grl53947-sup-0001-s01
advertisement

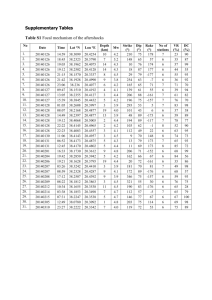
Geophysical Research Letters Supporting Information for Slip segmentation and slow rupture to the trench during the 2015, Mw8.3 Illapel, Chile earthquake Diego Melgar1, Wenyuan Fan2, Sebastian Riquelme3, Jianghui Geng4, Cunren Liang5, Mauricio Fuentes6, Gabriel Vargas7, Richard M. Allen1, Peter M. Shearer2 and Eric J. Fielding5 1 Seismological Laboratory, 2 University of California Berkeley, Berkeley, CA, USA Cecil H. and Ida M. Green Institute of Geophysics and Planetary Physics, Scripps Institution of Oceanography, University of California San Diego, CA, USA 3 Centro Sismológico Nacional, Universidad de Chile, Santiago, Chile 4 GNSS Center, 5Jet Wuhan University, Wuhan, China Propulsion Laboratory, California Institute of Technology, Pasadena, CA, USA 6Departamento de Geofísica, Universidad de Chile, Santiago, Chile 7Departamento de Geología, Universidad de Chile, Santiago, Chile Contents of this file Text S1-S2 Figures S1-S10 Table S1 Introduction This document contains supplementary text and figures on the data processing, inversion method, back projection techniques, and tsunami field survey data. Text S1 summarizes how the four data sets used in the inversion (GPS, strong motion, InSAR and tide gauges) were processed prior to the inversion. Text S2 details the kinematic source inversion process as well as the teleseismic back-projection 1 technique. Figures S1-S10 illustrate several aspects of these procedures such as data fits and resolution analyses. Finally, Table S1 contains the tsunami survey measurements. Text S1, data processing GPS: We processed 1-Hz continuous data for the day of the mainshock. Final satellite orbits, Earth Rotation Parameters (ERPs) and satellite clocks from CODE (Center for Orbit Determination in Europe) were fixed to estimate high-rate satellite clocks and 30s fractionalcycle biases (FCBs). We fix the orbits, clocks and ERPs to enable precise point positioning with ambiguity resolution (PPP-AR) to estimate epoch-wise positions. All position estimates are with respect to the International Terrestrial Reference Frame (ITRF2008) and are not contaminated by any displaced reference stations. No constraints between epochs are applied to the positions, while ZTDs are estimated as random walk parameters with a power density of 0.001 mm/s1/2. Integer ambiguity resolution is attempted at each epoch. Solid Earth tides, ocean tide loading and pole tide are applied and antenna phase center variations are also corrected. Strong Motion: Strong motion data were provided by the Centro Sismologico Nacional (CSN). Gain is removed from all the strong motion stations, the pre-event baseline is subtracted and the waveforms are trimmed at 180s length and decimated to 5Hz. We integrated the accelerograms to velocity and bandpass filtered between 0.02 and 0.5Hz for the inversion. InSAR: We used prototype additions to the ISCE software [Rosen et al., 2012] to process the Copernicus Sentinel-1A satellite InSAR data. The satellite acquires data in TOPS mode (Terrain Observation by Progressive Scans) to cover a 250 km wide swath. The data is processed in 7 slices of descending track 156 and 4 slices of ascending track 18. The descending pair was acquired on Aug. 24, and Sep. 17, 2015, and the ascending pair was acquired on Aug. 26, and Sep. 19, 2015. For the orbit data, we used the ESA POD Precise Orbit Ephemerides for the preearthquake acquisition, and POD Restituted Orbit for the post-earthquake acquisition. The interferograms were geocoded to the coordinates of 3 arc second SRTM DEM after filtering and phase unwrapping. Finally, the unwrapped interferograms are downsampled using the QuadTree algorithm [Lohman and Simons, 2005]. Tide Gauges: The tide gauge data is resampled to 60 second sample rate. Tides are removed by high-pass filtering the time series with a filter corner of 1 hour Text S2, source imaging methods Slip Inversion: We use the MudPy open source inversion code. We use the CSN hypocenter and the Slab 1.0 model [Hayes et al., 2012] to define the fault. We discretized it to 225 subfaults. Elastodynamic Green’s functions (GFs) were computed for every subfault/station pair using the frequency wavenumber integration technique. Static GFs are computed with the same code. Tsunami GFs are obtained by placing 1m of slip on each subfault and deforming the seafloor on a regular 0.05 by 0.05 degree grid. We then compute the tsunami propagation to each tide gauge using a non-linear shallow-water code [LeVeque et al., 2011]. To ensure linearity we use only the first wavelength of tsunami data at each tide gauge. We account for horizontal 2 advection of steeply sloping bathymetry. Joint inversion is carried out using the multi-time window method with three-knot splines as basis functions. Data weights are determined by trial and error. Initially each data-set is normalized and the relative weights are determined by studying the inversion residuals and ensuring that each data set is independently fit to the highest possible level. We allowed slip on nine 50% overlapping triangles with 4s rise-time. Spatial regularization is achieved though minimum norm smoothing. Temporal smoothing on the time windows is achieved with first-order forward finite differences. A key aspect of joint slip inversion is the selection of the relative weights for each data set. This is a topic of ongoing research and no clear objective way of determining them currently exists. Our strategy is as follows. We first assign equal weights to each data set by normalizing the data vector containing each kind of data. We invert and examine the residuals to each data set and adjust the data weights to improve the data fits on those datasets that are poorly fit in this initial inversion. We then re-run the inversion and examine the residuals once again and adjust the weights as necessary. This cumbersome procedure is repeated until we determine the fits to each data set are the best possible. We analyze the resolution of the slip inversion with the data weights and regularization values used for the final model in Figure S4. We generated a synthetic slip distribution and forward calculated the waveforms and static offsets it produces. We then added realistic noise and inverted each dataset. For the waveform noise we used white noise with variances computed from pre-event noise at each station. For the strong motion60s of pre-event noise at each strong motion stations we used 60s of pre-event noise, for the GPS sites we used 5minutes and for the tide gauges 20 minutes. For the InSAR data we performed a static inversion, while for the HR-GPS-only, strong motion-only and tsunami data-only as well as for the full joint inversion we performed a kinematic inversion with a maximum rupture speed of 2km/s as in the final model in the main text. The results in Figure S4 show the resolving power for each individual data set and how the best model is retrieved through joint inversion. Back-Projection: All teleseismic P-wave records were downloaded from IRIS (AZ, BK, CI, CM, CN, CU, G, II, IM, IU, IW, LD, MX, N4, NM, NU, OK, PR, PY, SC, SV, TA, UO, US, UU, UW). We apply back-projection (BP) to P-waves recorded at 30o to 90o epicentral distance in North and Central America. We performed BP in two different frequency bands with 2ed order Butterworth filter (high-frequency, HF, 0.5-2 Hz; low-frequency, LF, 0.02-0.5 Hz). We apply empirical time corrections based on waveform cross-correlation to remove time shifts due to 3D velocity variations [Houser et al., 2008] and implement Nth root stacking [Xu et al., 2009] to enhance signal-to-noise ratios. Potential sources are gridded at 5-km spacing at the hypocentral depth (19 km) within the latitude range -34.23o to -28.87o and longitude range 74.49o to -70.29o (600km by 400km). Vertical velocity recordings from 452 broadband stations (Supplementary Fig. 5) are back-projected to obtain the images. For both frequency bands we use waveform alignment from the first 5s cross-correlation of the high-frequency data. The records are weighted by signal quality, normalization factor fro alignment, and inversely weighted by station density within 4 degrees to simulate uniform station spacing. No postsmoothing or processing is applied. To estimate resolution, we processed four large aftershocks using the same procedure (Figures S9,S10). Depth phases or slab phases follow the direct P waves within 20s after the initial arrival. To suppress artifacts, we smooth our results using a moving 20s power stack. The back-projection images of these aftershocks show energy bursts concentrating around the epicenters and demonstrate the robustness of the image for the mainshock. 3 Figure S1. Strong motion recordings. Station names are indicated for each trace. Depicted are 200s starting at the event origin time of the north-south components of available strong motion data in the epicentral region. The total peak ground acceleration defined as the Cartesian norm of the instantaneous 3-component acceleration is denoted as a percentage of gravity (1g=9.81m/s2). The record at the closest station is truncated as the station was damaged due to the strong shaking, that data was not recovered before the event buffer was overwritten. 4 Figure S2. Waveform fits for different data sets. a) Fits to the high rate GPS data. b) Fits to the tide gauge tsunami measurements. c) Fits to the strong motion data integrated to velocity and bandpass filtered between 0.02 and 0.5Hz. Black lines are the data used in the inversion, red lines are the predictions (synthetics) of the resulting model. The text next to each waveform is the maximum observed value and the units are indicated above each panel. 5 Figure S3. InSAR data and inversion residuals. Line of sight (LOS) measurements for an ascending and a descending scene from the Sentinel-1A satellites. Look directions of the radar instrument for each scene are indicated by the black lines. The black contours are the slip inversion at 2m intervals. The epicenter is denoted by the blue star. The residuals are the result of the observed LOS minus that predicted by the inversion. The beachballs indicate large, Mw6.2-Mw7.0, that occurred before the data for the repeat pass was collected and partly explains the residual pattern. 6 Figure S4. Resolution tests. We generated a synthetic slip distribution and forward calculated the waveforms and static offsets it produces. We then added realistic noise and inverted each dataset using the same regularization and data weighting scheme discussed in text S1. This shows the sensitivity of each data set to different parts of the slip model. We also show the joint inversion results, which provide the best recovery of the input slip pattern. 7 Figure S5. 0.5-2 Hz P-wave velocity aligned with similarity coefficient (HF) for the Mw 8.3 mainshock. Back-projection for both frequency bands use the same alignments. The onset of the P wave begins at 0s. The station names are listed for every 10th station on the left side, with corresponding average correlation coefficients on the right side. The HF average correlation coefficient of the initial 5 s ranges from 0.62 to 0.97. Noisy recordings are down-weighted with their similarity coefficients when used for back-projection. No polarity shifts are allowed during the alignment. Initial lower-hemisphere P wave polarities are shown as insert. 8 Figure S6. Data fit as variance reduction to the 4 data sets used in the joint kinematic inversion as a function of maximum allowed rupture speed. The data fits shown here are for the fullyjoint inversion discussed in Text S1. Notice that InSAR, which is insensitive to rupture speed, is still affected by the choice of maximum rupture speed. This is because the final slip pattern will change as the maximum rupture speed changes, thus affecting the InSAR fits. 9 Stacked source time function (LF: 0.02~0.5Hz) Time-integrated back-projection 0.02 to 0.5 Hz 0 20 40 60 80 100 0 to 20s 20 to 40s 40 to 60s 60 to 80s 80 to 100s Normalized (LF) Absolute (LF) Time (s) Stacked source time function (HF: 0.5~2Hz) 0.5 to 2 Hz -30 0 20 40 60 80 100 Normalized (HF) Absolute (HF) Time (s) Latitude -31 -32 -33 0 1 Normalized energy -73 -72 -71 0 to 20s 20 to 40s 40 to 60s 60 to 80s 80 to 100s -70 Longitude Figure S7. Back-projection results. Upper panels: Low-frequency (LF, 0.02-0.5 Hz) timeintegrated back-projection image, stacked source-time function and time snapshots; Lower panels: High-frequency (HF, 0.5-2 Hz) time-integrated back-projection image, stacked sourcetime function and time snapshots. Stations used for the back-projection analysis are mapped in the upper left corner in Figure 2 in the main text. 10 Figure S8. Historical seismicity from the Centro Sismológico Nacional (CSN) catalogue between January 2005 and August 2015. 11 -30 Time-integrated back-projection (0.02 to 0.5 Hz) 0 Normalized energy -31 6.3 2015/9/26 2:51:18.2 o o -30.82 /-71.39 /38.1km 2015/9/22 7:12:59.9 o o -31.48 /-71.2 /54.3km 6.1 Latitude -32 Time-integrated back-projection (0.5 to 2 Hz) 1 6.3 6.1 2015/9/19 12:52:19.8 -32.33o/-72.09 o/10.6km 2015/9/21 5:39:33.5 -31.59o/-71.71 o/22.8km PDE hypocenters GCMT Locations -33 -74 -73 -72 -71 -70 Longitude Figure S9. Time-integrated back-projection images for four aftershocks of both frequency bands. The aftershocks have different depth (from 10.6km to 54.3 km) as listed in the right panel. The energy bursts are mostly centered around the hypocenter without artifacts. The elliptic shaped energy contours are due to the array geometries. 12 Figure S10. 0.02-0.5 Hz aligned velocity records for the four aftershocks. The depth phases and core phases are labeled as colored crosses. The onset of the P wave begins at 0s. The station names are listed for every 5th station on the left side, with corresponding epicentral distances on the right side. The shallower aftershock (2015/09/19) shows complicated P-waves, which might be modulated by the slab. The deep aftershocks (2015/09/22 and 2015/09/26) have wellseparated depth phases. In either case, with 20s stacking window, we do not observe any artifacts in our back-projection results. 13 Table S1. Tsunami run-up measurements after correction for tides. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 Longitude (S) -71.47424 -71.535304 -71.513554 -71.513566 -71.521082 -71.518942 -71.55445 -71.5696 -71.593265 -71.643059 -71.667284 -71.662806 -71.662034 -71.700964 -71.69937 -71.69436 -71.68796 -71.6899 -71.660978 -71.658327 -71.657232 -71.477583 -71.403223 -71.350687 -71.321624 -71.33604 -71.274496 -71.292492 Latitude (W) -32.33457 -32.135242 -32.026045 -31.932249 -31.923235 -31.912248 -31.638362 -31.51137 -31.422602 -31.217328 -31.164106 -31.146089 -31.145131 -30.734914 -30.54835 -30.54667 -30.49823 -30.49392 -30.305566 -30.305928 -30.288377 -30.231703 -30.015713 -29.980363 -29.960852 -29.953128 -29.905819 -29.824801 Run-up (m) 3.1 3.9 4.9 5.5 5.5 5.4 5.9 4.1 5.3 4.4 4.4 4.1 4.0 4.6 6.7 8.7 10.4 11.4 6.1 8.1 4.6 3.9 5.4 3.0 6.2 6.5 3.0 2.0 Uncertainty (m) 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 1 1 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 References Hayes, G.P., D.J. Wald, R.L. Johnson, (2012). Slab1. 0: A three‐dimensional model of global subduction zone geometries, J. Geophys. Res., 117. 14 Houser, C., G. Masters, P. Shearer, and G. Laske, (2008). Shear and compressional velocity models of the mantle from cluster analysis of long-period waveforms, Geophys. J. Int., 174, 195–212. LeVeque, R.J., D.L. George, M.J. Berger, (2011). Tsunami modeling with adaptively refined finite volume methods, Acta Numerica, 20, 211-289. Lohman, R.B., Simons, M., (2005). Some thoughts on the use of InSAR data to constrain models of surface deformation: Noise structure and data downsampling, Geochem. Geophys. Geosyst, 6, 12. Rosen, P. A., E. Gurrola, G. F. Sacco, and H. Zebker, (2012). The InSAR scientific computing environment, Proc. EUSAR, Nuremberg, Germany, Apr. 23–26 , 730– 733. Xu, Y., K. D. Koper, O. Sufri, L. Zhu, and A. R. Hutko, (2009). Rupture imaging of the Mw 7.9 12 May 2008 Wenchuan earthquake from back projection of teleseismic P waves, Geochem. Geophys. Geosyst., 10, Q04006. 15