– an integrated")
Preliminary Design Report for the
2004-05 ISRU University Design Competition
from the
MIT LunarDREEM Team
Lunar Demonstration of Resource Extraction
from Extraterrestrial Material
1
Preliminary Design Report Cover Page for the
2004-05 ISRU University Design Competition
from the
MIT LunarDREEM Team
(Lunar Demonstration of Resource Extraction from Extraterrestrial Material)
Academic Institution:
Massachusetts Institute of Technology
77 Massachusetts Avenue
Cambridge, MA 02139
Team Leader:
Julie Arnold (1st year Masters student, Aeronautics & Astronautics)
arnoldj@mit.edu
908-461-0548
Supervising Faculty Member:
Jeffrey A. Hoffman (Professor of Aerospace Engineering)
jhoffma1@mit.edu
617-452-2353
Student Team Members:
Rebecca Arvanites – Oxygen Extraction Team (Sophomore, Aeronautics and Astronautics)
Jason Atkins – Excavator Team (Junior, Mechanical Engineering)
Katonio Butler – Excavator Team (Junior, Aeronautics and Astronautics)
Christopher Celio – Excavator Team (Freshman, Undeclared)
Grant Kristofek – Excavator Team (2nd year Masters student, Mechanical Engineering)
Victoria Harris – Excavator Team (Sophomore, Mechanical Engineering)
Chris Mattenberger – Excavator Team (Junior, Aeronautics and Astronautics)
Jordan Medeiros – Excavator Team (Junior, Materials Science and Engineering)
James North – Oxygen Extraction Team (Junior, Aeronautics and Astronautics)
JoHanna Przybylowski – Oxygen Extraction Team (Senior, Aeronautics & Astronautics)
Emmanuel Sin – Excavator Team (Sophomore, Mechanical Engineering)
Jessica Thompson – Oxygen Extraction Team (Sophomore, Earth Atm., and Plan. Science)
Etienne Toussaint – Excavator Team (Sophomore, Mechanical Engineering)
Alice Zhou – Oxygen Extraction Team (Sophomore, Materials Science and Engineering)
Student Advisor:
Ian Garrick-Bethel – (1st year Ph.D. student, Earth and Planetary Sciences)
Team Journalist:
William T.G. Litant – (Communications Director, Aeronautics & Astronautics)
2
TABLE OF CONTENTS
Cover Page ………………………………………………………………….……………………………..…..2
Contents ……………………………………………………………………………………………….…..…..3
List of Figures …………………………………………………………………………………………………4
List of Tables ………………………………………………………………………………………………….5
PDR Summary….……………...…………………………………….…………...…..……………….6
Preliminary Design Report ………………………………………………………………………………….…7
1. In-situ Oxygen Production System……………………………………………………………..……..…7
1.1 Overview of ISOPS Architecture ……………………………………………………………….7
1.2 Preliminary Design of Furnace …………………………………………………………………..8
1.2.1 Furnace Power Analysis
1.2.2 Furnace Heating
1.2.3 Furnace Mass Considerations
1.2.4 Future work: Detailed Design of Furnace
1.3 Preliminary Design of the Radiator ……………………………………………………………..12
1.4 Preliminary Design of the Electrolysis System ………………………………………………….14
1.4.1 Power for Electrolysis
1.4.2 Design of Dual Chamber Mass-measuring Instrument
1.4.3 Design of Electrolyzer
1.5 Preliminary Design of the Hydrogen Recycling System ………………………………………...18
1.5.1 Overview of Hydrogen Flow through ISOPS
1.5.2 Verifying Adequate Hydrogen Flow through Furnace
1.5.3 Hydrogen Recycling Trade Study
1.5.4 Hydrogen Recycling System Mass
1.6 Preliminary Design of the Oxygen Storage Tank ……………..………………………………....21
1.6.1 Oxygen Tank Mass: Material Trade Study
1.7 Controls and Process Efficiency Measurements ………………………………………………....22
1.7.1 Controls and Regulation
1.7.2 Process Efficiency Measurements
1.8 Outline of Future Work …………………………………………………………………………..23
2. Regolith Excavation, Collection, and Delivery System ………………………………………………25
2.1 Preliminary Design of the Excavation System ………………………………….…………......…25
2.1.1 Preliminary Design of Treaded Conveyor Belt
2.1.2 Preliminary Design of Drill
2.1.3 Choosing an Excavation System Design
2.1.4 Future Work: Laboratory Experimentation
2.2 Preliminary Design of the Bulk Physical Characteristics Test Chamber…………………………35
2.2.1 Compression Chamber
2.2.2 Rotary Bar
2.2.3 Indentation Pin
2.2.4 Summary of Concepts
2.3 Review of Loading-Unloading System Concepts ………………………………………..…...40
2.3.1 Sliding Panels
2.3.2 Horizontal Piston
2.3.3 Dual Iris
2.4 Materials Selection Considerations ……………………………………………………………....42
3. Preliminary Concept of Operations …………...………………………………………….…...……..44
4. Outreach Update ……………………………...………………………………………….…...……..46
References
.……………………………………………………………………………………..……47
3
LIST OF FIGURES
Figure 1.1: Schematic of In-Situ Oxygen Production System (ISOPS)…………………….………………..7
Figure 1.2: Furnace Mass as a Function of Length and Cross-sectional Area……….….…………………..11
Figure 1.3: Electrolysis Power Required for Sequential Processing...……………….…….………………..15
Figure 1.4: Electrolysis Power Required for Concurrent Processing ……………….……….……………..15
Figure 1.5: Dual-Chamber Mass-measuring Instrument….. …………………………………….…………..15
Figure 1.6: Diagram of a Two-cell PEM Stack …………………………………………………..………….17
Figure 1.7: Diagram of Electrolyzer Processing… …………………………………………….…………..18
Figure 1.8: Hydrogen Flow Through the Oxygen Production System …………...…………...…………..19
Figure 1.9: ISOPS Design Process …………………………………………………...…………...………..23
Figure 2.1: Treaded Conveyor Belt Concept ……………………………………………………...……..…..26
Figure 2.2: Power for Treaded Conveyor Belt ……...………………..……………………………….……..27
Figure 2.3: Number of Scoops as a Function of Bucket Diameter……………………………………….…..28
Figure 2.4: Drill Concept ………….…………………………………………………………………….…..29
Figure 2.5: Drill Cross-section ………………………………………………………….…………………..30
Figure 2.6: Mass of Drill System ………………………………………….………………………………..31
Figure 2.7: Drill Free-body Diagram and Governing Equations …………………………………………....32
Figure 2.8: Power Required for Different Drill Radii ………………………………………………………34
Figure 2.9: CADD Model of Compression Chamber ……………………………………………………….36
Figure 2.10: CADD Model of Rotary Bar Module ………………………………………………………….37
Figure 2.11: Example of Frame Compliance ……………………………………………………………..…37
Figure 2.12: CADD Model of Indentation Pin Module ……………………………………………………...38
Figure 2.13: Stress-Strain Curve ……………………………………………………………………………..39
Figure 2.14: Sliding Panel Loading-Unloading Concept ……………………………………………………41
Figure 2.15: Horizontal Piston Loading-Unloading Concept …………………………………………..41
Figure 2.16: Dual Iris Loading-Unloading Concept …………………………………………………………42
4
LIST OF TABLES
Table 1.1: ISOP System States ……………………………………………………………………….…..…..7
Table 1.2: Furnace Power Requirements …………………………………………………………….…….....9
Table 1.3: Furnace Areas for Different Batch Sizes ……………………………………………………..…..19
Table 1.4: Hydrogen Mass Required Without Recycling …………………………………………….….…..20
Table 1.5: Cross-Sectional Area of Hydrogen Recycling Tubing …………………………………………....20
Table 1.6: Circulating Hydrogen Mass Depending on Batch Size ………………………………………...…21
Table 1.7: Oxygen Tank Material Trade Study ……………………………………………………………....22
Table 1.8: Maximum Oxygen Tank Pressure ………………………………………………………………....22
5
PDR SUMMARY
The Preliminary Design Report (CDR) details the first iteration through the design
process for two subsystems of a robotic lander exploring the South Polar region of the
moon: an integrated system for both the production of oxygen and extraction of water
from lunar regolith and a system for the excavation and transfer of lunar regolith to
experiment test chambers.
First, we present preliminary designs for the major subsystems of the In-situ Oxygen
Production System (ISOPS). These include the furnace, radiator, electrolysis system,
hydrogen recycling system, and oxygen storage tank. We describe ISOPS controls and
process efficiency measurements, and we present future work for a detailed design of
ISOPS and outline planned laboratory work. We then present preliminary design results
for the Excavation, Collection, and Delivery System. We carry through the preliminary
design for two Excavation System concepts, Treaded Conveyor Belt and Drill, and then
justify the selection of one concept to design in detail. We outline future work towards a
detailed design of the Excavation System and laboratory work. We present preliminary
designs for Bulk Physical Characteristics Test Chambers, and justify selection of one
concept to prototype and test in the laboratory. We also address considerations related to
materials selection for the Excavation, Collection, and Delivery System.
We then present a concept of operations for the Excavation, Collection, and Delivery
System and the In-Situ Oxygen Production System. Finally, we provide an update on the
team’s Outreach activities.
6
Preliminary Design Report
1. IN-SITU OXYGEN PRODUCTION SYSTEM
In-situ Oxygen Production System (ISOPS) – an integrated subsystem for both the
production of oxygen and extraction of water from lunar regolith.
1.1 Overview of ISOPS Architecture
We have selected a hydrogen reduction processing plant for the In-situ Oxygen
Production System (ISOPS). Justification for this selection can be reviewed in the
Concept Design Report (CDR). By concentrating on hydrogen reduction, we have
effectively selected competition task 4 as our area of specialization. However, a hydrogen
reduction processing system can also be used to extract water ice from lunar regolith,
fulfilling the requirements of competition task 5. Nominally, hydrogen reduction involves
heating regolith to 9000C and then flowing hydrogen over the sample to react the oxygen
in the regolith into water, which escapes as vapor and is collected for eventual
electrolysis. However, heating regolith to 9000C also serves to evaporate any water-ice
which is present in the sample, which will be collected along with the water released as
part of the hydrothermal processing. Thus, a hydrogen reduction processing system can
be used in two modes. First, regolith is heated to drive off any existing water, and the
water-ice content of a sample is measured. Second, regolith is reduced using hydrogen,
and hydrogen reduction process efficiency is measured.
The major elements of the oxygen production/water extraction system using
hydrothermal reduction processing are shown in Figure 1.1 below.
pump
heat
relief valve
Figure 1.1: Schematic of In-Situ Oxygen Production System (ISOPS)
Table 1.1: ISOP System States
System States
Subsystem
Hydrogen storage
Furnace
Radiator
Mass Balance
Electrolyzer
Oxygen Collection
Temperature [K]
Pressure [atm]
Dependent on future design iterations
1173
1
360
1
360
1
298
1
Dependent on future design iterations
7
The system process begins with loading lunar regolith into the furnace. The lunar regolith
is heated up to 9000C, or 1173K, at one atmosphere of pressure. Hydrogen then flows
through the furnace and reduces the regolith in the furnace by reacting with the oxygen in
the regolith, releasing water vapor. The water vapor is condensed as it flows through the
radiator and weighed using the mass chamber and balance to obtain one measure of the
process efficiency. The water is then electrolyzed to form oxygen gas and hydrogen gas.
The oxygen gas is pumped to the oxygen collection tank, where it is compressed and
stored and the hydrogen is recycled back to the furnace.
The states at various points in the system are shown in Table 1.1 above, however the
temperature and pressure of the hydrogen recycling system and the oxygen collection
tank will be determined by further design iterations. Various pumps, valves and sensors
are required to control the system and measure process efficiency. These are discussed in
further detail in Section 1.7. Based on the conceptual design trade study, we have
continued our preliminary design, analyzing three possible batch sizes for the regolith
loaded in the furnace: 5 kilograms, 10 kilograms, and 20 kilograms. Each of these batch
sizes is processed for 3 hours while in the furnace.
The following sections present preliminary designs for the major subsystems of the Insitu Oxygen Production System (ISOPS). These include the furnace, radiator, electrolysis
system, hydrogen recycling system, and oxygen storage tank. We describe ISOPS
controls and process efficiency measurements, and we present future work for a detailed
design of ISOPS and outline planned laboratory work.
1.2 Preliminary Design of the Furnace
In this section, we first present an analysis of the power required to heat lunar regolith.
We then discuss the different options for furnace heating. We also discuss considerations
relating to furnace mass and provide a first-order estimate for furnace mass based on the
first iteration through the ISOPS design process. Finally, we choose a heating option to
incorporate into a detailed furnace design and outline future work on the furnace.
1.2.1 Furnace Power Analysis
First order furnace power analysis includes calculations for the heating power
requirement and compensation for radiative heat losses. The power required to heat the
regolith was calculated assuming 235kJ/mol are required raise regolith temperature from
00C to 9000C [Neubert, 2004]. This value assumes a highland-type feedstock, which has a
molar mass of 0.072mol/kg and is most likely to be found in a South Pole crater. One
significant limitation of this calculation is that power must be supplied to raise regolith
temperature in a shadowed crater from -233 0C to 9000C. Because heating energy is not a
linear function of the temperature rise, no scaling was attempted to account for the lunar
environment temperature of -233 0C. Future analysis will quantify heating power more
rigorously. In current calculations, the power required for heating the regolith is given by:
P ( E * M mol * M batch ) / Theat ,
(Eq. 1.1)
8
where E is the heating energy discussed above, Mmol is the molar mass of the feedstock,
Mbatch is the batch size, and Theat is the heating time. Batch size and the heating time
influence the power required. In general, power is inversely related to time, and thus a
trade-off exists between minimizing power and minimizing the time required for
processing 100 kg of lunar soil.
Based the conceptual design trade study, we have continued our preliminary design
analyzing four possible processing options. They are listed below with the associated
furnace power requirement.
Table 1.2: Furnace Power Requirements
Processing Option
10 kg batch size + 24 hour heating time + 3 hour processing time
5 kg batch size + 6 hour heating time + 3 hour processing time
20 kg batch size + 24 hour heating time + 3 hour processing time
5 kg batch size + 1 hour heating time + 3 hour processing time
Power Requirement (Watts)
8
7
14
27
1.2.2 Furnace Heating
In this section, we discuss three furnace heating technologies: electrical, microwave and
RHU (Radioisotope Heating Units). Electrical heating furnaces are common and have
been used for many decades in Earth operation. The microwave furnace is a relatively
new technology which has recently experienced a diversification of applications. RHUs
have seen limited use in selected space applications; however, there is no precedent for
using RHUs to heat a furnace. These three technologies are discussed below in more
detail.
There are two types of electrical heating furnaces: arc and resistance. In addition,
electrical furnaces can be designed for operation in air or in a vacuum. The purpose of the
furnace in the ISOPS system is to heat the regolith to the desired temperature, and
maintain this temperature for three hours (i.e. the processing time). An electrical
resistance furnace provides this capability by passing current through the heating
elements, which get warm and radiate heat.
Microwave heating is more efficient than conventional electric heating (Shullman, 2005).
The heating efficiency depends on the materials used and the frequency of the
microwaves. The penetration depth into a material depends on the dielectric properties of
the material. The microwaves penetrate objects, thus enabling a very rapid and highintensity heat transfer throughout an item. This leads to a volumetric heating capability,
which is ideal for materials with a large volume to surface area ratio.
Radioisotope Heating Units (RHU) naturally provide thermal heat from the decay of a
radioisotope. Thus, a furnace using RHUs would need no electrical power input for
heating operations. Each RHU weighs 40 grams and continuously outputs approximately
1 W of heat; and, for use in a furnace-type application, RHUs would be distributed
around the heating area The continuous heat output of RHUs complicates their use in a
furnace; once the regolith is heated to the desired temperature, the RHUs will continue to
9
add heat to the system. One way to accommodate the continuous heat input would be to
flow additional cooling gas around inside the furnace but around the chamber containing
the regolith; this flow is separate from the reducing hydrogen flow inside of the furnace,
but can be recycled along with it. Moreover, the rate of the cooling gas flow could be
used to modulate the temperature within the furnace; for example, if the regolith
temperature begins to decrease, the rate of the cooling gas flow can be decreased. The
electrical power required for operation of the furnace system would be the power
required for the feedback of temperature and control of the cooling gas flow rate.
Though the RHU furnace would eliminate the need for electrical power to heat the
furnace, the technology is difficult to use. Since RHUs are a nuclear based technology,
they are governed by a complicated regulatory procedure, and, they can only be
employed when it has been demonstrated that no other satisfactory alternative exists.
1.2.3 Furnace Mass Considerations
Due to a dearth of information on electrical and microwave furnaces for space
applications, the mass of a furnace using such technologies is difficult to estimate. One
possible approach is to extract a mass estimate by examining systems already designed
for Earth applications. However, since the designs of these Earth-intended furnaces were
not driven by minimizing mass, the mass estimates for furnaces to be used in space will
be crude; at best this approach for estimating furnace mass could provide an upper bound.
In addition, these systems must also be scaled to accommodate the size of the sample (5
kg, 10 kg or 20 kg).
Furnaces heated by RHUs have not been designed in the past and thus no model exists.
Without a model for the furnace mass, regardless of heating type, we have examined the
mass of the furnace walls. For RHU and microwave heating the mass of the heating
elements will be low, on the order of a few kilograms. Thus, the furnace wall mass is
anticipated to drive the mass of the system.
To minimize wall mass, we aim to reduce the surface area of the furnace. For a given
volume the minimum surface area is that of a sphere. However, in this application a
cylindrical furnace will be used for easier integration into the ISOPS system. The
minimum surface area of a cylinder occurs when the longitudinal length is twice the
radius. However, the geometric distribution of the furnace (i.e. ratio of length to radius)
must consider additional constraints beyond the internal volume of the furnace.
In addition to containing the batch of regolith to be processed in the appropriate
temperature zone, the furnace must allow for an appropriate hydrogen gas flow rate. The
hydrogen gas flow rate determines the production rate of water vapor, which must be
condensed in the radiator; therefore, there is a direct relationship between the hydrogen
flow rate and the sizing of the radiator. For a given gas flow rate there is a trade between
furnace cross-sectional area and the velocity of the gas flow; as the cross-sectional area
increases, the velocity of the flow decreases. The gas flowing through the furnace cannot
stir-up the regolith; thus the maximum velocity is limited. In summary, the sizing of the
10
radiator provides a desired gas flow rate in kilograms per second and the gas velocity is
constrained to lower velocities which do not substantially disturb the regolith; the gas
flow rate and gas velocity are used to calculate the cross-sectional area of the furnace,
which will allow for determination of the full furnace geometry.
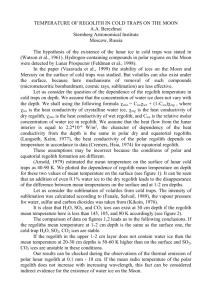
The figures show a parametric approximation for furnace mass based on cross-sectional
areas calculated in the hydrogen recycling trade study (see Section 1.5). These
calculations assume a furnace with wall of 2 mm thick Ti-6Al-4V. Wall strength is not an
issue, since the furnace is not expected bear significant structural loads. While these
calculations provide a first-order estimate, future work will include a materials trade
study and detailed analysis for furnace wall thickness.
Furnace Mass vs. Cross Sectional
Area for a Length of 0.4m
Mass vs. Furnace Length
80
Area 2.49 m^2
70
Area 0.5 m^2
60
50
Mass (kg)
Mass (kg)
60
Total Mass Curve
Area 1 m^2
40
30
20
50
End-cap Mass Curve
40
Cylindrical Shell Mass
Curve
30
20
10
10
0
0
0
0.2
0.4
0.6
0.8
1
Furnace Length (m)
0.5
1
1.5
2
2.5
Cross Sectional Area (m^2)
Figure 1.2: Furnace Mass as a Function of Length and Cross-sectional Area
While this provides a first-order estimate of furnace mass, other considerations will
contribute to furnace sizing in the detailed design. Furnace dimensions must ensure a
uniform temperature region within the furnace. The regolith should be kept within a
region whose temperature remains constant within a few degree margin; this region will
not be the entire internal volume of the furnace. Thus, calculations are needed to estimate
the dimensions of the internal uniform temperature region based on the dimensions of the
furnace and the distribution of furnace heating elements.
1.2.4 Future Work: Detailed Design of Furnace
Based on these considerations, we choose to incorporate microwave heating into our
detailed furnace design. It is more efficient than electrical resistance heating and does not
introduce regulatory constraints related to nuclear based technology. Also, microwave
heating elements are not expected to drive the mass of the furnace system.
The critical outputs of the detailed furnace design are the mass and power requirements.
To estimate the power requirement, an experiment will be performed that measures the
amount of regolith heating per power input; a microwave, such as can be found in a
kitchen, will be used to heat the regolith. The electrical power input to the microwave is
known and the temperature change of the regolith will be measured, thus providing a
11
basis for estimating the electrical power required to heat the regolith. These
measurements will be performed on JSC-1 simulant soil. JSC-1 simulant is the closest
approximation to highland regolith that we have at our disposal for experimentation.
The second value to be experimentally determined is the maximum allowable gas
velocity in the furnace. Gas will be blown across the surface of the regolith at varying
velocities. As the gas flows, the regolith will be observed visually and its mass measured
continuously. The rate of regolith mass loss will be used to characterize the amount of
regolith disturbance at various gas velocities. Again, JSC-1 simulant soil will be used for
this experiment. We will have to scale our experiment to compensate for the lower
gravity level on the lunar surface, which will make the regolith more liable to be blown
around by the hydrogen.
A numerical model of the heating profile within the furnace is currently under
development. This model will allow us to determine the region of uniform temperature
within the furnace for given furnace geometries and heating element locations. The
model will also take into consideration the heat radiated to the lunar environment.
For microwave heating, the frequency of the microwaves and the dielectric properties of
the regolith will impact the heating characteristics. If time permits we will study the
influence of frequency on the regolith heating. Moreover, the dielectric properties of
materials vary with temperature; for example, the dielectric loss factor increases with
temperature. Additional studies to characterize these effects will be completed as
necessary. However, approximations and estimations will be made when reasonable to
facilitate the completion of a furnace design in the next few months.
Finally, if time permits, we will also examine the design of a RHU heated furnace for
comparison with the microwave furnace. This design will require additional numerical
modeling to study the effect of controlling the internal temperature by providing a flow of
cooling gas or by using some other control mechanism, such as physically moving the
RHUs closer or farther from the furnace wall.
1.3 Preliminary Design of the Radiator
The radiator design consists of an aluminum tube covered with multi-layer insulation
radiating to a surrounding temperature of 40oK. The purpose of the radiator is to
condense and cool water vapor exiting the furnace at about 900oC to between 5 oC and
95oC. The preliminary design of the furnace includes four parameters: the mass flow of
water vapor and hydrogen gas through the radiator, the diameter, thickness, and length of
the aluminum tube.
We would like the mass flow rate of water vapor and hydrogen gas through the radiator
to be as low as possible, because this results in lower hydrogen flow rates through the
furnace and thus a smaller furnace cross-sectional area. However, we would also like a
radiator that is capable of performing its function even if lunar dust is deposited on it. We
12
assume that the radiator has an efficiency ( ) of 0.9 and that this efficiency will decrease
by no more than 10% if dust is deposited on the radiator.
The first step in the preliminary design is to calculate the thickness of the radiator. Since
we know that the heat radiating from the furnace must be equal to the heat conducted
through the furnace, we can calculate thickness with Equation 1.2.
Thickness
k (Tsurroundings Talu min um )
(Talu min um 4 Tsurroundings 4 )
,
(Eq. 1.2)
In this equation, we use the thermal conductivity (k) of multi-layer insulation:
0.00002W/mK. Tsurroundings is 40K, the temperature in the permanently shadowed crater
and Talumin um is 900 oC, the temperature of the aluminum tube. The emissivity of MLI is
given by , and is the Boltzmann constant. The resulting quantity tells us we must
cover the aluminum tube with a layer of multi-layer insulation which is 1.055 x 10-5
meters thick.
Based on a first iteration of the ISOPS design, we select a mass flow rate of through the
radiator of 0.002 kg/s. We also assume the diameter of the radiator is 0.0508 meters. We
then calculate the length (L1) of tube necessary to cool the mass flow one degree (from
900oC to 899oC) using Equations 1.3 and 1.4.
L1
Power
(T
4
massflow
Tsurroundings )2router
4
,
(Eq. 1.3)
Power min C p T ,
(Eq. 1.4)
where Tmassflow is 900oC, T is 1 oC, and C p is the coefficient of pressure at 900oC.
Next, the mass of that length (L1) of the radiator can be calculated by using the inner
radius of the aluminum and the density of that material as seen in the following equation.
Mass Al (router rinner ) L1 ,
2
2
(Eq. 1.5)
where router and rinner are the outer and inner radius of the radiator.
We then calculate the length (L2) of the tube necessary to cool the mass flow another
degree (from 900oC to 899oC) and the mass of L2. We continue these calculations until
the water has reached the desired temperature, and then add the segments to find the total
length and mass of the radiator.
13
Assuming lunar dust is not reducing efficiency and we condense and cool the water vapor
to 5oC , the length of the radiator must be 0.1956 meters, and the mass of the radiator is
8.06 x 10-4 kg.
However, we expect that the excavation process will deposit lunar dust onto the multilayer insulation. Therefore, we assume that the efficiency of the radiator may be reduced
by 10% over a one month period. In this case, it is important that the water is below
100oC as it exits the radiator. Further analysis shows that if the efficiency of the radiator
is reduced to 0.8, the temperature of the water as it exits the radiator will not exceed
95oC. Therefore, the preliminary radiator design is capable of withstanding a coating of
lunar dust that reduces efficiency by less than 10%.
It may be necessary to add some heating coils to the radiator system to ensure that the
radiator does not cool below 0oC during periods when no water vapor is flowing, which
might cause the formation of ice that would block the tube. We will investigate this
further in preparation for the Detailed Design Review.
1.4 Preliminary Design of the Electrolysis System
In this section, we present an analysis of the power required to electrolyze water
produced during processing. This includes a discussion of the electrolysis process and
two feasible processing options: sequential and concurrent. We then describe an
electrolysis subsystem that enables concurrent processing and process efficiency
measurements, and propose an electrolyzer design.
1.4.1 Power for Electrolysis
The power required to carry out electrolysis for a certain mass flow rate of water is
calculated at standard temperature and pressure with the following steps: first, calculate
the Gibbs Free Energy (the ideal amount of energy that must be supplied from the power
source) based on calculations of the change in enthalpy required and the amount of
energy provided from the environment; second, scale the energy required for an
electrolyzer with a 75% energy efficiency; third, use the mass of water and desired
electrolysis rate to calculate power required. Small deviations from standard temperature
and pressure do not impact power requirements.
The rate at which we must electrolyze the water depends on whether we run the furnace
and electrolyzer sequentially or concurrently. Processing architectures in which the
Furnace and Electrolysis Subsystems operate in sequence involve first heating and
reducing of one batch of regolith. Furnace activities then cease while the resulting water
is electrolyzed. Then the next batch is heated and reduced, and the cycle continues until
all regolith is processed. In this case, the time available for electrolysis is calculated by
subtracting the total amount of time required for furnace activities from the allotted
processing time of two weeks. The figure below shows the power required to electrolyze
water for feasible sequential processing options. The more time required to heat and
process regolith, the more power is required to operate the electrolyzer. This translates
14
into more electrolyzer cells, and thereby increases the weight and dimension of the
electrolyzer system.
Power to Electrolyze
Water (Watts)
Electrolysis Power Required for Feasible Sequential
Processing Options
100
Sequential Processing: 5
kg Batch Size
80
Sequential Processing:
10 kg Batch Size
60
40
Sequential Processing:
20 kg Batch Size
20
0
0
10
20
30
Time Required to Heat + Process
Regolith Batch (hours)
Sequential Processing:
25 kg Batch Size
Sequential Processing:
50 kg Batch Size
Figure 1.3: Electrolysis Power Required for Sequential Processing
Processing architectures in which the Furnace and Electrolysis Subsystems operate
concurrently require that the water produced from a certain batch of regolith be
electrolyzed within a timeframe equal to the heating time plus the processing time. This
means that the electrolyzer runs continuously, fully utilizing the time when the furnace is
heating and processing the regolith. The electrolyzer would start as soon as the hydrogen
reduction of the first batch of regolith starts and would continue processing until all the
water is drawn out of the supply of regolith. The figure below shows the power required
to electrolyze the water for concurrent processing options. As the processing time
increases, the time for electrolysis increases and thus less power is required. Less power
translates results in fewer electrolyzer cells, thereby also reducing the weight and size of
the electrolyzer system.
Power to Electrolyze
Water (Watts)
Electrolysis Power Required for Feasible Concurrent
Processing Options
100
80
Concurrent Processing: 5
kg Batch Size
60
40
Concurrent Processing:
10 kg Batch Size
20
0
0
10
20
30
Time Required to Heat + Process
Regolith Batch (hours)
Figure 1.4: Electrolysis Power Required for Concurrent Processing
Trade studies conducted for the concept design review indicate that we will investigate
processing with batch sizes of 5 kg, 10kg, or 20 kg. We are also interested in long heating
15
and processing times, since these result in a decreased power requirement for the furnace.
A comparison of Figures 1.4 and 1.5 indicates that for these batch sizes, concurrent
processing offers an advantage over sequential processing for maximum heating and
processing times.
1.4.2 Design of Dual Chamber Mass-measuring Instrument
To make concurrent processing possible while still taking efficiency measurements of
each batch of water, a dual-chamber mass measuring instrument will be used between the
radiator and the electrolyzer. The dual-chamber decouples water collection from water
electrolysis, and introduces a natural mechanism for obtaining accurate mass
measurements. The operation of a dual chamber mass-measuring instrument is
diagrammed in Figure 1.6 below.
Step 1
Step 3
Step 2
Step 4
Figure 1.5: Dual-Chamber Mass-measuring Instrument.
The water produced by the furnace is collected in the upper chamber. Once the batch of
regolith in the furnace has been completely reduced, the chamber is weighed. The upper
chamber opens and allows water into the lower chamber. The upper chamber then closes
before the furnace begins to heat the next batch of regolith. The water from the next batch
of regolith collects in the upper chamber, while the water in the lower chamber is
electrolyzed. When the water in the lower chamber has been completely electrolyzed and
the batch of regolith in the furnace has been completely reduced, the chamber is weighed
again. This operation of the Dual-Chamber Mass Measuring Instrument provides the
electrolyzer the maximum time possible to electrolyze each batch of water, thus
minimizing the electrolysis power requirement.
1.4.3 Design of Electrolyzer
Based on the CDR trade study of electrolyzers, we incorporate a Proton Exchange
Membrane (PEM) electrolyzer into the ISOPS system. The PEM electrolyzer is made up
16
of small, compact stacks. Also the PEM does not pose any safety hazards; it has no
hazardous waste and the set up of each stack makes it impossible for hydrogen to enter
the oxygen stream. The PEM electrolyzer is also capable of high density current and also
higher-differential pressure (up to 3,000 psi), but can operate at room pressure and
temperature. It also allows for quick start up (Chewonki, 2004). This is a convenient
advantage if a contingency scenario requires sequential processing in which the
electrolyzer is turned off and on during the mission.
The figure below shows the components of a two-stack PEM Electrolyzer.
Figure 1.6: Diagram of a Two-cell PEM Stack
The stacks are held together by two end plates made of stainless steel. Inside of that are
½ bipolar plates on each side to hold the anode and cathode (SGL, 2005). The bipolar
plates are made of Delrin, which is a good insulator, resists moisture and is non-reactive
to both hydrogen and oxygen. The Delrin plates have grooves to allow particle flow
across the entire cathode surface for greater surface area contact with the membrane.
Next is the nickel screen that serves as a gas diffuser. It is in contact with the platinum
covered membrane and has high electrical conductivity to help transport the gasses. In the
middle of each stack is the proton exchange membrane that is coated with Platinum,
which acts as a catalyst necessary to liberate electrons from the hydrogen and support a
reaction of protons with oxygen. The amount of Platinum needed is usually in a tenth of
a milligram per square meter. The membrane itself is made of Nafion, manufactured by
DuPont. It is essentially a perfluorinated polymer similar to Teflon and treated with
sulfur and carbon to establish an ion path that can conduct protons (Elliott, 2005).
17
The electrolysis process is initiated when water particles enter the anode side on the left
hand size of Figure 1.8 The electromotive force (EMF) and catalytic reaction then break
the H2O bonds. The membrane separates hydrogen from oxygen and carries the protons
to the cathode side where a current of electrons feeds negative charges. The proton goes
to the cathode side, receives an electron, and forms H2. The oxygen back on the anode
side is stripped of its extra electrons and forms a diatomic O2. Though its outer valence is
not full, the single occupation of two p-orbitals with parallel spins is predicted to be most
stable according to Hund’s principle.
Figure 1.7: Diagram of Electrolyzer Processing.
The O2 and H2 then travel through tubes to the oxygen collection system and the
hydrogen recycling system, respectively.
1.5 Preliminary Design of the Hydrogen Recycling System
1.5.1 Overview of Hydrogen Flow through ISOPS
The flow path the hydrogen takes through the oxygen production system starts at the
hydrogen storage tank. A pump controls the hydrogen flow out of the hydrogen tank and
into the furnace, where the hydrogen combines with the oxygen released from the
regolith to form water vapor. The water vapor and extra hydrogen then flows through the
furnace, and into the electrolyzer, where the oxygen is separated out of the water vapor
and pumped into an oxygen storage tank. This leaves the extra hydrogen and the
hydrogen that was bonded to the oxygen in the water vapor. This total hydrogen mass
flow returns and is pumped back into the hydrogen tank through the hydrogen recycling
system. The following figure shows the mass flows used in the first design iteration of the
system.
18
Flow v >.01m/s
H2
Furnace
Electrolyzer
Mass flow=.002kg/s
Mass flow=.0019kg/s
O2
Figure 1.8: Hydrogen Flow Through the Oxygen Production System
The total mass flow of 0.002 kg/s was chosen to optimize the performance of the radiator,
as well as to create a reasonable cross-sectional flow area of the system. Previous
research done with regolith processing indicates that the flow velocity through the
furnace should be 0.01m/s or greater to optimize the oxygen extraction process (McKay
1996).
1.5.2 Verifying Adequate Hydrogen Flow through Furnace
The first step in the hydrogen recycling system design is to verify that hydrogen flow
through the furnace is greater than 0.01 m/s given the radiator design parameters. Mass
flow is determined by the product of density, flow velocity, and area. For the flow
velocity in the furnace to be greater than 0.01m/s, the table below lists the required area
for a furnace to process the different potential batch sizes of 5, 10, or 20 kg of regolith.
The calculations assume a density of 0.089 kg/m3 for hydrogen and 1000 kg/m3 for the
regolith. Also listed in the table are the corresponding radii of the furnace for the
calculated cross-sectional area.
Table 1.3: Furnace Areas for Different Batch Sizes
Flow Velocity Furnace Area(m2)
Radius (m)
(m/s)
0.01
2.184769601
0.833925738
0.02
1.0923848
0.589674544
0.03
0.728256534
0.481467249
0.04
0.5461924
0.416962869
0.05
0.43695392
0.372942928
0.06
0.364128267
0.340448757
These calculations show the furnace cross-sectional areas needed to control the flow
velocity of the hydrogen and regolith flowing through the furnace. For the velocity to be
greater than 0.01 m/s, the cross-sectional area of the furnace must be smaller than 2.18m2
with a radius of less than 0.834m. We fully expect to meet this constraint since this value
for area is larger than is feasible given system mass requirements.
19
1.5.3 Hydrogen Recycling Trade Study
Without a hydrogen recycling system, all hydrogen that cycles through the system would
need to be brought in a hydrogen tank. This would be prohibitively heavy since the
hydrogen needs to flow continuously for 3 hours per batch. Only a small fraction of the
hydrogen that flows through the regolith actually reacts with the oxygen, so without
recycling, a lot of hydrogen will be lost. The following table shows the total amount of
hydrogen that would be necessary for each batch size of regolith without hydrogen
recycling. The total amount of hydrogen without hydrogen recycling would be the
product of the hydrogen flow rate, processing time (3 hours per batch), and the number of
batches. The data shows that hydrogen recycling is vital for designing a system of
reasonable weight.
Table 1.4: Hydrogen Mass Required Without Recycling
Batch Size (kg)
Hydrogen Flow rate (kg/s)
5
0.001986
10
0.001972
20
0.001944
Total hydrogen (kg)
428.976
212.976
104.976
1.5.4 Hydrogen Recycling System Mass
This table shows the calculated cross-sectional areas that determine the flow velocity
given the hydrogen flow rate for each batch size mentioned previously.
Table 1.5: Cross-Sectional Area of Hydrogen Recycling Tubing
Batch Size (kg) Flow Velocity
Area (m2)
(m/s)
5
0.01
0.833925738
5
0.02
0.589674544
5
0.03
0.481467249
5
0.04
0.416962869
5
0.05
0.372942928
10
10
10
10
10
0.01
0.02
0.03
0.04
0.05
2.215955056
1.107977528
0.738651685
0.553988764
0.443191011
20
20
20
20
20
0.01
0.02
0.03
0.04
0.05
2.184769601
1.0923848
0.728256534
0.5461924
0.43695392
20
The mass of hydrogen circulating in the hydrogen recycling system is calculated by
multiplying the hydrogen mass flow rate and the time it takes to circulate the return
piping. The time for circulation depends on the flow velocity through each section of the
system. The distance of circulation at a velocity of 0.05m/s is estimated by Equation 1.6
to be 1.05m.
Dcirculation 2 * ( furnace _ radius ) 2 * (radiator _ length) 0.0508 ,
(Eq. 1.6)
where 0.0508 meters is the estimated length of the connection ends. For constant flow
velocity of v = .05 m/s through the system, the approximate time for circulation is 21
seconds.
Table 1.6: Circulating Hydrogen Mass Depending on Batch Size
Batch Size (kg)
Hydrogen Flow rate (kg/s)
Total Circulating
Hydrogen (kg)
5
0.001986
0.041706
10
0.001972
0.041412
20
0.001944
0.040824
This amount of hydrogen is significantly less than for a non-hydrogen-recycling system.
The hydrogen storage tank can easily hold twice this amount of hydrogen and be less
than 0.5 kg in mass, assuming aluminum density of 1850kg/m3, maximum yield stress of
400MPa, and 40K operating temperature.
Given a wall thickness of 0.005m for the hydrogen recycling tubing, the aluminum
volume of the tubing would be 4.13 E-5 m3. This yields a mass of 0.1142 kg for the
hydrogen recycling tubing.
1.6 Preliminary Design of the Oxygen Storage Tank
The goals for the oxygen tank analysis are to design the most lightweight oxygen tank
capable of holding the oxygen collected by the system. The following analysis uses the
potential oxygen tank material’s maximum allowable yield stress to design the thickness
and radius which optimizes this goal.
We make three assumptions to carry through a preliminary design of the oxygen storage
tank. In the lunar crater destination, the operating temperature is assumed to be 40
degrees Kelvin. Approximately three kilograms of oxygen will be collected from
processing 100 kilograms of regolith. Also, calculations assume a spherical shape for the
oxygen tank.
1.6.1 Oxygen Tank Mass: Material Trade Study
Several lightweight materials were considered in designing the oxygen tank. The process
of calculating the weight of the oxygen tank for each material is as follows. First pressure
is calculated: P=mRT/V, from the assumed mass ‘m’ of 3kg oxygen, the gas constant
21
‘R’=260J/kgK for oxygen, and temperature ‘T’ of 40K. The tank wall width necessary to
contain the oxygen at a safe pressure for the material is calculated: W= P*radius/Max
yield stress, where radius=[(3/4pi)*Volume]1/3. The optimized mass of the oxygen tank is
then simply the density times the shell volume of the oxygen tank: Mass =
density*surface area*wall thickness. Results of the material trade study are shown in
Table 1.7.
Table 1.7: Oxygen Tank Material Trade Study
As Table 1.7 shows, the smallest tank mass of 5.354kg is obtained using the material
aluminum. The pressure in the tank wall depends on the volume chosen for the oxygen
tank. Since we are not constrained by volume, we present a range of results in Table 1.8.
Table 1.8: Maximum Oxygen Tank Pressure
Volume (m3) Pressure (105
Pa)
0.1
3.12
0.2
1.56
0.3
1.04
0.4
0.78
0.5
0.624
1.7 Controls and Process Efficiency Measurements
1.7.1 Controls and Regulation
Furnace
The furnace requires one control mechanism to initiate furnace heating. It also requires a
regulation sensor to maintain processing temperature.
Electrolysis Subsystem
The Electrolysis Subsystem requires a temperature sensor and control mechanism to
maintain ambient temperature. Also, two actuators are required for the control of the
chamber door and quick-disconnect door to the dual-chamber mass measurement. When
water stops running into the chamber from the radiator, the chamber doors open for a
predetermined time window (two seconds) for the water to drop to the lower chamber.
At a time later (two seconds) the doors close again and the balances takes a mass
measurement of the water in the lower chamber. The quick-disconnect to the electrolyzer
then opens and the water is able to flow into the electrolyzer. From that point on, the
22
quick-disconnect must be closed before the chamber doors open for the next incoming
batch.
Hydrogen Recycling System
The hydrogen recycling system will require a flowmeter and pump to regulate the flow of
the recycled hydrogen through the ISOPS.
Oxygen Collection System
There is a pump between the electrolyzer and oxygen collection system to pressurize
oxygen in the storage tank. Also, the oxygen tank will have a relief valve to guard against
unsafe conditions.
1.7.2 Process Efficiency Measurements
Three sensors are necessary to measure process efficiency. A scale will weigh the
regolith in the furnace continuously throughout processing. First, regolith is heated to
drive off any existing water, and the water-ice content of a sample is measured as the
change in mass of the regolith. Second, regolith is reduced using hydrogen, and oxygen
yield as measured as the additional change in mass of the regolith. These two
measurements are critical to determining what percentage of total oxygen yield is due to
water-ice and bound oxygen. Next, the water collected in the Dual Chamber Massmeasuring Instrument is weighed. The amount of oxygen bound in the collected water is
compared to the mass of the regolith before processing to yield another measure of
process efficiency. Finally, a pressure sensor in the oxygen tank can be used along with
tank volume and temperature to calculate the total amount of oxygen collected.
1.8 Outline of Future Work
The figure below shows the ISOPS design process. In this PDR we present our first
iteration through this design process.
Figure 1.9: ISOPS Design Process
23
In further iterations we will incorporate laboratory work to improve modeling and
optimize design. We plan to carry out some or all of the following experiments:
Measure the amount of regolith heating per unit power using microwave heating
Study the influence of microwave frequency on regolith heating characteristics
Study the influence of temperature on dielectric loss factor of regolith
Experimentally determine the maximum allowable gas velocity in the furnace
Experimentally demonstrate process efficiency measurements
24
2. REGOLITH EXCAVATION, COLLECTION, AND DELIVERY SYSTEM
Excavation, Collection and Delivery System – an integrated system for the
excavation and transfer of lunar regolith from the lunar surface to experiment test
chambers.
The Excavation System is composed of three subsystems: an Excavator Subsystem to
collect regolith, a Bulk Physical Characteristics Test Chamber to measure bulk physical
properties of the lunar regolith, and a Loading-Unloading Subsystem to load and unload
the regolith into an oxygen production furnace or other test chamber.
In this section, we present preliminary design results for the Excavation, Collection, and
Delivery System. We carry through the preliminary design for two Excavation System
concepts, a Treaded Conveyor Belt and a Drill, and then justify the selection of one
concept to design in detail. We outline future work towards a detailed design of the
Excavation System and laboratory work. We present preliminary designs for Bulk
Physical Characteristics Test Chambers, and justify selection of one concept to prototype
and test in the laboratory. Although we do not present a preliminary design for a system
to load and unload regolith into test chambers, we review the concepts presented in the
CDR. Finally, we address considerations related to materials selection for the Excavation,
Collection, and Delivery System.
2.1 Preliminary Design of the Excavation System
The results from our CDR trade study identified two promising Excavation System
concepts: the Treaded Conveyor Belt, and the Drill. In this section, we carry through the
preliminary design for both and justify the selection of the Drill to design in detail. We
also outline future work.
2.1.1 Preliminary Design of Treaded Conveyor Belt
The conveyor belt is a creative design most easily compared to the treaded track of a
snowmobile. A belt with “shovels” designed as quarter spheres is operated by a motor
and three pulleys. The entire module is able to translate both vertically and horizontally
in order to give the system a greater reach for excavation.
Figure 2.1 shows a diagram of the Treaded Conveyor Belt concept. The end of the belt is
placed on the surface of the regolith, and the conveyor belt motor moves the belt such
that the shovels scoop up small amounts of regolith. The regolith is then carried along the
sloping portion of the conveyor belt to the horizontal portion of the conveyor belt until it
overflows into a collection bin. The horizontal portion of the conveyor belt decouples the
excavation portion of the belt from the regolith delivery portion of the belt. It also
addresses the issue of shovels completing unobstructed revolutions around the belt. The
empty shovels then travel along the belt back toward the regolith.
25
Figure 2.1: Treaded Conveyor Belt Concept
2.1.1.1 Mass of the Treaded Conveyor Belt
In calculating the mass of the conveyor belt, we incorporate the following considerations
into our design:
-
Shovel radius of 50mm
Conveyor Belt Length of 1.3516m
Eighteen shovels evenly distributed along the belt
The thickness of the conveyor belt of 2mm
The density of regolith to be 1680 kg/m3
Gravity on the moon to be 1.635 m/s2
Maximum loading; all shovels contain regolith
Aluminum pulleys and shovels
Belt material with density similar to rubber
The mass of the belt is therefore a function of the mass of the shovels and the maximum
amount of regolith that can fit in all of them at one time, volume of material used to build
the conveyor belt, and the mass of the pulleys.
This results in a design which weighs approximately 7kg without the motor.
2.1.1.2 Power Requirements of the Treaded Conveyor Belt
Assuming negligible losses due to internal friction and slippage, the electrical power put
into a motor is equal to the mechanical power that is output. Mechanical power is equal
to the product of the shaft torque supplied to the system and the angular velocity of the
system.
When estimating operational speed a steady state linear velocity of 0.125m/s was
assumed and the ultimate linear velocity of the belt was assumed to be twice that. In
calculating the inertial torque of the system, the system mass was assumed to be a point
mass with a moment arm equal to the radius of the pulleys.
26
Disturbance torque associated with digging is also accounted for in the model. Looking at
past lunar missions in the The Lunar Source Book it was noted that astronauts digging
with mechanisms similar to the conveyor belt shovels incurred a maximum of 210N of
resistance force. We treated this disturbance force as a point mass with a moment arm
equal to the radius of the belt pulleys.
The inertial torque and the disturbance torque were then summed to derive a maximum
inertial torque of the conveyor belt system. This number was then multiplied by the
ultimate linear velocity and the radius to determine the power requirement for the system.
This analysis results in a design which requires a maximum of approximately 61 Watts.
The figure below shows power required as a function of system mass. Since the largest
obstacle is the disturbance torque imposed on the motor, system mass does significantly
affect the electrical power needed for operation. Each additional kilogram added to our
system’s total mass requires an extra one-third of a watt for operation.
.
Treaded Conveyor Belt Power Requirement
as a Function of System Mass
65
Power (Watts)
64
63
62
61
60
59
0
5
10
15
20
25
Mass of Treaded Conveyor Belt (kg)
Figure 2.2: Power for Treaded Conveyor Belt
2.1.1.2 Preliminary User Profile for the Treaded Conveyor Belt
Operational time is also an important consideration in system design. Since shovel size
equates directly to the volume of regolith that we are able to pick up in a given time, our
design reflects a balance between the reduced weight of fewer shovels and the added
reliability of a shorter total operational time if more shovels are used.
27
Number of Scoops as Function of Bucket Diameter
3000
Number of Scoops
2500
2000
y = 0.0875x-2.9212
1500
1000
500
0
0
0.02
0.04
0.06
0.08
0.1
0.12
Diameter of Scoop Bucket (m)
Figure 2.3: Number of Scoops as a Function of Bucket Diameter
The figure above shows the correlation between shovel size and total number of scoops
required for the mission to be done. The relationship is approximately 3rd power because
volume is a function of radius cubed.
Our current design requires a minimum of 350 scoopfuls to collect the required amount
of regolith.
2.1.2 Preliminary Design of Drill
We have also investigated a drill concept to collect regolith. Once the rover reaches the
location to be excavated, the Drill is lowered through the collection bin. Power will be
distributed to two motors: one that will apply a vertical force to the Drill and another that
will apply a torque to the Drill. The Drill will have a cutting edge that will allow it to cut
into and through the lunar regolith.
As the Drill moves downward, the regolith that is broken up by the cutting edge will
travel up through the flights to be deposited into the collection bin. We will implement
peck-drilling to insure that the flights do not fill up entirely and lodge the Drill into the
surrounding regolith. Peck-drilling is used for deep drilling operations when it is difficult
to clear material out of the drilled hole. The Drill periodically withdraws from the hole
after it has advanced a certain distance allowing regolith to loosen from the flights. Such
a method facilitates the collection of regolith, prevents the Drill from being lodged, and
protects the motor from stalling. The graphic below depicts the Drill concept.
28
Image Source: http://www.reedrill.com/html/gallery.html
Figure 2.4: Drill Concept
The following constraints must be taken into account when determining certain Drill
specifications:
Drill diameter
Flight design (pitch, width, thickness)
Cutting edge
Material selection
2.1.2.1 Mass of the Drill
In calculating the mass of the system, we consider four separate parts: the drill bit, the
drill housing, the collection bin, and the motors used to power the drill. We look at the
way mass varied with the number of holes drilled to obtain the required 100 kg of
regolith. First, we discuss some of the assumptions made to calculate the mass of these
parts. Then we detail the mass calculations.
First, we assume that the density of the regolith is constant and approximately equal to
1825 kg/m3. This number is taken from The Lunar Sourcebook, which lists measured
densities based on depth. We have used the density corresponding to a depth of one
meter, which is the depth to which we are required to drill. In doing this, we assume that
the density of regolith at the poles is not significantly different than at the equator.
Second, we assume a pitch on the drill bit of 10 degrees (0.175 radians). This is obtained
by looking at augers used in the construction industry. Finally, we assume that the
majority of the drill material is aluminum, which has a density of 2700 kg/m3.
The calculations for mass are computed as a function of the number of holes drilled.
Using the assumption that 100 kg of soil is extracted, and that all the regolith from the
hole is collected in the collection bin, we calculate the required radius of the hole to be
drilled. This radius is then used to calculate the size of the drill bit and its housing.
The Drill Bit
For the bit, we assume that a helical auger shape would be appropriate for extracting soil.
Coming up with a general formula for the mass of this shape is somewhat difficult. The
volume of the inner shaft of the bit is simple to calculate, but the helical fins are complex
to generalize. Their mass depends on several variables: the radius of the hole we are
drilling, the pitch of the helix, and the thickness of the fins. The first approach is to do a
29
volume integral about the axis of the shaft, but the result proved hard to generalize. To
simplify calculations we assume a drill cross-section described by Figure 2.5.
Figure 2.5: Drill Cross-section
The radius of the circle corresponds to the radius of the shaft, and the length of the
rectangular section corresponds to the difference between the radius of the hole and the
radius of the shaft. However, it is the width, w, which is more complex to compute with
respect to the variables discussed above. The value of the variable (w) depended on the
thickness of the helical flute (measured normal to the regolith-carrying surface of the
flute) divided by the sine of the pitch of the helix as given by Equation 2.1.
t
,
(Eq. 2.1)
w
sin( )
where is equal to the helical pitch.
The size of the shaft is varied according to the radius of our hole. Using the torque
calculations discussed in the next section, we calculate the torque required as a function
of the radius of the holes we drilled. The torque felt by the inner shaft of the bit is
assumed to have this same value. We used a value of 186 MPa as the shear strength of
aluminum to determine what the radius of the shaft needed to prevent failure due to shear.
The final equation for the mass of the drill bit is described in Equation 2.2.
Mass drill _ bit (2700kg / m3 ) * (1m) * (radius inner ) 2 * w * (radius outer radius inner ) ,
(Eq. 2.2)
The Drill Housing
The Drill Housing is modeled as a hollow cylinder just big enough to contain the drill bit.
In calculating mass, we a thickness of 0.25 cm, since the housing would simply be used
to contain the particles of regolith the system extracts, and not bear any load. Also, we
assumed that the material used would be aluminum. That led to the following formula:
Mass drill _ hou sin g (2700kg / m3 ) * (2r ) * (1m) * (.0025m) ,
(Eq. 2.3)
The Collection Bin
Calculating the mass of the collection bin is similar to calculating the mass of the drill
housing. We assume a cube-shaped bin, with an open top, the size of which was
determined by the volume of regolith collected for each hole. The side length of the cube
was just the cube-root of the volume collected, and then the volume of the five sides is
30
computed using a thickness of 0.25 cm, just as for the drill housing. Mass of the
collection bin is given by Equation 2.4.
Mass collection_ bin (2700kg / m 3 ) * (.0025m) * (
100kg
)2/ 3
(num _ holes _ drilled * regolith _ density )
(Eq. 2.4)
The Motors
The motors we assumed to be of constant mass. To obtain approximate values for their
mass, we have researched commercially available motors. Since the power of our system
is limited to 100 watts, we assume that the most powerful motor we could ever need
would require 100 watts for operation. We propose that the Drill would best be powered
by two separate motors: one to provide a torque to drive the bit, and the other to provide a
force which could drive the shaft down into the ground. For good measure then, we
assume two 100 watt motors will be used. A typical 100 Watt motor weighs
approximately 4 pounds each (Bosch, 2005). Note that we are not assuming that both
motors will be used simultaneously at their maximum power levels or that even one
motor would be operated at 100W, since this would not leave any power for other
operations. However, in case of a problem in penetrating the regolith or in extracting the
drill, the motors should have the capacity to operate at maximum power if this is deemed
operationally necessary. Other operations would be suspended until the problem is
resolved.
The total mass of the system is found by summing the masses of the four components. A
plot of total mass as a function of the number of holes drilled is shown in the figure
below.
Mass of Drill System
Mass of Drill System as a Function of
Number of Drill Holes
60
50
40
30
20
10
0
0
5
10
15
20
25
30
Number of Holes
Figure 2.6: Mass of Drill System
Drilling between ten and twenty-five holes results in a system mass under 15 kg.
31
In considering the number of holes to drill, we need also to consider the amount of time
needed to complete the drilling process. Since torque required is proportional to the cube
of the radius (Refer to Section 2.1.2.1), and the angular velocity of the bit is inversely
proportional to the torque required (since power is fixed), the amount of time required to
drill a hole varies inversely with the cube of the radius. And since the amount of regolith
extracted from one hole various with the square of the radius, the total time required to
extract 100 kg of dirt varies inversely with the radius of each hole driven. As a result,
drilling a larger number of smaller holes will require less time to extract the required
amount of regolith.
2.1.2.1 Power Required for the Drill
The length of the Drill is constrained to be at least 1 meter long in order to meet the
excavation depth requirement stated in the competition guidelines. However, the Drill
diameter is not constrained and can be manipulated. The Drill diameter should be as large
as possible to maximize regolith collection per Drill revolution; however, it must also
satisfy power limitations (<100W).
In the industry, drill and auger manufacturers are not limited by power and are therefore
able to produce more torque than is needed to power their drills. However, the diameter
of our Drill must be accurately determined to insure that we can efficiently excavate lunar
regolith within the power constraint.
The free-body diagram below illustrates how the cutting edge of the drill applies a force
along its radius. This force creates a torque about the center of the drill and counteracts a
disturbance torque, f created by the mechanical properties of the lunar regolith. For the
Drill to move with constant angular velocity through the regolith, the torque created by
the Drill must equal f .
dF
f
F r
f
J
Fr f 0
Fr f
R
Figure 2.7: Drill Free-body Diagram and Governing Equations
32
In order to calculate f we assume that the force applied by the cutting edge to the
regolith is proportional to the area on which it acts. As the area of the Drill increases, the
force required to turn the drill increases. It can then be said that there is a pressure
constant, between the force and the area on which it acts, as shown in Equation 2.5.
F A ,
(Eq. 2.5)
By analyzing the forces along the radius of the cutting edge, the sum of the torques along
the radius can be found by,
dF 2rdr
dF r 2rdr r
rdF 2r
R
2
dr
R
d 2 r
0
2
dr
0
resulting in a expression for torque required to drill through regolith given in Equation
2.6.
2
3
f r 3
.
(Eq. 2.6)
There is a direct relationship between the cubed radius of the drill and the torque required
to operate it. The pressure constant, depends on the mechanical properties of the
material that is being drilled into. In our calculations we decided to use the shear strength,
SHS of the lunar regolith as the constant of proportionality between the cubed radius of
the drill and the required torque. The force required to break up a sample section of lunar
regolith will depend on the shear strength of the area.
The shear strength was calculated using the class Mohr-Coulomb Equation 2.7 listed in
The Lunar Sourcebook.
SHS c tan ,
(Eq. 2.7)
where c is the cohesion, is the normal stress, and is the angle of friction.
A maximum normal stress (given in Equation 2.8) is calculated by estimating the
pressure that our entire system (50kg) would have on the area of our cutting edge against
surface of the Moon. We estimated our cutting edge to have a radius of 5cm and a
thickness of 1mm.
max
Fmax
817.5kPa .
A
(Eq. 2.8)
33
The shear strength (given in Equation 2.9) of our regolith sample section is determined
for the worst possible scenario. We have used the highest cohesion (3.8kPa) and highest
angle of friction (50˚) values listed in The Lunar Sourcebook.
SHS 3.8kPa 817.5kPa tan 50 978kPa .
(Eq. 2.9)
By substituting the pressure constant, for the shear strength, SHS of a sample of lunar
regolith, we find that the torque required to drill into a 5cm area of regolith given by
Equation 2.6 is approximately 256 N-m.
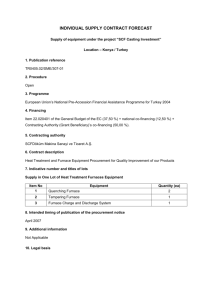
If the drill were to use 100W of power, it will turn at a speed of 3.73 rpm. However, the
Drill will not be able to use all 100W of power because the other systems would need to
be maintained. Therefore, if the Drill is to rotate at a speed of 3.73 rpm, the radius of the
Drill can be decreased to limit the amount of power usage. By determining the amount of
power that can be budgeted to the excavation system, the most efficient Drill radius can
be found.
Torque Required for Different Drill Radii at 3.73 RPM
250
Required Torque (N-m)
200
150
100
50
0
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
Drill Radius (m)
Figure 2.8: Power Required for Different Drill Radii
2.1.3 Choosing an Excavation System Design
Preliminary analysis indicates that both the Treaded Conveyor Belt and Drill concepts
meet mass and power constraints and are viable excavation concepts. However, we
choose the Drill to continue forward with a detailed design and laboratory work. The
Drill has been utilized on past lunar missions while a Treaded Conveyor Belt has not.
Additionally, the Drill possesses fewer moving parts and exposes fewer moving parts to
34
abrasive lunar regolith. The drill shaft is the only component that will be exposed to the
lunar environment; it is possible to hermetically seal all other mechanisms, including
motors. This decreases the risk of abrasive particles interfering with operation.
2.1.4 Future Work: Laboratory Experimentation
We aim to undertake some or all of the following experiments for the detailed design of
the Drill:
1. Optimizing Drill Radius- The radius of our Drill can be determined by fabricating
drills with different radii (i.e.- 2cm, 3cm,…). These drills can then be tested in
Lunar soil simulant with a constant angular velocity being applied to them. The
power required to operate the drills would then be recorded and compared. This
experiment allows the verification and refinement of Equation 2.9.
2. Optimizing Flight Design- Drills with different values of flight pitch will be
fabricated and tested in the same manner as the previous experiment. We aim to
find the drill design that collects the most regolith using the least power.
3. Stress analyses will be completed to determine whether the proportion between
the drill radius and drill length is adequate enough to prevent plastic deformation
of the drill.
4. Optimal Cutting Edge- Drills with different cutting edge designs will be tested.
2.2 Preliminary Design of the Bulk Physical Characteristics Test Chamber
In this section, we present CADD models for Bulk Physical Characteristics Test
Chambers proposed in the CDR, and justify selection of one concept to prototype and test
in the laboratory.
2.2.1 Compression Chamber
The Compression Chamber, shown in the figure below, is based on an educational brief
put out by NASA on the Mechanics of Granular Materials project. The module consists
of a compressive piston, four feedback sensors (two displacement, two voltage), and a
split rectangular chamber – one of which is connected to an actuator via a piston. The
sample is loaded into the chamber and compressed. Compressibility data is gathered by
recording the voltage applied to the actuator moving the compressive piston to achieve
the desired displacement. From the voltage we have the required force for a given
displacement- this defines the compressibility of a material.
35
Shearing Piston
Shear Line
Compressive Piston
Figure 2.9: CADD Model of Compression Chamber
After the compression cycle is completed, voltage applied to the shear actuator is slowly
increased until there is a displacement in the along the shear line. When this
displacement is occurs the voltage is recorded and converted into a force value. The
force required to cause a displacement along the shear line is the shear stress of the
material.
By forming a data set consisting of varying compressions and their shear stresses, it
would be possible to find the modulus, which predicts the shear stress for any
displacement. For instance, if the plot turns out to be linear, we can predict the shear
stress of any given compression by taking the slope of the line and using it as a
transformation constant.
The key design consideration for this test chamber is the question of what material to use
as a lubricant along the sealing edges. Because the process will take place in the
extremely cold environment of a permanently shadowed crater, greases are not feasible.
Materials and lubricants selection is discussed further in Section 2.4.
2.2.2 Rotary Bar
The Rotary Bar Module, shown in the figure below, is crudely based on the design of
certain viscosity testers. It consists of a rotational bar connected to a rotary actuator, four
feedback sensors (two displacement, two voltage), a sample chamber, and a compressive
piston. The compressive stage works in the exact same manner as the compression
chamber module, using voltage values from the compressive actuator to calculate the
force data.
36
Compressive
Piston
Rotary Bar
Figure 2.10: CADD Model of Rotary Bar Module
The shear stress data is also gathered by a method similar to that of the compression chamber.
However, in the case of the rotary chamber, measurements are recorded as torque since the
system is operating in rotation.
Displacement
Due to Frame
Compliance
Figure 2.11: Example of Frame Compliance
The largest detraction of this module is the possibility of frame compliance – the strain
that occurs in the measurement system itself as a result of the reaction forces from the test
sample. Since the rotary bar is thin if the regolith requires large forces to shear it is likely
that displacements will occur in the bar itself. This will result in inaccurate
37
measurements and must be calibrated for. In this case, the module must be calibrated for
each compression test.
2.2.3 Indentation Pin
The indentation pin module, shown in the figure below, is loosely based on nanoindentation processes used to test material hardness. It consists of a sample container,
four sensors (two displacement, two voltage, an indentation pin, and a compressive
piston. Compressibility is measured in the same manner as the two previously mentioned
modules. Force measurements are taken by recording the voltages needed by the linear
actuator to drive the pin to a given displacement into the material.
The interesting thing about this measurement module is that it has the ability to perform
multiple tests with different displacements on the same sample. If a continuous data loop
is run, it is possible to construct a complete stress-strain curve for the regolith, including
the yield stress, elastic and plastic regimes, and elastic modulus as shown in Figure 2.13.
It is even possible to measure the percent yield of the material at different stresses.
Indentation Pin
Compressive Piston
Figure 2.12: CADD Model of Indentation Pin Module
This system is also subject to frame compliance. Since the pin is very thin, and it is
subject to both bending and shear moments, it is highly likely that it will undergo
deformation and, possibly, fracture. Also, it will be impossible to recalibrate the system
38
between consecutive measurements on the same sample while maintaining a consistent
curve.
Plastic Regime
Yield Stress
Strain
Slope = elastic modulus
Elastic Regime
Percent Yield
Stress
Figure 2.13: Stress-Strain Curve
2.2.4 Summary of Concepts
All three prototypes for the bulk measurement chambers are desirable for the following
three reasons: they require very few moving parts, significantly lowering the risk of
failure; they require only four sensors, so complicated feedback loops are avoided; and
since material properties scale by known factors, we can alter the design of the modules
to any reasonable size. On the other hand, all three systems are also prone to the same
shortcomings. Since the bulk characteristics are unknown it is difficult to finalize certain
design characteristics, for instance what power and sensitivity will we need from the
actuators to obtain reasonable results? Also all the systems require transformations
and/or calculations, by hand or software, in order to gain the desired data. An analysis of
the physical properties of the lunar regolith will provide us with a better understanding of
the efficiency our devices can attain.
Particle size distribution is a variable that controls to various degrees the strength and
compressibility of the material. The majority of lunar soil samples fall in a fairly narrow
range of particle-size distributions. In general, the soil can be described as well-graded,
silty sand to sandy silt. The median particle size is 40 to 130 m, which means half of
the soil by weight is finer than the human eye can resolve. Roughly 10% to 20% of the
soil is finer than 20 m. A thin layer of dust adheres electrostaticly to everything that
comes into contact with the soil. Also, shapes of individual lunar soil particles are highly
variable, ranging from spherical to extremely angular. Particles are generally elongated
and are sub-angular to angular. Particles tend to pack together with a preferred
orientation to the long axes. The particle surface irregularities especially affect the
39
compressibility and shear strength of the soil (Heiken, 1991). While in the test chamber,
the particle structure will directly impact the relative density of the regolith and how easy
it is to compress it or conduct the rotary tests. However, alterations in the particle
structure during the compression test, will likely make it harder to conduct the test for
shear force using the rotary bar and wire pull. Based on these considerations, we choose
to prototype the Compression Chamber.
It is important to mention that there are several assumptions which impact the validity of
the test chamber measurements. Measuring bulk physical characteristics in the manners
proposed assumes that each individual particle of regolith acts in the same manner as an
atom in a densely packed material. Under stress, yield occurs due to disruption of the
theoretical particle assembly structure. Frictional reactions between individual particles
can be correlated to atomistic bond interactions. Our system, however, will not act like a
crystalline material until it has been compressed enough to assume a lattice structure.
Another consideration is that our tests do not account for possible fracture of regolith
particles under high stresses. In addition, the particles or regolith have to be spherical in
structure to act like atoms and thus, incorporate the elements of the theoretical model. In
theory, a complete analysis would require consideration of the specific structure of
individual particles of regolith as well as other interparticle forces besides friction, such
as electrostatics, which are not being included in our Bulk Physical Characteristics Test
Chamber.
2.3 Review of Loading-Unloading System Concepts
We proposed three Loading-Unloading Subsystems in the conceptual design report:
Sliding Panels, Horizontal Piston, and Dual Irises. The conceptual design trade studies
did not identify a dominant concept, and we have not yet carried through a preliminary
design of this subsystem. Still, we review these concepts for completeness. Figures 2.2 –
2.4 show notional diagrams of these concepts.
2.3.1 Loading-Unloading Concept 1: Sliding Panels
Regolith is dropped into a container at Stage 1. Then the container is pushed over to
Stage 2a. As it moves to Stage 2a the regolith begins to fall out of the bottom of the
container and is dropped onto a scale in Stage 2b. Then the regolith drops into the furnace
and is processed. After processing, the remaining waste is weighed before being dumped
out of the system. Once the regolith is dropped into the furnace the container retracts to
its original position and is loaded again. The sliding panels require two control sensors to
confirm the location of the regolith throughout the process. The first sensor confirms that
regolith is in the initial bin, and the second confirms that regolith is in position to enter
the furnace.
40
Figure 2.14:
.
Sliding Panel
Loading-Unloading Concept
2.3.2 Loading-Unloading Concept 2: Horizontal Piston
Regolith is brought in by a conveyor belt. The regolith falls into a bin where it is weighed
on a scale. Then the furnace door opens, allowing a piston to push the bin into the
furnace. The furnace door closes and processing occurs. Once processing is completed
the furnace exit door opens and a grappling piston pulls the original bin from the furnace.
The bin is pulled on top of a scale and weighed once again before it is dropped through
the trap door and out of the system. While processing occurs, a new bin is placed below
the conveyor belt and begins to be filled. The horizontal pistons will require three
sensors. One sensor measures movement of the conveyor belt, another sensor measures
the amount of regolith loaded in the bin, and the third sensor determines whether the bin
is in position for ejection.
Figure 2.15:
Horizontal Piston
Loading-Unloading
Concept
2.3.3 Loading-Unloading Concept 3: Dual Iris
Regolith is loaded onto the top iris where it is weighed. Next, the iris opens and the
regolith falls into the furnace. The top iris closes and processing occurs. After processing,
the waste regolith is weighed. Then the second iris opens and the regolith is dropped out
of the furnace and out of the system. One sensor will be needed for each iris to detect the
presence of regolith.
41
Figure 2.16:
Dual Iris
Loading-Unloading Concept
2.4 Materials Selection Considerations
When considering the best materials to use in the construction of the excavator system,
there are three main conditions to take into account. The first of these is the extreme cold
on the moon; the temperature in a permanently shadowed crater is assumed to be 40ºK.
This temperature is comparable to those encountered in cryogenics, so we investigate the
materials used to build cryogenic systems. The second condition to consider is the
extremely low pressure on the moon. We assume the environment to be a vacuum, thus,
we explore the materials used in vacuum technology. Finally, the lunar soil is extremely
abrasive; the regolith is assumed to have a texture comparable to crushed glass. While
there is no wind to blow the soil into our machines, we must assume that some will be
disturbed by the excavator, and that some will work its way into joints and between
moving parts as it works its way through the system.
The presence of a vacuum and of abrasive soil will create extreme friction between joints
in the excavator system. Heat will not dissipate via convection from these interactions
because of the vacuum, which can increase the temperature of the system by 100ºK
(Friebel, 1975). The vacuum will also exacerbate cold welding, in which the two
interacting surfaces adhere to each other instead of sliding past each other. To minimize
cold welding, we can select “interfacing materials with different crystal structures and
atomic sizes. (Friebel, 1975)” However, other limitations on our material selection may
not permit us to do this. Whether we can achieve this possibility or not, conditions
require a lubrication system.
The two main lubrication systems available are wet lubrication and dry lubrication. Wet
lubrication consists of a layer of oil or some other liquid between the two interacting
surfaces. It is long-lasting because it can replenish itself. However, no wet lubricants
were found during the investigation of materials that can withstand 40ºK temperatures
(Roller, 1998). The excavator system will thus most likely use a dry lubrication system.
Dry lubricants are “controlled contaminant interspersed between contacting surfaces.
(Roller, 1998)” Not all dry lubricants will work in a vacuum or at the temperatures
required, but there are several that do fit the constraints of the environment, such as
molybdenum disulfide or Teflon. Dry lubricants have a shorter service life than wet
42
lubricants, so the number of cycles the joints will be undergoing must be taken into
account. Outgassing (the release of gases trapped in a material) must also be accounted
for; different lubricants have different rates of outgassing. Outgassing increases with
temperature, so it will most likely not be a large problem for the excavator system, which
will operate at a low temperature (Answers.com, 2005).
Structural materials are less affected by the extreme conditions than lubricants. Most
metals will work in a vacuum at low temperatures. There are some exceptions; for
example, nickel steels cannot be used in temperatures below 77ºK (Weisend, 1998).
However, aluminum alloys and austenitic stainless steels, among other metals, are often
used in cryogenic applications. The stainless steels in particular are easily welded and
have low outgassing rates (Weisend, 1998). Changes in material properties due to the
low temperatures must be taken into account, however. Coefficients of friction are
affected by cryogenic temperatures, for instance. There is not much data available on
these effects (Weisend, 1998). Composite materials are also popular in cryogenic
technology; they can resist temperatures to 1.8ºK and have high strength and stiffness,
and low weight, among other advantages. They cost more, however, and are sometimes
difficult to manufacture (Weisend, 1998). The benefits of composites versus metals will
have to be considered more thoroughly.
There are also many different insulators that can be used at cryogenic temperatures and in
a vacuum. Many are made of synthetic foam rubbers; an example is K-Flex (Kopchenko,
2003). Again we must be concerned with the abrasive qualities of the regolith on the
rubber; different rubbers have different responses to abrasion. In general, if the rubber is
compounded with a filler, its resistance to erosion decreases (Besztercey, 1999). It
should not be too difficult to find an insulator that suits our purposes.
More research is needed into the appropriate materials for the lunar excavator system.
The above considerations are a foundation for that investigation. Nevertheless, the above
considerations are a foundation for further investigation into material selection.
43
3. PRELIMINARY CONCEPT OF OPERATIONS
Mission operations consist of robotic operations on the Moon and ground operations on
the Earth. Lunar operations include excavating and processing regolith, and are divided
into 3 phases: Initialization, Excavation, and Processing. In the following sections, we
develop each of these phases. Ground operations runs throughout the duration of the
mission and describes the process by which human operators interact with the landed
module. This will be addressed in subsequent design reports.
3.1 Initialization Phase
The Initialization Phase includes system checkout and calibration of sensors. Once the
robotic lander is situated in the permanently shadowed crater, it will spend up to two days
testing the communications, power, and excavation and processing systems. First it will
verify that the excavation system is in the pre-deployed configuration through the
Excavator System’s position sensors. Then it will check that all controls and regulation
sensors associated with the processing system (described in Section 1.7) are reporting
nominal pre-processing states. This includes no system heating, no hydrogen flow, and
pre-operational temperature and pressure readings.
Next, the lander will conduct a test of the processing systems. It will run through one
processing cycle without regolith loaded in the furnace. The furnace will heat up to
processing temperature, and the electrolyzer subsystem will warm to operating
temperature. Next, the lander will conduct a test of the hydrogen recycling system and
verify nominal pressure readings through the ISOPS system. Once this test is completed,
the lander will conduct a second test of the processing system and calibrate its sensors.
Finally, the lander will then conduct a test of the Excavation System by actuating all
motors and ensuring proper functioning. The test will end with the Excavation System in
the pre-deployed position so that the lander is capable of maneuvering to characterize the
landing site.
3.2 Excavation Phase
After initialization, preparations begin to spend the next 14 days excavating 100
kilograms of regolith. First, the lunar lander must characterize the landing area. This may
include taking 360-degree panoramic photographs. From these photographs, we will
document ten to twenty-five potential excavations areas which are likely to not impede
the functioning of the Drill. Path planning must then take place to detail how the lander
traversing from one drilling site to the next.
The lander then traverses to the first drilling site, and initiates peck-drilling. During
drilling, a sensor monitors the torque applied to the drill shaft and adjusts the forces
exerted on the drill accordingly. The torque feedback is crucial to avoid damaging the
Drill on rocks. Regolith is broken up by the Drill end, travels up the flute, and is
44
deposited in the Collection Bin. Once the Drill has either excavated regolith to a depth of
one meter or is impeded by rock, the Drill retreats to the pre-deployment configuration.
The lander then traverses to the next drill site, and the process repeats. The lander
continues excavating sites until either 100 kg of regolith has been collected or two weeks
have elapsed.
3.2 Processing Phase
Once the Excavation Phase has ended, the lander begins to process the regolith it has
collected. First, a small amount of regolith from the Collection Bin is released into the
Compression Chamber to measure bulk physical characteristics as described in Section
2.2. One batch of regolith (5kg, 10kg, or 20kg) is then released into the LoadingUnloading System for transfer to the Furnace. Once inside the Furnace, heating is
initiated. The regolith is heated to drive off any existing water, and the water-ice content
of a sample is measured as the change in mass of the regolith. Then, hydrogen flow and
recycling is initiated. The regolith is reduced using hydrogen, and oxygen yield is
measured as the additional change in mass of the regolith. The water vapor is then
condensed. Once the entire first batch has been processed, Furnace heating shuts off and
the electrolyzer begins operating. Oxygen is collected in the Oxygen Storage Tank.
As the water from the first batch is being electrolyzed, another small amount of regolith
from the Collection Bin is released into the Compression Chamber to measure bulk
physical characteristics. Then the second batch of regolith is loaded in the Furnace and
heating is initiated. From this time forward, heating/processing and electrolysis happen
concurrently. This processing cycle continues until all 100kg of regolith in the Collection
Bin have been processed.
45
4. OUTREACH UPDATE
1st Space Exploration Conference
Three design competition team members participating in LunarDREEM project research from
June-August 2004 presented a paper describing their summer work at the 1st Space Exploration
Conference, held in Orlando, Florida from 30 January – 1 February. This event provided team
members an opportunity to discuss their progress on the design competition with other
competition school and other members of the space community.
Classroom Activities
The LunarDREEM competition team has worked with local Cambridge Public Schools to
develop a classroom lesson that complements the Suns and Shadows curricula of grades 4, 5, and
6, and the Planetary Science curricula of grades 7 and 8 at the Tobin School. We worked closely
with the school teachers to develop of a presentation describing the scientific case for ice at the
poles of the moon. The presentation involves hands-on classroom activities, handouts, and an
assessment of the material presented. The team presented their lesson to the 4th and 5th graders at
the Haggerty School on March 24th, and will return to the school on March 29th to present to the
6th graders.
Future Outreach
The team plans to carry out classroom activities at the Tobin school and participate in their
Science Night in April 2005. Also, the team has agreed to make a presentation of their work
during the Space Grant-sponsored Massachusetts Space Day at the Boston Museum of Science in
the Fall of 2005. The team will work with museum personnel to set up a temporary exhibit of
their excavator apparatus, together with explanatory material showing the importance of ISRU
for future space exploration. Locally at MIT, the LunarDREEM team has volunteered to present
their work in late April/early May as a class lecture in the 16.S26 Freshman Seminar series on
“Modern Space Science and Engineering.”
46
REFERENCES
Answers.com, http://www.answers.com/outgassing&r=67. (Accessed 2005, March 17)
Besztercey, Gyula; Jozsef Karger-Kocsis, Pal Szaplonczay, and Ryuzo Kimata. “Erosive Wear of
Electrically Insulating Rubber Compounds by Solid Particles.” High Voltage Engineering, 1999,
Eleventh International Symposium on (Conf. Publ. No. 467). London, UK: 1999.
Chewonki, “Renewable Hydrogen Project, Advances in On-Site Electrolysis Hydrogen Generation
Technology”, http://www.chewonkih2.org/docs/PEM%20vs%20Alkaline.pdf, (accessed 2004,
November 20).
Elliott, Larry, Homebrew. “Fuel Cell and Hydrogen Electrolyzer”,
http://www.homepower.com/files/Hp85p52.pdf (accessed 2005, March 10).
Friebel, Virgil R. and James T. Hinricks. “Lubrication for vacuum applications. Journal of Vacuum
Science and Technology”. January 1975: Volume 12, Issue 1. pp. 551-554
Heiken G.; Vaniman D.; French B. Lunar Sourcebook – A Users Guide to the Moon. Cambridge
University Press, Cambridge, MA, 1991.
Kopchenko, P. V., G. I. Saidal, K. V. Plastinin, and B. A. Levin. “Reinforced Structures of
Cryoinsulation Based On the Synthetic Rubber K-Flex.” Chemical and Petroleum Engineering. Vol
39: Nos 9-10, 2003.
McKay, David S.; Allen, Carleton C., “Hydrogen Reduction of Lunar Materials for Oxygen
Extraction on the Moon”, AIAA meeting papers, paper 96-0488, 1996.
Neubert, J., Lunar Lander Propellant Production for Multiple Site Exploration Mission, MIT Masters
Thesis, 2004.
Ogata. System Dynamics (3rd edition), Pearson/Prentice Hall, Upper Saddle River, NJ, 2004.
Roller, K. G. “Lubricating of mechanisms for vacuum service”. Journal of Vacuum Science &
Technology A: Vacuum, Surfaces, and Films. May 1988: Volume 6, Issue 3. pp. 1161-1165
SGL Carbon Group, “PEM Fuel Cell Components”,
http://www.sglcarbon.com/sgl_t/img/fuelcell/cell.html (accessed 2005, March 10).
Shullman, Holly., “Microwave Heating Ceramics,” http://www.ceralinkus.com/publications/MicrowaveHeatingCeramics_Dec02.PDF, (accessed 2005, March 5).
Weisend, ed. Handbook of Cryogenic Engineering. Hamburg, Germany: Taylor and Francis, 1998.
47
 – an integrated")