Stochastic prediction of long
advertisement

Stochastic prediction of long-term coastal
evolution
D.E. Reeve1 & M. Spivack2
1
Department of Civil Engineering, University of Nottingham, UK
Department of Applied Mathematics and Theoretical Physics,
University of Cambridge, UK
2
Abstract
Abstract sent already
1 Introduction
In recent years the general public have become increasingly aware of the threat
posed by coastal erosion and flooding. In response, national and local
authorities are preparing strategic management plans in many parts of the
world. A good understanding of the coastal processes is a crucial ingredient on
which the planning process depends. This paper describes results from a study
to initiate the development of statistical methods for predicting changes in
coastal morphology over the long term.
While there are many methods available for predicting the short-term (weeks to
a year) coastal response to physical processes, the same is not true for
predicting long-term (decades to a century) changes in coastal morphology.
Researchers have employed a variety of statistical techniques to analyse
historical beach records for trends and quasi-periodic behaviour, eg Winant et
al.[1], Li et al.[2]. The results of such analyses have also been used in
combination with empirical formulae as a basis on which to predict future beach
response to wave action, Hsu et al. [3].
An alternative approach has been to develop predictive equations based on a
description of the dominant physical processes that drive changes in beach
shape. Pelnard-Considere [4] developed an equation, based on observations in
laboratory experiments; to forecast changes in coastline position. This was
termed a ‘one-line’ equation as it predicted the position of a single contour line
on the beach. Subsequent researchers have extended this approach to simulate
multiple depth contours, eg. Bakker [5], Perlin & Dean [6]. Such models,
however, do not forecast the mean or variance of the beach position likely to be
experienced in real situations.
To overcome this deficiency it is necessary to employ stochastic forecasting
methods. For example, Vrijling & Meijer [7] used a one-line equation to
perform Monte Carlo simulation of beach positions; while Reeve & Fleming [8]
used a one-line model and historical shoreline positions to infer the distribution
of time-averaged sediment sources and thence to estimate likely future shoreline
movement.
A drawback of this approach is that to obtain meaningful results very many
realisations are needed.
In this paper we describe and solve an equation for the first moment (or mean)
of shoreline position. The equation describes the averaged or long-term solution
and its dependence on wave-climate; and eliminates the need for
computationally intensive Monte-Carlo simulations.
2 Summary of theory
We summarise here the derivation of the first moment equation, which
describes the mean shoreline.
The starting point is the governing equation first derived by Pelnard-Considere
[4]. Under the assumption that the beach has parallel depth contours, and that
there exists a depth D beyond which no changes in the cross-shore profile of the
beach occurs a consideration of the conservation of beach material yields
Q
y
D
x
t
(1)
where Q is the longshore sediment transport rate, D is known as the ‘depth of
closure’, t is time, x is the distance along a reference line and y is the distance of
the shoreline measured perpendicularly from the reference line.
An empirical formula relating the sediment transport to wave angle and wave
power has been developed by the US Army Corps [9]:
Q Q0 sin( 2 b )
(2)
where Q0 is the amplitude of the longshore transport rate. b is the angle
between the wave front and the shoreline, and may be written as
y
x
b 0 tan 1
(3)
where 0 is the angle between the wave front and the x-axis. Substituting
equations (2) and (3) into (1), and assuming both 0 and y/x are small yields
y
2 y
K 2
t
x
(4)
where K = 2Q0/D. Equation (4) has the form of a linear diffusion equation,
where K is a parameter that depends on the wave climate and beach material
and has the role of a diffusion coefficient. In practice, K will be a function of
both time and position, in which case a more complicated governing equation
results, Larson et al [10].
Here, we let K(t) vary randomly as a function of time. In physical terms this
corresponds to accounting for variations in wave height with time. The position
of the shoreline, y(x,t) is therefore considered to be a stochastic variable.
Using equation (4) above we formulate an evolution equation, for the averaged
coastal plan shape. The first moment gives the mean value of y as it evolves
with time. In order to form the evolution equation we must first specify the
statistics of K. Assuming that K has stationary statistics and we may write
K (t ) K (t )
(5)
where the mean < K > is constant and the perturbation has mean zero and
stationary Gaussian statistics, which are known. Angled brackets denote an
ensemble average. Following the derivation given by Reeve & Spivack [11], we
take Fourier transforms of each side of equation (4) to obtain
~
y
2 K~
y
y
(6)
where the tilde denote the Fourier transform with respect to x. This has the
following solution over any time step [t, t+t]:
~
y ( , t t ) exp{ 2
t t
(t )dt }y ( , t )
~
(7)
t
Taking the average of this equation and substituting (4) into the result we
obtain, after some manipulation (see Reeve & Spivack [11]) this can be written
~
y ( , t t ) exp{ 2 K t}.
4 2
exp
2
t t t t
~
(t t )dt dt y ( , t )
t
t
(8)
Where and are the given autocorrelation function and standard deviation of
respectively.
3 Solution in specific cases
We consider the case when the correlation function for (t) is Gaussian, ie
(t t ) e
t t
T
2
(9)
The extent to which values of the coefficient are similar is governed by the
`correlation time', T, while the statistics of (t) obey a Gaussian distribution.
In practice the initial coastline configuration will depend on alongshore
position. In this case the statistics of y(x,t) will not be stationary, even though
(t) is stationary. Equation (8) is valid for an arbitrary initial coastline
configuration.
Direct comparison with previous results that have been obtained using equation
(4) in a deterministic manner, (ie with K not random), are not straightforward.
However, equation (4) is often used for predictive purposes with a ‘best
estimate’ of K and the resulting shoreline position interpreted as being
representative of the typical shoreline position. If we equate ‘best estimate’ and
ensemble average then the results of the two approaches may be compared. In
layman’s terms we will investigate whether the average shoreline position under
varying wave conditions is the same as the shoreline position obtained by
assuming perpetual mean wave conditions.
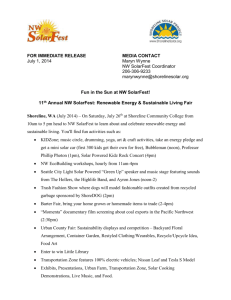
For purposes of comparison we consider the case of a tapered rectangular beach
recharge scheme on a straight beach, see Figure 1. This comprises a rectangular
block extending a distance a either side of the origin on the x-axis and
protruding a distance V from the rest of the shoreline. At the end of each
rectangular block is a triangular ‘taper’ extending to a distance b along the
shore. The initial condition is therefore given by
0
( x b)V
ba
V
y ( x,0)
V
(b x)V
ba
0
x b
b x a
a x0
0 xa
a xb
xb
(10)
V
-b
-a
0
a
b
Figure 1: Initial condition of tapered beach nourishment.
The solution of equation (4) subject to given initial condition may be written in
the form of an integral, Walton [12], and for the initial condition above a closed
form solution may be obtained as:
2 y( x , t )
[erf (AX A) erf (AX A)]
V
B AX
[erf (AX A) erf (AX B)]
BA
B AX
[erf (AX B) erf (AX A)]
BA
1
[exp{ (AX B) 2 } exp{ (AX A) 2 }]
(B A)
1
(B A)
[exp{ (AX B) 2 } exp{ (AX A) 2 }]
(11)
where A=a/(2(Kt)), B = b//(2(Kt)) and X = x/a.
Given values of a, b and K equation (11) yields the solution for the shoreline
position at any time t after the initial condition. The corresponding solution of
the stochastic equation may be obtained by inserting the Fourier transform of
(10) and equation (9) into equation (8). This yields an expression for the Fourier
transform of the ensemble average shoreline position after time t. The result is
generally not accessible by analytical methods and the inverse Fourier
transform must be evaluated numerically. Here, we have used a discrete Fourier
transform for this purpose.
Computations have been performed for the correlation function for a range of
temporal correlation scales. In order to provide some tangible measure of the
impact of the presence of temporal variations in diffusion coefficient,
comparisons are made against the analytical solution for the instantaneous
shoreline position for the same initial condition with the diffusion coefficient
set equal to its ensemble average value.
The initial condition is defined with a = 5000m, b = 1000m, V = 20m. The ‘best
estimate’ and mean diffusion coefficient, <K>, are set to 105 m2/year. The
temporal correlation function is defined by equation (9) with a correlation time,
T, of 0.1 years.
Results are shown for times t = T/2, T, 2T and 4T. Here, the full line is the
shoreline position assuming no fluctuations, and the dashed line is the solution
when fluctuations are taken into account. This demonstrates, in this case, that
neglecting the fluctuations results in an underestimate of the rate at which
'beach nourishment' is spread along the shoreline.
Picture!!!
4 Conclusions
Equations (4) and (9) are very useful as a means of simulating changes in beach
plan shape. The first moment allows us to look at long-term evolution of the
mean beach shape and quantify the dependence on the statistics of . However,
it does not provide any information about the typical variation about this mean.
Reeve & Spivack [11] illustrate how the variance of shoreline position may be
obtained as a function of its first and second moments.
We can define the second moment of the shoreline position:
y( x1 , t ) y( x2 , y)
(12)
which is the autocorrelation of the shoreline, where x1 and x2 are any two
positions along the datum line. From the equations above we can form an exact
evolution equation for the second moment. This will be discussed in a separate
paper.
Moment equations provide an efficient and rigorous basis on which to examine
long term shoreline evolution from a stochastic perspective. Numerical solution
of the equations to cover a wider range of situations is the subject of ongoing
work.
Acknowledgements
The authors acknowledge the support of the Institution of Civil Engineers, UK
and the Engineering and Physical Sciences Research Council of the UK for
support of this work via a Connectivity Research Fellowship, Grant No.
GR/N20973.
References
[1] Winant, C.D., Inman, D.L. & Nordstrom, C.E., 1975. Description of
seasonal beach changes using empirical eigenfunctions, J. Geophys. Res.,
80(15), p1979-1986.
[2] B Li & D E Reeve, 'Analysis of long-term changes in nearshore
morphology', Proceedings of IAHR Symposium on River, Coastal and
Estuarine Morphodynamics, Genoa, 6-10 Sept., 1999, p477-486.
[3] Hsu, T-W., Ou, S-H & Wang, S-K., 1994. On the prediction of beach
changes by a new 2-D empirical eigenfunction model, Coastal Engineering,
23, p255-270.
[4] Pelnard-Considere, R., 1956. Essai de theorie de l'evolution des formes de
rivage en plages de sables et de galets, Societe Hydrotechnique de France,
IV'eme Journees de L'Hydraulique Question III, rapport 1, 74-1-10.
[5] Bakker, W.T., 1968. The dynamics of a coast with a groyne system, In.
Proc. 11th ICCE, London, p492-517.
[6] Perlin, M. and Dean, R.G., 1979. A numerical model to simulate sediment
transport in the vicinity of coastal structures, CERC, Vicksburg, MS, Misc.
Rept. No. 83-10, 119pp.
[7] Vrijling, J.K. & Meyer, G.J., 1992. Probabilistic coastline position
computations, Coastal Engineering, 17, p1-23
[8] Reeve, D.E. & Fleming, C.A., 1997. A statistical-dynamical method for
predicting long term coastal evolution, Coastal Engineering, Vol 30 (3-4),
p259-280.
[9] US Army Corps of Engineers, 1984. Shore Protection Manual, Coastal
Engineering Research Centre, Washington.
[10] Larson, M., Hanson, H. & Kraus, N.C., 1997. Analytical solutions of oneline model for shoreline change near coastal structures, J. Wtrwy., Port,
Coast., and Oc. Engrg., ASCE, July/Aug, p180-191.
[11] Reeve, D.E. & Spivack, M., 2001. Prediction of long-term coastal
evolution using moment equations, in Proceedings of Coastal Dynamics
2001, Lund, Sweden, 9-15 June, 2001.
[12] Walton, T. L., 1993. Shoreline solution for tapered beach fill, J Wtrwy,
Port, Coastal & Oc. Engrg, ASCE 120 (6), p651-655.