vector complexity
advertisement

MCS 315 ALGORITHMS WORKSHEET II
1. Write down an algorithm whose worst-case time complexity is O(n2) and
best-case time complexity is O(n).
2. Given the following chain of 5 matrices to be multiplied. Find the most
efficient parenthesization for it by applying a dynamic programming
approach. Show each step of your answer.
Matrices
A1
A2
A3
A4
A5
Dimensions
5x15
15x7
7x10
10x15
15x5
3. Given the following sequence of 4 matrices to be multiplied. Find the
most effective parenthesization for it by applying a dynamic programming
approach. Show each step of your answer.
Matrices
A1
A2
A3
A4
Dimensions
25x15
15x20
20x5
5x15
1
4. For each of the following problems, write down which design strategies
was used (in class)
a) Binary Search
b) Quick Sort
c) Merge Sort
d) Minimum Spanning Tree (Kruskal’s Algorithm)
e) Matrix Multiplication Order
5. Define the dynamic programming strategy. What are the basic approaches
to dynamic programming?
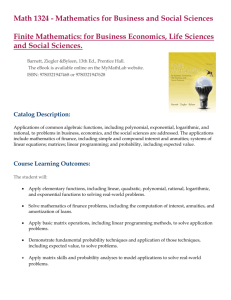
6. Given a numeric array A, the partial sum array PSA(A) is an array P that
has the same length as A in which P[i] is the sum of all the elements in the
array segment A[1..i]. For example, the following figure show an array A
and its partial sum array
P = PSA(A):
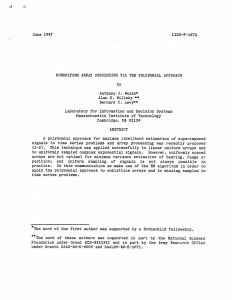
7. Consider the set S = {a, b, c, d, e} of five functions a through e, which
are classified as follows:
2
8. Which of the following sets of functions are subsets of O(n2)?
9. Which of the following sets are empty?
10. Show that ank ≠ Θ(np) where a is a constant and k and p are positive
integers and k > p.
11. Write down a divide and conquer type algorithm whose division cost is
constant, combination cost is defined by O(n3), at each step divides the
problem into three equal size subproblems.
12. We are given two sorted lists [a1, a2, ..., an] and [b1, b2, ..., bn], each of
size n. That is: a1 < a2 < ... < an and b1 < b2 < ... < bn. Write in pseudocode an algorithm that forms a single sorted list of size 2n. Establish the
upper bound for the algorithm.
3
13. Determine the lower bound of finding the median element in a list L[1:n]
by a comparison-based algorithm. Assume that the elements in the list are
distinct and n is odd. (Median element in L[1:n] is the element which is
larger than (n-1)/2 elements of L and smaller than (n-1)/2 elements of L.)
14. The matrix-vector product of an nxn matrix A=(aij)nxn and an ndimensional vector X=(x1,x2,…,xn) is the n-dimensional vector
Y=(y1,y2,…,yn), where:
n
yi
a
ij x j
, i 1,..., n
j 1
Write in pseudocode an algorithm that finds the matrix-vector product.
Find the complexity.
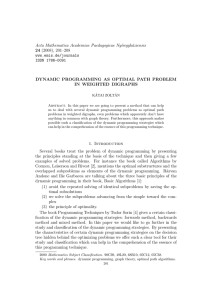
15. Find a minimum spanning tree of the following graph using Kruskal’s
algorithm.
16. Give brief answers to the following questions.
a) Give an example problem which is known that it cannot be solved in
polynomial time
b) What is intractable problem?
c) What is the relation between the problems in class NP-Complete ?
17.Answer the following sentences as TRUE or FALSE.
1. (T/F) For a given optimization problem, there exists only one optimal
solution.
2. (T/F) Dynamic programming is only applicable when subproblems
share common subproblems.
3. (T/F) Greedy algorithms use locally optimal choice.
4. (T/F) Adjacency matrix representation of a graph should be preferred
when the graph is sparse.
4
5. (T/F) Adjacency list representation of a graph uses Θ(E+V) amount of
memory.
6. (T/F) If the error rate can be controlled, an incorrect algorithm can be
useful.
7. (T/F) For an NP-Complete problem, we do not know whether there
exist an efficient polynomial time algorithm or not.
8. (T/F) Loop invariants can be used to prove that algorithms are
efficient.
9. (T/F) Among two algorithms solving the same problem, when the
problem size is n→∞, we must prefer the one having “quadratic”
running time function to the one having “linear” running time function.
10. (T/F) For the same algorithm, O(n2) is more informative than Θ(n2).
11. (T/F) 5n3 ≠ o(n3).
12. (T/F) In any case, QuickSort algorithm performs better than the
InsertionSort algorithm.
13. (T/F) We may add randomization to an algorithm in order to obtain
good average case performance over all inputs.
14. (T/F) Greedy approaches may find optimal solutions.
15. (T/F) In Kruskal’s algorithm, we always select the current safe edge
with the “least-weight” that connects two distinct components.
16. (T/F) Some tractable problems can not be solved in polynomial time.
17. (T/F) For class NP, a solution for a given problem can be verified in
polynomial time.
18. (T/F) If a graph is not directed, it cannot be searched.
19. (T/F) Both Breadth First and Depth First Searches run in exponential
time.
20. (T/F) n2 (2n )
21. (T/F) n! O(2n )
22. (T/F) n3 3n2 n 1(n3 )
5
18. For each of the following pairs of functions f(n) and g(n), state whether
f(n) = O(g(n)), f(n) = Ω(g(n)), f(n) = Θ(g(n))
or none of the above.
a) f(n) = n , g(n) = lg(n + 3)
b) f(n) = 2n − n2, g(n) = n4 + n2
c) f(n) = n n , g(n) = n2 − n
d) f(n) = n + n n , g(n) = 4n lg(n2 + 1)
e) f(n) = n2 + 3n + 4, g(n) = 6n + 7
6