FUNDAMENTALS OF ENGINEERING MECHANICS

FUNDAMENTALS OF ENGINEERING MECHANICS basic concepts, methods and problems
(based on Engineering Mechanics by J.L. Meriam and L.G. Kraig)
(drawings copied from the above)
I. INTRODUCTION
1.1. Mechanics
Mechanics is a science on the motion. It is the oldest physical sciences, developed through astronomical observation (Copernicus, Keppler) and free fall experiments (Galileo). Results of this discoveries were generalized by Newton, who expressed laws of the motions as principles - i.e. laws constituted Mechanics as mathematical, deductive science with some primary terms and principles.
1.2. Fundamental Concepts and Quantities of Mechanics:
Space
–
3-D geometrical region, where objects (particles, bodies) are placed and move (i.e. change positions). The measure of the size of a physical system and of the distances between objects is known as a length. The position of a point in space can be determined relative to some reference point by using linear and measurement with respect to a coordinate system whose origin is at the reference point.
Time
– abstract concept used to define the events simultaneity. In other words the measure of interval between two events.
Matter
– any substance that occupies space. A body is a matter bounded by a closed surface.
Masse
– the measure of the quantities of a matter. Mass is also the measure of the inertia defined in its turn as body’s resistance to a change in motion.
Force
– abstract concept used to measure the (intensity of an) action between two bodies resulting in change in their motions.
Particle
– object without shape or size, but having a mass. The model of the real body moving in distances much larger the its size.
Rigid body
– collection of particles, whose relative distances are constant.
1.3. Principles of mechanics
(Newton’s Laws - 1687):
1.
In the absence of external forces, a particle originally at rest or moving with a constant velocity will remain at rest or continue to move with a constant velocity along a straight line.
2.
If an external force acts on a particle, the particle will be accelerated in the direction of the force and the magnitude of the acceleration will be proportional to the force an inversely proportional to the mass of the particle.
3.
For every action there is an equal and opposite reaction. The forces of action and reaction between contacting bodies are equal in magnitude, opposite in direction and collinear.
4.
Different forces acting on a particle simultaneously act independently on each other and their result are also independent. Two forces can be replaced by the equivalent
(having the same effect) force (resultant) determined by the parallelogram.
5.
Law of Gravitation: two particles of mass m and
1 m at the distance r attracts
2 mutually with the force proportional to the product m
1 m
2 and inversely proportional to the square of the distance;
1.4. Vectors
In Mechanics - as in all physical sciences and engineering fields - any experiments, study, research are performed expressing properties of objects and processes with numbers . In such a modeling we use physical quantities, which are abstract terms chosen (invented, selected ) during the development of the science. A physical quantity must have its experimental manifestations which serve to compare different objects and phenomena in given aspect.
All mechanical states and phenomena can be defined and described using two kinds of quantities: scalars and vectors.
Physical and geometrical interpretation of vector quantity
1.
Characteristics of a vector:
magnitude,
slope (line of action),
sense,
point of application
2.
Types (classification) of vectors:
free vectors – vectors whose point of application can be placed anywhere and line of action can be shifted in parallel in the space in the space.
sliding vectors – vectors whose point of application can be placed anywhere on its line of action.
fixed vector - vectors with defined point of application and line of action.
Analytical interpretation of vector quantity
In mathematics are considered as free vectors.
For analytical operations sometimes it is comfortable to split into two factors concerning: magnitude and direction (sense, slope): a
- magnitude of the vector a
a a o
(1.1) a o
- unity vector of the same sense and slope as
a
(vector
a
normalized to 1)
Algebraically a vector can be defined as the triplet of numbers whose meaning depends on the coordinates applied in given case. In Cartesian coordinate system: a
a x a y a z
, (1.2)
Where a x
, a y
, a z are orthogonal projections (scalar components) of
a
Another form can build up as the sum of three orthogonal vectors - rectangular components a
a x
a y
a z (1.3)
The above can also expressed using scalar components and unity vectors of axes: i, j, k
a
i a x
j a y
k a z (1.4)
Another useful form is:: a
a
cosα cosβ cosγ
(1.5) where unity vector of the same sense and slope the vector’s line of action: o a is expressed through the cosines of the direction of a o a o
i cos
cosα
j cos cosβ
cosγ
k cos
(1.6)
(1.7)
Fig. 1.1
Specifying and expressing a vector
Vectors may be expressed:
either in geometry through parameters of the forms (1.1) and (1.5)
or in algebra through parameters of the form (1.4)
In practical problems vectors are given straight – through values of the parameters suitable for the chosen form or through an equation, which the vector must satisfy.
Problem : Define the vector in both ways (in geometry and in algebra) which is span between two diagonal vertexes of the given rectangular prism:
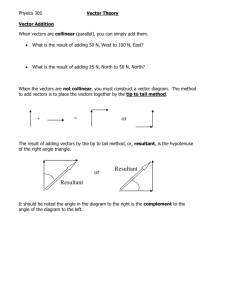
Algebraic operations with vectors:
Addition – parallelogram rule
Fig. 1.2
Subtraction
Fig. 1.3
Dot (scalar) product:
Cross (vector) product:
II. FORCES
2.1. Classification of forces
Force is the term used to model an attempt (effort) to move a body (to change its motion). It is evident in case of contact forces. In this aspect another kind of forces are field forces (distant action).
Forces exerted at a body (a particle) are called external forces to distinguish them from internal forces which are exerted between particles of the body to keep it rigid. Usually external forces are concentrated forces and internal – distributed forces .
Particular kind of forces come from mechanical ties (constraints of the body motion relative to other bodies), which can take form of e.g. a revolute joint, a support, a sliding guide. That is a sort of external forces, called reaction forces.
A force is sliding vector – i.e. it obey the principle of transmissibility: external effect of a force is the same for all points of application of the force along its line of action.
2.2. Force systems
STATICS deals with the set of forces composed from load forces and reaction forces. For an alone bode we construct so called free body diagram (FBD) – the body of interest, separated from all other bodies and motion constrains, whose actions is replaced by forces corresponding to the kind of this actions
Methods used in statics depend on the properties of the forces set.
Concurrent (space and coplanar) forces
Fig.2.1
Parallel forces
Fig. 2.2
Moment of a force about a point
Fig. 2.3
Varignon’s theorem:
The moment of a force about a point is equal to the sum of the moment of this force’s component about the same point .
Couple of forces
Fig. 2.4
Force shift theorem
Couple of forces allows to shift the line of force’s action – see Fig. . The theorem of parallel shift of a forces states, that a force can be shifted in parallel way to the distance d applying the zero set (-F,F) at this system. Then replacing the couple (F,-F
’
) by the moment M = Fd we obtain the force-couple system equivalent to the original force.
Fig.2. 5
III. RESULTANT
The resultant of a force system is the simplest set of forces which has the same effect as the original one.
The resultant is described as force-couple system to stress two aspects of the equivalency between the resultant and the original system: equivalency in respect to forces and in respect to moment of forces.
The simplest case is, when the original set consists of concurrent forces. The resultant force can be found by subsequent addition:
Note, that the resultant’s line of action passes through the center C of the original set.
Resultant can be calculated algebraically:
Fig. 3.1
In a general case (no concurrent) of forces procedure of subsequent addition may yield two not intersecting (parallel or twisting) forces. If the remaining forces are parallel, they can be:
equal, but opposite; then there is a couple of forces, which can be replaced only by another couple of forces, having the same moment
not equal so that they can be substituted by one force with the specific line of action, found according to the procedure shown in Fig. ….
To reduce two twisting (non parallel in space) forces first we make them intersect by shifting one of them and introducing suitable moment of force. Then adding two – now intersecting – forces we get one resultant force, which together with the moment of shifted force constitute the resultant set force-couple.
Any set of arbitrary forces can be reduced to given point ( center of reduction ) in the general procedure yielding force-couple system R-M
O
R
M
o
F i d i
F i
First of this equation is referred as algebraic method - the subsequent transformation of the original set of forces according to the rule of adding and shifting the forces
Fig. 3.2
In the second of the above equation we apply principle of moments: the moment of the resultant about any point equals the sum of the moments of the original forces of the systems about the same point
Fig. 3.3