and C-band Channel Measurement and Modeling Update
advertisement

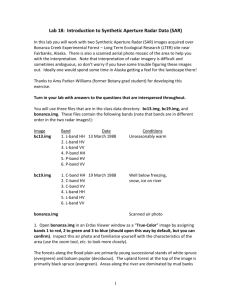
International Civil Aviation Organization ACP WG-F/31 IP02 AERONAUTICAL COMMUNICATIONS PANEL (ACP) 31st MEETING OF WORKING GROUP F Seattle, Washington, USA 6-10 October, 2014 Agenda Item 10: Any Other Business L-Band and C-Band Air-Ground Channel Measurement & Modeling Update (Prepared by David Matolak, Kurt Shalkhauser and Robert Kerczewski) (Presented by Robert Kerczewski) SUMMARY This information paper is intended to provide an update to ICAO WG-F of the progress of L-Band and C-Band air-ground channel model development based on data gathered through a propagation flight measurement campaign performed by NASA. The L-Band and C-Band frequencies being modeled will support the line-of-sight Control and Non-Payload Communications (CNPC) for unmanned aircraft systems. An update on the development of over-water channel models and initial results for hilly terrain are presented. 1. INTRODUCTION 1.1 The National Aeronautics and Space Administration (NASA) has been conducting airground (AG) channel propagation measurement and modelling for two frequency bands proposed for use by Unmanned Aircraft Systems (UAS) Control and Non-Payload Communications (CNPC), under NASA’s UAS Integration in the National Airspace System Project. Information papers presented at previous meetings of Working Group F have provided: a description of plans to conduct a series of flight tests to measure the propagation characteristics of the air-ground (AG) channel at 960-977 MHz and 5030-5091 MHz and use the resulting data to enable the development of detailed AG channel models (ACP-WG-F/25 WP 13, ACP-WG-F/26 IP8); the propagation measurement system and channel modelling approach (ACP-WG-F/28 IP3); a description of the first four sets of flight tests (ACP-WGF/29 IP 5); and initial analysis of channel measurement data and channel model elements for over-sea terrain condition (ACP-WG-F/30 IP 8). ACP WG-F31 IP02 -2- 1.2 Recent work on the air-ground (AG) channel characterization process has focused on several tasks including data processing for extraction of channel parameters for remaining test environments (hilly terrain, mountainous terrain, suburban, and urban) and statistical analysis for development of accurate AG channel models for the various environments. In this update we provide some example results for these tasks, but first we provide an update to the over-water path loss modeling which has been extended to include over-fresh-water in addition to over-sea (salt water) conditions. We also comment on dispersion. 2. UPDATE OF AIR-GROUND CHANNEL MODELING FOR OVER-WATER CONDITIONS 2.1 NASA performed AG channel characterization flight tests for over-sea (salt water) conditions over the Pacific Ocean near Oxnard, California, USA on 11 June 2013. Flight tests for over fresh water conditions took place over Lake Erie near Cleveland, Ohio, USA on 22 October 2013. Based upon data gathered from these over-water flight tests, we have results for both path loss and dispersion. These flight tests measured channel impulse responses for both straight and oval-shaped flight paths. Impulse responses were measured in both L-band and C-band simultaneously: the two transmitters (one L-band, one C-band) were located at the ground site (GS), and four receivers—two for each band—were on the aircraft. Two separate antennas connect to the two receivers in each band. 2.2 Path loss generally follows the curved-earth two-ray (CE2R) model, with deviation due to a number of factors, including water surface roughness, non-ideal antenna patterns, intermittent multipath components, and some slow variation of received power due to channel measurement equipment imperfections. Path loss models for the over-water settings are as follows, with path loss in units of dB: L-band (1) where threshold elevation angle t = 5 degrees, = -1 for travel toward the GS and +1 for travel away from the GS, distance ranges from 1 d 28 km for fresh water and 2.2 d 24 km for sea water. The variable X is a zero-mean Gaussian random variable, with standard deviation X dB, and CE2R denotes the curved-earth 2-ray model. C-band (2) The same parameter definitions in the L-band model apply to the C-band model as well. Model parameters are provided in Tables 1 and 2. -3- ACP-WGF31 IP02 TABLE 1. L-BAND PATH LOSS PARAMETERS Setting A0,L,s (dB) nL,s Fresh 57.7 Sea 50.6 X,L,s X,L,l (dB) LL,s (dB) L0 (dB) (dB) LL,l (dB) dt (km) 1.4 2.8 1.8 1.1 3.2 1.8 6.6 1.5 2.8 1.2 1.0 4.8 1.1 9.1 TABLE 2. C-BAND PATH LOSS PARAMETERS Setting A0,C,s (dB) nC,s Fresh 53.6 Sea 60.0 X,C,s LC,s (dB) A0,l (dB) nC,l (dB) 1.8 2.6 2.2 53.7 1.6 2.3 1.7 63.9 X,C,l LC,l (dB) dt (km) (dB) 1.8 2.8 1.5 6.6 1.5 2.5 0.5 9.1 2.3 Dispersion was found to be fairly small, as expected in these open over-water environments, with root-mean square delay spreads (RMS-DS) typically less than 50 ns, with the occasional value up to nearly 250 ns. Delay spread statistics have been reported in a prior NASA report [1]. Detailed models (tapped delay line) for the over-water wideband channels are being developed, and should be complete in the coming month. 3. STATISTICAL ANALYSIS: SMALL-SCALE FADING AND DIVERSITY FOR THE OVER-WATER AG CHANNEL 3.1 As is well known, the over-sea (or over-fresh-water) AG channel is predominantly a lineof-sight (LOS) channel with a surface reflection. This is well-approximated by the CE2R model, which is largely deterministic. Other channel effects including intermittent multipath components and random magnitude and phase of the sea-surface reflection can be quantified statistically. For path loss this is embodied in the variation of loss about the (often linear) fit versus distance. For small scale fading this is done by specifying the distribution of the amplitude of the channel gain, after large scale effects are removed. In our LOS case, the most logical choice for modeling the amplitude distribution is the Ricean distribution. This two-parameter distribution is characterized by the strength of the LOS (non-fading) component and the strength of the remaining (assumed ~ Rayleigh distributed) components. Most often, the channel amplitude is normalized to have a mean-square value of 1, and in this case, the Ricean distribution is characterized by its so-called K-factor or Rice factor, where k=A2/(22), with A the amplitude of the LOS component, and 22 the power in the remaining components. Usually K=10log(k) dB is specified. The normalized Ricean probability density function is given by (3) with r the pdf variable (amplitude), and I0 the modified Bessel function of first kind, order zero. 3.2 In order to actually compute the parameters of this small scale fading distribution, strictly, one must determine the spatial region over which the small scale fading statistics can be assumed constant. The extent of this region is termed the stationarity distance. Our conservative estimate (based on a procedure applied in other multipath channels) for this distance is 250C, where C is the Cband wavelength. In short, the channel statistics can be considered roughly constant within any interval less than or equal to this distance. -4- ACP WG-F31 IP02 OxnardCA***06-11-2013***FT1***L-band Rx1 22 KML Rician K Factor (dB) 20 KMB KML Linear Fit [n=0.07 , =1.0] 18 KMB Linear Fit [n=0.08 , =1.0] 16 14 12 10 5 10 15 20 Link Distance (km) Figure 1. L-band K-factor vs. link distance for over-sea setting With this stationarity distance, we were able to compute Ricean K-factors for the over-sea setting. In Figure 1 we show L-band K-factor vs. link distance computed by two different methods: ML denotes a maximum likelihood fit, and MB denotes a moment-based method for estimating K. Linear fits to the Kfactor are also provided, with n=slope and = standard deviation of the linear fit. It is clear that the Kfactor exhibits some two-ray-like behavior, with K generally larger than approximately 11 dB. Similar results pertain to the C-band K-factor, with K generally above 25 dB. The larger value of K for C-band results from the less-severe cancellation in the two-ray representation: the sea surface is smoother for Lband than it is for C-band since the L-band wavelength is approximately five times larger than the C-band wavelength, and in addition, the reflection coefficient is smaller at C-band than at L-band. The linear fit to C-band K-factor has an intercept (at dmin~ 2 km) approximately 29 dB, slope n=0.17 and standard deviation = 1.7 dB. OxnardCA***06-11-2013***FT1***L-band max(Rx1, Rx2) Total Received Power (dBm) -35 PRx1 -40 PRx2 max(PRx1, PRx2) -45 -50 -55 -60 -65 -70 -75 5 10 15 20 Link Distance (km) Figure 2. L-band received power vs. link distance for over-sea setting. -5- ACP-WGF31 IP02 3.3 Figure 2 shows a plot of the L-band received power for one straight over-sea flight path. The curves for the two individual L-band receivers (with antennas separated by ~1.84 m), along with the curve for the maximum power among the two, are shown vs. link distance. The two-ray “lobing” effect is clearly evident, and we note that for our stationarity distance of 250C ~15 m, the separation of the plots for the two receivers does show that when one antenna is receiving a minimum value of power, the other is not—this is a direct manifestation of the two-ray effect, since the curves are offset by ~ d, and this d is a function of the antenna separation and link distance. Thus if we had the ability to instantaneously select the antenna with the larger received signal, we could claim that for this setting, antenna diversity can increase received signal strength by up to approximately 10 dB in L-band. For larger antenna separations, the two curves for received power on the two antennas should become even more distinct in any such straight flight track. Since practical diversity schemes require estimation of received power over some time duration, the “diversity” implied by Figure 2 may not be easily obtainable in practice. In contrast, inter-band diversity between the C- and L-bands would be of great value, since the signals in the two bands are essentially uncorrelated. Over the entire flight track of Figure 2, the K factors for the two C-band receivers are 30.4 and 29.9 dB, and for the L-band receivers they are 12.8 dB. 4. EXAMPLE RESULTS FOR HILLY TERRAIN 4.1 Flight tests were conducted over hilly terrain near Latrobe, Pennsylvania, USA on April 15 2013. Figure 3 shows the Latrobe terrain. Here we provide some example results from recent processing of the flight test data. Figure 4 (left) shows path loss vs. link distance for one receiver in each band, along with CE2R model fits and free-space path loss for comparison. We also show a plot (right) of L-band path loss for the two receivers in the over-sea setting. The hilly terrain flight path was a straight path, parallel to a nearby ridge. As in the over-sea case, in hilly terrain the two-ray effects are more pronounced at L-band than at C-band. Linear fits to the hilly terrain measured path loss on the loglog scale show standard deviations ranging from 1.9-3 dB for C-band, and 3.2-3.6 dB for L-band. When comparing to the over-sea results, it is also clear that the two ray effect is more pronounced in the oversea setting than in the hilly terrain setting. This is as expected since water surfaces will generally be much more reflective than earth surfaces. Nonetheless, the surface reflection in the hilly terrain does cause “path loss peaks” seen in such “two-ray” channels—these peaks are just not as regular (~predictable) as in the over-water cases. Specific models for the path loss in the hilly terrain setting, analogous to models of (1) and (2), are currently under development. Figure 3. Terrain in the vicinity of Latrobe, Pennsylvania, USA. Path Loss (dB) LatrobePA***04-15-2013***FT1***C-band Rx1 & L-band Rx1 145 Free Space C-band 140 Free Space L-band 2-Ray C-band 135 2-Ray L-band 130 Measured C-band Measured L-band 125 120 115 110 105 100 95 2.24 3 4 5 6 7 8 9 10 Link Distance (km) 12 15 17 Path Loss Recorded by Sounder (dB) -6- ACP WG-F31 IP02 OxnardCA***06-11-2013***Track2***L-band Rx1&2 150 140 130 Measured L-band Rx1 Measured L-band Rx2 Free Space PL 2-Ray Curved Earth 2-Ray Flat Earth 120 110 100 90 80 10 4 Link Distance (m) Figure 4. Left: path loss vs. distance for one C-band and one L-band receiver, hilly terrain; and Right: path loss vs. distance for two L-band receivers, over-sea. 4.2 The hilly terrain environment also proved more dispersive than the over-water AG channel. This is expected due to the presence of hills and the nearby suburban area of Latrobe, PA. In Figure 5 we show a plot of RMS-DS vs. link distance for the same straight flight path as in Figure 4. We have applied a moving average to the results to smooth them and reduce noise. Of particular interest are the RMS-DS “bumps” at several values of link distance. These occur when the geometry is such that a strong reflection (or several) is received from one of the large buildings near Latrobe. Figure 5. RMS-DS vs. distance for straight flight path, hilly terrain. 4.3 Figure 6 shows a sequence of power delay profiles (PDPs) for this flight track, illustrating the cause of the “bump” in the RMS-DS plot at link distance approximately 5.8 km. In addition to the strong LOS component (power ~ - 40 dBm), we have the surface reflection (~ - 60 dBm) at very small relative delay plus another “distant reflection” from another obstacle. Our analysis of maps and the geometry points to a very large building as the source of this reflection. Table 3 provides a summary of RMS-DS statistics for the hilly terrain environment. -7- ACP-WGF31 IP02 Figure 6. Sequence of power delay profiles for RMS-DS “bump” in Figure 4. TABLE 3. HILLY TERRAIN RMS-DS STATISTICS RMS Delay Spread FT1 FT6 5. Original Data Sequence Moving Averaged over 100 PDPs Moving Averaged over 1000 PDPs Original Data Sequence Moving Averaged over 100 PDPs Moving Averaged over 1000 PDPs Mean (ns) 12.9 35.7 Median (ns) Max (ns) 10.9 11.1 11.2 10.9 18.6 19.3 267.2 87.0 57.0 995.7 371.8 349.2 Standard Deviation (ns) 9.8 6.6 5.7 55.7 42.9 40.4 SUMMARY 5.1 Continuing progress is being made on developing models for the UAS AG channel in multiple GS environments. Path loss in hilly terrain was found to exhibit two-ray behavior as in the overwater settings, but with less regular variation with distance, given the less regular and less reflective earth surface in comparison to the water surfaces. Small scale fading has been modeled with Ricean statistics, with Ricean K-factors on the order of 13 dB for L-band, and 30 dB for C-band. Our technique for estimation of stationarity distance will enable computation of small scale fading statistics for additional GS environments. We also found that the hilly terrain AG channel is more dispersive than the over-water channels. This is as expected, since terrain features and large buildings present in this setting can act as good reflectors. 6. NEXT STEPS 6.1 Future work includes processing additional data for other settings (urban, mountainous, desert, and suburban), and subsequent development of path loss and small scale fading models. Additionally, wideband tapped delay line models that account for all multipath components will also be developed for all settings.