Please insert here the title of your abstract
advertisement

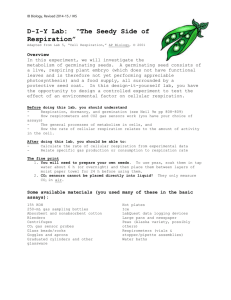
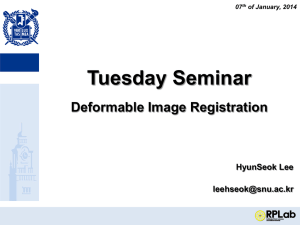
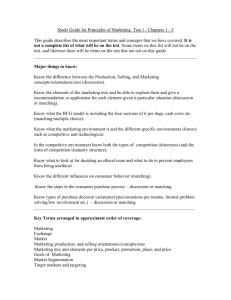
Evaluation of an automated deformable matching method for quantifying lung tumor motion in respiration-correlated CT images Gig Mageras1, Sarang Joshi2, Brad Davis2, Alex Pevsner1, Agung Hertanto1, Ellen Yorke1, Kenneth Rosenzweig1, Yusuf Erdi1, Sadek Nehmeh1, John Humm1, Steven M Larson1, C Clifton Ling1 1 Departments of Medical Physics, Radiation Oncology, and Radiology, Memorial Sloan-Kettering Cancer Center, New York, NY, USA; and Departments of Computer Science and Radiation Oncology, University of North Carolina, Chapel Hill, NC, USA 2 Abstract We have investigated an automated procedure of deformable CT-to-CT matching for determining lung tumor motion in CT data sets at different respiration phases of the same patient. The deformable matching procedure uses a high-dimensional transformation to map voxels between two CT data sets; the transformation is then used to transfer delineated organs from one CT data set onto the other, thus quantifying organ motion and shape changes. We have evaluated the accuracy of the procedure in predicting the GTV motion between CT data sets at end expiration and end inspiration of six patients treated for nonsmall cell lung carcinoma. Preliminary results comparing the model prediction with manual delineation as a reference indicate an estimated accuracy in determining the GTV boundary of 0.7 mm (median) and 3.1 mm (95% confidence); the latter number is comparable to the estimated uncertainty of one CT slice thickness (2.5 mm) in the manual delineation along the superior-inferior direction. Keywords Segmentation, image fusion, radiation treatment planning, respiration, 4D computed tomography, lung cancer Introduction It is well known that respiration induces significant anatomic motion in the thorax. Recently CT imaging techniques have been developed, variously referred to as respiration-correlated CT or 4D-CT, that provide 3D image sets at multiple respiration phases from a single CT scan [1,2,3,4]. These imaging techniques provide valuable information on tumor and other anatomic motion with respiration that may improve the accuracy of precision radiotherapy by determining appropriate planning target volume margins and assessing the need for respiration management at treatment, such as breath hold or respiration gating. A hurdle in realizing these gains is the need to define the gross tumor volume (GTV) in the large number of images, from 2 to 10 times more than standard practice, depending on the number of respiration phases sampled. It is therefore highly desirable to have software tools that automatically segment the GTV in the image sets at different phases, using the physician-drawn contours at one phase as a starting point. To this end, the University of North Carolina has developed an automated deformable CT-to-CT matching tool that can predict changes in organ shape between image data sets. In this paper, we evaluate the application of this tool to defining GTV motion in respiration-correlated CT image sets of patients treated for nonsmall cell lung carcinoma (NSCLC). Material and methods The deformable matching model quantifies anatomical variation by constructing a high-dimensional registration transformation h that brings a study CT data set of a patient (in this case, a CT at the end inspiration [EI] phase) into correspondence with a reference CT image set Ip(x) of the same patient (i.e., the planning CT at the end expiration [EE] phase). The model assumes that the reference and study CT data sets are previously registered by alignment of the skeletal anatomy. The deformable transformation has dimensions on the order of the image resolution, according to h : x ( x1 , x2 , x3 ) h( x) ( x1 , x2 , x3 ) (u1 ( x), u 2 ( x), u3 ( x)) with the vector field u(x) = (u1(x) ,u2(x), u3(x)) describing the local tissue displacement. Registration is defined using a mean squared error distance measured between the transformed study image Is(h(x)) and the reference image Ip(x), i.e., D(h) = ∫ |Ip(x)–Is(h(x))|2 dx, where the integration is over the coordinate system of the study image. The transformation h is estimated in a manner that minimizes the distance D(h) while at the same time constraining the transformation to satisfy the laws of continuum mechanics, derived from viscous fluid modeling using the Navier-Stokes equations. Further details of viscous fluid modeling are given in [5,6]. Having computed the transformation h that maps the study CT onto the planning CT, the segmentation of the study CT is accomplished by applying the inverse transformation to the segmentations (i.e. physician-drawn contours) of the planning CT. The transformation h thus quantifies the organ motion and fine featured organ shape changes between the two CT data sets. Data for evaluating the automated procedure consist of CT image sets of patients treated for NSCLC, acquired at different respiration phases on a 4-slice scanner (LightSpeed GX/i, GE Medical Systems, Waukesha, WI). The CT acquisition uses a cine mode, in which CT data are acquired for a complete respiratory cycle at each couch position while simultaneously recording the patient’s respiration with a monitor (Real-time Figure 1: (Left, center) Axial and coronal sections of superimposed CT data sets of a patient at end expiration (EE) and end inspiration (EI), prior to deformable matching. Axial section shows manually delineated GTV at EE (green) and EI (red). (Right) Surface rendering of GTV at EE (green) and EI (red). Position Management System, Varian Medical Systems, Palo Alto, CA) consisting of a passive reflective marker placed on the patient’s thorax, which is observed by a CCD camera mounted on the CT couch. CT slices are retrospectively resorted according to respiration phase (Advantage 4D, GE Medical Systems). To provide a standard against which to compare the registration model, the GTV is manually delineated in the CT images at end expiration, and then the contours are used as a visual guide to delineate the GTV at end inspiration. The GTV surface differences between the model prediction and manual delineation are analyzed with a software tool developed for this purpose, which is an adaptation of the method of Remeijer et al [7]. The analysis tool constructs a triangular tiled surface of the reference object (i.e., the manually delineated GTV in the EI data set) and reads in a tiled surface of the study object (i.e., the model prediction of the GTV in the EI data set given the manual delineation in the EE data set). The analysis tool then casts rays radially outward from the centroid (origin) of the reference object, determines the intersection of the ray with the surface (reference or study) furthest from the origin, and from the intersection point finds the nearest distance to the surface of the other (study or reference) object. The distances are plotted on a polar map of angles theta (polar angle with 0 and 180 corresponding to the superior and inferior directions) and phi (azimuthal angle with 90 and 270 corresponding to the posterior and anterior directions). Results and discussion We have evaluated the automated procedure on respirationcorrelated CT images from six patients treated for NSCLC. Figure 1 shows an example prior to the application of the deformable matching. Axial and coronal views of the two CT data sets (left, center panels) are overlaid and blended; regions where the anatomy differs between the two data sets show up as darker gray, such as in the diaphragm, mediastinum and GTV (at center of cross hairs). The two CT data sets come from the same cine acquisition, thus are already rigidly matched according to the patient’s stationary skeletal anatomy. The respiration-induced changes in internal anatomy are clearly evident. The right panel shows a surface display of the manually delineated GTV at EE (green) and EI (red). The rectangle in the left and center panels indicates the volume of interest (VOI) in which deformable matching will be done. Figure 2 shows the result after the deformable matching. Note the improved correspondence of the CT data inside the VOI (left and center panels), compared to the rest of the image where deformable matching was not applied. The same transformation is applied to deform the delineated GTV from the EE data set into the EI data set (right panel, green), note the good agreement with the manually delineated GTV at EI (red). Figure 2: (Left, center) Axial and coronal sections of superimposed CT data sets after deformable matching is applied inside the rectangular region. (Right) Surface rendering of model predicted (green) and manually delineated GTV (red) at end inspiration. 0 Superior 4 Theta (degrees) 30 6 60 42 0 90 Post -2 Ant 120 -4 -6 150 180 8 mm 6 4 2 0 -2 -4 -6 -8 Inferior 0 60 Conclusion 120 180 240 300 360 Phi (degrees) Figure 3: Polar map of surface differences between GTV at EE and EI, prior to deformable matching. Positive (negative) values indicate that GTV surface at EI is outside (inside) the GTV at EE along those directions. Figure 3 shows a polar map of the GTV surface differences between the manually delineated GTV at EE and EI, corresponding to the right panel of Figure 1. One observes differences up to 8 mm, with the largest differences occurring at the inferior and superior GTV borders, owing to the GTV motion primarily in the superior-inferior direction. Figure 4 is a polar map of the surface differences between modelprediction and manually drawn GTV and EI, corresponding to the right panel of Figure 2. The agreement is very good, with surface differences of about 2 mm or less over all angles in this example. Analysis of surface difference data over all angle and patients yields median and 95 percentile values for the absolute surface difference of 0.7 mm and 3.1 mm, respectively. The latter number is comparable to the estimated uncertainty of one CT slice thickness (2.5 mm) in the manual delineation along the superior-inferior direction. 0 -2 Superior -1 30 3mm Theta (degrees) 2 60 1 90 Post 0 0 Ant -1 120 -2 1 150 2 180 0 60 -3 2 Inferior 120 180 240 Phi (degrees) 300 plus a margin for microscopic disease) is not underdosed at any phase, one strategy would be to design a volume for intrafractional motion that encloses the CTV at all phases. For gated treatments, one can identify the phase interval of the respiratory monitor corresponding to minimum GTV motion, then design an intra-fractional motion volume to enclose the CTV for only that phase interval. To form the planning target volume, an additional margin will be required for interfractional variations in target position [8] as well as patient positioning errors. 360 Figure 4: Polar map of surface differences between model prediction and manually drawn GTV at EI and EI, following deformable matching Once the GTV is defined at each respiration phase, the information can be used in different ways in planning treatment. The extent of GTV motion so determined can be used to assess whether respiration management at treatment, such as breath hold or gating techniques, is warranted. If the intent is to treat without respiratory gating and one wants to ensure that the clinical target volume (CTV, enclosing the GTV We have investigated an automated procedure of deformable CT-to-CT matching for determining tumor motion in lung with CT data sets at different respiration phases. Preliminary results comparing the model prediction with manual delineation as a reference indicate an estimated accuracy in determining the position of the GTV boundary that is comparable to the CT resolution. Further plans are to evaluate the procedure in larger numbers of patient data sets, and to evaluate its applicability to other disease sites, such as CT-guided treatment of prostate. Acknowledgements This work was supported in part by U.S. National Institutes of Health grant P01-CA59017, Varian Medical Systems, and General Electric Medical Systems. References [1] Ford E C, Mageras G S, Yorke E and Ling C C 2003 Respiration-correlated spiral CT: a method of measuring respiratory-induced anatomic motion for radiation treatment planning. Med Phys 30 88-97 [2] Vedam S S, Keall P J, Kini V R et al 2003 Acquiring a four-dimensional computed tomography dataset using an external respiratory signal. Phys Med Biol 48 45-62 [3] Low D A, Nystrom M, Kalinin E et al 2003 A method for the reconstruction of four-dimensional synchronized CT scans acquired during free breathing. Med Phys 30 1254-63 [4] Rietzel E Chen G T Doppke K P et al 2003 4D computed tomography for treatment planning Int J Radiat Oncol Biol Phys 57 (Suppl 1) S232-3 [5] Christensen G E, Joshi S C and Miller M I 1997 Volumetric transformation of brain anatomy. IEEE Trans Med Imaging 16 864-877 [6] Joshi S and Miller M I 2000 Landmark matching via large deformation diffeomorphisms. IEEE Trans Image Processing 9 1357-1370 [7] Remeijer P, Rasch C, Lebesque J V et al 1999 A general methodology for three-dimensional analysis of variation in target volume delineation. Med Phys 26 931-940 [8] Ford E, Mageras G S, Yorke E et al 2002 Evaluation of respiratory movement during gated radiotherapy using film and electronic portal imaging. Int J Radiat Oncol Biol Phys 52 522-531