Simple Oceanic Motions Influenced by Rotation
advertisement

Simple Oceanic Motions Influenced by Rotation
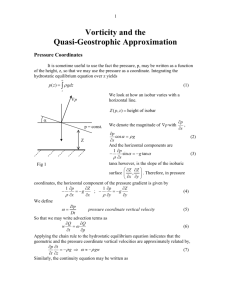
1. The Coriolis Force: Accelerated and Inertial Coordinate Systems
Consider the form of the Navier-Stokes equations in an accelerated frame of reference; i.e., a
rotating reference frame on the surface of the earth. Momentum conservation is:
DU f
Dt
1
P - g k 2 U f
(1)
Where: Uf is the velocity vector in a fixed or non-accelerated coordinate system. This expression is
directly useful in three circumstances:
When the motion considered is small-scale and fast, so that rotation effects are small relative to
other accelerations
When the frame is located on the axis of motion, at one of the planet’s two poles; and
When the planet isn’t rotating.
Obviously, it is necessary to consider the consequences of working in a rotating coordinate system.
Points about rotating coordinate systems and the origin of the Coriolis force:
The difference between a rotating and a fixed (relative to the center of gravity of the earth) coordinate system arises because a rotating coordinate system is accelerated, causing fictitious forces.
1
The Coriolis force is analogous to the centrifugal acceleration that one experiences riding in a car,
when the car goes around a corner.
The apparent force in the car can be understood in terms of Newton's 2nd Law; F= MA.
If there is no force F, then there is no acceleration A, so speed remains constant.
The car exerts a centripedal force when it corners that balances the apparent centrifugal force; i.e.,
the tendency of the passenger’s body to continue in a straight line.
For a moving fluid on the surface of the earth, the rotating earth exerts the apparent force:
Figure 1: In the northern hemisphere, a body moving northward has an excess of angular momentum, because it
comes from a position that has a greater radius – it moves to the right of north. If a body moves sourthward, then it
has less angular momentum than its new surroundings and again moves right of southward. The movement is always to the right of the initial direction in the northern hemisphere and to the left in the southern hemisphere.
Above, the dotted vector shows the initial velocity and the solid vector shows the actual motion.
2
Quantifying Acceleration in a Rotating Frame
Figure 1 is not the whole story because east-west motion is also affected, not just motion in a north
south plane. Lets see why. To translate (1) into a rotating coordinate system, we need a rule for expressing the difference between a time-derivative in an accelerated (non-inertial) reference frame
and the same derivative in a motionless frame. The transformation between the two is:
d vec f
dt
d vecr
vecr
dt
(2)
where is a vector along the axis of rotation whose length is proportional to the speed of rotation,
subscript f refers to motion in a fixed coordinate system, subscript r refers to motion in the rotating
coordinate system, and vec is an arbitrary vector. If vec is the position vector x, then (2) expresses
the difference in velocities between rotating and fixed coordinate systems:
dxf
dt
d xr
xr
dt
(3)
Points about (3)
The rate of change in the rotating coordinate system is that in the fixed coordinate system plus a
correction related to the rate of rotation; the origin from which xr and xf are measured is the center
of the earth (point O in Figure 2).
This theorem, given without proof, it is plausible from the geometry of the situation (Figure 2).
3
Points on the equator have maximal angular momentum and velocity associated with rotation of
the earth
Points at the poles have no angular momentum
Intermediate points have a velocity proportional to sin , where is co-latitude (90-latitude) and
the angle between the rotation vector and xr:
Figure 2: x xr vanishes if the point on the surface of the earth xr is along the axis of rotation ; i.e., if xr is at
one of the poles. x xr is at a maximum if the point xr is on the equation, so that the angle between xr and is
90. At latitudes between the equator and the pole, x xr has an intermediate value proportional to sin where
is co-latitude. (Picture from A. E. Gill, Atmosphere-Ocean Dynamics, p. 73).
(1) defines a relationship for velocity dx/dt. But (1) applies to any vector, so it can be applied recursively to the velocity to derive a relationship for accelerations. If it is applied to the results of (1):
4
d2xf
dt 2
d d xr
dx
xr r xr
dt dt
dt
d 2 xr
d xr
d Ur
2
x
2 U r 2 R
r
2
dt
dt
dt
dt
dUf
(4)
where: U dx/dt, and R is the radius of point xr from , i.e., the distance from the axis of rotation
(not the distance from the center of the earth xr).
The meaning of (4) is that the acceleration of a point on the surface of the rotating earth (expressed
in a rotating coordinate system) contains two "extra" terms:
2 x Ur, commonly known as the Coriolis force, and
A centripedal acceleration 2 R that will be combined into the gravitational acceleration g.
Including these "apparent" or fictitious forces in the equations of motion is the price that must be
paid for doing all our analyses in an accelerated frame of reference fixed to the surface of the rotating earth, as opposed to one stationary relative to the distant stars. While this may seem bizarre and
unintuitive, it is much better than the other alternative. Consider working in a fixed reference frame - the boundaries of any water body (e.g., the ocean shore) would be constantly moving.
We still need to:
Consider the magnitude of 2 R and its effects on the apparent gravity at any on the earth.
5
Write out the component equations of (1) including 2 x Ur, and
Modification of gravitational acceleration g = 9.81 ms-2 by the earth's rotation –
Objects do not spontaneously fly of the earth at the equator – the effect of 2 R is small and depends on R and the rate of rotation of the earth ( = 7.29 x 10-5 rad s-1).
The maximum possible value of R is at the equator; R = 6378 km, where 2 R = 0.03389 ms-2.
vanishes at the poles.
2 R/g 0.00346, indicating why objects do not spontaneously leave the earth.
It is customary to consider at the same time as centrifugal effects on g, the effects of flattening of
earth at its poles; i.e., its slight "pear shape".
The effective g 9.8 ms-2 used in oceanographic problems is a function of latitude (longitude, if one
wishes to use the best modern geoid, as is necessary in satellite oceanography). This positional dependence of g is, however, small relative to other approximations used in fluid mechanics (e.g., the
neglect of horizontal turbulent diffusion) and can be neglected for our purposes.
Figure 3: The local vertical defined by the sum
of gravitational acceleration and the centrifugal
force does not point exactly to the center of earth.
The non-spheroidal shape of the earth also contributes to the orientation of the effective g. (From
B. Cushman-Roisin, Introduction to Geophysical
Fluid Dynamics, p.20). + = 90º
6
Expression of the Coriolis force 2 x Ur in terms of its components is easy:
2 U
i
j
k
2 x
2 y
2 z
U
V
W
2 y W 2 z V i 2 x W 2 z U j 2 x V 2 y U k
2 z Vi 2 z U j
(5)
Approximations:
The final line in (5) neglects W as small relative to U and V in the x-and y-component equations.
That is, the 2x and 2y (2x = 2y =2 cos ) parts of the Coriolis force in the x and y equations of motion.
Neglect of the Coriolis force in the vertical or z equation of motion is another aspect of the Boussinesq approximation - the vertical acceleration is assumed small, regardless of coordinate system.
Functional Equations of Motion in a Rotating Coordinate System -Now we define the vertical component of 2, or 2z f 2 sin , where is latitude – A typical
value of f at mid-latitudes is 2 sin 45 1.03 x10-4 s-1 (Figure 4)
The final working form of the momentum equation (1) in a rotating frame is then:
7
DUr
1
2 U r
P - g k 2 U r
Dt
(6)
Figure 4: The vertical component 2z of 2 vanishes at the equator and is at a maximum at the pole; it varies with
sin , where is latitude.
(6) can be written in terms of the component equations, making the Boussinesq approximation:
DU
1 P
f V
2 U
Dt
x
DV
1 P
f U
2V
Dt
y
0
1 P
g
g
(9)
8
The continuity equation and scalar conservation equations for salt and temperature are unaffected by
the change between coordinate systems. Do you understand why?
Some final points:
f is not a constant; f = 2 sin , where is latitude. If one orients a right-handed coordinate system on the rotating earth such that the x-axis points east and the y-axis points north, then eastwest motion leaves f unchanged, but north-south motion changes f; i.e., f is a function of y. This
means that taking a y-derivative of the x or y-components of the momentum equations introduces
a f/y term. For most motions of interest to us, the scale of the motion is too small to worry
about this correction, but it is vital for understanding large scale ocean and atmospheric circulation. There is a whole class of Rossby waves for which f/y (not gravity) is the restoring force
that makes the wave possible.
A common form of ocean-atmosphere slang: "meridional circulation" means that occurring in a
north-south oriented plane along lines of constant longitude. "Zonal circulation" means that occurring parallel to the equator along lines of constant latitude.
The Coriolis terms neglected in (9) (compare (9) to (5)) are called the “non-traditional Coriolis
terms”. These terms actually make a difference in processes like ocean tides. Their effects are just
beginning to be studied.
2. Geostophic flow
Important ideas about Geostrophy:
9
Most large-scale flows in the interior of the ocean are almost geostrophic; i.e., the pressure gradient is balanced by the Coriolis "force" (which arises solely because of our fixed perspective on a
rotating earth), and all other forces are small.
Most of modern large-scale oceanography focuses on the part of the flow that is not in geostrophic balance, because that is what makes important things happen. If large scale motions were
completely geostrophic:
o We wouldn’t get rain out of low pressure systems.
o Summer high pressure wouldn’t bring dry weather.
o All oceanic motions would be steady.
Geostrophy was at the frontiers of oceanography a century ago.
Where does the concept of a geostrophic momentum balance apply:
It applies to a time-average view of the interior of the ocean or atmosphere. THIS IS MOST OF
THE WORLD OCEAN AND A LARGE PART OF THE ATMOSPHERE
It applies away from the surface (where winds and waves act directly) and the sea bed, where friction is important.
The realm of applicability is then perhaps below 10-50 m from the surface of the ocean, and
somewhere between a few cm to ~100m above the seabed on time scales of days to months.
Geostrophy excludes all time variations in properties -- waves of any sort, storms and any other
time-varying motion.
10
A century ago, the realm defined here was largely inaccessible, because of the difficulty of making measurements, and because measuring a time average implies having instruments capable of
making measurements over a period of months to a year a more. Aside from tide gauges and thermometers, such instruments simply did not exist a century ago. Scientists of the time had very little
intuition about such large-scale flows involving an unfamiliar fictitious force.
Defining a geostrophic flow balance will be carried out here as a scaling exercise, but that is not how
it was done historically. A century ago, there was no way to know anything about turbulence in the
interior of the ocean away from the surface. Measurements (temperature and salinity determined via
water bottles) showed short-term variations that were eventually attributed to internal waves, but
could not reveal the presence or absence of friction. Thus, an intellectual leap was required, which
was eventually justified by analogy to the more easily observed atmosphere.
One approach is simply to assume that friction is absent, but a better argument is available.
First we assume we are interested in steady motions only, justifying the interest of this approach
through a scaling argument. Friction is then excluded by the argument that flow in the interior of the
ocean does not have any obvious driving force. If friction were important, then this motion could not
be steady. So the assumption of steady flow is equivalent to assuming inviscid motion. Actually, this
argument is, in general, wrong – it turns out that the non-linear terms in the equations of motion can
generate nearly steady motion through interaction of waves (either tides or large-scale waves in the
ocean that are analogous to weather systems). In the same way, a series of storms in the atmosphere
can result in longer term changes in temperature or precipitation; e.g., a wet cold year. Such nonlinear motions are not as large (on average) as geostrophic flow, and weren't discovered/understood
11
until after WWII. Fortunately, as above, large-scale oceanic motions are approximately geostrophic,
so the argument below works, approximately.1
Consider now scaling the x-momentum equation for the flow along a continental shelf oriented
in a N-S direction. The y-momentum equation is very similar (you can do it yourself). Note that we
assume that all large-scale flows are hydrostatic, so we don't have to do the z-equation again. Also
remember that scales correspond to upper limits, to see which terms might have to be included under
the most general circumstances. Define the following scales:
U V = 0.5 ms-1
Lx 105 m
Ly 5 x105 m
f 10-4 s-1
T 5x 106 s or ~5.5 d
horizontal velocity field
width of the continental shelf
along-shelf scale
for mid latitudes
a typical scale for weather induced changes
Note that W scales as U H/Lx. Scaling the pressure term is a problem -- we don't apriori know how
to do that. But if the flow is hydrostatic, the pressure scale is:
P g H and P g H
This is one of those times that the difference between P and P is important.
The x-momentum equation is, excluding friction:
1
Actually, an intellectual equivalent of "survival of the fittest" is at work here -- many arguments are formulated to explain any unknown phenomenon. Mercifully, the incorrect ones are forgotten.
12
U
U
U
U
1 P
U
v
W
fV
T
X
Y
Z
ρ X
(8)
Each term can then be scaled:
U U 2 0.25m 2 s 2
U
2.5 x10 6 ms 2
5
X Lx
10 m
U U 0.5ms 1
6
2
10
ms
T T 5 x105 s
U U 2 H 0.25m 2 s 2
W
2.5 x106 ms 2
5
Z HLx
10 m
U U 2 0.25m 2 s 2
V
0.5 x10 6 ms 2
5
Y Ly
5 x10 m
2
1 P gH
3 10ms 100m
3x10
3x105 ms 2
5
ρ X Lx x
10 m
( 9)
fV U 104 s 1 x0.5ms1 5x105 ms2
where / ~3x10-3 for a typical coastal flow. Note that all of these collections of units are still dimensional.
13
The terms that make up Du/Dt are ~10% or less of the Coriolis and pressure terms. This logic leads
to steady, geostrophic x and y momentum balances:
fV
1 P
ρ X
fV
1 P
ρ Y
(10)
These equations, along with the hydrostatic version of the z-momentum equation, the continuity
equation (i.e., mass conservation), and salt and temperature conservation equations, govern largescale ocean circulation. Before much can be done with these relationships, the hydrostatic equation
must be formally integrated (to obtain p), which is then substituted into the x and y-momentum
equations. This argument does not exclude friction acting on flows that are faster or more rapidly
variable. But we have specifically excluded these flows from consideration.
Now, make (10) non-dimensional – divide through by U, describing all forces in the balance relative to the Coriolis force:.
For U/T, the result is (T)-1 the temporal Rossby number, which can also be written /,
where = 1/T is the frequency of the motion implied by the time scale T.
A more commonly used number, the Rossby number Ro, is defined from any of the convective
acceleration terms (e.g., U U/X); Ro = U/(L), where the generic horizontal length scale L has
been used to represent Lx or Ly, depending on the circumstance.
The Ekman number is defined as the ratio of the friction term to the Coriolis term, that we have
not yet explicitly dealt with. The largest viscous friction term is:
14
2U
U
v 2 v 2 5 x105
Z
H
(11)
This term is larger than those involving horizontal derivatives because H<<L. The Ekman number
Ek is then: Ek = /(H2). While Ro is dependent on the flow through U and L, Ek is almost entirely a
property of geometry ( and H) and fluid properties (). Sometimes, the viscosity is replaced by
the turbulent eddy diffusivity Km to give a turbulent Ekman number Ekt = Km/(H2), which is a
property of the flow, because Km is.
3. The Taylor Column and the Taylor-Proudman Theorem
There is a simple, striking laboratory demonstration of the importance of rotation. Imagine that
we are pumping fluid slowly in one direction through a box or duct made of plexiglass, so we can
see the motion. The duct is mounted (along with the pump) on a rotating table. The duct has to be
large enough and the flow has to be slow enough (<1 cm s-1) that turbulence does not occur, and friction is unimportant (low Reynolds # Re). The rotation must be fast enough (perhaps ~10 rpm) so that
rotation strongly influences the flow. Now imagine placing a dye-filled vertical cylinder in the middle of the duct, with the top of cylinder well below the free surface. Once the flow is started and the
table is rotating, then dye is released. What happens to the dye? Is it carried throughout the flow as
one expects from experience with non-rotating flows? Surprisingly, the flow goes around the column
of water with the dye in it, as if it were a rigid extension of the dye-filled cylinder! This is the "Taylor Column", named after the famous British dynamicist, Geoffrey I. Taylor.
15
Figure 5: The Coriolis force leads to many curious phenomena: a Taylor-column experiment, from Cushman
Roisin, 1994
The explanation of the Taylor column (called the Taylor-Proudman theorem) is a simple extension of geostrophy, and serves to introduce the issue of topographic constraints on oceanic flows
(and isobaric flow in the atmosphere). The Taylor-Proudman theorem can be proven beginning with
the geostrophic flow equations under the assumption that the flow is incompressible and hydrostatic:
fv
g
1 p
0 x
1 p
z
fu
1 p
0 y
u v w
0
x y z
(12)
Taking a vertical derivative of (12):
16
f
v
1 p
1 p g
0
y
0 z x
0 x z x
f
u
1 p
1 p g
u v
0
0
z
0 z y
0 y z y
z z
(13)
Consequences of (13):
The vertical shear U/z = V/z = 0.
All parcels of water making up a column of water must move together in a rigid fashion (neglecting of course a small viscous boundary later at the bed).
Therefore, it is impossible for any of the flow to move over the dye-filled column, because that
would imply vertical shear in the water column.
The Taylor-Proudman theorem applies to all geostrophic flows, not just those in the laboratory. As
we see below, more complex flow distributions are possible if the there are horizontal density gradients in the flow – here we took density as constant.
This demonstration is, it makes a very important point – the entire flow moves together, and it must
move along lines of constant pressure (isobars). This last point can be seen from the horizontal equations of motion:
17
v
1 p
f 0 x
U
1
0
p
u
1 p
f 0 y
U u, v, w use UH u, v w 0
(14)
If the flow is normal to the pressure gradient as implied by the cross-product, it is obviously along
the isobars.
To develop these ideas further, it is necessary to determine the vertical velocity. This can be done
easily by taking the horizontal divergence of the geostrophic velocity field defined above:
H UH
1 p 1 p
x f 0 y y f 0 x
1 2 p 2 p
0
f 0 xy yx
(15)
Thus –
0 U H UH
w
H UH 0
z
w
z
H {
, }
x y
(16)
18
For these motions, w = 0 at surface (bed or free), therefore, w = 0 everywhere.
Thus, the vertical velocity is vertically invariant, just like U and V. The obvious consequence is that
the column of water in the ocean cannot (if it is in geostrophic balance) move up or down a topographic slope. If it did move up or down slope, it would do so as a rigid column, perturbing the free
surface (obviously impossible). Flow must then flow around topographic obstacles, so that flow is
along lines of constant depth (along isopaths).
The familiar winter and summer weather PNW weather patterns are good examples of flows that are
almost geostrophic. In the northern hemisphere winds rotate counterclockwise around a low, sagging
a little toward the center and causing moist air to rise and cool, yielding rain, frequent in winter in
our area. In summer the opposite happens, winds rotate clockwise around a high, sagging to the outside, causing sinking of air in the high. This yields our summer dry weather.
4. Vorticity Conservation and Constraints on Non-Geostrophic Flows
The Taylor-Proudman theorem is artificial – not all oceanic flows are geostrophic. Consider a simple
example – flow along a continental shelf interrupted by a steep sub-marine canyon (of which there
are many off Washington and Northern Oregon):
19
Figure 8: Response of alongshelf flow to a submarine canyon
The inertia of the flow will cause a complex cross-isobath flow at the canyon, not susceptible to
simple analytical solution. Still. we can derive an important constraint on this and many other nongeostrophic flows. To do this, we must conserve angular momentum, including the rotation of water
columns introduced by the earth's rotation. The conserved quantity turns out to be something called
potential vorticity, which we will define below.
To make this derivation simple, we will consider only barotropic, hydrostatic flows (those driven by
a surface pressure gradient); so we write:
20
u
u
u
u v fv g
t
x
y
x
v
v
v
u v fu g
t
x
y
y
w=0
(17a,b,c)
Note that the R.H. side in 17(a,b) (the surface slope) is independent of depth, thus, the L.H. side is
also: DUH/Dt = 0. This does not totally exclude vertical velocity (i.e., terms within DUH/Dt may cancel one another). However, if the flow is inintially horizontal (w=0), then it will remain so as long as
the above force balance holds.
We also need the vertically integrated continuity (mass conservation) equation in the form:
uh v h h
0
x
y
t
H h
h u v h u h v h
x
y
t
x
y
(18)
Thus:
H UH
1 Dh
1 DH
h Dt
H Dt
(19)
21
Consequences of (19):
Horizontal divergence implies (following the flow) a change in depth of the flow, H.
(17) and (19) called the "shallow-water equations" – they apply when the aspect ratio H/L is
small, so that vertical motions are unimportant.
Formally, we have a system of three DEs in three variables (U, V and ).
Time dependence and convective accelerations are included, so complex motions can occur.
There are many solutions to these equations, depending on topography and boundary conditions.
All solutions will satisfy Conservation of Potential Vorticity, which we now derive. (Sorry
about the name, but its traditional).
Conservation of Potential Vorticity
Derivation Procedure:
1. Form "a vorticity equation from (17a,b)"; remember that the vorticity x U.
a. Get (17a,b) in a slightly different form
b. Cross-differentiate
2. The motion is horizontal; W /z 0. Therefore, only the vertical component is non-zero,
for which we'll use the symbol: z = (v/x - u/y). (Some texts use z, but is normally reserved for surface elevation in coastal problems, and I've followed that convention).
3. Combine with continuity, to get the final result.
22
"Forming a vorticity equation" sounds abstract, so think about it from a different point of view –
having a surface slope in a problem is awkward, because it can't be measured or specified in any
way. Moreover, it is vertically invariant, so it should be easy to remove it from the equations. The
obvious way to do that is to "cross-differentiate" the x and y-momentum equations (i.e., take /y
of the x-equation and /x of the y equation) and subtract. A little trick is necessary first, to make
the algebra easier. We re-write the convective terms in the horizontal momentum equation for
reasons that will be obvious later:
UH H UH
1
H UH UH UH
2
(20)
In components:
u
1 u 2 v 2
u u v v v v u
u
v
2
u x v y
x
x
x
x y
2
2
v
v
1
u
v
u
v
v
u
u v
u u v u
x y
x
2
y
y
y
y
(21)
The component momentum equations are now:
23
u
1
f v g u 2 v 2
t
x
2
v
1
f u g u 2 v 2
t
y
2
(22)
Thee is an analogy to Reynolds stresses here – the gradient in the KE =½(u2 +v2) drives changes in
the rotation (or absolute vorticity) f +.
With continuity:
H UH
1 Dh
1 DH
h Dt
H Dt
(23)
Cross-differentiate (/x of the y equation and /y of the x equation) and subtract the y equation
from the x equation, changing the order of differentiation as necessary:
u
f
v
2
1 2
2
v f v
g u v
y t
y
y
y
xy
2
v
u
2
1 2
2
f u
g u v
x t
x
x
xy
2
f
0
x
(24)
24
f/x = 0, because the Coriolis force varies only with latitude. Subtracting the first from the second
of the above yields:
D f
f H UH or :
Dt
1 D f
H UH
f Dt
Df f
f
f
f
note :
u v
v
Dt t
x
y
y
(25)
Thus, the absolute vorticity (f + ) (the sum of relative vorticity and planetary vorticity f) is related
to the convergence or divergence of the flow:
For Convergenc e : H UH 0
For Divergence : H UH 0
D f
0
Dt
D f
0
Dt
Positive, cyclonic absolute vorticity is generated by horizontal convergence (H UH< 0), while
negative or anti-cyclonic vorticity is generated by divergence in the horizontal (H UH > 0).
Sorry about the terminology, but these are the traditional names for the two types of vorticity, from
meteorology. The way to remember this is to think about PNW summer and winter weather:
25
In winter, we have cyclonic weather systems (winds from the SE) that rotate counter-clockwise
around a low. Air sags to the low (convergence) leading to rain.
In winter, we have anti-cyclonic weather systems (winds from the NW) that rotate clockwise
around a high. Air flows away from the high (divergence) leading to dry weather.
See Figure 10 below, for examples
But we're not done yet! An important conclusion can be drawn as to how a flow will behave over topography. We can combine the vorticity equation and the expression for H UH in (23):
H UH
1 Dh
1 DH
h Dt
H Dt
1 D f
H UH
f Dt
(26)
This yields:
1 D f 1 DH
f Dt
H Dt
D
f
H
Dt
0
(27)
Verify this:
26
0
D
f
H
Dt
1 D f 1 DH
f
2
H
Dt
H Dt
1 D f 1 DH
(28)
f Dt
H Dt
What does (28) mean:
(28) expresses conservation of the ratio of absolute vorticity to depth, quantity called potential
vorticity.
The physical meaning of potential vorticity conservation is simple:
o Total angular momentum must be conserved in the absence of external torques (e.g., from
bed friction or wind energy at the surface).
o An inviscid column of water will have to rotate more quickly if it is squished into a shorter
water column (by moving into an area of lesser depth) while conserving latitude.
o Its rotation will slow if it is stretched by moving into an area with greater depth.
o If it changes its latitude without changing its depth, it will have to speed up or slow down its
rotation.
27
Figure 9: Some possible changes in potential
vorticity as H changes; from Apel, 1987
Figure 10: Definitions of cyclonic and anti-cyclonic in the
northern and southern hemispheres, from Pond and Pickard,
1978.
28
Figure 11: Changes in vorticity when a parcel moves south or north; From Apel, 1987.
5. On the Vorticity Zoo
Not only is vorticity a somewhat difficult concept, there are several different flavors, even of the vertical component:
29
is the relative vorticity, because it is relative to a rotating frame of reference on the surface of the
earth.
f is the planetary vorticity, because it represents the rotary component of motion due solely to the
earth's rotation.
f + is called absolute vorticity, because it represents the total rotation in a fixed (inertial) frame
of reference.
(f + )/h is called potential vorticity, because, well, because it is. It is the absolute vorticity per unit
depth, and as above, as h adjusts, so does f + . (There is a weak analogy here to potential temperature, the temperature of a parcel of water moved to a reference depth of 0 m from some depth,
where, because of compression, its in situ temperature is higher.)
6. The f-Plane Approximation and Related Matters
f is a function of latitude , f = 2 sin , so df/dy = 2 cos . For many dynamical purposes, it suffices to assume f is a constant (the "f-plane" assumption). This is appropriate, for example, in shelf
dynamics problems with horizontal scales of 100s of km. When the scales are larger than this, then
one approximates: f = f0 + y, where f0 and must be chosen to match the central latitude of the
problem considered, and y is the north-south coordinate. This approach is the "-plane" assumption,
and is used in analytical treatments of the planetary waves that constitute weather systems. Global or
basin scale computer models use locally correct values of f and df/dy.
30