Computational reduction of motion estimation using quadrant search
advertisement

Computational reduction of motion estimation using quadrant
search for fast video encoder
Jong-Nam Kim and Byung-Ha Ahn
Dept. of Mechatronics, K-JIST 1, Oryong-dong, Buk-ku, Kwangju 500-712, Korea
jnkim@moon.kjist.ac.kr, bayhay@kjist.ac.kr
Abstract –Among many modified TSS algorithms, new three-step search (NTSS) algorithm obtains good
picture quality in predicted images with more reduced computation on the average. This paper suggests
the new search algorithm with the computational reduction, which uses the UESA, PDE, qudrant search
strategy. The proposed algorithm reduces the useless computations combining above concept and keeps
the same quality of predicted image compared with the conventional NTSS algorithms. Our algorithm
uses NTSS scheme and PDE to remove useless computations in getting the best matched block.
Additionally, we apply the quadrant based search scheme to increase the efficiency of PDE with the
concept of UESA. Unlike other fast modified NTSS algorithms, our algorithm obtains lossless predicted
image compared with one of original NTSS algorithm. Experimentally, our algorithm showed reduced
checking rows for each block compared with the conventional NTSS, while keeping the same PSNR as
that of it. Therefore, our work will be useful for the applications requiring fast video encoder.
Keywords-- NTSS, PDE, and quadrant search
Introduction
Motion estimation plays a key role for the
compression of moving picture data. For the motion
vector in motion estimation, block matching
algorithms (BMA) of many estimation techniques
are most appropriate in the framework of
generation coding. A straightforward BMA is the
full search (FS) which exhaustively searches for the
accurate motion vector. This algorithm searches all
locations in a specific search range and selects the
position where the residual error of block matching
is minimized. The heavy computational load of the
FS, however, can be a significant problem in real
time video coding. Many fast algorithms for the
reduction of computation have been developed in
the last decade. We can classify these fast
algorithms into several groups, which are the
techniques based on UESA, the methods found on
multiresolution, the means built on spatial/temporal
correlation of the motion vectors, the fast
algorithms with sub sampling of matching block,
etc. [1]-[3].
The fast motion estimation techniques based on
UESA mainly constrain the number of checking
points by applying this assumption to matching
block. UESA means that the residual error of block
matching increases monotonically when the
checking point moves away from the location of the
global minimum error. So many algorithms based
on this concept have been reported for last decade.
These techniques have one fault that the search
could fall into a local minimum, which is not the
optimal motion vector. It has been reported that
these search algorithms could reduce the
computational requirement significantly. Among
these fast algorithms, TSS is the most popular
algorithm and recommended by RM8 of CCITT
and SM3 of MPEG due to its simplicity, regularity
and reasonable performance [2]-[6].
The goal of this work is to reduce the
computational complexity in the motion estimation,
while keeping the same error performance as that of
the NTSS which has good error performance
compared with TSS and modified TSS algorithms.
This paper proposes the new search algorithm with
the reduction of checking points, which uses the
UESA, PDE (partial distortion elimination) [3],
quadrant search strategy. The proposed algorithm
reduces the useless computations combining above
concept and keeps the quality of predicted image
compared with the conventional NTSS algorithms.
New three-step search (NTSS) algorithm obtains
good picture quality in predicted images with more
reduced computation on the average. To reduce
more the computation while keeping the same as
error performance compared with NTSS, this paper
proposes a fast NTSS algorithm using UESA, PDE
and quadrant search algorithms. Our algorithm uses
PDE to remove useless computations in getting the
best matched block. Additionally, We apply the
quadrant based search scheme to increase the
efficiency of PDE. Experimentally, our algorithm
showed reduced checking rows for each block
compared with the conventional NTSS, while
keeping the same PSNT as that of it.
checking points for big motion images. In that case,
nine inner checking points are unnecessarily
consumed. Meanwhile, eight outer checking points
are used inefficiently in the small motion. At the
worst case, it has thirty three checking points with
the search range (P=7). It is reported that built on
the center-biased motion vector distribution, the
NTSS algorithm results in improved error
performance over other modified TSS algorithms
[4].
This paper is organized as follows. Section 2
explains the conventional fast algorithms based on
the concept of UESA as the previous works.
Section 3 describes the proposed algorithms of
quadrant search using UESA and PDE to reduce
the computational complexity and keep the error
performance over the conventional NTSS algorithm.
In section 4, simulation results and discussions are
shown. Finally, the conclusion is followed in
section 5.
FTSS keeps the structure of three-step search, while
reducing checking points among the candidates.
FTSS reduces more the checking points than that of
ESS algorithm. It considers more cases after
checking three points for each step to reduce
efficiently checking points. It was shown that the
FTSS algorithm could further speed up the TSS by
a factor of two and half experimentally and keep
good performance comparable with the TSS. It was
reported that the FTSS algorithm employed almost
ten points for each block, which is the minimum
checking point in all modified TSS algorithms. But
it results in degraded error performance in complex
images compared with that of TSS [2].
Conventional Fast Algorithms Using UESA
Before developing our main algorithm based on
UESA, we refer to several popular algorithms using
UESA. The popular algorithms based on this
concept include the three-step search (TSS), the
new three-step search (NTSS), the four step search
(FSS), the conjugate directional search (CDS), oneat-a-time search (OTS), the 2-D logarithm search
(2-DLOGS), 1-D full search (1-DFS), the parallel
hierarchical one-dimensional search (PHODS),
efficient-simple search (ESS), fast TSS (FTSS), and
their modified algorithms [2]-[13]. It is reported
that the NTSS algorithm in the above algorithms
has the best prediction quality with reasonable
checking points. We’ll summarize selectively
several algorithms in the above ones for the
background of the work.
TSS has unnecessarily many checking points when
the motion is small for the block. Therefore a new
three-step search (NTSS) algorithm was proposed
for small motioned images by R. Li et. al [4]. The
features of NTSS are that it uses a center-biased
checking pattern, which employs seventeen
checking points in the first step unlike TSS
algorithm, and takes the adaptive search to the
distribution of the motion vector. The adaptive
search means that half-stop is possible in the first or
second step when motion vector is in the range of
(±1, ±1). However, the algorithm has unnecessary
Proposed Algorithm
As described previously, new three-step search
(NTSS) shows very good error performance with
reasonable computation on the average. But, it can
require more checking points compared with the
computation of TSS at the worst case. Additionally,
it often consumes useless checking points for a
little big motioned-block. We want to reduce the
useless computations while keeping the same
prediction quality as that of NTSS in motion
compensated images. To do so, we selectively
check initial some candidates,then continue the
search according to the result.
J.N. Kim and et al. [12]-[13] reduced the average
checking points using conditional search strategy. It
first examines one or nine checking points of
seventeen checking points in the NTSS with fixed
threshold of SAD which is predefined. The
algorithm is very effective in reducing the average
checking points, but its prediction quality heavily
depends on the fixed threshold of SAD.
Additionally, with one checking point at first,
predicted image quality was degraded by that of
TSS accompanying increased average checking
points. The problems was originated from the fixed
threshold of SAD and initially too small checking
point. So, we propose lossless NTSS compared
with the origianl NTSS algorithm. Of course, this
approach has the less computational reduction
compared with methods [12]-[13].
In the proposed algorithms, we want to find the
minimum error point as fast as possible. By doing
so, we can elliminate the unnecessary computations
without any degradation of PSNR in the predicted
image. From the concept, we propose our algorithm
which first checks the candidate with higher
probability of minimum checking error.
-7
-7
0
0
7
1
2
3
4
5
6
7
8
9
7
: 1st step
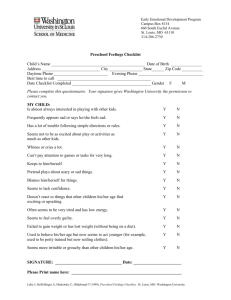
Fig. 1.
Candidate checking points in each step.
Fig. 1 represents nine candidates for each step. our
proposed algorithm which has almost same average
checking points as NTSS. In our algorithm, The
important thing is to find minimum error point for
each step. To do that, we will employ other search
strategy rather than sequential search such as 1~9
from the Fig. 1. That is, based on the probability of
minimum error point we examine the candidates.
Table 1 ~ Table 3 shows our search strategy which
is not conventional sequential search. Table 1
explains 2D cross search based NTSS algorithm. It
checks five candidates at first, then carries checking
additional four points according to the minimum
points from the first step. For example, if the point
9 is minimum error point, SAD (8) or SAD(6) will
be minimum. Then we will check first the point 9
than the point 1 or the point 3 or the point 7. Of
course, if the point 1 or the point 3 is minimum
point, we must take more the computational time.
But based on probability, our algorithm will be
encountered first for the minimum point in more
cases.
Table 2 shows 1D cross NTSS based search
algorithm, which checks at first three points such as
4, 5 and 6 in Fig. 1. According to the the result, we
continue checking the candidates. It has simpler
search rule than Table 1. Table 3 represents
Quadrant NTSS based search algorithm, which has
three checking points (5, 6 and 8) at the first step.
As shown in the talbe, it includes the algorithm of
Talble 1. Its search rule is more complex than Table
1 and Table 2. Table 4 ~ Table 6 apply above the
concept to lossy TSS algorithm. Unlike the
previous tables with lossless predicted images
compared with the original NTSS, they has
degraded prediction quality compared with the
origianl TSS algorithm. Instead, they reduce the
checking points significantly, which is about two
times.
Table 1. Lossless 2D Cross NTSS based search algorithm
First sub-step:
check SAD(2), SAD(4), SAD(5), SAD(6), and
SAD(8)
Second sub-step:
If
SAD(2) or SAD(5) is minimum
then check the points as the order: 1 -> 3 -> 7 -> 9 & select min{SAD(x)}
elseif SAD(8) is minimum
then check the points as the order: 7 -> 9 -> 1 -> 3
& select min{SAD(x)}
elseif SAD(4) is minimum
then check the points as the order: 1 -> 7 -> 3 -> 9
& select min{SAD(x)}
elseif SAD(6) is minimum
then check the points as the order: 3 -> 9 ->1 -> 7
& select min{SAD(x)}
End
Table 2. Lossless 1D Cross NTSS based search algorithm
First sub-step:
check SAD(4), SAD(5), and SAD(6)
Second sub-step:
If
SAD(4) is minimum
then check the points as the order: 1 -> 7 -> 2 -> 5 -> 3 -> 9 & select min{SAD(x)}
elseif SAD(5) is minimum
then check the points as the order: 2 -> 5 -> 3 -> 9 -> 4 -> 7
& select min{SAD(x)}
elseif SAD(4) is minimum
then check the points as the order: 3 -> 9 -> 2 -> 5 -> 1 -> 3 & select min{SAD(x)}
End
Table 3. Lossless Quadrant NTSS based search algorithm
First sub-step:
check SAD(5), SAD(6), and SAD(8)
Second sub-step:
If
SAD(8) < SAD(6) < SAD(5)
then check the points as the order: 9 -> 7 -> 3 -> 3 -> 2 -> 1
& select min{SAD(x)}
elseif SAD(6) < SAD(8) < SAD(5)
then check the points as the order: 9 -> 3 -> 2 -> 1 -> 4 -> 7
& select min{SAD(x)}
elseif SAD(5) < SAD(8) & SAD(5) < SAD(5)
then apply 2D Cross NTSS algorithm
End
Table 4. Lossy 2D Cross TSS based search algorithm
First sub-step:
check SAD(2), SAD(4), SAD(5), SAD(6), and
SAD(8)
Second sub-step:
If
SAD(2) is minimum
then check the points as the order: 1 -> 3 & select min{SAD(x)}
elseif SAD(8) is minimum
then check the points as the order: 7 -> 9 & select min{SAD(x)}
elseif SAD(4) is minimum
then check the points as the order: 1 -> 7 & select min{SAD(x)}
elseif SAD(6) is minimum
then check the points as the order: 3 -> 9 & select min{SAD(x)}
End
Table 5. Lossy 1D Cross TSS based search algorithm
First sub-step:
check SAD(4), SAD(5), and SAD(6)
Second sub-step:
If
SAD(4) is minimum
then check the points as the order: 1 -> 7 & select min{SAD(x)}
elseif SAD(5) is minimum
then check the points as the order: 2 -> 5 & select min{SAD(x)}
elseif SAD(4) is minimum
then check the points as the order: 3 -> 9 & select min{SAD(x)}
End
Table 6. Lossy Quadrant TSS based search algorithm
First sub-step:
check SAD(5), SAD(6), and SAD(8)
Second sub-step:
If
SAD(8) < SAD(6) < SAD(5) or SAD(6) < SAD(8) < SAD(5)
then check the points as the order: 9 & select min{SAD(x)}
elseif SAD(8) < SAD(5) < SAD(6)
then check the points as the order: 7 -> 4 & select min{SAD(x)}
elseif SAD(6) < SAD(5) < SAD(8)
then check the points as the order: 3 -> 2 & select min{SAD(x)}
elseif SAD(5) < SAD(8) & SAD(5) < SAD(5)
then apply 2D Cross TSS algorithm
End
Experimental Results and Discussions
To prove the performance of the proposed
algorithm in this paper, we use 100 frames of
“Foreman”, “Car phone” , “Claire”, “Trevor”,
“Grandmother”, and “Akio” image sequences. In
these sequences, “Foreman” and “Car phone” have
big motions compared with other image sequences,
while “Akio” is almost inactive sequence compared
with the two sequences. The proposed algorithms
are compared with the original New Three-Step
Search (NTSS) algorithm, Three-Step Search (TSS)
algorithm, its lossy modified algorithm, and full
search (FS) algorithm. The block size is 16 by 16
pixels and the search range is ±7 pixels. Image
format is QCIF (176 by 144) for each sequence and
only forward prediction is used. SAD as error
criterion for finding motion vector is employed.
The simulation results are shown in terms of PSNR
and average checking points and row.
Table 1. Experimental results for Average Checked Rows with various lossless NTSS based algorithms for 30 Hz
Seqs
Foreman
Car phone
Trevor
Claire
Akio
Grand
Algs
Spiral NTSS
7.1744
6.9673
5.5742
6.2807
2.7952
5.3411
1D Cross NTSS
7.0994
6.9732
5.4957
6.2741
2.7875
5.3436
Cross NTSS
6.8486
6.7773
5.4499
6.2706
2.7897
5.2844
Quadrant NTSS
7.0457
6.7732
5.4574
6.2803
2.7926
5.3265
Table 2. Experimental results for PSNR with various lossless NTSS based algorithms for 30 Hz
Seqs
Foreman
Car phone
Trevor
Claire
Akio
Grand
Algs
[dB]
[dB]
[dB]
[dB]
[dB]
[dB]
FS
34.4384
33.4491
33.2838
41.2994
42.3456
42.2903
TSS
33.8478
33.2423
33.2130
41.2954
42.3456
42.2799
1D Cross TSS
33.3158
33.0072
33.0501
41.2624
42.3448
42.2453
Cross TSS
33.5092
33.0767
33.0884
41.2800
42.3456
42.2721
NTSS
34.3382
33.4086
33.2655
41.2994
42.3456
42.2882
Algs
Table 3. Experimental results for Average Checking Points with various algorithms for 30 Hz
Seqs
Foreman
Car phone
Trevor
Claire
Akio
Grand
FS
TSS
1D Cross TSS
Cross TSS
NTSS
225
25
13
14.0778
19.5257
225
25
13
14.0736
19.5926
225
25
13
13.5160
17.9649
225
25
13
13.0808
17.1409
225
25
13
13.0375
17.0505
225
25
13
13.1975
17.4507
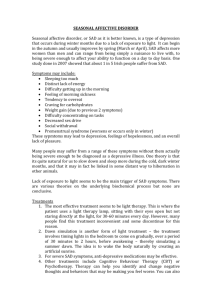
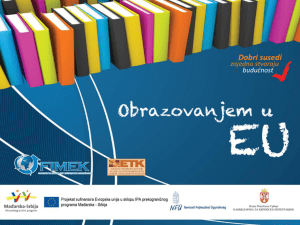
Avg. Checking Rows for "Foreman" with 30Hz
Avg. Checking Rows for "Car Phone" with 30Hz
10
9.5
only spiral NTSS
spiral& 1D cross NTSS
spiral& 2D cross NTSS
spiral & quadrant NTSS
9
Avg. Checking Rows
Avg. Checking Rows
8.5
only spiral NTSS
spiral& 1D cross NTSS
spiral& 2D cross NTSS
spiral & quadrant NTSS
9
8
7.5
7
6.5
8
7
6
6
5
5.5
5
4
0
10
20
(a) For
30
40
50
60
Frame Number
70
80
90
100
‘Car phone’ sequence
0
10
20
30
(b) For
40
50
60
Frame Number
70
80
90
100
‘Foreman’ sequence
Fig. 2. Average checking rows for each frame with ‘Car phone’ and ‘Foreman’ sequences
Table 1 shows average checking rows with various
lossless NTSS based algorithms for 30 Hz. In the
table, Our algorithms get more the computational
reduction than the spiral NTSS algorithm. Of
course, spiral NTSS algorithm reduces more the
computations than not-spiral NTSS one. In our
algorithm, “Cross NTSS” algorithm shows the least
computation for motion estimation for all
sequences. Table 2 shows average PSNR of the
variety of algorithms. As we predicted, NTSS
obtains good PSNR over other TSS kinds. Surely,
FS has the best performance in the PSNR. Table 3
represents the average checking points with various
algorithms. Especially, Cross TSS algorithm shows
the good performance in terms of PSNR and
average checking points. As compared with Table 2,
NTSS has better PSNR with less checking points
than TSS algorithm. From the results, most
sequences have the motions around (0,0). From
Table 1, we can see that our algorithm requires only
about 18 ~ 43 % computations compared with that
of the original NTSS algorithm. Fig. 2 shows
average checking rows for each frame with “Car
Phone” and “Foreman” sequences. In the figure, 2D
cross NTSS based search algorithm shows the most
reduction of the computations for motion
estimation.
Conclusions
In this paper, the proposed algorithm was described
to reduce the computation complexity using UESA
based quadrant search and PDE. Our algorithm at
first uses NTSS scheme and PDE to remove useless
computations in getting the best matched block.
Then, we apply the quadrant based search scheme
to increase the efficiency of PDE with the concept
of UESA. Unlikely conventional modified NTSS
algorithms, our algorithm keeps lossless predicted
image compared with one of original NTSS
algorithm. Experimentally, our algorithm showed
reduced checking rows for each block compared
with the conventional NTSS, while keeping the
same PSNR as that of it. Therefore, our work will
be contributed to the applications for fast video
encoder.
References
[1]. F. Dufaux, and F. Moscheni, “Motion
Estimation Techniques for Digital TV: A Review
and a New Contribution,” Proceedings of the IEEE,
vol.83, no.6, pp.858-876, June 1995.
[2]. J.N. Kim, and et al., “A fast three-step search
algorithm with minimum checking points using
unimodal error surface assumption,” IEEE Trans.
Consumer Electronics, vol. 44, no. 3, pp. 638-647,
August 1998.
[3]. J.N. Kim, and et al., “A fast motion estimation
for software based real-time video coding,” IEEE
Trans. Consumer Electronics, vol. 45, no. 2, pp.
417-426, May 1999.
[4]. R. Li, B. Aeng, and M.L. Liou, “A new threestep search algorithm for block motion estimation,”
IEEE Trans. Circuits Syst. Video Technol., vol. 4, no.
4, pp. 438-442, August 1994.
[5]. L.G. Chen, W.T. Chen, Y. Sjehng, and T.D.
Chiueh, “An efficient parallel motional algorithm
for digital image processing,” IEEE Trans. Circuits
Syst. Video Technol., vol. 1, no. 4, pp. 378-385,
September 1991.
[6]. L.M. Po, and W.C. Ma, “A novel four-step
search algorithm for fast block motion estimation,”
IEEE Trans. Circuits Syst. Video Technol., vol. 4, no.
3, pp. 313-317, June 1996.
[7]. J. Lu, and M.L. Liou, “A simple and efficient
search algorithm for block-matching motion
estimation,” IEEE Trans. Circuits Syst. Video
Technol., vol. 7, no. 2, pp. 429-433, April 1997.
[8]. J.N. Kim and et al., "Reduction of checking
points using unimodal error surface assumption for
fast motion estimation," Proc. SPIE, pp. 124-134,
July 1998.
[9]. M. R. Pickering, J. F. Arnold, and M. R. Frater,
“An adaptive search length algorithm for block
matching motion estimation,” IEEE Trans. Circuits
Syst. Video Technol., vol. 7, no. 6, pp. 906-912,
December 1997.
[10]. B. Liu, and A. Zaccarin, “New fast algorithms
for the estimation of block motion vectors,” IEEE
Trans. Circuits Syst. Video Technol., vol. 3, no. 2,
pp. 148-157, April 1991.
[11]. J.N. Kim and et al., "Efficient and adaptive
three-step search (EATSS) algorithm using adaptive
search strategy, unequal subsampling and partial
distortion elimination," Proc. SPIE, pp. 666-675,
Jul. 1999.
[12]. J. N. Kim and et al., "A fast new three-step
search algorithm for motion estimation using UESA
and adjacent SADs," Proc. IEEE ISCE, pp. 224-229,
Nov. 1999.
[13]. J. N. Kim and et al., "Fast Block Matching
Algorithm Using Threshold-based Half Stop, Cross
Search and Partial Distortion Elimination,” Proc.
SPIE, pp. 844-852, Feb. 2000.