows.
126
Evacuation Decision
12:00: Evacuation ordered for locations with severity ratings of high or greater
located at a distance greater than 1km from a shelter.
13:00: Evacuation ordered for locations with a severity rating of moderate at a
distance greater than 1km from a shelter, and for all remaining locations with
severity ratings of very high or greater.
14:00: No further evacuation required, residents in locations with a severity rating
of high and lower at a distance less than 1km from a shelter remain unevacuated.
In the decision made at 12:00 for locations at a distance less than 1km from a shelter the
action of delaying evacuation one hour is taken. As the decision model assumes a cost
for each hour of disturbance due to evacuation, this option to delay the evacuation
decision one hour is optimal based on the multi-stage decision model given in Figure
8-4 where the estimated value of flood damage D for evacuation is unchanged if the
evacuation is delayed until 13:00 as complete evacuation can be achieved in under 2
hours, but evacuation costs C = (α + βτ) are reduced slightly for the one hour delay as
the time period is reduced from τ = 3 hours to τ = 2 hours. This is the correct decision
considering that all residents from this area can still be evacuated in time based on an
evacuation order given at 14:00 if the new forecast available at that time deems it
necessary, and delaying the evacuation decision has the added advantage that the
decision can be made based on new information, which may allow a false-alarm to be
avoided all together. In the example given here the 3-hour ahead forecast made at 13:00
indicated a 5% probability that overtopping of river banks would occur at 16:00, thus in
this case it does eventually become optimal to evacuate all locations at distances of
greater than 1km from a shelter. The decision for areas with severity rating high at a
distance of greater than 1km from a shelter is demonstrated below:
127
Evacuation Decision
EV AE ,3 p q,3 S q dq.R ( AE ,3) 1 R AE ,3 3
3
10,000 1000 3
13,000 yen
EV AE ,3 max EV AE ,2 , EV AE ,2
Here p q,3 is the best estimate for p q, 2 , such that:
EV AE ,2 p q,3 S q dq.R ( AE , 2) 1 R AE , 2 2
0.000625 0.33 50,000,000 1 0.33 10,000 1000 2
10,313 8,710
19,000 yen
EV AE ,2 max EV AE ,1 , EV AE ,1
EV AE ,1 EV AE ,1 p q,3 S q dq.
31,000 yen
EV AE ,3 max EV AE ,2 , EV AE ,2 max 19,000, 31,000
19,000 yen
EV AE ,3 >EV AE ,3 and evacuation at 12:00 is optimal for considered location
At 13:00 the decision model suggests evacuation of residents from all remaining
locations with severity ratings of very high or greater based on a 1 in 1000 chance of
experiencing flooding at 15:00. This represents a very high probability that the
evacuation will be a false alarm, but considering that flooding carries very high risk of
death for these locations, this is not an unreasonable choice of action. In this way, the
decision model demonstrates the ability to be more conservative in its approach toward
areas that would suffer greatly due to flooding, and less conservative in dealing with
areas were flooding would not be catastrophic.
8.3. Evacuation path planning using probabilistic information
Once a decision is made to evacuate a given location, it is necessary to give clear
instructions as to where to evacuate to, and how to safely reach the evacuation shelter.
Traditionally, residents living in areas at high risk of flooding have been educated as to
the dangers of flooding and have been given advice as to where the nearest evacuation
128
Evacuation Decision
shelters are located should evacuation become necessary. While preparedness of this
sort is invaluable for reducing confusion during flood evacuations, probabilistic
modeling of urban flooding as discussed in the previous section can further improve the
effectiveness of the evacuation effort through real-time flood hazard mapping and
preparation of optimal evacuation routes based on flood risk.
Once an evacuation order is issued, safe and rapid evacuation becomes the focus of the
decision making. As discussed in the previous section, depending on the urban flood
modeling strategy used for the given region at risk, probabilistic forecasts of flood
inundation levels across the region can be provided together with an estimate of the
severity that the range of possible inundation levels would have for unevacuated
residents (Figure 8-1). The risk to a resident remaining in or moving through a given
location at a given lead-time is defined here as the integral of the product of the PDF of
inundation levels (Figure 8-1(a)) and the severity curve (Figure 8-1(b)):
8-6
risk( ) p q, S q dq
In this way, the risk at lead time τ for a given location can be described as ranging
between zero for a location that will be completely safe at this lead time through to a
value of one for a region that will experience extreme inundation. A plot of the risk
across the region being considered can be made and an optimal evacuation path can be
chosen such that evacuees travel between their current locations and a designated
evacuation shelter by traversing locations with the lowest risk rating. When choosing
between multiple paths, the location at highest risk along each path is identified and the
path for which this value is lowest is chosen. This is demonstrated in the conceptual
flood risk map given in Figure 8-7 where the optimal route in terms of lowest risk to the
evacuee is calculated in real time and may not necessarily be the shortest route to the
evacuation shelter. Depending on the time required for evacuation, it may be necessary
to consult flood risk maps generated for multiple lead times when choosing an
evacuation path.
129
Evacuation Decision
Figure 8-7: Conceptual flood risk maps for real-time evacuation path planning
It is currently technologically feasible in Japan and many other countries to have mobile
phone handsets pinpoint an individual’s location using GPS satellites and communicate
this location to a central emergency service. Ideally the probabilistic flood forecasting
system developed in this research could be used as discussed in this chapter as the
backbone of a flood warning and evacuation support service capable of supplying
mobile phone handsets with a map of current and forecasted inundation levels and
evacuation directions automatically generated and updated in real-time based on an
individual’s location and specific requirements.
8.4. Conclusion
A decision support system for making evacuation decisions using probabilistic
distributed flood forecasts is proposed and demonstrated. The system provides timely
evacuation orders tailor-made to each area within the watershed based on potential
130
Evacuation Decision
inundation levels for the area and the distance and corresponding evacuation time to the
nearest available shelter. The risk to each area is considered through estimating the
probability with which inundation levels will occur for each forecast lead time, and the
severity associated with each of these inundation levels. Three strategies are discussed
for estimating inundation levels in urban areas using probabilistic forecasts of discharge
within adjacent rivers.
A benefit of the approach presented here is that it provides a framework for choosing an
acceptable level of risk for each area that may be tolerated prior to issuing an evacuation
order. Informed decisions based on the additional information offered by probabilistic
forecasts become possible by considering not only the probability of flooding, but also
the potential for loss of life based on the geography of the region concerned.
An application of the system was demonstrated for a hypothetical discharge event
considering a region of the city of Mino. Although overtopping of embankments did not
occur for this event, evacuation was deemed necessary for several areas in the region
based on forecasts suggesting up to a 1 in 20 chance of flood occurrence. False alarms
were avoided for areas that could be quickly evacuated or where the risk posed by the
flood was considered low.
131
Conclusion
9.
CONCLUSION
A framework for probabilistic forecasting of short-term distributed runoff conditions
within a watershed has been proposed. The probabilistic forecast has been developed by
dividing the various uncertainties inherent in a flood forecast into precipitation
uncertainty for modeling of errors associated with distributed rainfall forecasts, and
hydrologic uncertainty for modeling model structure, model parameterization and model
input errors. These uncertainties have been modeled through the use of a distributed
rainfall-runoff model and a Monte Carlo simulation, with the resulting forecast
presented in the form of a cumulative distribution function for each required forecast
lead-time and location.
The distributed rainfall-runoff model Hydro-BEAM is described and its value in realtime flood modeling and forecasting is demonstrated. The model is calibrated to the
Nagara River watershed for the purpose of demonstrating applications of the various
components of the flood forecasting system. Although Hydro-BEAM has been used in
the past predominantly for the purpose of long term water quality and quantity
simulations, its structure has been modified to optimize it to suit real-time flood
forecasting.
As observed and forecasted rainfall is the major input to Hydro-BEAM, and as
forecasted rainfall is generally considered to be the major source of uncertainty (referred
to as precipitation uncertainty) in the runoff forecast, considerable attention is given to
the task of modeling the short-term dynamics of rainfall fields. A time series analysis
model is coupled with a translation vector model to stochastically simulate the
movement of rainfall fields, and time series and statistical models for growth-decay are
also developed. A Monte Carlo simulation is developed based on these models which
simulates the range of possible future rainfall patterns that may develop based on
recently observed rainfall field dynamics. These rainfall pattern time series are input
into Hydro-BEAM to allow an ensemble of future runoff conditions to be simulated
considering the effects of precipitation uncertainty.
Although uncertainty in the rainfall forecast is largely responsible for error in
forecasting runoff, especially at long lead-times, other factors such as limitations
associated with the rainfall-runoff model, calibration errors, and errors in radar rainfall
observation are also responsible for considerable errors in runoff modeling. Two
132
Conclusion
methods for using real-time discharge observations to reduce this type of error resulting
from hydrologic uncertainty are developed to be compatible with a distributed rainfallrunoff model. The first of these methods is an adaptive updating technique which
compares discharge observation data available at observation stations within a
watershed with Hydro-BEAM simulated hydrographs at those same locations and
adjusts discharge levels throughout the watershed to bring simulated results closer to the
observed data while maintaining continuity of discharge rate along the river network.
This technique is found to effectively reduce modeling error for several hours into the
future in the case of the Nagara River watershed.
A second alternative technique for reducing forecasting error associated with hydrologic
uncertainty is developed using AI models to perform data mining on historically
observed and simulated data sets. Genetic programming is used to search for functions
capable of describing the relationship between recently observed data and future
modeling errors. The use of a self-organizing map is introduced in an attempt to cluster
large historical data sets into meaningful groupings of data such that GP can be used to
develop a range of functions suited to different hydrograph characteristics. Although the
use of SOM remains promising for this purpose, the use of an SOM is not
recommended in the case of Nagara River due to the limited amount of training data
available for this watershed.
The AI-based error correction technique relies on real-time discharge observation data
to forecast and correct future modeling error, and as such it is only applicable for
locations in a watershed where discharge observation stations are located. For this
reason a complimentary technique is developed to interpolate and extrapolate forecast
results at observation locations to other locations within the watershed. Global and local
linear modeling approaches are investigated for identifying relationships between
hydrographs at observation stations and non-observation locations. It is found that
global linear modeling allows accurate simulations of discharge rates to be made for all
locations within a watershed within approximately 15 kilometers of a discharge
observation station.
An example application is carried out of the Monte Carlo simulation of rainfall-runoff
considering precipitation uncertainty coupled with the adaptive updating technique for
reducing modeling error considering hydrologic uncertainty. A method for considering
both forms of uncertainty in providing a comprehensive probabilistic forecast of
133
Conclusion
discharge for all locations in a watershed is developed, with results presented in the
form of cumulative distribution functions of discharge rates for a 6-hour lead time. As
would be expected, the uncertainty in the discharge forecast, as indicated by the
variance of the ensemble distribution, increases with increasing lead time.
As one example of a use for a probabilistic distributed flood forecasting system, the
problem of issuing evacuations during flood risk periods is considered. An engineering
decision making approach is discussed which aims to minimize losses due to false
evacuation alarms and deaths due to floods through making evacuation decisions and
proposing evacuation routes that maximizes the expected value of the outcome.
There is a great need for a flood forecasting system such as the one presented here that
can provide a clear picture of potential future flood risks at all locations within a
watershed. Such information is valuable not only in planning evacuations, but also in
operating hydraulic equipment for flood mitigation during times of emergency with the
goal of minimizing losses across an entire watershed.
134
References
REFERENCES
Atkeson, C.G., Moore, A.W., and Schaal, S. (1997). Locally weighted learning.
Artificial Intelligence Review 11, 11-73.
Babovic, V., and Bojkov, V. H. (2001). Runoff Modelling with Genetic Programming
and Artificial Neural Networks, D2K Technical Report 0401-1. Danish Hydraulics
Institute, Denmark.
Bathurst, J. C. (1986). Physically-based distributed modelling of an upland catchment
using the Systeme Hydrologique Europeen. J. Hydrol. 87, 79-102.
Bentley, J. L. (1980). Multidimensional divide and conquer. Communications of the
ACM 23(4), 214-229.
Beven, K. (1979). On the generalized kinematic routing method. Water Resour. Res.
15(5), 1238-1242.
Beven, K. J. (2000). Rainfall-runoff modelling. John Wiley & Sons Ltd., West Sussex,
England.
Beven, K. J., Lamb, R., Quinn, P., Romanowicz, R., and Freer, J. (1995). TOPMODEL.
In Singh, V. P. (Ed.), Computer Models of Watershed Hydrology. Water Resource
Publications, Colorado, 627-668.
Box, G. E. P. and Jenkins, G. M. (1976). Time series analysis: forecasting and control.
Holden-Day, San Francisco.
Cai, X., McKinney, D. C., and Lasdon, L. S. (2001). Solving nonlinear water
management models using a combined genetic algorithm and linear programming
approach. Advances in Water Resources, 24, 667-676.
Campolo, M., Andreussi, P., and Soldati, A. (1999). River flood forecasting with a
neural network model, Water Resour. Res. 35(4), 1191-1197.
Cheng, C. T., Ou, C. P., and Chau, K. W. (2002). Combining a fuzzy optimal model with
135
References
a genetic algorithm to solve multi-objective rainfall-runoff model calibration. J. Hydrol.
268, 72-86.
Elshorbagy, A., Simonovic, S. P., and Panu, U. S. (2000). Performance evaluation of
artificial neural networks for runoff prediction. Journal of Hydrologic Engineering, 5(4),
424-427.
Hagan, M. T., Demuth, H. B. and Beale, M. (1996). Neural network design. PWS
Publishing Company, Boston.
Hsu, K., Gupta, H. V., and Sorooshian, S. (1995). Artificial neural network modeling of
the rainfall-runoff process. Water Resour. Res. 31(10), 2517-2530.
Ishihara, T. and Takasao, T. (1963). A study on runoff pattern and its characteristics.
Bull. Disaster Prevention Research Institute, Kyoto University, 65, 1-23.
Kalman, R.E. (1960). A new approach to linear filtering and prediction problems. Trans.
ASME, J. Basic Eng. 82, 35-45.
Karunanithi, N., Grenney, W.J., Whitley, D., and Bovee, K. (1994). Neural networks for
river flow prediction. Journal of Computing in Civil Engineering, 8(2), 201-220.
Kelly, K.S. and Krzysztofowicz, R. (2000). Precipitation uncertainty processor for
probabilistic river stage forecasting. Water Resour. Res. 36(9), 2643-2653.
Kitanidis, P. K. and Bras, R. L. (1980). Real-time forecasting with a conceptual
hydrological model: 1. analysis of uncertainty. Water Resour. Res. 16(6), 1025-1033.
Kohonen, T. (2001). Self organizing maps. Springer, Berlin.
Kojiri, T., Tokai, A., and Kinai, Y. (1998). Assessment of river basin environment
through simulation with water quality and quantity. Annuals of Disaster Prevention
Research Institute, Kyoto University, No. 41 B-2, 119-134 (in Japanese).
Krzysztofowicz, R. (2001a). The case for probabilistic forecasting in hydrology. J.
Hydrol. 249, 2-9.
136
References
Krzysztofowicz, R. (2001b). Integrator of uncertainties for probabilistic river stage
forecasting: precipitation-dependent model. J. Hydrol. 249, 69-85.
Krzysztofowicz, R. and Herr, H. D. (2001). Hydrologic uncertainty processor for
probabilistic river stage forecasting: precipitation-dependent model. J. Hydrol. 249, 4668.
Lardet, P. and Obled, C. (1994). Real-time flood forecasting using a stochastic rainfall
generator. J. Hydrol. 162, 391-408.
Lees, M., Young, P., Ferguson, S., Beven, K., and Burns, J. (1994). An adaptive flood
warning scheme for the River Nith at Dumfries. In White, W. R. and Watts. J. (Ed.), 2nd
international conference on river flood hydraulics. John Wiley & Sons Ltd.
Liong, S. Y. and Sivapragasam, C. (2002). Flood stage forecasting with support vector
machines. J. American Water Resources Association, 38(1), 173-186.
Liong, S. Y., Gautam, T. R., Khu, S. T., Babovic, V., Keijzer, M., and Muttil, N. (2002).
Genetic Programming: A new paradigm in rainfall runoff modeling. J. American Water
Resources Association, 38(3), 705-718.
Lorrai, M. and Sechi, G. M. (1995). Neural nets for modeling rainfall-runoff
transformations. Water Resources Management, 9, 299-313.
Madsen, H. and Skotner, C. (2005). Adaptive state updating in real-time river flow
forecasting – a combined filtering and error forecasting procedure. J. Hydrol. 308, 302312.
Ministry of Construction. (1980). Flow management of the Kiso River channel system –
working together with integrated dam management. Kiso River Upstream River
Construction Management Division, Chubu Regional Construction Bureau, Ministry of
Construction, Japan (in Japanese).
Ministry of Construction. (1995). River improvements of the Kiso three rivers – 100
years journey. Chubu Regional Construction Bureau, Ministry of Construction, Japan
137
References
(in Japanese).
Ministry of Construction. (2000). Outline of the lower reaches of the Kiso three rivers.
Chubu Regional Construction Bureau, Ministry of Construction, Japan (in Japanese).
Moore, A. (1991). An Introductory Tutorial on kd-trees, Technical Report No. 209.
Computer Laboratory, University of Cambridge, Robotics Institute, Carnegie Mellon
University.
Moore, G. E. (1965). Cramming more components onto integrated circuits. Electronics,
38(8).
Moore, R. J. (2002). Aspects of uncertainty, reliability, and risk in flood forecasting
systems incorporating weather radar. In Bogardi, J. and Kundzewicz, Z. W. (Ed.) Risk,
reliability, uncertainty and robustness of water resources systems. Cambridge University
Press.
Park, J., Kojiri, T., Ikebuchi, S., and Oishi, S. (2000). GIS based hydrological
comparison and run-off simulation of a river basin. Fresh Perspectives on Hydrology
and Water Resources in Southeast Asia and the Pacific, Mosley, M. P. (eds.),
Christchurch, 143-156.
Puente, C. E. and Bras, R. L. (1987). Application of nonlinear filtering in the real time
forecasting of river flows. Water Resour. Res. 23(4), 675-682.
Ramírez, J. A., (2000). Prediction and modeling of flood hydrology and hydraulics. In:
Wohl, E. (Eds.), Inland Flood Hazards: Human, Riparian and Aquatic Communities.
Cambridge University Press.
Sekii, K., Smith, P. J., and Kojiri, T. (2005). A distributed filtering algorithm for
forecasting of basin-wide flood runoff. Proc. International Conference on Reservoir
Operation & River Management, Guangzhou, China.
Shepard, D. (1968). A two-dimensional interpolation function for irregularly-spaced
data, Proc. 23rd National Conference ACM, ACM, 517-524.
138
References
Sherman, L. K. (1932). Streamflow from rainfall by the unit graph method. Eng. News
Rec., 108, 501-505.
Shiiba, M. (1993). Integration of rainfall-runoff model. Lectures on recent
developments in modeling technologies. Japan Society of Hydrology and Water
Resources.
Shiiba, M., Laurenson, X., and Tachikawa, Y. (2000). Real-time stage and discharge
estimation by a stochastic-dynamic flood routing model. Hydrological Processes, 14,
481-495.
Shiiba, M., Takasao, T., and Nakakita, E. (1984). Investigation of short-term rainfall
prediction method by a translation model. Proc. 28th Japanese Conf. On Hydraulics,
JSCE, 423-428 (in Japanese).
Smith, P. J. (2003). Probabilistic short-term flood stage prediction using a distributed
rainfall-runoff model. Masters thesis, Graduate School of Engineering, Kyoto
University, Kyoto.
Smith, P. J. and Kojiri, T. (2004). Monte Carlo simulation of distributed rainfall-runoff
conditions for probabilistic short-term flood forecasting. GIS and Remote Sensing in
Hydrology, Water Resources and Environment. IAHS Publ. 289.
Smith, P. J., Sekii, K. and Kojiri, T. (2004). Error correction of a rainfall-runoff model
using genetic programming and a self-organizing map. Proceedings of 2004 Annual
Conference, Japan Society of Hydrology and Water Resources. Muroran (in Japanese).
Tachikawa, Y., Komatsu, Y., and Shiiba, M. (2003). Stochastic modelling of the error
structure of real-time predicted rainfall and rainfall field generation. Weather Radar
Information and Distributed Hydrological Modelling, IAHS Publ. no. 282.
Takasao, T., Shiiba, M., and Nakakita, E. (1994). A real-time estimation of the accuracy
of short-term rainfall prediction using radar. Stochastic and Statistical Methods in
Hydrology and Environmental Engineering, 2, 339-351.
Tamura, N. and Kojiri, T. (2002). Water quantity and turbidity simulation with
139
References
distributed runoff model in the Yellow River basin. Flood Defence ‘2002, Wu et al.
(eds.), Science Press, New York Ltd., Vol. 2, 1699-1705.
Thiessen, A.H. (1911). Precipitation averages for large areas. Monthly Weather Report,
39, 1082-1084.
Tokai, A., Kojiri, T., and Yoshikawa, H. (2002). Case study of basin wide environmental
quality assessment based on the distributed runoff model. 6th Water Resources
Symposium, Japan, 229-234 (in Japanese).
Vapnik, V. N. (1995). The nature of statistical learning theory. Springer-Verlag, New
York.
von Neumann, J. and Morgenstern, O. (1947). Theory of games and economic behavior.
Princeton, Princeton University Press.
Walker, G. (1931). On periodicity in series of related terms. Proceedings of the Royal
Society of London, A(131), 518-532.
Whigham, P. A. and Crapper, P. F. (2001). Modelling rainfall-runoff using genetic
programming. Mathematical and Computer Modelling, 33, 707-721.
Young, P. (1984). Recursive estimation and time-series analysis. Springer-Verlag, Berlin.
Yule, G. U. (1927). On a method of investigating periodicities in disturbed series, with
special reference to Wolfer's sunspot numbers. Philosophical Transactions of the Royal
Society of London, A(226), 267-298.
Zhang, L., Dawes, W.R., Hatton, T. J., Reece, P. H., Beale, G. T. H., and Packer, I.
(1999). Estimation of soil moisture and groundwater recharge using the TOPOG_IRM
model. Water Resour. Res. 35(1), 149-161.
140
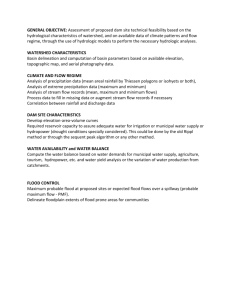
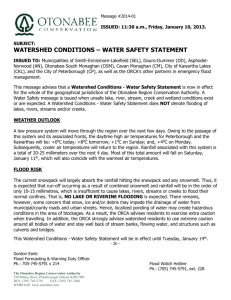
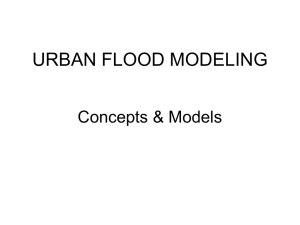
![My Flood Project [WORD 624KB]](http://s3.studylib.net/store/data/007180649_1-37937117fa0d9f223031a6f75d9a4179-300x300.png)